
A Strength Pareto Evolutionary Algorithm for Solving the Capacitated
Vehicle Routing Problem with Time Windows
Wissam Marrouche
1 a
and Haidar M. Harmanani
2 b
1
School of Computing, University of Portsmouth, Portsmouth, U.K.
2
Computer Science Department, Lebanese American University, Byblos, Lebanon
Keywords:
Capacitated Vehicle Routing Problem with Time Windows, Strength Pareto Evolutionary Algorithm, Hill
Climbing, Multi Objective Optimization.
Abstract:
The capacitated vehicle routing problem with time windows (CVRPTW) belongs to a set of complex com-
binatorial optimization problems that find major application in logistic systems and telecommunications. It
is a complex variant of the well studied capacitated vehicle routing problem (CVRP). Few meta-heuristic
approaches have been proposed to solve the CVRPTW problem in literature. In this paper, we examine a
population based meta-heuristic algorithm, more precisely the strength Pareto evolutionary algorithm SPEA2
with hill climbing as a local search. The novelty of the approach lies in the choice of multi objective evolution-
ary algorithm namely SPEA2, its suggested evolutionary operators, and the optimization for three objectives:
the number of routes, the total distance travelled, and the average time per route. The proposed algorithm is
implemented using Python, and tested on the Solomon’s instances benchmark. Favorable results are reported
and suggestions for further improvements are discussed.
1 INTRODUCTION
The vehicle routing problem (VRP) is a combinatorial
optimization problem that arises in major application
logistic systems such as during organizing delivery
and/or collection of payloads in a given geographical
region. It is one of the most studied problem in op-
timization field and the advancement brought to this
problem can benefit the applied operational research
and management science (Rizzoli et al., 2004). The
plain VRP (Toth and Vigo, 2001) can be stretched out
by imposing constraints on one or more variables of
the standard problem. The capacitated vehicle routing
problem (CVRP) is the classical version, where a lim-
ited vehicle capacity is taken into account along with
routes optimization. If we relax the multiple route
constraint and force all customers to be served by a
single route, the CVRP reduces into the standard trav-
elling salesman problem, proving that CVRP is NP-
hard (Rizzoli et al., 2004). Furthermore, when the
VRP is combined with capacity and time windows
constraints, the new variant is known as CVRPTW.
Similarly to (Toth and Vigo, 2001), in this work we
a
https://orcid.org/0000-0002-0626-1442
b
https://orcid.org/0000-0001-5416-4383
consider CVRPTW with multi identical vehicles and
single depot while optimizing for certain objectives
that we will detail shortly in the next section.
The CVRPTW problem can be tackled using exact
methods like integer linear programming (ILP); how-
ever this approach is computationally expensive since
the problem is known to be an NP–hard (Dash and
Anekal, 2014). Furthermore, the time windows es-
tablish a series of precedence on visits, which makes
the problem asymmetric, even if the distance and
time matrices were originally symmetric. In practice,
we can rely on heuristics and metaheuristic methods,
which provide possible approaches to good solutions
for industrial scale problems (Rizzoli et al., 2004). In
this context, we tackle the CVRPTW problem using
the population-based strength Pareto evolutionary al-
gorithm (SPEA2) introduced by Zitzler et al. (Zit-
zler, 2001). Here, SPEA2 is hybridized with a hill
climbing local search to enhance the convergence to a
good solution. The novelty of the work is that it op-
timizes for three objectives mainly the total distance,
the number of routes (equal to the number of vehicles
used) and the average time per route which is a new
parameter introduced to balance the different vehicles
operation time and route lengths.
96
Marrouche, W. and Harmanani, H.
A Strength Pareto Evolutionary Algorithm for Solving the Capacitated Vehicle Routing Problem with Time Windows.
DOI: 10.5220/0010640900003063
In Proceedings of the 13th International Joint Conference on Computational Intelligence (IJCCI 2021), pages 96-106
ISBN: 978-989-758-534-0; ISSN: 2184-2825
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The remains of the papers are organised as
follows: Section 2 describes mathematically the
CVRPTW problem, Section 3 provides a brief listing
of VRP related work in the literature and Section 4
offers a comprehensive overview of the methodology
for our proposed solution. Section 5 reports and eval-
uate the simulation results. Finally, Section 6 sum-
marizes the results and makes suggestions for further
research.
Figure 1: Representation of a typical solution to VRP.
2 PROBLEM FORMULATION
Formelly, the CVRTPW problem can be stated as fol-
lows (Jawarneh and Abdullah, 2015):
Relying on Solomon’s 1987 model, the problem
formulation presupposes N + 1 customers and K ve-
hicles. Customer 0 is positioned at the depot node,
and each arc in the network constitutes a link between
two nodes i, j and determine the direction of travel
with travel time t
i j
and cost c
i j
. Every route starts
from the depot, navigates through a set of customers,
and finally goes back to the depot as in Fig 1. Ev-
ery vehicle is related to one route in the network. In
Solomon’s 56 CVRPTW 100 customer instances, the
speed of the vehicle is considered to be unitary; which
means that just one unit of time is needed to traverse
one unit of distance. As previously iterated, each ve-
hicle has the same capacity q
k
, and every customer
with demand m
i
must be serviced only one time by
one of the K vehicles. The aggregation of the capac-
ity of all the demands on a given route must be less or
equal to the q
k
capacity of vehicle k embarking on this
route and no vehicles should be surcharged. The time
window restrictions for each node i are inferred by a
predefined time interval, an earliest arrival time (e
i
),
and a latest arrival time (l
i
). The vehicle must visit the
customer before the l
i
; if it reaches before the e
i
, then
it should stand by. Moreover, a service time f
i
for
each customer for a given loading and unloading time
is taken into consideration. Solomon considers this
loading and unloading time to be unique regardless of
the amount of the demands. Vehicles are expected to
complete their route within the total route time r
k
. We
define for CVRPTW given the subsequent parameters
and variables:
• x
i jk
=
0 if there is no arc from node i to node j
1 otherwise
i 6= j;i, j ∈ {0, 1, 2, . . . N}; k ∈ {1, . . .,K}
• t
i
arrival time at point i
• w
i
waiting time at point i
• K number of vehicles
• N number of customers (0 denotes the central de-
pot)
• c
i j
cost incurred in arc from customer i to cus-
tomer j
• t
i j
travel time between customer i and customer j
• m
i
demand at customer i
• q
k
capacity of vehicle k
• e
i
earliest arrival time at customer i
• l
i
latest arrival time at customer i
• f
i
service time at customer i
• r
k
maximum route time for vehicle k
The exact mathematical formulation for a general
CVRPTW problem is as follows:
Minimise
N
∑
i=0
N
∑
j=0, j6=i
K
∑
k=1
c
i j
x
i jk
(1)
Subject the equation to
K
∑
k=1
N
∑
j=1
x
i jk
≤ K for i = 0 (2)
N
∑
j=0
x
i jk
=
N
∑
j=1
x
i jk
≤ 1 for i = 0 and k ∈ {1,2,...,K}
(3)
K
∑
k=1
N
∑
j=0, j6=i
x
i jk
= 1 for i ∈ {1,2,...,N} (4)
K
∑
k=1
N
∑
i=0, j6=i
x
i jk
= 1 for j ∈ {1, 2, . . . , N} (5)
N
∑
i=1
m
i
N
∑
j=0, j6=i
x
i jk
≤ q
k
for k ∈ {1, 2, . ..,K} (6)
A Strength Pareto Evolutionary Algorithm for Solving the Capacitated Vehicle Routing Problem with Time Windows
97

N
∑
i=1
N
∑
j=0, j6=i
x
i jk
(t
i j
+ f
i
+w
i
) ≤ r
k
for k ∈ {1,2,...,K}
(7)
t
0
= w
0
= f
0
= 0 (8)
K
∑
k=1
N
∑
i=0, j6=i
x
i jk
(t
i
+t
i j
+ f
i
+w
i
) ≤ t
j
for j ∈ {1,2,.. . , N}
(9)
e
i
≤ (t
i
+ w
i
) ≤ l
j
for i ∈ {1,2,...,N} (10)
c
i j
=
q
(i
x
− j
x
)
2
+ (i
y
− j
y
)
2
(11)
Equation 1 is the objective function of the
CVRPTW problem. Constraint (2) shows the maxi-
mum K routes or vehicles leaving the depot. Equa-
tion 3 stresses that every route should start and termi-
nate at the main depot. Equations 4 and 5 guaranty
that each customer is serviced only once by exactly
one vehicle. Equation 6 describe the capacity and
equation 7 specify maximum travel time constraints.
Constraints (8), (9), and (10) account for the time win-
dow. Equation 11 computes the travel cost, where the
Euclidean i
x
is the x coordinate and i
y
is the y coordi-
nate of customer i.
3 RELATED WORK
Heuristics such as simulated annealing (SA) and
its improvements (Czech and Czarnas, 2002; Yasin
and Vincent, 2013), and iterated local search (Yasin
and Vincent, 2013) indicate that we can get good
CVRPTW solutions within an adequate amount of
time. It does a limited exploration of the search
space quickly, while meta heuristics abide by the prin-
ciples of intensification and diversification in their
search (Rizzoli et al., 2004). Population based meta
heuristic algorithms works well for global searches
because they offer global exploration and local ex-
ploitation capability over simple heuristics. In this
context, population-based and several evolutionary
and swarm intelligence-based algorithms like parti-
cle swarm optimization (PSO), ant colony optimiza-
tion (ACO), artificial bee colony algorithm (ABC),
for solving VRPTW can outperform simple heuris-
tics (Dixit et al., 2019). In general, bio-inspired
meta-heuristics were applied to the basic CVRP prob-
lem such as the cuckoo search algorithm which mim-
ics the nesting behavior of the cuckoo bird. The
advantage of cuckoo search is that it solves CVRP
in an acceptable time (Xiao et al., 2017). Cuckoo
search solves efficiently more elaborate VRP prob-
lems such as the VRP with heterogeneous fleet, mixed
backhauls (pickup and delivery) and time windows
(HVRPMBTW) (Meryem and Abdelmadjid, 2015).
Also, the bat algorithm (BA) is a new bio-inspired
meta-heuristic based on the echolocation behavior of
microbats when probing for their prey in nature. In
particular, the BA simulation results show that this
approach has a satisfactory performance in solving
VRPTW instances (Taha et al., 2017). Not to for-
get that bio-inspired approaches such as artificial im-
mune systems and neural networks are also consid-
ered in literature. For the VRP problem many con-
tributions have been made using hybrid algorithms:
using a greedy method for the initial solution fol-
lowed by tabu search (Udin et al., 2017) or based
on ant colony optimization (ACO) algorithm (Riz-
zoli et al., 2004) with a large neighborhood search
(LNS) algorithm (Messaoud et al., 2018). In general,
metaheuristics have the tendency to yield good results
when hybridized with local search methods (Rizzoli
et al., 2004; Dixit et al., 2019), adding specific prob-
lem intelligence in the enhancement of the solutions.
A hybrid genetic algorithm was proposed in (Vidal
et al., 2012) for multi-depot and periodic VRP. A sim-
ilar published work to our studied problem can be
found in (Chiang and Hsu, 2014) and (Hsu and Chi-
ang, 2012), which implements multi objective vehicle
routing problem with time windows (MOVRPTW)
and optimizes for two concurrent objectives, namely
the total distance and the number of vehicles to ob-
tain the set of Pareto optimal solutions. In (Hsu and
Chiang, 2012), enhanced reproduction operators are
proposed for the CVRPTW problem. An even closer
work to this paper is found in (Tan et al., 2006),
which implements a hybrid multi objective evolution-
ary algorithm (MOEA) accommodating the sequence-
oriented optimization. Also (Garcia-Najera and Bul-
linaria, 2011) propose an improved MOEA for the
VRPTW optimising mainly for two objectives: the
number of routes and the total distance travelled. It
also introduces as a third objective the completion or
delivery time but does not report in its table result
the three objectives explicitly but it rather provides a
coverage performance metric analysis, which makes
it hard for us to compare it directly to our three objec-
tives results.
The major contribution of this paper is the in-
troduction of strength Pareto evolutionary algorithm
SPEA2 to solve for the CVRPTW problem. Also,
SPEA2 is improved with a local search namely hill
climbing operator to reduce the total distance trav-
elled and therefore ensure a fast convergence. In
ECTA 2021 - 13th International Conference on Evolutionary Computation Theory and Applications
98

fact, (Zitzler, 2001) introduced SPEA2 as an improve-
ment to SPEA. The advantage of the SPEA2 algo-
rithm is that it is an effective evolutionary population
search algorithm for obtaining Pareto optimal solu-
tions. SPEA2 is more consistent than NSGA-II in
terms of diversity and convergence at the expense of
computational complexity (King et al., 2010). In this
work, SPEA2 optimizes for three objectives (total dis-
tance, number of routes, and average time per route)
concurrently to solve the single depot CVRPTW. Re-
ducing the average time per route is an important as-
pect to consider because it lowers the driver cost time
and balances the routes lengths. Another contribution
of this paper is that it proposes its own evolutionary
operators. Promising results were achieved using this
new approach which makes it a good reference for
comparison in the presence of 3 objectives.
4 SOLUTION METHODOLOGY
Our proposed CVPRTW solution is based on the hy-
brid SPEA2-local search algorithm as detailed in the
following subsections:
4.1 Solution Encoding
Based on this extracted information from the
Solomon’s benchmark 100-customer 56 instances
(1987) (see (Dixit et al., 2019) for more details),
we populate two data structures namely: Nodes list
Nodes, and the fully connected graph matrix G of
distances between nodes that will help us retrieve the
cost c
i, j
. Again, each node in Nodes contains infor-
mation about position coordinates (i
x
,i
y
), demand m
i
,
ready time e
i
, service time f
i
and due date of the de-
livery l
i
. When scheduling we will enforce that the
delivery arrival to a customer i lies within the time
window [e
i
, l
i
]. As for the arrival time t
i
, the wait-
ing time at point i w
i
and the travel time between two
nodes t
i, j
they are computed dynamically during the
scheduling process.
A typical solution S to this problem is represented as
an object with the following fields: an array of routes
(each route
k
has the list of visited nodes), an aver-
age time per route, and a total travelled distance. In
fact, the minimization of average completion time per
route is linked to work-in-progress inventory manage-
ment (Li et al., 2015) which can yield balanced routes
lengths.
4.2 Building the Initial Population using
a Greedy Approach
We generate a feasible pool of initial solutions using
a greedy algorithm (random seeds, i.e. each time visit
the nodes in a different random order). Our proposed
greedy algorithm, shown in Fig. 2, ensures that the ca-
pacity constraint is met as well as the time windows
requirement for the initial solution. A validate func-
tion is also implemented to ensure that the solution
is feasible in terms of capacity, time windows con-
straints, and due date. If the number of available vehi-
cle is surpassed, we relax this constraint and consider
this greedy solution as valid. The check for the num-
ber of vehicle is postponed till the end of the overall
simulation where practically in the majority of cases
it will be valid.
Greedy algorithm
1: nodes ← list of nodes
2: S ← some initial empty solution
3: VisitF lags[ ] ← array of flag of visited nodes
4: Shuffle the order of nodes to have each time different solutions
5: repeat
6: Route ← some initial empty route
7: for all n ∈ nodes do
8: if VisitFlags[n] = 0 then not visited
9: Append n to Route
10: if not (capacity and time window are respected in Route) then
11: Remove n from Route
12: else
13: VisitF lags[n] = 1
14: Append Route to S
15: until allVisited (VisitFlags)
Figure 2: Greedy Algorithm Pseudo Code.
4.3 Tweak Operator
The tweak operator yields each time a slightly ran-
domly different candidate solution. It is collectively
called a modification procedure and it makes the
search exploitative. It was implemented as follows:
Considering a certain solution S, there are two op-
tions for the tweak operator: (a) two randomly se-
lected nodes in S are within the same route – in that
case we just perform a regular swap; (b) two ran-
domly selected nodes k and l are in different routes
namely route i, and route j. This option is more com-
plicated and firstly, we move a node k of the route i, to
the second route j and insert it next to the second node
l in the route j. This tweaked S or S∗ can decrease the
number of routes. More precisely, after applying this
tweak, a route i might become empty so we simply
remove it from S∗ as a book keeping measure. Us-
ing the validate operator, we check the solution; if it
is valid we return S∗ otherwise we roll back to the
initial S, and we repeat this trial a number of times
(9 times determined empirically) until feasible. If it
fails, we simply return the initial solution S.
A Strength Pareto Evolutionary Algorithm for Solving the Capacitated Vehicle Routing Problem with Time Windows
99

4.4 Recombination Operator
The recombination operator is an “asexual recombi-
nation”. One of its advantages is that it explores the
search space and avoids the fall into local minima. In
fact, the implementation is given as follows:
Given a solution S, we select randomly two dif-
ferent routes in the solution and perform a fixed-point
recombination considering the middle of each route,
which results in two new offspring routes. If we want,
we then mesh randomly the two offspring routes to
obtain a uniform recombination. Using the validate
operator we check the new solution S∗ obtained af-
ter removing from S the parent routes and adding the
offspring routes; if it is valid we return S∗, otherwise
we roll back to S, and we repeat the trial a number of
times equal to the total number of routes plus a bias
until feasible. If it fails, we simply return the initial
solution S. Here is an example in Fig 3.
Recombination Operation
1: Apply fixed-point recombination after determining the middle of each route
Parent Route 1: {0-6-7-3-2-8-10-0}
Parent Route 2: {0-4-1-5-9-0}
2: Apply the fixed-point recombination
Offspring Route1: {0-6-7-3-5-9-0}
Offspring Route2: {0-4-1-2-8-10-0}
3: We then optionally mesh the offspring randomly to obtain multiple point uniform
recombination
Offspring Route1: {0-4-7-2-5-10-0}
Offspring Route2: {0-6-1-3-8-9-0}
Figure 3: Recombination Example: Fixed Point and Uni-
form.
4.5 Fuse Operator: Na
¨
ıve Merge
The advantage of this brute force operator (which is
also an asexual recombination) is that if applied with
a certain low probability, it will help converge quickly
to a lower number of routes specially at early genera-
tions of the simulation. Its implementation details can
be described as follows:
Given a certain solution S, we select two random
routes and join them together, which results in a new
route that we add to the route set of S after removing
the two parents and thus obtain S∗. Using the vali-
date operator we check this new solution S∗; if it is
a valid one, we return it otherwise we roll back, and
we repeat the trial a number of times equal to the total
number of routes plus a bias until feasible. If it fails,
we simply return the initial solution S.
4.6 Hill Climbing Operator
The advantage of this local search operator is that it
makes the search converge toward optimal solutions
after the application of any of the previous operators.
In fact, the steepest ascent hill climbing with replace-
ment (Luke, 2013) is used to reduce the total cost (dis-
tance travelled) of a given offspring solution; in other
words, to force the evolution of population downhill
for this objective. Each time the local search operator
is called by hill climbing, it performs either a tweak or
a recombination (mutually exclusive) operation with a
certain probability to be determined empirically. The
rational behind this can be justified by the fact that we
need to change from one type of operator to another
to escape local minima. See Fig 4.
Steepest Ascent Hill Climbing.
1: n ← 25 Number of attempts to sample the gradient
2: TweakRate ← 0.8 In this case RecombinationRate is 0.2
3: CurrentSol ← Some initial candidate solution
4: repeat
5: NewSol ← Tweak(CurrentSol, TweakRate)
6: for i = 0 to n -1 do
7: Temp ← Tweak(CurrentSol,TweakRate)
8: if fitness(Temp) > fitness(NewSol) then fitness is the distance
9: NewSol ← Temp
10: if fitness(NewSol) > fitness(CurrentSol) then
11: CurrentSol ← NewSol
12: until we have run out of time
13: return CurrentSol
Figure 4: Steepest Ascent Hill Climbing Algorithm as a Lo-
cal Search.
4.7 SPEA2 Fitness Computation
We optimize for the three objectives namely total dis-
tance of routes D (linked to fuel cost), number of
routes K (associated with number of vehicles needed),
and average time per route T
avg
(related to driver cost
and balanced route length). More precisely, we can
formulate the objectives as follows: based on equa-
tion 1 the total distance D is given as in equation 12:
D =
N
∑
i=0
N
∑
j=0, j6=i
K
∑
k=1
c
i j
x
i jk
(12)
and based on equation 7 the average time per route is
equal to:
T
avg
=
K
∑
k=1
N
∑
i=1
N
∑
j=0, j6=i
x
i jk
(t
i j
+ f
i
+ w
i
)/K. (13)
The problem is reduced to optimizing for D,K,
and T
avg
. In other words, the fitness function is a
vector-valued function that rely on the Pareto domi-
nance concept and is defined as:
f = (D,K,T
avg
) (14)
An objective vector f
1
dominates another objective
vector f
2
( f
1
f
2
) if no component of f
1
is smaller
than the corresponding component of f
2
and at least
one component is greater (Zitzler et al., 2004).
Each individual i in the archive A
t
and also in the
population P
t
(refer to Fig 6) is given a strength value,
ECTA 2021 - 13th International Conference on Evolutionary Computation Theory and Applications
100

Strength(i), denoting the number of solutions it dom-
inates as described by equation 15.
Strength(i) =
∑
i, j∈P
t
∪A
t
[i j], (15)
where the bracketed notation [S] is 1 if S is true and
0 otherwise. Based on this definition, the raw fitness
f (i) of an individual i is determined as follows (Mar-
rouche et al., 2018):
f (i) =
∑
i, j∈P
t
∪A
t
, ji
Strength( j). (16)
The raw fitness is evaluated by the strengths of its
dominators in the archive and in the population,
where the strength of a solution is defined as the num-
ber of other solutions in the current population that it
dominates. Ties are resolved using a nearest neighbor
density estimation function, Density(i).
Density(i) =
1
σ
k
i
+ 2
, (17)
where σ
k
i
is the Euclidean distance of the objective
values between a given solution i and the k
th
near-
est neighbor of the solution, where k =
p
(M
P
+ M
A
),
where M
P
is the population size and M
A
is the archive
size. For every individual in the population, we sort
the population by distance to that individual, and take
the k
th
closest individual. The algorithm has a runtime
complexity of O(M
2
P
lgM
P
), as described in (Mar-
rouche et al., 2018).
4.8 SPEA2 Algorithm
SPEA2 is a multiple objective optimization (MOO)
algorithm and an evolutionary algorithm in the
paradigm of evolutionary computation. The objective
of the algorithm is to localize and preserve a front of
non-dominated solutions, preferably a set of Pareto
optimal solutions. We achieve this goal by construct-
ing an archive as in Fig. 5 and relying on an evolu-
tionary routine as introduced in Section 4.9. We pro-
pose the deployment of the following SPEA2 algo-
rithm pseudo code in Fig. 6 based on (Luke, 2013).
4.9 Evolve Operator
The SPEA2 requires an evolution mechanism, which
we base on four operators, namely tweak, recombine,
na
¨
ıve merge and hill climbing operators applied se-
quentially given certain probabilities that we will list
shortly in Section 4.10 and that we determine empiri-
cally. This elaborate and diversified operator exploits
and explores the search space mainly without falling
into the trap of local minima.
SPEA2 Archive
1: P ← {P
1
, ...,P
m
} population
2: O ← {O
1
, ...,O
n
} objective to assess with
3: a ← desired archive size
4: A ← Pareto non-dominated front of P the archive
5: Q ← P - A
6: if kAk < a then
7: Sort Q by fitness
8: A ← A∪ the a − kAk fittest individuals in Q, breaking ties arbitrarily
9: while kAk > a do
10: Closest ← A
1
11: c ← index of A
1
in P
12: for all individual A
i
∈ A except A
1
do
13: l ← index of A
i
in P
14: for k = 1 to m-1 do
15: if DistKthNearest(k, P
l
) < DistKthNearest(k, P
c
) then
16: Closest ← A
i
17: c ← l
18: break
19: else
20: if DistKthNearest(k, P
l
) > DistKthNearest(k, P
c
) then
21: break
22: A ← {Closest}
23: return A
Figure 5: SPEA2 Archive Construction Algorithm (Luke,
2013).
SPEA2 Algorithm
1: m ← desired population size
2: a ← desired archive size typically a = m
3: P ← {P
1
, ...,P
m
} build initial population using a greedy method Fig. 2
4: repeat
5: AssessFitness(P)
6: P ← P ∪ A
7: BestFront ← Pareto Front of P
8: A ← Construct SPEA2 Archive of size a from P
9: P ← Evolve(A), using tournament selection of size 3
10: until we have run out of time
11: return BestFront
Figure 6: SPEA2 Algorithm Pseudo Code based on (Luke,
2013).
Table 1: Parameters settings of SPEA2 for C1, RC1 bench-
marks.
Parameter # Gen Tweak Recombine Fuse popsize HC Bias
Values+ 260 0.8 0.4 0.1 200 25 0
4.10 Setting of Parameters
For the benchmarks we tried fixed-point and uniform
recombination and we selected the better of the two
reported solutions. We repeated the experiment ten-
tatively 18 times for each recombination type (fixed
point and uniform). Two main groups of configura-
tions values were identified. In fact, TABLE 1 is more
exploratory than TABLE 2, which tends to be more
exploitative, since a bias of zero implies less number
of iterations for the deterministic operators. Excep-
tionally, for the R1 benchmark some results were bet-
ter obtained using the first configuration while others
the second, so we ended up choosing the better solu-
tion among the two. As for hill climbing the distribu-
tion of tweak operator ratios are: 0.8 tweak and 0.2
recombination (to escape local minima). All the con-
figuration parameters were determined empirically re-
lying on a step wise approach, i.e. changing one pa-
rameter at a time while fixing others.
A Strength Pareto Evolutionary Algorithm for Solving the Capacitated Vehicle Routing Problem with Time Windows
101

Table 2: Parameters settings of SPEA2 for C2, RC2 bench-
marks.
Parameter # Gen Tweak Recombine Fuse popsize HC Bias
Values* 150 0.8 0.4 0.1 200 25 10
Table 3: Results of Hybrid SPEA2 Applied to Solomon’s
100-customer benchmark.
Benchmark Ours BCO
Distance Routes Avg Time Distance Routes
C101 828.94 10 982.89 828.94 10
C102 864.04 10 987.26 828.94 10
C103 828.94 10 982.89 835.71 10
C104 824.78 10 995.40 885.06 10
C105 866.23 11 O 916.78 828.94 10
C106 833.24 10 983.32 828.94 10
C107 836.76 10 983.67 828.94 10
C108 831.98 10 983.20 831.73 10
C109 828.94 10 982.89 840.66 10
C201 591.56 3 3197.19 591.56 3
C202 591.56 3 3197.19 591.56 3
C203 659.72 4 O 2992.22 593.21 3
C204 667.84 4 O 2561.31 606.90 3
C205 588.88 3 3196.29 588.88 3
C206 588.49 3 3196.16 588.88 3
C207 588.29 3 3220.13 590.59 3
C208 588.49 3 3196.16 593.15 3
R101+ 1669.81 20 O 180.85 1643.18 20
R102* 1499 18 184.37 1476.11 18
R103+ 1240.08 15 O 196.46 1245.86 14
R104+ 1026.47 12 O 201.04 1026.91 11
R105+ 1391.59 16 O 179.46 1361.39 15
R106+ 1261.06 14 O 179.95 1264.50 13
R107+ 1127.84 12 195.12 1108.11 11
R108+ 990.62 10 205.77 994.68 10
R109+ 1197.33 12 193.51 1168.91 13
R110+ 1125.04 13 O 182.92 1108.22 12
R111+ 1090.52 12 195.66 1080.84 12
R112* 982.91 11 193.94 992.22 10
R201 1260.58 6 O 766.38 1197.09 7
R202 1097.58 6 O 837.05 1092.22 6
R203 962.40 6 O 730.76 983.06 5
R204 807.29 4 O 695.79 845.30 4
R205 1036.02 5 719.31 O 999.54 5
R206 941.09 4 O 752.71 955.94 4
R207 892.61 4 O 715.75 903.59 4
R208 805.50 3 688.20 769.96 3
R209 938.48 5 O 640.27 935.57 5
R210 981.40 5 O 793.38 988.34 6
R211 854.82 5 O 630.22 867.95 3
RC101 1682.02 17 O 192.15 1637.40 15
RC102 1532.44 15 O 196.52 1486.85 14
RC103 1356.21 12 210.34 1299.38 12
RC104 1190.46 11 210.5 1200.60 10
RC105 1591.59 16 O 198.98 1535.80 15
RC106 1441.08 14 O 198.36 1403.07 13
RC107 1291.70 13 O 197.03 1230.32 12
RC108 1156.92 11 212.29 1165.17 11
RC201 1345.36 6 O 748.61 1315.57 7
RC202 1174.23 6 O 716.13 1169.72 5
RC203 1038.97 5 O 777.83 1010.74 4
RC204 883.45 4 O 712.01 890.28 4
RC205 1237.81 7 O 721.89 1221.28 7
RC206 1147.15 6 O 702.32 1097.65 6
RC207 1061.85 5 O 672.37 1024.17 5
RC208 865.07 5 O 612.30 864.56 4
a
We list our best solution among the recombination methods (fixed and uniform)
b
O a solution exists where the number of routes is lower than the reported given a larger total distance
5 RESULTS
We implemented a hybrid SPEA2 approach that
yielded favorable simulation results reported in TA-
BLE 3 using Python scripting language where each
instance is ran on a computing node of the Dell C6220
server. Each node has an Intel Xeon CPU E5-2650,
64 bit architecture dual socket, 8 core’s each. We re-
port in the aforementioned table for each benchmark
the solution with the lowest total distance belonging
to one of the 36 Pareto fronts (since 36 runs), know-
ing that in many cases there exists a lower number of
routes corresponding to a higher total distance value
than the reported one. Time wise, running an instance
took roughly one day. Our main goal is to optimize
for three objectives rather than the total distance and
number of routes as a main target. To our best knowl-
edge, we are not aware of any study of instances with
these three objectives (specifically the average time
per route objective), therefore the results cannot be
exactly compared.
Nonetheless, to have a slightly meaningful ref-
erence to compare our obtained results with, we
matched our results with the two objective based
CVRPTW problems. In fact, if we compare our so-
lution with the absolute best reported results for two
objectives in literature (Bychkov and Batsyn, 2018)
and (Hsu and Chiang, 2012) we will obtain either op-
timal or sub optimal solutions. But for more practical
matter we compared our results to the bee colony op-
timisation (BCO) algorithm introduced by (Jawarneh
and Abdullah, 2015) where we identified a noticeable
improvement in 43 % of the cases as in TABLE 3.
The overall performance of our solution is good
since with few configurations we were able to get
good results for all benchmarks. In general, the con-
figuration of parameters in TABLE 2 (which is more
exploitative) gave better solutions than the TABLE 1
(which is more exploratory) if the best reported num-
ber of routes is relatively small (below 9 routes). On
the other hand, the first configuration gave mainly bet-
ter results than the second configuration if the best re-
ported number of routes is large. Some exceptions
were observed where configuration 2 gave better re-
sults for given benchmarks of type R1.
While executing all the simulations, we clearly no-
ticed that the second configuration is faster in con-
verging to a desired solution than the first one.
Benchmarks C1, R1 and RC1 have a relatively short
scheduling horizon and permit only a few customers
per route (around 5 to 10) as in Fig 7. On the contrary,
the benchmarks R2, C2 and RC2 have a long schedul-
ing horizon permitting many customers (sometimes
more than 30) to be visited by the same vehicle as in
Fig 8. This is in complete match with the literature
(Minocha et al., 2011).
Fig. 9, Fig. 10, Fig. 11 and Fig. 12 show
the variance analysis of two benchmarks namely
Solomon 100 R108 and RC201 with fixed and uni-
form recombination operator. We picked two bench-
marks belonging to two different families of bench-
marks. The box plot depicts the total distances over
18 instances. The experiment is repeated 36 times
(2x18 times) for each benchmark. The overall dis-
tribution of the total distance data and its skewness
over the instances are fairly close, which indicate that
the experiment is repeatable. Also, we can notice that
the R108 benchmark is slightly less repeatable than
the R201 benchmark. Moreover, no major difference
ECTA 2021 - 13th International Conference on Evolutionary Computation Theory and Applications
102

RC102 Sample Solution
Total Distance : 1532.44
Average Time Per Route : 196.52
Route 1 (Time= 231.32) : 0-92-50-27-29-31-34-93-94-80-0
Route 2 (Time= 219.50) : 0-83-19-23-18-48-21-25-24-0
Route 3 (Time= 237.41) : 0-39-36-40-38-41-43-35-37-72-0
Route 4 (Time= 226.72) : 0-98-73-79-7-46-4-2-100-70-0
Route 5 (Time= 235.49) : 0-33-26-28-30-32-89-0
Route 6 (Time= 228.24) : 0-65-52-99-57-86-74-77-0
Route 7 (Time= 167.06) : 0-64-22-49-20-0
Route 8 (Time= 100.24) : 0-90-0
Route 9 (Time= 133.83) : 0-42-44-61-81-0
Route 10 (Time= 175.13) : 0-85-63-76-51-84-56-66-0
Route 11 (Time= 218.26) : 0-69-88-53-78-17-13-0
Route 12 (Time= 180.00) : 0-1-3-45-5-8-6-55-68-0
Route 13 (Time= 191.93) : 0-12-14-47-16-15-9-10-60-0
Route 14 (Time= 222.19) : 0-82-11-87-59-97-75-58-0
Route 15 (Time= 180.52) : 0-91-95-62-67-71-54-96-0
Figure 7: RC102 Typical Solution.
RC202 Sample Solution
Total Distance : 1174.23
Average Time Per Route : 716.13
Route 1 (Time= 894.16) : 0-91-95-85-63-33-34-31-29-27-26-28-30-32-89-24-25-77-58-
52-0
Route 2 (Time= 929.12) : 0-69-98-88-53-99-57-86-87-9-10-59-97-75-74-13-17-60-100-
70-96-93-94-80-0
Route 3 (Time= 775.57) : 0-82-14-47-16-15-11-12-78-73-79-7-6-8-46-4-43-35-37-0
Route 4 (Time= 610.80) : 0-65-83-64-19-23-21-48-18-76-51-84-49-22-20-56-66-0
Route 5 (Time= 670.14) : 0-2-45-5-3-1-42-39-36-44-40-38-41-72-54-68-55-0
Route 6 (Time= 417.00) : 0-92-62-50-67-71-81-61-90-0
Figure 8: RC202 Typical Solution.
Figure 9: Variance analysis for Solomon 100 R108 with a
uniform recombination operator.
in the distribution and skewness is noticed between
fixed and uniform recombination options.
For illustration purposes, we select the Pareto
front (one out of the 36 instances) containing the low-
est total distance point for the benchmark C201 (size
100). A typical Pareto front surface (with 3 objec-
tives) is shown in Fig. 13, where we apply a trian-
gulation to the Pareto points and plot it as a trian-
gular surface. Here in this example, the number of
routes varies between 3 and 19, the total distance be-
tween 591.56 and 3840, and the average time between
1759.43 and 3197.19. The standard deviation for to-
tal distance is 888.18, for the number of routes it is
4.06 and for the average time per route it is 281.64. In
general, we observe a positive correlation between the
number of routes and the total distance and an inverse
correlation between the number of routes and average
Figure 10: Variance analysis for Solomon 100 R108 with a
fixed recombination operator.
Figure 11: Variance analysis for Solomon 100 R201 with a
uniform recombination operator.
time. The hypervolume (HV) indicator is a measure
for comparing Pareto sets in term of the closeness and
the spread of the solutions with respect to the Pareto
front. For Fig. 13, a good value of HV = 0.85 is ob-
tained given a reference point r=1.3 (30% larger than
the nadir point) (Ishibuchi et al., 2018).
Lastly, the visualization of the obtained solutions
is very helpful in presenting the final results. Fig. 14,
Fig. 15, and Fig. 16 are sample solution depictions
of benchmark or more precisely the topological maps
(with size 100). More explicitly, C104 has a total
distance of 824.78, a number of routes equals to 10,
and an average time of 995.40. In the comparison of
Figure 12: Variance analysis for Solomon 100 R201 with a
fixed recombination operator.
A Strength Pareto Evolutionary Algorithm for Solving the Capacitated Vehicle Routing Problem with Time Windows
103
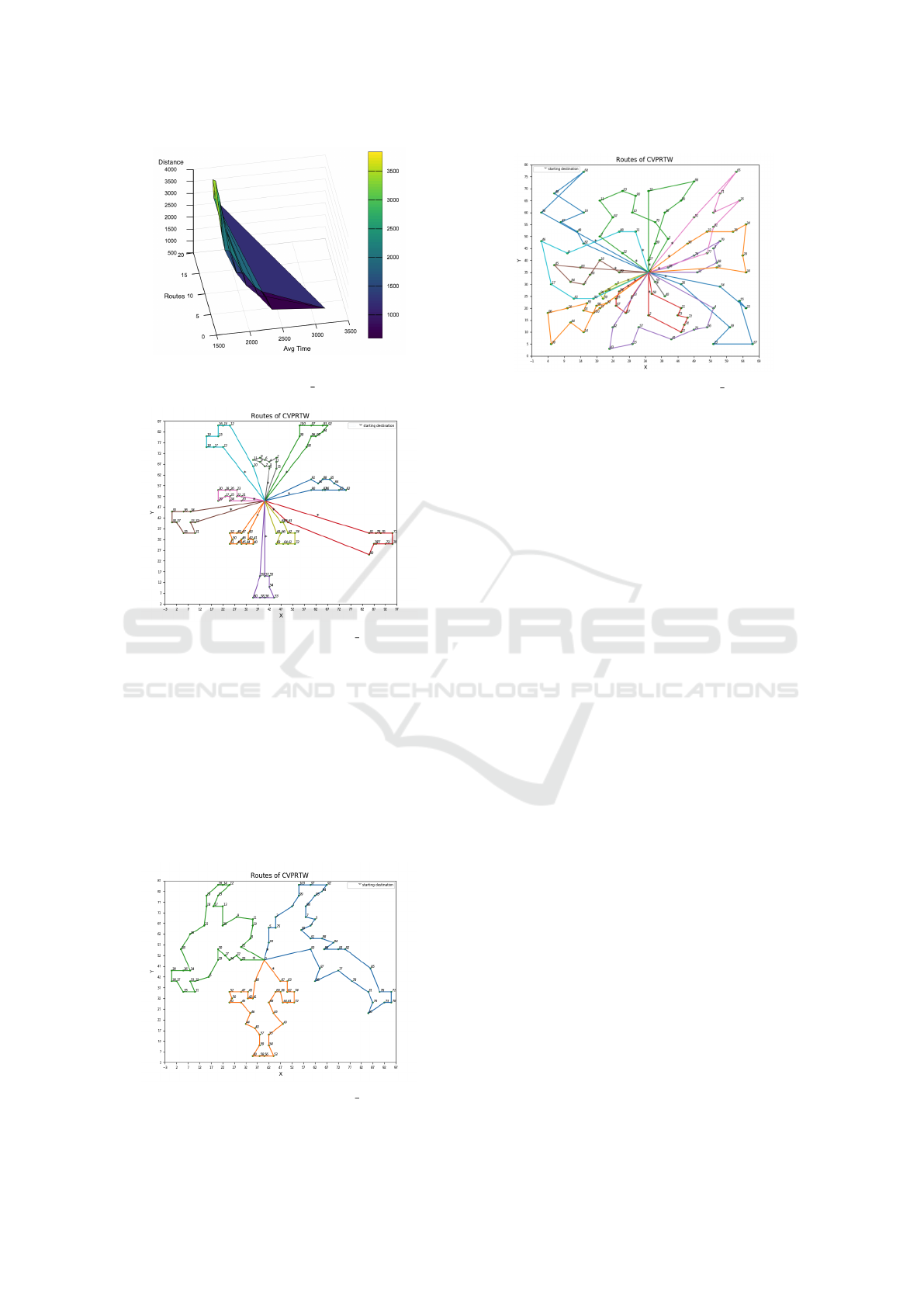
Figure 13: A visual representation sample of the Pareto
front surface obtained for Solomon 100 C201.
Figure 14: Network topology for Solomon 100 C104: dis-
tance = 824.78, routes = 10, time = 995.40.
these 3 benchmarks, C104 is situated in the middle in
terms of total distance, number of routes and average
time. C201 has the shortest total distance of 591.56,
a number of routes equals to 3, and average time of
3197.19. Clearly, in C201 we can see the reduced
number of routes and the short distance they cover
since the nodes on the routes are juxtaposed. Whereas
R103 has the highest total distance of 1240.08 which
is justifiable since the number of routes is elevated
and equals to 15 and it covers higher distance between
Figure 15: Network topology for Solomon 100 C201: dis-
tance = 591.56, routes = 3, time = 3197.19.
Figure 16: Network topology for Solomon 100 R103: dis-
tance = 1240.08, routes = 15, time = 196.46.
nodes on the routes. As for its average time it is equal
to 196.46. Concerning the average times, not much
can be inferred from the plots since the problem is
asymmetric but one can clearly reiterate the inverse
correlation between the number of routes and the av-
erage time.
6 CONCLUDING REMARKS
In this work, we propose a novel approach using a hy-
brid SPEA2 augmented with a hill climbing operator
to solve the CVRPTW problem optimizing for three
objectives: the total distance travelled, the number of
routes and the average time per route. The last objec-
tive is deemed necessary to reduce driver cost time
and balance the routes. Satisfactory results are re-
ported when running the widely studied Solomon’s 56
100-customer instances benchmark (a 43% improve-
ment when compared to a main stream bi-objective
BCO algorithm). In fact, considering three objec-
tives improves globally the best two standard objec-
tives since it guides the meta heuristic search toward
favorable search areas. We checked our proposed al-
gorithm for the bi-objectives case and the results do
not rebut this claim. On the other hand, the local
search is necessary to ensure quality results despite
the latency introduced. The complexity added to the
solution in order to improve quality of the solution is
in accordance with the paradox: quality results ver-
sus speed of convergence (Reimann et al., 2003). As
for the simplicity measure, the algorithm is not very
hard to configure across different type of classes for
this benchmark. Concerning the flexibility of the pro-
posed algorithm, future work should examine scaling
this algorithmic solution to handle very large bench-
marks or very deploying it on different variants of
VRP such as: the green version of the CVRPTW that
ECTA 2021 - 13th International Conference on Evolutionary Computation Theory and Applications
104

accounts for carbon emissions (Lin et al., 2014), or
VRP with soft timing constraints, which if violated
we must account for a penalty. Ambitious future work
can also account for traffic, i.e. higher cost routes in
city centers (Rizzoli et al., 2004) in what is known as
time dependent VRPTW. Another extension could be
to target split delivery vehicle routing problem with
time windows (SDVRPTW) where the delivery to a
customer can be split between any number of vehicles
resulting in considerable improvements in terms num-
ber of vehicles used and cost (Da Silva et al., 2014;
Feillet et al., 2006).
On the other hand, this work can be generalized to
address a different class of VRP altogether, namely
the VRP with backhauls (VRPB) (Toth and Vigo,
2001). Lastly, it is also interesting for future work
to add problem knowledge to the reproduction oper-
ators such as the one proposed in (Hsu and Chiang,
2012).
ACKNOWLEDGEMENTS
We thank dearly Dr. Janka Chlebikova and Dr. Mo-
hamad Bader-El-Den from the School of Computing
at University of Portsmouth for their valuable support.
Numerical computations were done on the Sciama
High Performance Compute (HPC) cluster which is
supported by the ICG, SEPNet and the University of
Portsmouth.
REFERENCES
Bychkov, I. and Batsyn, M. (2018). A hybrid approach
for the capacitated vehicle routing problem with time
windows. In OPTA-SCL. CEUR Workshop Proceed-
ings.
Chiang, T.-C. and Hsu, W.-H. (2014). A knowledge-based
evolutionary algorithm for the multiobjective vehicle
routing problem with time windows. Computers &
Operations Research, 45:25–37.
Czech, Z. J. and Czarnas, P. (2002). Parallel simulated
annealing for the vehicle routing problem with time
windows. In Proceedings 10th Euromicro workshop
on parallel, distributed and network-based process-
ing, pages 376–383. IEEE.
Da Silva, M. D. M., Subramanian, A., and Ochi, L. S.
(2014). An iterated local search heuristic for the split
delivery vehicle routing problem. In ROADEF-15
`
eme
congr
`
es annuel de la Soci
´
et
´
e franc¸aise de recherche
op
´
erationnelle et d’aide
`
a la d
´
ecision.
Dash, M. and Anekal, B. I. (2014). Variables reduction in
vehicle routing problems. SPC ERA IJBM, 2(6).
Dixit, A., Mishra, A., and Shukla, A. (2019). Vehicle rout-
ing problem with time windows using meta-heuristic
algorithms: a survey. In Harmony search and na-
ture inspired optimization algorithms, pages 539–546.
Springer.
Feillet, D., Dejax, P., Gendreau, M., and Gueguen, C.
(2006). Vehicle routing with time windows and split
deliveries. Technical Paper, 851.
Garcia-Najera, A. and Bullinaria, J. A. (2011). An im-
proved multi-objective evolutionary algorithm for the
vehicle routing problem with time windows. Comput-
ers & Operations Research, 38(1):287–300.
Hsu, W.-H. and Chiang, T.-C. (2012). A multiobjective evo-
lutionary algorithm with enhanced reproduction oper-
ators for the vehicle routing problem with time win-
dows. In 2012 IEEE Congress on Evolutionary Com-
putation, pages 1–8. IEEE.
Ishibuchi, H., Imada, R., Setoguchi, Y., and Nojima, Y.
(2018). How to specify a reference point in hyper-
volume calculation for fair performance comparison.
Evolutionary computation, 26(3):411–440.
Jawarneh, S. and Abdullah, S. (2015). Sequential insertion
heuristic with adaptive bee colony optimisation algo-
rithm for vehicle routing problem with time windows.
PloS one, 10(7):e0130224.
King, R. A., Deb, K., and Rughooputh, H. (2010). Compar-
ison of nsga-ii and spea2 on the multiobjective envi-
ronmental/economic dispatch problem. University of
Mauritius Research Journal, 16(1):485–511.
Li, W., Dai, H., and Zhang, D. (2015). The relationship
between maximum completion time and total comple-
tion time in flowshop production. Procedia Manufac-
turing, 1:146–156.
Lin, C., Choy, K. L., Ho, G. T., Chung, S. H., and Lam, H.
(2014). Survey of green vehicle routing problem: past
and future trends. Expert systems with applications,
41(4):1118–1138.
Luke, S. (2013). Essentials of metaheuristics. lulu, 2013.
Metaheuristics in large-scale global continues op-
timization: A survey, available at: http://cs. gmu.
edu/ sean/book/metaheuristics.
Marrouche, W., Farah, R., and Harmanani, H. M. (2018).
A strength pareto evolutionary algorithm for optimiz-
ing system-on-chip test schedules. International Jour-
nal of Computational Intelligence and Applications,
17(02):1850010.
Meryem, B. and Abdelmadjid, B. (2015). Resolving a ve-
hicle routing problem with heterogeneous fleet, mixed
backhauls and time windows using cuckoo behaviour
approach. International Journal of Operational Re-
search, 24(2):132–144.
Messaoud, E., El Idrissi, A. E. B., and Alaoui, A. E. (2018).
The green dynamic vehicle routing problem in sus-
tainable transport. In 2018 4th International Con-
ference on Logistics Operations Management (GOL),
pages 1–6. IEEE.
Minocha, B., Tripathi, S., and Mohan, C. (2011). Solving
vehicle routing and scheduling problems using hybrid
genetic algorithm. In 2011 3rd international confer-
ence on electronics computer technology, volume 2,
pages 189–193. Ieee.
A Strength Pareto Evolutionary Algorithm for Solving the Capacitated Vehicle Routing Problem with Time Windows
105

Reimann, M., Doerner, K., and Hartl, R. F. (2003). Ana-
lyzing a unified ant system for the vrp and some of its
variants. In Workshops on Applications of Evolution-
ary Computation, pages 300–310. Springer.
Rizzoli, A. E., Oliverio, F., Montemanni, R., and Gam-
bardella, L. M. (2004). Ant colony optimisation for
vehicle routing problems: from theory to applications.
Galleria Rassegna Bimestrale Di Cultura, 9(1):1–50.
Taha, A., Hachimi, M., and Moudden, A. (2017). A dis-
crete bat algorithm for the vehicle routing problem
with time windows. In 2017 International Colloquium
on Logistics and Supply Chain Management (LOGIS-
TIQUA), pages 65–70. IEEE.
Tan, K. C., Chew, Y. H., and Lee, L. H. (2006). A hybrid
multiobjective evolutionary algorithm for solving ve-
hicle routing problem with time windows. Computa-
tional Optimization and Applications, 34(1):115–151.
Toth, P. and Vigo, D. (2001). The vehicle routing problem:
Society for industrial and applied mathematics. Siam
Monographs on Discrete Mathematics and Applica-
tions.
Udin, K., Gui, R., and Rahmawan, A. (2017). Green ve-
hicle routing problem with heterogeneous fleet and
time windows. In Proceedings of the 6th International
Conference on Software and Computer Applications,
pages 223–227.
Vidal, T., Crainic, T. G., Gendreau, M., Lahrichi, N., and
Rei, W. (2012). A hybrid genetic algorithm for multi-
depot and periodic vehicle routing problems. Opera-
tions Research, 60(3):611–624.
Xiao, L., Hajjam-El-Hassani, A., and Dridi, M. (2017). An
application of extended cuckoo search to vehicle rout-
ing problem. In 2017 International Colloquium on
Logistics and Supply Chain Management (LOGISTI-
QUA), pages 31–35. IEEE.
Yasin, M. and Vincent, F. Y. (2013). A simulated anneal-
ing heuristic for the green vehicle routing problem.
In Proceedings of the institute of industrial engineers
Asian conference 2013, pages 1261–1269. Springer.
Zitzler, E. (2001). Spea2: Improving the performance of the
strength pareto evolutionary algorithm. Computer En-
gineering and Communication Networks Lab (TIK).
Zitzler, E., Laumanns, M., and Bleuler, S. (2004). A tutorial
on evolutionary multiobjective optimization. Meta-
heuristics for multiobjective optimisation, pages 3–37.
ECTA 2021 - 13th International Conference on Evolutionary Computation Theory and Applications
106
