
Explainability and Continuous Learning with Capsule Networks
Janis Mohr
1
, Basil Tousside
1
, Marco Schmidt
2
and J
¨
org Frochte
1
1
Interdisciplinary Institute for Applied Artificial Intelligence and Data Science Ruhr,
Bochum University of Applied Science, 42579 Heiligenhaus, Germany
2
Center Robotics (CERI), University of Applied Sciences Wuerzburg-Schweinfurt, 97421 Schweinfurt, Germany
marco.schmidt@fhws.de
Keywords:
Explainability, Continuous Learning, Capsule Networks, Data Privacy, Image Recognition.
Abstract:
Capsule networks are an emerging technique for image recognition and classification tasks with innovative
approaches inspired by the human visual cortex. State of the art is that capsule networks achieve good ac-
curacy for future image recognition tasks and are a promising approach for hierarchical data sets. In this
work, it is shown that capsule networks can generate image descriptions representing detected objects in im-
ages. This visualisation in combination with reconstructed images delivers strong and easily understandable
explainability regarding the decision-making process of capsule networks and leading towards trustworthy AI.
Furthermore it is shown that capsule networks can be used for continuous learning utilising already learned
basic geometric shapes to learn more complex objects. As shown by our experiments, our approach allows for
distinct explainability making it possible to use capsule networks where explainability is required.
1 INTRODUCTION
Convolutional neural networks (CNNs) are very suc-
cessful in recognition and classification in computer
vision tasks. However, adopting machine learning
today is facing two major challenges. On the one
side, there is an ever-increasing demand for privacy-
preserving AI. On the other side, there is a need for
constantly evolving neural networks which can learn
continually. Conventional ML approaches based on
centralised data collection cannot meet these chal-
lenges. How to solve the problem of data isolation
while complying with the privacy-protection laws and
regulations is a major challenge for ML researchers
and practitioners.
On the legal front, lawmakers and regulatory bod-
ies are coming up with new laws ruling how data shall
be managed and used. One prominent example is
the adoption of the General Data Protection Regula-
tion (GDPR) by the European Union in 2018 which
makes high demands on data protection and privacy
including the requirement to delete data after a given
time. Some countries decided in a follow-up to en-
act laws that give the right to require an explanation
for every algorithmic decision (Malgieri, 2019). The
ethics guidelines for trustworthy AI of the EU assess
explainability as one of the key requirements for AI.
In the United States, the California Consumer Pri-
vacy Act will be enacted in 2020. China’s Cyber
Security Law which came into effect in 2017, im-
posed strict controls on data collection and transac-
tions. The sensitivity nature of certain data (for exam-
ple, financial transactions and medical records) pro-
hibits free data circulation. In the context of explain-
ability and transparency it is important to avoid black
boxes in decision-making processes. Therefore an up-
ward trend for explainability in neural networks ex-
ists, which makes it necessary to come up with novel
ideas and special architectures for neural networks
like capsule networks.
Capsule networks aspire to become an all-round
solution to challenges in computer vision while abid-
ing by the restraints of laws and challenging classic
CNNs in terms of accuracy. The process of trans-
ferring information between layers is called routing.
A pooling operation is conducted after the convolu-
tion operation of each layer is completed. Pooling
can be seen as a special form of routing in neural net-
works. Most information about the image gets lost
during pooling including vital information like orien-
tation and position of an object. Processing an im-
age with several facial features in it will make a CNN
guess that the image shows a face (picasso-problem).
It does not integrate the relative position of specific
264
Mohr, J., Tousside, B., Schmidt, M. and Frochte, J.
Explainability and Continuous Learning with Capsule Networks.
DOI: 10.5220/0010681300003064
In Proceedings of the 13th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2021) - Volume 1: KDIR, pages 264-273
ISBN: 978-989-758-533-3; ISSN: 2184-3228
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

features to one another into its decision-making pro-
cess. (Sabour et al., 2017) proposed a novel CNN
(capsule network) with a dynamic routing algorithm
as a solution for this problem.
Capsule networks arise from the idea of inverse
computer graphics and models of the human visual
cortex. They can detect if facial features are just ran-
domly spread through an image or if they form a face.
A variety of attributes can be recognised by a capsule
including pose (position, size, direction), deforma-
tion, hue, texture, and so on. This makes capsule net-
works especially effective on hierarchical data. The
capsules contain different tiers of image information.
The higher the level of a capsule the more information
it contains. Different tiers of capsules are connected
through a routing algorithm.
The image information contained in a capsule can
be presented to a user (even non experts) to gain ex-
plainability. Furthermore it is possible to generate im-
age descriptions (captions) with a stage-wise trained
capsule network based on the learned objects. This
can be combined with a network that has learned to
generate images purely from the image information
of a capsule to achieve a strong set of easy to under-
stand visual clues about what the network has learned
and how it makes a decision.
We studied the performance of capsule networks
for MNIST, Fashion-MNIST, Omniglot and a newly
proposed classification task. The objective of this
work is to visualise the decision-making process util-
ising the image information contained in capsules and
effectively gain explainability. We also enhanced cap-
sule networks in a way that they are capable of gener-
ating descriptions for images based on what the cap-
sules have learned. Additionally, it is shown that
it is possible to use capsule networks for resource-
effective continuous learning exploiting the possibil-
ity to reconstruct images which also abides by laws of
data privacy.
Overall, the main contributions of our work are
twofold:
• A set of enhancements is developed which of-
fer the opportunity to generate image descriptions
and preserve vital image information with capsule
networks without affecting the accuracy. Both can
be used to gain explainability regarding the rea-
soning behind the predictions of capsule networks
used in computer vision tasks.
• A framework is developed that utilises the abil-
ity of capsule networks to generate images and
therefore does not need the original training data
to achieve competitive accuracy.
1.1 Related Work
Initial work related to a mathematical representation
of the human visual cortex led to (Geoffrey E. Hinton,
1981a) identifying that some of the processes in the
human brain related to vision have similarities to
the concept of inverse computer graphics. In inverse
computer graphics an image is analysed and the
task is to locate entities in this image in such a way
that complex objects are broken down into several
simple geometric shapes like squares and triangles.
(Geoffrey E. Hinton, 1981b)
The idea of inverse computer graphics led to
the insight that the latest CNNs are not working
in this way and are therefore not close to human
vision (Tielenman, 2014). (Geoffrey E. Hinton et al.,
2011) showed a first approach to develop neural
networks which utilise inverse computer graphics.
Further development lead to a fully working capsule
network with dynamic routing in which neurons are
grouped into capsules and vectors are shared between
layers (Sabour et al., 2017). (Hinton et al., 2018)
extended the approach to capsule networks with the
Expectation-Maximisation algorithm and matrices.
Several teams study the performance and pos-
sibilities of capsule networks. (Rajasegaran et al.,
2019) developed a deeper network with capsules
achieving better accuracies on key-benchmark
datasets like Fashion-MNIST and CIFAR-10. The
optimal parameter set and architecture to achieve
an optimal test error on CIFAR-10 was analysed
by (Xi et al., 2017). (Renkens and van hamme,
2018) show that capsule networks can outperform
baseline models for understanding spoken language
in command-and-control applications. Capsule
networks have been generalised to work with 3D
inputs for action detection in videos (Duarte et al.,
2018). Several papers work out that capsule networks
surpass baseline CNNs in image classification tasks
across several domains (Afshar et al., 2018; Mobiny
and van Nguyen, 2018; Iesmantas and Alzbutas,
2018; Kumar, 2018; Gagana et al., 2018; Abeysinghe
et al., 2021). All these works proof that capsule
networks are a valuable and promising technique
which is used in a vast array of domains. This makes
it indispensable to research continuous learning and
explainability methods.
(Zhang et al., 2019) proposes to add interpretable
convolutional filters to CNNs which encode a specific
part of an object which can help to explain the
logic of a CNN. These filters are close to the image
Explainability and Continuous Learning with Capsule Networks
265
information contained in a capsule though they have
to be added to the network and need to be specifically
trained on specific parts of an object while the cap-
sules simply learn and contain information of objects
in an image. (Simonyan et al., 2013; Mundhenk
et al., 2019) propose that saliency maps (or heatmaps)
can be used to highlight areas in an image that a
convolutional neural network has looked at to make
a decision. The proposed framework to use capsule
networks to generate image descriptions is a more
intuitive way to explain the decision of a network.
(Alqaraawi et al., 2020) reports that users get some
insight into specific features the CNN uses for its
decision from saliency maps but could not anticipate
the networks decision for new images.
Generative Adversarial Networks (GAN) as pro-
posed by (Goodfellow et al., 2014) have the ability to
generate images that could be used to generate images
for continuous learning. But they are not a classifica-
tor themselves contrary to capsule networks.
Continuous Learning is an ongoing and heavily
discussed topic in machine learning. CNNs tend to
catastrophic forgetting and it is still unclear how to
selectively forget. In the recent years several different
approaches (Kirkpatrick et al., 2017; K
¨
ading et al.,
2017) to overcome catastrophic forgetting have been
researched.
2 CAPSULE NETWORKS
Capsule networks arise from the basic idea to create a
neural network capable of inverse computer graphics.
In other words the network should be able to decon-
struct a scene into co-related parts. Thus, the archi-
tecture of a neural network needs to be changed to
reflect the idea of an entity. Every entity gets its own
part of the network, encapsulating a number of neu-
rons. These groups of neurons are called capsules.
2.1 Capsules
A layer of neurons can be divided into many capsules.
These capsules contain the neurons. Therefore, a cap-
sule is a wrapper around a dedicated group of neu-
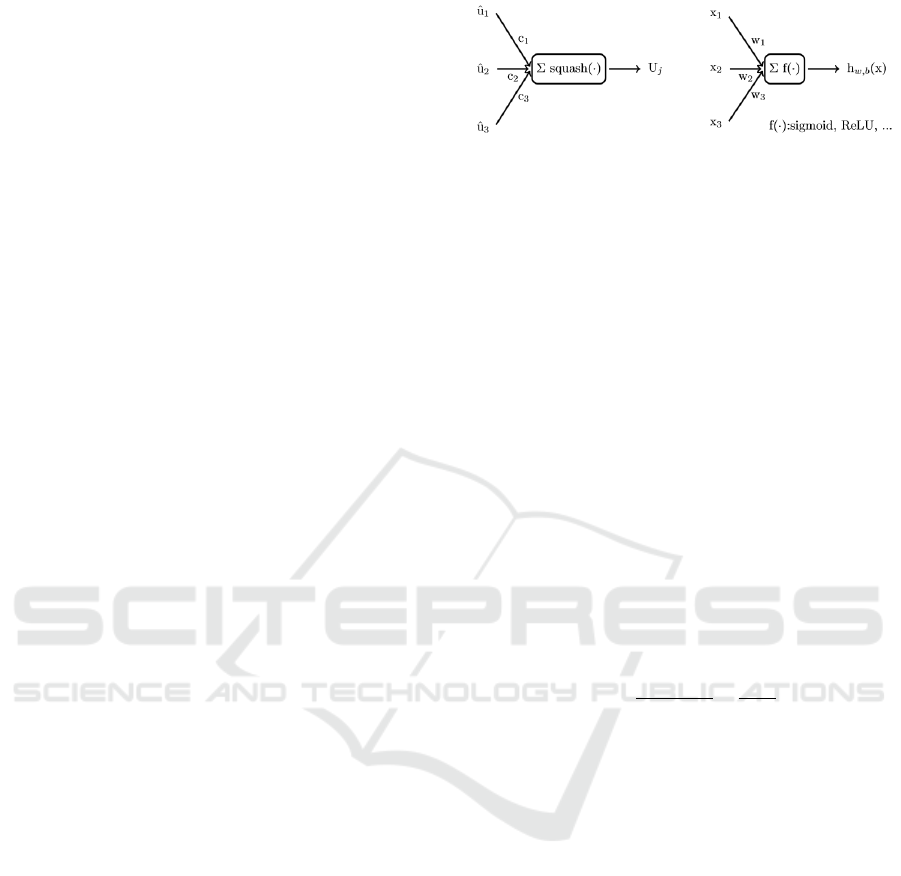
rons. Fig. 1 shows a simplified comparison between
a capsule and a neuron.
Neurons handle scalar values as input and out-
put. Capsules however encase a group of neurons
and compute vectors as in- and output. The usage
of vectors enables capsule networks to save image
information like location, colour, etc. The length of
Figure 1: On the left-hand side a capsule can be seen which
has in-going vectors and uses the squashing function to get
an output vector. On the right-hand side a neuron in the way
it is currently used in CNNs can be seen which has an input
of scalar values and an activation function (sigmoid, ReLU,
...) to form an output.
the vector represents the probability for feature exis-
tence, while not losing the important image informa-
tion. A n-dimensional capsule can learn n parameters
and outputs a n-dimensional vector. For the output
vector to model a probability, its length has to stay
between 0 and 1. A novel non-linear squashing func-
tion (see Equation 1) was introduced, where v
j
is the
vector output of capsule j and s
j
is its total input.
(Sabour et al., 2017) A capsule network should have a
last layer with as many capsules as there are different
classes in the dataset. Figure 8 in section 4.2 shows
a capsule network. The output vector of every cap-
sule represents the image information of every class
and the probability that it is part of the input image.
The various dimensions of the output vectors repre-
sent different attributes for every class.
v
j
=
||s
j
||
2
1 + ||s
j
||
2
×
s
j
||s
j
||
(1)
2.2 Routing-by-Agreement
In the scope of inverse graphics a way to connect e.
g. a detected eye to a possible face and not to a car
is needed. This is done by a novel dynamic routing
technique called routing-by-agreement. With routing-
by-agreement the output of a capsule is directed to
a higher-level capsule where it agrees with other in-
puts. For example several detected facial features like
a mouth and a nose should be routed to a capsule
that detects faces. Instead, a detected mouth and tire
should not be directed to the same high-level capsule
and therefore not agree with each other. It is very
unlikely for agreements to lie close to another in a
high dimensional space (coincidence filtering). Thus
an accumulation can not be a coincidence and there-
for strengthens the decision of the network (Sabour
et al., 2017).
KDIR 2021 - 13th International Conference on Knowledge Discovery and Information Retrieval
266

3 EXPLAINABILITY THROUGH
IMAGE DESCRIPTIONS AND
CONTINUOUS LEARNING
WITH IMAGE
RECONSTRUCTION
The capsules contain image information. These infor-
mation can be interpreted as various attributes of each
entity. For example shape, thickness, rotation and so
on. Every capsule delivers a vector. The length of the
vector is the probability that the specific entity can be
seen at a specific part of the image. The orientation
of the vector is the information contained in it. The
more dimensions a capsule has the more dimensions
the vector has and therefore more information is con-
tained. The output vector of a capsule can be visu-
alised. These vectors if placed on the original image
give information where the capsule network locates
an entity as can be seen simplified in Figure 2.
We will demonstrate that it is possible to train a
network to reconstruct the original images out of the
output vectors of the capsules in the last layer. This
generative capability can be used to reconstruct data
while only requiring vectors as input. These vectors
can efficiently be generated if the capsule network and
its dimensions and weights are known. The output
of the capsules is fed into a decoder network during
training consisting of 3 fully connected layers that re-
construct images. Aforementioned reconstruction can
be utilised for example to generate data in cases where
a task requires continuous learning without the orig-
inal training data. The need to retrain without orig-
inal training data arises in cases where it is impor-
tant to abide by the laws of data privacy (for example
GDPR).
Figure 3 shows how the reconstructed images
change when only one dimension of the output vector
of the final layer of capsules is perturbed. As a con-
sequence it is possible to define which attribute every
dimension represents and therefore allows to under-
stand how a capsule network makes its decisions. The
figure was generated with a capsule network trained
on the MNIST dataset (see section 4.1) An output vec-
tor of the capsule of the last layer which represents the
number 8 was fed into the generative network to re-
construct images. A mutated version of this vector
was fed several times into the generative network and
the resulting images where saved. At every new it-
eration one entry in the vector was perturbed slightly
which resulted in images as shown in Figure 3. The
four selected dimensions represent the circle diame-
ter of the two circles that an eight consists out of, the
rotation of the number, the separation of the two cir-
Figure 2: The figure shows an image of a simplified house
from the dataset described in section 4.2. It has an overlay
of vector arrows. These arrows represent vectors from cap-
sules in a layer of a capsule network trained on the boat
and house dataset. The blue arrows represent a capsule
looking for triangles and the red arrows capsules looking
for rectangles. The aforementioned technique is an easy-to-
understand way to visualise where the network finds which
basic geometric shape.
cles and the slant respectively. These images show the
wide variety of different hand-writings present in the
MNIST dataset.
Humans and animals have the ability to acquire
and transfer knowledge throughout their life. This is
called lifelong learning. Continuous learning is an
adaption of this mechanic (K
¨
ading et al., 2017). In
this paper, continuous learning is considered to be a
technique which allows a complete model to be able
to predict a new dataset with the same or other fea-
tures. Therefore, it must be retrained or expanded.
An algorithm that supports the time efficient retrain-
ing was developed. It abides by the laws of GDPR re-
garding data privacy as it does not require to save any
of the data originally used to train the network. The
aforementioned generative network is used to gener-
ate images that are added to a new dataset to repre-
sent the original training data and avoid catastrophic
forgetting.
A capsule network CN is trained on a dataset X
1
.
This model reaches a certain quality of its predictions
until the training is stopped. A second dataset X
2
is
available after training. For example this could be
data that was gathered after the training on the origi-
nal data was finished.
In scenarios where it is for example due to data
protection laws not possible to use the original data
anymore capsule networks can be used. Their abil-
Explainability and Continuous Learning with Capsule Networks
267
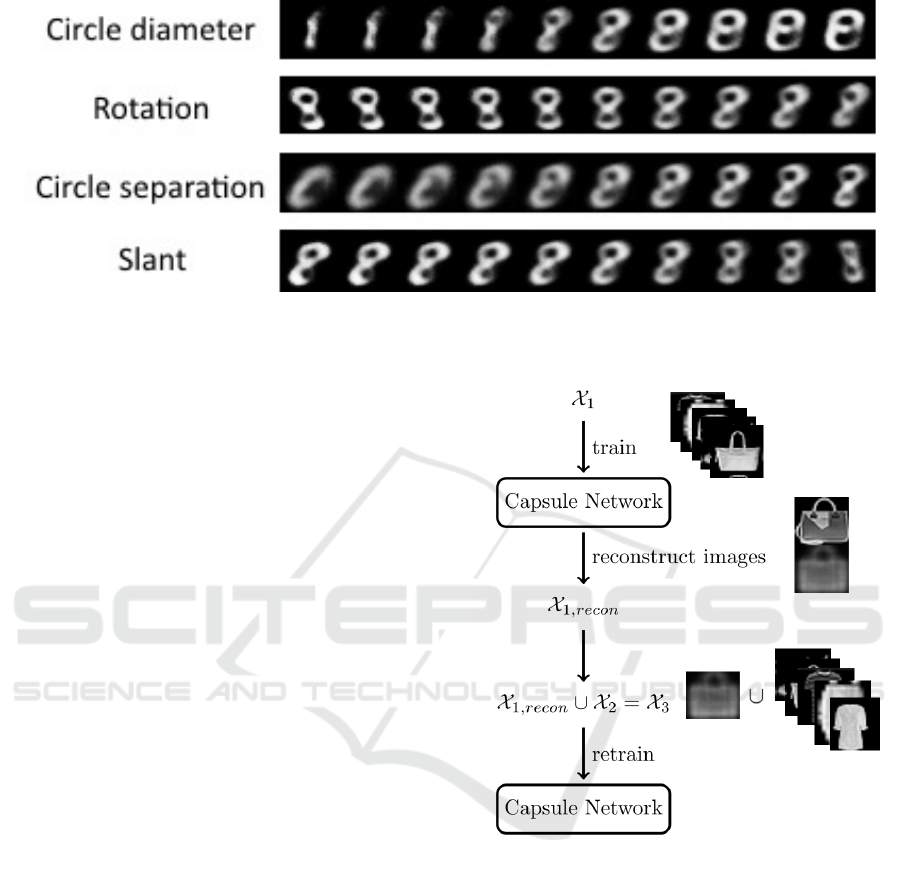
Figure 3: Examples of reconstructed images where only one dimension is perturbed. It can be seen that the changed dimen-
sions can be interpreted as the diameter of the two circles that form an eight, the rotation of the number, the separation of the
two circles and the slant of the whole number.
ity to reconstruct images comes in handy and is use-
ful to overcome catastrophic forgetting which would
otherwise cause a reduction in the accuracy for the
initial trained classes. The part of the network that
is responsible for the reconstruction is fed with sev-
eral randomly generated vectors that have the same
dimensions as the output vectors of the last layer of
capsules. That will make the network generate im-
ages which are reconstructed and share their features
with the original dataset X
1
. The new dataset is called
X
1,recon
. The capsule network is already prepared for
continuous learning as it already has spare output cap-
sules. If the number of final outputs is unknown it is
advisable to already add plenty of additional capsules
which are not used during initial training.
X
1,recon
can be combined with X
2
to form a new
dataset X
3
. The capsule network can now be retrained
on X
3
without catastrophic forgetting. It is advisable
to generate at least ten percent of the size of the origi-
nal dataset. In case that the size of the original dataset
is unknown it is indicated to reconstruct as many im-
ages as the new dataset contains. If a new dataset X
4
exists and the network is to be retrained again then
the framework can be used again starting with recon-
structing images. See section 4.2 for experimental re-
sults of the proposed framework and figure 4 for a
sketch of the framework.
4 EXPERIMENTS
In the following section three different experiments
are described. The experiments show how the pro-
posed framework can be used effectively for contin-
uous learning while paying regard to the needs of
data protection. Furthermore, the aptitude to increase
explainability through image descriptions is demon-
Figure 4: Diagrammatic overview of the proposed frame-
work for continuous learning with capsule networks. A
capsule network is trained on a dataset X
1
. The network is
then used to generate images and combine these with a new
dataset X
2
which was not available during the first training.
Then the capsule network is retrained on the union of the
generated images and X
2
to overcome catastrophic forget-
ting.
strated. An academic implementation of capsule net-
works is used for the experiments. The reconstruc-
tion of complex real-life images and their use in mak-
ing users more confident in the classification of neu-
ral networks by increasing the level of transparency is
shown with Fashion-MNIST. The handwritten num-
bers of MNIST are used to demonstrate how capsule
networks can generate image descriptions based on
simple geometries. The continuous learning frame-
KDIR 2021 - 13th International Conference on Knowledge Discovery and Information Retrieval
268

work with support of reconstructed images is shown
with the proposed boat and house dataset and the on-
miglot dataset of written characters.
4.1 MNIST and Fashion-MNIST
Fashion-MNIST was introduced by (Xiao et al., 2017)
as an alternative for the popular MNIST dataset which
was introduced by (Y. LeCun et al., 1998). The im-
ages are of size 28 × 28 pixels and are greyscale.
Fashion-MNIST consists out of 70.000 images of
fashion items like trousers or shoes separated into
10 categories. The dataset is split into a training
set of 60.000 images and a test set of 10.000 im-
ages. It is freely available at https://github.com/
zalandoresearch/fashion-mnist. The capsule network
architecture used for MNIST and Fashion-MNIST
has 10 20-dimensional capsules in the last layer and
128 9 × 9 convolutional kernels with ReLu activation.
After training for 20 epochs with no preprocessing
(augmentation) of the images it achieves an accuracy
on Fashion-MNIST of 94.6% and 99.7% on MNIST.
This is an average accuracy of 20 cross-validations.
It can be seen that the achieved average accuracy
for MNIST is close to state-of-the-art approaches and
even better then some of them on Fashion-MNIST.
This shows that Capsule Networks are competitive
with these neural networks while also adding the ca-
pabilities of continuous learning and explainability. It
also indicates that no accuracy is lost through these
enhancements. The capsule network has 8.7 M pa-
rameters. Comparable CNNs have much more and up
to 40 M ((Hirata and Takahashi, 2020)) parameters
without a significant advantage in accuracy. Further-
more the other models are specifically tailored for the
MNIST and Fashion-MNIST datasets.
Figure 5 shows a number of original and recon-
structed images of the Fashion-MNIST dataset. It can
be seen that the main features are preserved after re-
construction. This allows a user to match original and
reconstructed images. A user could be shown a selec-
tion of reconstructed images and the user could guess
which classes the network has learned to distinguish
without any further information. Thus boosting the
confidence the user has in decisions of the capsule
network.
Furthermore it is possible to train a capsule net-
work in a stage-wise manner. At first the network is
trained with images of basic geometric shapes that
will be present in the target dataset. For MNIST
these shapes are vertical and horizontal lines, circles
and semicircles (This was used to generate the cap-
tions shown in Figure 6). After training on these ba-
sic shapes the weights of the layers are frozen and
Figure 5: A juxtaposition of original inputs sourced from
the Fashion-MNIST dataset and the reconstructed images
with the original image on top of the reconstructed one. All
reconstructions keep the main features of the piece of fash-
ion and even if mixed up it would be easy to match them.
Figure 6: Image descriptions generated by a capsule net-
work. The network was first trained on four basic geometric
shapes. vertical lines, horizontal lines, circles and semicir-
cles. Afterwards the network was trained on MNIST. The
route an image takes through the network can be tracked
and therefore it is possible to generate captions based on
the information which basic shapes the capsule network has
found.
the network is expanded with two additional capsule
layers. This network is then trained on the MNIST
dataset. The new capsule layers learn high-level and
abstract features of the images to classify them. This
time no generated images are used. It is not necessary
to achieve final predictions of these basic geometric
shapes. They are just trained to achieve meaningful
image descriptions. The network is used to predict
images from the MNIST dataset which show hand-
written numbers. The output of the network is the
classification of the image and the way through the
capsules the image has taken. According to the rout-
ing by agreement this allows to comprehend the basic
geometric shapes which the capsule network detects
in the image. An example can be seen in Figure 6.
Explainability and Continuous Learning with Capsule Networks
269
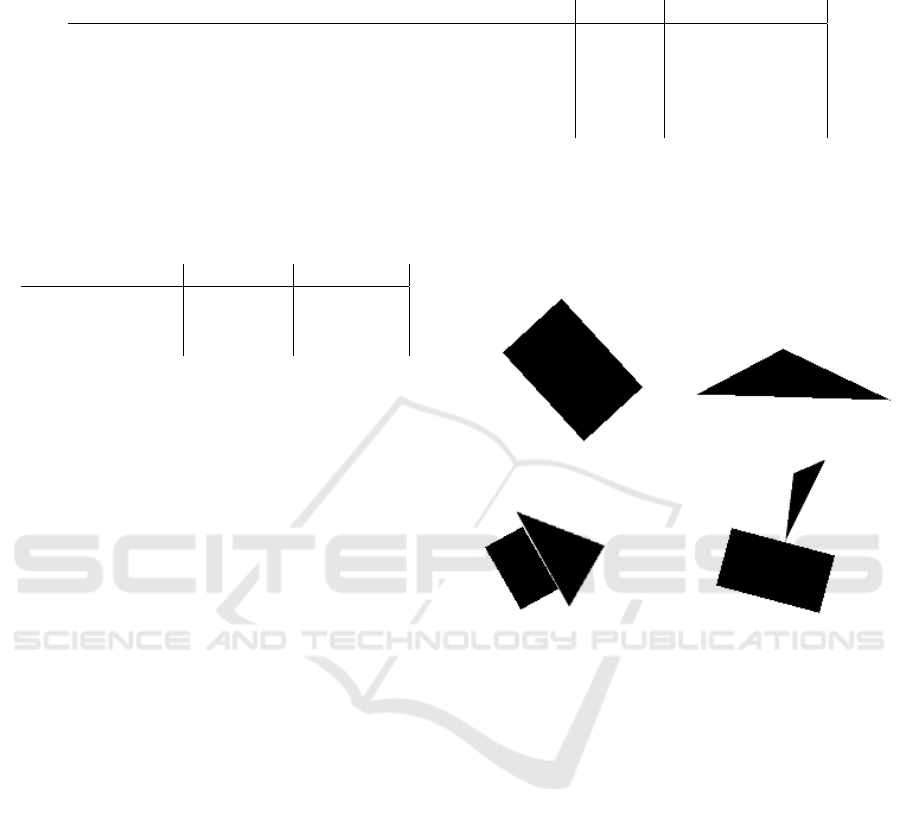
Table 1: Achieved accuracies on MNIST and Fashion-MNIST with the used capsule network compared to a variety of state-
of-the-art approaches.
Model MNIST Fashion-MNIST
Capsule Network (ours) 99.70% 94.60%
TextCaps (Jayasundara et al., 2019) 99.71% 93.71%
Branching & Merging CNN w/HFCs (Byerly et al., 2020) 99.76% 93.66%
EnsNet (Hirata and Takahashi, 2020) 99.84% 95.30%
VGG8B + LocalLearning + CO (Nøkland and Eidnes, 2019) 99.74% 95.47%
Table 2: Achieved accuracies on the single-head and multi-
head scenarios of split MNIST with the used capsule net-
work compared to a variety of state-of-the-art continuous
learning approaches.
Model multi-head single-head
Capsule Network 98.37% 93.52%
EWC 98.64% 20.01%
DGR 99.50% 90.79%
4.1.1 Results for Continuous Learning
MNIST becomes a substantially more difficult prob-
lem if it is split up into multiple tasks that must be
learned in sequence. Splitting MNIST up into sev-
eral parts is simply called split MNIST (Zenke et al.,
2017). Split MNIST is a popular benchmark for con-
tinual learning algorithms. It can be set up in two
different ways giving vastly different tasks. For both
options the dataset is split into 5 separate sequences.
Each containing the data for two digits; zero and one,
two and three and so on. The task incremental learn-
ing scenario (van de Ven and Tolias, 2019) or the
multi-headed setup (Farquhar and Gal, 2019) describe
a scenario in which only two digits need to be distin-
guished at a time. It is always clear that the network
only needs to output which reflect the two classes of
the current scenario. For example in the last step it
is only required to distinguish between the numbers
eight and nine. The class incremental learning prob-
lem or single-headed setup means that the network
must learn a 10-way classifier. But it still only gets
data referring to two different classes in every step.
This scenario is probably more realistic and much
more complicated.
Both setups are tested with capsule networks and
state-of-the-art continuous learning approaches. For
capsule networks generated images as described in
this paper were used. All state-of-the-art approaches
were used with the setups (EWC (Kirkpatrick et al.,
2017), DGR (Kamra et al., 2017)) described in the re-
spective paper. The resulting accuracies can be seen
in table 2. The accuracies are calculated as average
test accuracies over all tasks. It can be seen that cap-
sule networks work reasonably well in both scenarios.
4.2 Boat And House Dataset
In the following section the boat and house dataset
is proposed and explained including experimental re-
sults of a capsule network on this dataset.
Figure 7: The figure shows random examples out of the
dataset presented in section 4.2. The top row shows a rect-
angle on the left and a triangle on the right. The bottom row
shows a house on the left and a boat on the right.
4.2.1 Description of the Dataset
This dataset is newly proposed in this paper. It is
freely available at placeholder. The dataset consists
out of 2000 greyscale images with size 28px × 28px.
These 2000 images are split into 1000 images with
two categories, rectangles and triangles. Each 500 in
various positions, sizes and rotations. And another
subset with 1000 boats and houses split equally which
are a combination of the basic geometric shapes rect-
angles and triangles. For this dataset houses and boats
are defined as follows. A house is a triangle that sits
with its longest side on top of one of the long sides
of a rectangle. A triangle sitting with one of its tips
on the long side of a rectangle is considered a boat.
The images are procedural generated. This dataset
was specifically designed to show off our approach to
explainability with capsule networks and continuous
learning.
KDIR 2021 - 13th International Conference on Knowledge Discovery and Information Retrieval
270

Figure 8: The capsule network architecture used for the boat
and house dataset.
A simple capsule network is used for this dataset
with a shallow architecture consisting out of only one
convolutional layer and one fully connected layer.
The convolutional layer has 256 9×9 convolution ker-
nels with a stride of 1 and ReLU activation. The first
capsule layer (caps1) has 16 capsules with 2 dimen-
sions each (every capsule contains 2 convolutional
units). Each capsule in this first capsule layer sees
the outputs of all convolutional units whose receptive
fields overlap with the location of the centre of the
capsule. The final layer (caps2) has only 4 capsules
which receive input from all the layers below. One
for every class with 4 dimensions each. The archi-
tecture can be seen in figure 8. This capsule network
achieves an accuracy of 91.6% on the dataset.
4.2.2 Results For Continuous Learning
At first a capsule network is trained on the dataset
with rectangles and triangles in the aforementioned
way (except having 4 capsules in the last layer as
preparation for the continuous learning). Retraining
this capsule network on new data from the dataset
with boats and houses leads to an underwhelming ac-
curacy of only 62.8%. The network can not suffi-
ciently learn without old data. As proposed in this
paper (see section 3) it is possible to reconstruct im-
ages which can be used to generate an arbitrary num-
ber of images of rectangles and triangles. In this case
100 images of rectangles and 100 images of triangles
were created. If these are added to the new data the
network trains much more effectively and overcomes
catastrophic forgetting with an accuracy of 91.2%.
This is a big step towards continuous learning with-
out catastrophic forgetting and without any need for
the original data. Even capsule networks that were
not trained with the option of continuous learning in
mind have the in-built ability to do so. Table 3 gives
an overview over the achieved accuracies.
Table 3: Achieved accuracies on the boat and house dataset
with and without retraining. The retraining was done with
only the new data and with additional generated images.
only new data generated images whole dataset
62.8% 91.2% 91.6%
4.3 Omniglot
The Omniglot dataset is a popular task and bench-
mark for continuous and incremental learning. It was
proposed by (Lake et al., 2015) and consists of images
of 50 different alphabets originating from a variety of
languages and cultures. Each letter was handwritten
by 20 different persons. To harness the strength of
the capsule networks to learn hierarchical data and to
increase the amount of available images the dataset
was enhanced with datasets that consist of images of
some basic alphabets. Chinese MNIST (https://www.
kaggle.com/gpreda/chinese-mnist), CoMNIST (https:
//github.com/GregVial/CoMNIST) and MNIST were
used. Subsequently this dataset will be referred to
as extended omniglot. Extended omniglot comes
with two tasks. The first task is to learn on Chinese
MNIST, CoMNISt and MNIST first and afterwards
on omniglot in a transfer learning (tl) manner. This
means all data is available through the whole training.
The second continuous learning task in is to continu-
ally learn on the MNIST datasets and afterwards on
omniglot. During the training of omniglot no images
of the MNIST datasets can be used. These datasets
are used in a first iteration of training to initially learn
basic shapes that are part of commonly used alpha-
bets. With this first step capsules are formed which
learn a common ground for all alphabets with geome-
tries present in basic shapes. Afterwards the network
is trained on omniglot. For the second task images
of the MNIST datasets are generated by the capsule
networks and added to the omniglot dataset for con-
tinuous training.
The results are summarised in table 4 in compari-
son to state-of-the-art approaches. Capsule Networks
achieve an accuracy of 69.8%, 80.4% and 81.3%
respectively. TapNet, DCN6-E and MAML++ are
CNNs specifically designed to perform well on the
omniglot dataset and have a vast amount of param-
eters. They are one-purpose networks. In spite of
that capsule networks are on par with their published
results. As shown in the other experiments capsule
networks are able to achieve competitive accuracy
on several different datasets and can handle a variety
of different tasks. Also they have the additional
ability to support explainability without losing any
accuracy. This makes a strong point that capsule net-
Explainability and Continuous Learning with Capsule Networks
271

Table 4: Achieved accuracies on the plain omniglot as proposed by (Lake et al., 2015) and the omniglot dataset extended with
several most widely used alphabets. tl is the transfer learning task on omniglot and cl is the continuous learning task.
Model Plain Omniglot Extended Omniglot(tl) Extended Omniglot(cl)
Capsule Network (ours) 69.8% 80.4% 81.3%
TapNet (Yoon et al., 2019) 71.4% 78.7% 72.1%
DCN6-E (Liu et al., 2019) 68.9% 80.6% 67.5%
MAML++ (Antoniou et al., 2018) 69.6% 76.2% 69.7%
works are an all-round solution to computer vision
tasks while also being capable of learning continually
and being explainable. The results on the continuous
learning task for extended omniglot shows the suc-
cess of the continuous learning capabilities of capsule
networks especially in comparison to the other ap-
proaches which only achieve accuracies close to their
accuracy on plain omniglot.
5 CONCLUSION AND FUTURE
PROSPECTS
This paper showed that it is possible to effectively
visualise the image information contained in a cap-
sule as defined by the emerging capsule networks. In
combination with the reconstructed images and im-
age descriptions this gives vast information about the
decision-making process of an artificial neural net-
work. Therefore, explainability and transparency is
increased by our work. With capsule networks it is
possible to get closer to the demands regarding ex-
plainability established in game-changing laws. The
part-whole correlation capsule networks are able to
learn, give them the ability to explore new paths of
continuous learning possibly leading to a solution for
catastrophic forgetting and training with limited re-
sources and no access to original training data. Espe-
cially our proposed framework for continuous learn-
ing with reconstructed images is a novel and promis-
ing approach to tackle the main challenges in machine
learning today. For further improvements it would
make sense to use capsule networks as base learner in
a modularised architecture. The capabilities of cap-
sule networks to explain their decision-making pro-
cess and continuous learning ability make them es-
pecially interesting to enhance novel approaches to
continuous learning like Tree-CNN proposed by (Roy
et al., 2018). Scenarios like household robots re-
quire resource efficient training and continuous learn-
ing methods that require as few old data and process-
ing time as possible. Being able to explain where
and why a neural network makes mistakes allows for
very specific retraining. The ability to generate im-
ages without need for the original data is a stable and
data protection compliant way to achieve resource ef-
ficient training.
ACKNOWLEDGEMENTS
This work was funded by the federal state of North
Rhine-Westphalia and the European Regional Devel-
opment Fund FKZ: ERFE-040021.
REFERENCES
Abeysinghe, C., Perera, I., and Meedeniya, D. (2021). Cap-
sule networks for character recognition in low re-
source languages. Machine Vision Inspection Systems,
Volume 2: Machine Learning-Based Approaches,
pages 23–46.
Afshar, P., Mohammadi, A., and Plataniotis, K. N. (2018).
Brain Tumor Type Classification via Capsule Net-
works. 25th IEEE International Conference on Image
Processing ICIP.
Alqaraawi, A., Schuessler, M., Weiß, P., Costanza, E.,
and Berthouze, N. (2020). Evaluating Saliency Map
Explanations for Convolutional Neural Networks: A
User Study. International Conference on Intelligent
User Interfaces.
Antoniou, A., Edwards, H., and Storkey, A. (2018). How
to train your MAML. International Conference on
Learning Representations.
Byerly, A., Kalganova, T., and Dear, I. (2020). A Branch-
ing and Merging Convolutional Network with Homo-
geneous Filter Capsules.
Duarte, K., Rawat, Y. S., and Shah, M. (2018). VideoCap-
suleNet: A Simplified Network for Action Detection.
Advances in Neural Information Processing Systems.
Farquhar, S. and Gal, Y. (2019). Towards robust evaluations
of continual learning.
Gagana, B., Athri, H. U., and Natarajan, S. (2018). Activa-
tion function optimizations for capsule networks. In
2018 International Conference on Advances in Com-
puting, Communications and Informatics (ICACCI),
pages 1172–1178. IEEE.
Geoffrey E. Hinton (1981a). A Parallel Computation that
Assigns Canonical Object-Based Frames of Refer-
ence. Seventh International Joint Conference on Arti-
ficial Intelligence.
KDIR 2021 - 13th International Conference on Knowledge Discovery and Information Retrieval
272

Geoffrey E. Hinton (1981b). Shape Representation in Par-
allel Systems. Seventh International Joint Conference
on Artificial Intelligence.
Geoffrey E. Hinton, A. Krizhevsky, and S. Wang (2011).
Transforming Auto-Encoders. International Confer-
ence on Artificial Neural Networks.
Goodfellow, I. J., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative Adversarial Networks.
Neural Information Processing Systems NIPS.
Hinton, G. E., Sabour, S., and Frosst, N. (2018). Matrix
capsules with EM routing. International Conference
on Learning Representations.
Hirata, D. and Takahashi, N. (2020). Ensemble learning in
CNN augmented with fully connected subnetworks.
Iesmantas, T. and Alzbutas, R. (2018). Convolutional cap-
sule network for classification of breast cancer histol-
ogy images.
Jayasundara, V., Jayasekara, S., Jayasekara, H., Ra-
jasegaran, J., Seneviratne, S., and Rodrigo, R. (2019).
TextCaps: Handwritten Character Recognition With
Very Small Datasets. In 2019 IEEE Winter Confer-
ence on Applications of Computer Vision, pages 254–
262. IEEE Computer Society, Conference Publishing
Services.
K
¨
ading, C., Erik Rodner, Alexander Freytag, and Joachim
Denzler (2017). Fine-Tuning Deep Neural Networks
in Continuous Learning Scenarios. Asian Conference
on Computer Vision, pages 588–605.
Kamra, N., Gupta, U., and Liu, Y. (2017). Deep generative
dual memory network for continual learning.
Kirkpatrick, J., Pascanu, R., Rabinowitz, N., Veness, J.,
Desjardins, G., Rusu, A. A., Milan, K., Quan, J.,
Ramalho, T., Grabska-Barwinska, A., Hassabis, D.,
Clopath, C., Kumaran, D., and Hadsell, R. (2017).
Overcoming catastrophic forgetting in neural net-
works. Proceedings of the National Academy of Sci-
ences, 114(13):3521–3526.
Kumar, A. D. (2018). Novel Deep Learning Model for Traf-
fic Sign Detection Using Capsule Networks. Interna-
tional Journal of Pure and Applied Mathematics Vol-
ume 118 No. 20.
Lake, B. M., Salakhutdinov, R., and Tenenbaum, J. B.
(2015). Human-level concept learning through proba-
bilistic program induction. Science (New York, N.Y.),
350(6266):1332–1338.
Liu, J., Chao, F., Yang, L., Lin, C.-M., and Shen, Q. (2019).
Decoder Choice Network for Meta-Learning.
Malgieri, G. (2019). Automated decision-making in the
EU Member States: The right to explanation and
other “suitable safeguards” in the national legislations.
Computer Law & Security Review, 35(5):105327.
Mobiny, A. and van Nguyen, H. (2018). Fast CapsNet for
Lung Cancer Screening.
Mundhenk, T. N., Chen, B. Y., and Friedland, G. (2019).
Efficient Saliency Maps for Explainable AI.
Nøkland, A. and Eidnes, L. H. (2019). Training Neural Net-
works with Local Error Signals.
Rajasegaran, J., Jayasundara, V., Jayasekara, S., Jayasekara,
H., Seneviratne, S., and Rodrigo, R. (2019). Deep-
Caps: Going Deeper with Capsule Networks.
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition CVPR.
Renkens, V. and van hamme, H. (2018). Capsule Networks
for Low Resource Spoken Language Understanding.
Proc. Interspeech 2018.
Roy, D., Panda, P., and Roy, K. (2018). Tree-CNN: A Hier-
archical Deep Convolutional Neural Network for In-
cremental Learning.
Sabour, S., Frosst, N., and Hinton, G. E. (2017). Dynamic
Routing Between Capsules.
Simonyan, K., Vedaldi, A., and Zisserman, A. (2013). Deep
Inside Convolutional Networks: Visualising Image
Classification Models and Saliency Maps. Interna-
tional Conference on Learning Representations ICLR.
Tielenman, T. (2014). Optimizing Neural Networks That
Generate Images. Dissertation, University of Toronto,
Toronto.
van de Ven, G. M. and Tolias, A. S. (2019). Three scenarios
for continual learning. CoRR.
Xi, E., Bing, S., and Jin, Y. (2017). Capsule Network Per-
formance on Complex Data. International Joint Con-
ference on Neural Networks (IJCNN).
Xiao, H., Rasul, K., and Vollgraf, R. (2017). Fashion-
MNIST: a Novel Image Dataset for Benchmarking
Machine Learning Algorithms.
Y. LeCun, L. Bottou, Yoshua Bengio, and P. Haffner (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE.
Yoon, S. W., Seo, J., and Moon, J. (2019). TapNet: Neu-
ral Network Augmented with Task-Adaptive Projec-
tion for Few-Shot Learning. Proceedings of the 36th
International Conference on Machine Learning.
Zenke, F., Poole, B., and Ganguli, S. (2017). Improved mul-
titask learning through synaptic intelligence. CoRR.
Zhang, Q., Wang, X., Wu, Y. N., Zhou, H., and Zhu, S.-C.
(2019). Interpretable CNNs for Object Classification.
Explainability and Continuous Learning with Capsule Networks
273
