
The Optimal Location of the Electric Vehicle Infrastructure with
Heterogeneous Batteries in the Highways
Mohammed Bourzik
1a
, Ahmed Elhilali Alaoui
2
1
Modelling and Scientific Computing Laboratory, Faculty of Science and Technology, Fez, Morocco
2
Euro-Mediterranean University of Fez, BP 51, Fez, Morocco
Keywords: Electric vehicles, Heterogeneous batteries, Long road, Mathematical programming.
Abstract: The dynamic wireless charging makes the possibility of charging electric vehicles without contact and while
it is in motion from the transmitters buried (segments and inverters) under the road. This technology is applied
for homogeneous buses by the Korean institute of advanced technology (KAIST), called online electric
vehicles (OLEV) (Jang, 2012). Our contribution in this work is to study the problem of locating wireless
charging infrastructure on a long route between origin O and destination S, with heterogeneous battery
vehicles. On the first side, each type of vehicle requires its allocation of segments in the road because of the
heterogeneity of batteries, which increases the number of recharge transmitters in the highway; for this
purpose, we search to minimize the infrastructure cost by reducing the number of segments and inverters. On
the other hand, the activity of a recharge segment may be helpful for one vehicle and useless for the other
since each vehicle type has its characteristics (autonomy, puissance, battery capacity). For this reason, we aim
to minimize the use of the recharge transmitters for each vehicle type. We propose to model the problem as a
mathematical problem and to solve it by CPLEX optimizer for limited instances.
1 INTRODUCTION
Since the previous years, the characteristics of
electric vehicle (EV) batteries have improved
considerably. For the same weight and similar
volume, the quantity of energy available increased,
which increases their autonomy, and it is sufficient to
travel on daily trips (for small to medium trips).
However, it is not enough for long journeys like the
highway. It is characterized by a long distance
between the origin and the destination, and the high
speed of vehicles on this kind of road drains their
battery very quickly.
Wireless charging (WC) is an effective solution
for long journeys; since it can charge the batteries
dynamically while the vehicle is in motion from a set
of inductive cables and inverters placed on the road
to meet the vehicle's charging requirements at all
times. This technology makes it possible to transfer
several tens of kilowatts over short distances (a few
tens of centimetres) with good efficiency and safety
for the human body if a correctly sized magnetic
shielding is present. The advantage would thus be to
recharge vehicles on the highway.
a
https://orcid.org/0000-0001-6735-8013
The WC system (WCS) is composed of EV and
power transmitters (see figure 1). An inverter
converts the DC power into high-frequency AC or
voltage. After converting the alternating magnetic
fields generated by an underground electric power
line to electric power, a pickup coil installed on the
bottom of the vehicle receives this electric power. The
received power goes through a rectifier and regulator
before arriving at the battery (Chun, 2014).
The WCS is an ideal solution for the highway, but
the high cost of this technology limits the use only
when the charge is needed. Many works presented the
problem of locating a minimum cost infrastructure of
electric vehicle induction charge. However,
researchers considered the vehicle's batteries to be
homogeneous. In reality, each vehicle battery has its
characteristic, so our contribution is to find an optimal
location of the electric vehicle infrastructure with
heterogeneous batteries in the highways. The
heterogeneity of vehicle batteries adds more
difficulty to search for places of lack of charge
because each type has its characteristics (range
power, consumption, charging rate). It requires a
mathematical study to find a minimum cost
244
Bourzik, M. and Elhilali Alaoui, A.
The Optimal Location of the Electric Vehicle Infrastructure with Heterogeneous Batteries in the Highways.
DOI: 10.5220/0010731900003101
In Proceedings of the 2nd International Conference on Big Data, Modelling and Machine Learning (BML 2021), pages 244-248
ISBN: 978-989-758-559-3
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

infrastructure that ensures the movement of each type
of vehicle without remaining out of load by the
minimum use of the segments for each vehicle type;
this is precisely our goal to this work.
Figure 1: Wireless charging system
2 LITERATURE REVIEW
Wireless charging (WC) allows charging the
vehicle’s battery without contact, known as Wireless
Power Transmitters (WPT), existing in two types.
The first type is the stationary WPT, which presents a
recharging mode from which the VE can be charged
by induction when it is in stop mode. The use of this
world is equivalent to the use of a charging cable,
except that stationary WPT technology has the
advantage of being practical and more secure for
more details see (Young, 2016). The second type is
dynamic WPT, which allows an EV to be charged by
induction while it is in motion. The Korean Advanced
Institute of Science and Technology KAIST has
installed this technology on its campus to allow its
buses to charge by induction while running called by
one line electric vehicle (OLEV)(Jang, 2012).
Ko, Y. D. and Jang Y. J (Ko, 2014) introduced the
concept of battery power that was instantly required.
They introduced a mathematical model that seeks to
minimize the cost of installing the power transmitters
and the cost of the battery according to its capacity.
They solved the model using the optimization
algorithm for particle swarms. Jeong et al. (Jeong
2014) have added the impact of battery charging and
discharge frequency on its life cycle.
Among the best-known works, we cite that of Young
Jae Jang (Jang, 2012), who proposed a mathematical
model to determine a compromise between the
battery capacity of an EV and the location of the
charge transmitters inductive on a fixed route a single
path. They assumed that the bus travel speed is preset,
and the batteries are identical. Liu and Song (Liu,
2017) studied the dynamic behaviour of this model
using a nonlinear model solved by genetic algorithms.
Young Jae Jang (Ko, 2014) compared the initial
investment costs of three types of charging systems.
The first type is stationary wireless charging (SWC),
in which charging happens when the vehicle is parked
or idle. The second type is quasi-dynamic wireless
charging (QWC), which allows the charging when the
car is moving slowly or in stop-and-go mode, and
dynamic wireless charging (DWC), in which vehicle
can charge even when it is in motion.
Nisrine Mouhrim et al. (Nisrine, 2018) do the
generation of the multiple paths. They considered a
multipath network between the origin and the
destination station. They sought a compromise
between the cost of installing the power transmitters
and the cost of the batteries, which are assumed
identical. Hassan Elbaz and Elhilali Alaoui Ahmed
(Hassane, 2020) search for a compromise between the
infrastructure cost and the battery capacity in a
multipath network, round-trip.
Xiaotong Sun et al. (Xiaotong Sun et al., 2020)
investigated the optimal deployment of static and
dynamic charging infrastructure considering the
interdependency between transportation and power
networks.
3 PROBLEMS AND MODELING
3.1 Problem Description and Objective
We consider a highway of origin O and destination S,
and a set of vehicles with heterogeneous batteries, and
we seek to satisfy by the least cost its needs of the
load during their journeys from O to the destination S
by the allocation of the power transmitters on the road
like a dynamic station (Fig. 2).
Figure 2: Highway with dynamic stations
We assume that the highway is divided into two
zones, the 1
st
road zone without stations, and the 2
nd
that we will put the dynamic stations (Figure 2).
The 2
ed
zone is subdivided into several congruent
segments, and we will consider each segment as a
potential transmitter. If the charging is needed, the
segment will be equipped with an inductive emitting
cable plus an inverter or will fit only with an emitting
cable, and if the loading is not needed, the segment
The Optimal Location of the Electric Vehicle Infrastructure with Heterogeneous Batteries in the Highways
245
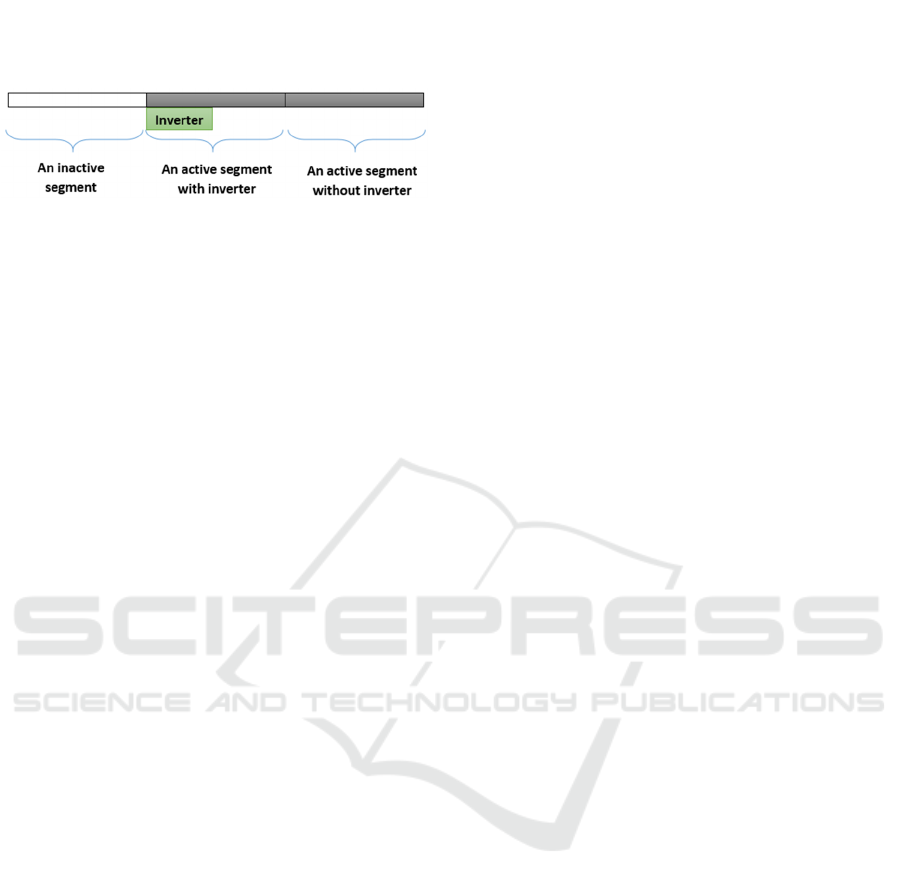
will be inactive (see Fig. 4). We note that a single
inverter can power a limited series of successive
active segments.
Figure 3: Types of segments
We search firstly to determine the minimum of
active segments and inverters in the 2
ed
zone to meet
the energy needs of vehicles.
On the other hand, each type of battery requires its
allocation of the segments because of the
heterogeneity of batteries; An active segment can be
useless for one vehicle type and profitable for the
other; for that, we search to minimize the number of
segments used by each vehicle type.
3.2 Mathematical Model
We seek to model the problem as a mathematical
problem with constraints. We present as follows a set
of notations, data, constraints, and objective function.
In this work, we assume that the fleet of vehicles has
the same speed and acceleration on the highway, and
the wireless charging system is capable of supplying
each type of vehicle.
3.2.1 Notations and Data
As we mentioned earlier, we discretized the highway
into segments of the same length; the first segment
will be denoted by 𝑂, the last segment by 𝑓, and the
other segments by 𝑔 with 𝑔 𝜖 𝑂,…,𝑓.
Vehicles are considered to have a heterogeneous
battery, let 𝜑 be the set of batteries and 𝛼 the index of
a type of vehicles with 𝛼𝜖 0,…,
|
𝜑
|
.
The infrastructure cost is composed of the cost of
the recharge segments and the price of the inverters.
Let 𝐶
and 𝐶
respectively the unit cost of an
active segment without an inverter and the unit cost
per inverter.
The starting point of each vehicle type is 𝑂, we not
that 𝑡
the arrival time of the fleet at the starting point
of segment 𝑂. As mentioned earlier, the fleet of
vehicles has the same speed and acceleration on the
highway, so it will have the same time to arrive at the
starting point of each 𝑔
th
segment, which we note
by 𝑡
. We consider the following notations:
𝐼
: The battery capacity of vehicle 𝛼
𝑇
𝑡: The energy supply rate of vehicle 𝛼
𝐷
𝑡
: The energy consumption rate of
vehicle 𝛼
𝐼
𝑎𝑛𝑑 𝐼
: Are the lower and upper limits
of the battery level, respectively. These
values have the following relationship.
𝐼
𝐼
𝛿 and 𝐼
𝐼
𝛽 with
𝛿,𝛽 ∈
0,1
𝑁
: The maximum number of the active
segment in each series that can use one
inverter
3.2.2 Decision Variables
The highway is subdivided into several congruent
segments, and we search the minimum number of
active segments and inverters into the road, that we
define two decision variables 𝑋
𝑎𝑛𝑑 𝑍
such as:
𝑋
1 𝑖𝑓 𝑡ℎ𝑒 𝑔
𝑠𝑒𝑔𝑚𝑒𝑛𝑡 𝑖𝑠 𝑎𝑐𝑡𝑖𝑣𝑒
0 otherwise
!
𝑍
1 𝑖𝑓 𝑡ℎ𝑒 𝑔
𝑠𝑒𝑔𝑚𝑒𝑛𝑡 ℎ𝑎𝑠 𝑎𝑛 𝑖𝑛𝑣𝑒𝑟𝑡𝑒𝑟
0 otherwise
Each type of vehicle has its character because of
the heterogeneity of the batteries, so the use of the
segments is different from a kind of vehicle to
another; we then define the decision variable 𝑦
such
as:
𝑦
1 𝑖𝑓 𝑣𝑒ℎ𝑖𝑐𝑙𝑒 𝛼 𝑢𝑠𝑒𝑠 𝑡ℎ𝑒 𝑠𝑒𝑔𝑚𝑒𝑛𝑡 𝑔
0 otherwise
/
Let 𝐼
𝑡
be the amount of energy in the battery 𝛼
at time 𝑡.
3.2.3 Constraints
1. We assume that vehicles start at the beginning of
segment 𝑂 with the maximum load 𝐼
𝐼
𝑡
𝐼
∀𝛼=0,…,|𝜑|
2. The remaining charge at the beginning of each
segment must always be greater than the battery’s
minimum capacity
𝐼
𝑡
𝐷
𝑡
𝑇
𝑡 𝒚
𝒈
𝜶
𝑑𝑡
𝐼
∀𝑔0,..,𝑓1 ; ∀𝛼0,…,|𝜑|
3. Updates the remaining charge at the beginning of
each segment.
BML 2021 - INTERNATIONAL CONFERENCE ON BIG DATA, MODELLING AND MACHINE LEARNING (BML’21)
246

𝐼
𝑡
min 𝐼
; 𝐼
𝑡
𝐷
𝑡
𝑇
𝑡 𝒚
𝒈
𝜶
𝑑𝑡, ∀𝑔0,…,𝑓1 ∀𝛼=0,…,|𝜑|
4. A segment g may be used by vehicle 𝛼 only if it is
active.
𝑦
𝑋
∀𝛼0,…,|𝜑|, ∀𝑔0,..,𝑓
5. A segment 𝑔 is active if it is used by at least one
type of vehicle.
𝑋
∑
𝑦
, ∀𝑔0,..,𝑓
6. A segment 𝑔 cannot have an inverter unless it is
active.
𝑍
𝑋
∀𝑔0,..,𝑓
7. The start of each series of active segments must
contain one inverter, and one inverter can only
supply at most 𝑁
active segments.
𝑍
1𝑋
𝑋
;∀𝑔0,..,𝑁
1
𝑍
1𝑍
𝑋
𝑋
2
∀𝑔𝑁𝑖𝑛1,..,𝑓
─ For (1) if the segment 𝑔 is active and its
predecessor is active in this case, the segment 𝑔
does not have an inverter because it belongs to an
active series of length less than or equal to 𝑁
,
otherwise, if a segment 𝑔 is active and its
predecessor is inactive in this case the segment 𝑔
will have an inverter.
─ For (2), a g-segment can only contain one inverter:
If g is the start of an active series (i.e., g is an active
segment and its predecessor is idle). Or if g is
prefixed with a longer active string than 𝑁
segments.
3.2.4 Objective Function
We seek to minimize the cost of the infrastructure by
reducing the number of active segments and inverters
on the road (3). On the other hand, we search to
minimize the segments used by each vehicle type (4).
Therefore, we have two objectives to optimize.
𝑴𝒊𝒏 𝑪
𝒔𝒈𝒕
𝑿
𝒈
𝑪
𝒊𝒏𝒗
𝒁
𝒈
3
𝑴𝒊𝒏 𝒚
𝒈
𝜶
𝒇
𝒈𝟎𝜶𝝐𝝋
4
4 PROBLEMS AND SOLVING
Our objective in this work is to build at the lowest cost
a wireless charging infrastructure that ensures the
movement of the heterogeneous fleet of vehicles
without remaining out of charge by the minimum use
of the segments for each vehicle type. The problem is
transformed into an equivalent linear programming
problem and solved with a CPLEX optimizer for a
limited instance.
4.1 Transport Network Data
The instances used in this example serve only to
validate the model because the CEPLEX optimizer
can only solve a limited instances problem. It solves
our problem with four types of vehicles and 30
segments. Tables 1 and 2 contain the energy supply
rate, the energy consumption rate of each vehicle
type, and the other data.
Table 1: Vehicles data
Battery
Capacity
𝐼
The energy
supply rate
The energy
consumption
rate
Vehicle 1 8,8 4.2 1,8
Vehicle 2 32,2 3 1
Vehicle 3 18,4 5 4
Vehicle 4 25 5.5 0,9
Table 2: Other data
Notation Description Value
𝐶
The unit cost per
inverter
3000
𝐶
The unit cost of an
active segment without
an inverter
800
𝑁
The maximum number
of the segment in each
series can use one
inverter
4
𝛿 The lower limit
coefficients
0.2
𝛽 The upper limit
coefficients
0.8
The Optimal Location of the Electric Vehicle Infrastructure with Heterogeneous Batteries in the Highways
247
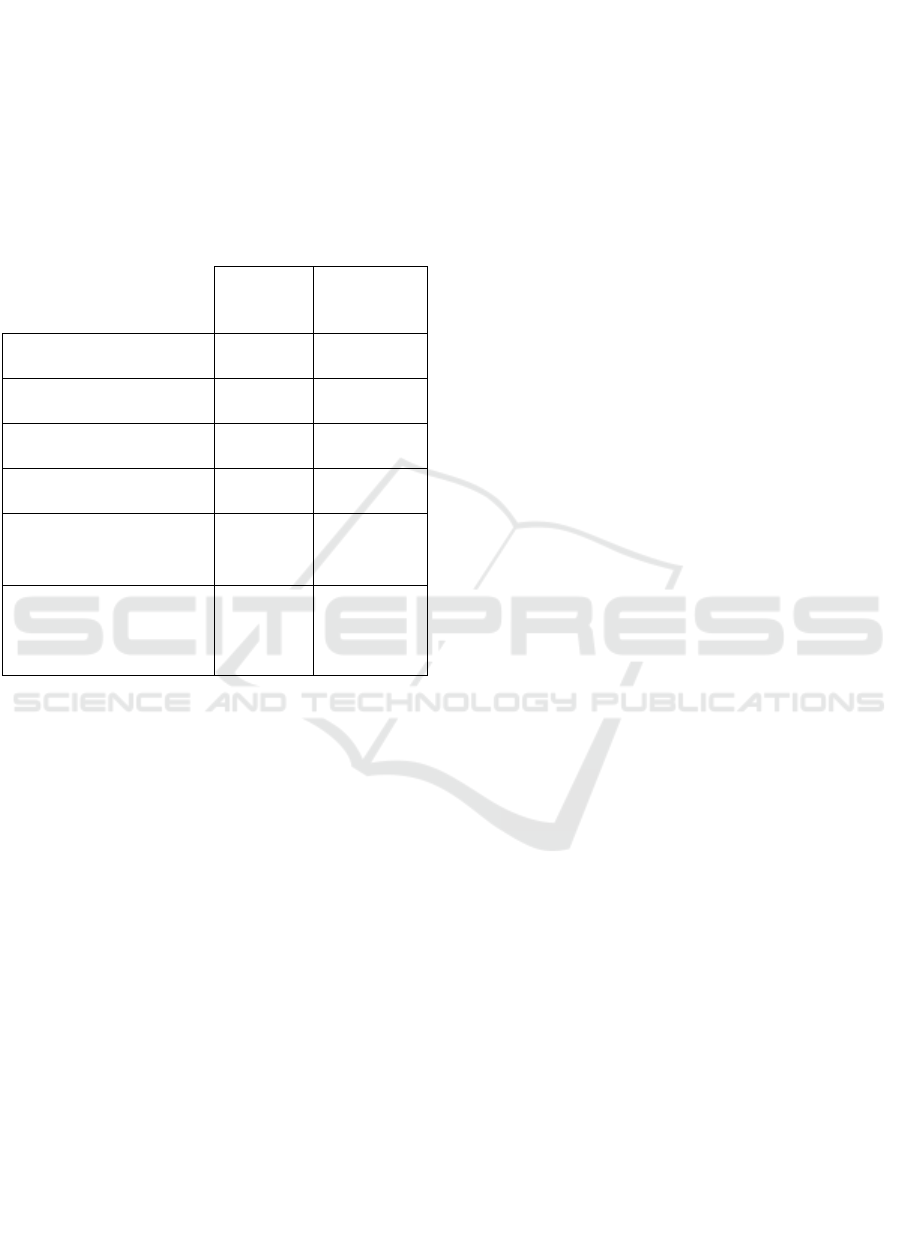
4.2 Results
We solve the problem for each one of the objectives
because CPLEX can only solve mono-objective
problems. For the first objective, we search to
minimize the infrastructure cost, and for the second
objective, we search to minimize the set of segments
used by each vehicle type. Table 3 contains the results
for each objective.
Table 3: Results for each objective
Minimizing
the 1
st
o
b
jective
Minimizing
the 2
sd
o
b
jective
The number of segments
used
b
y the vehicle 1
18 12
The number of segments
used
b
y the vehicle 2
7 6
The number of segments
used
b
y the vehicle 3
23 21
The number of segments
used
b
y the vehicle 4
8 2
The infrastructure cost
(The cost of segments + the
cos
t
of inverters)
36400
41000
The uses number of
segments by vehicles
𝑦
56
41
When we search to minimize the infrastructure
cost, each type of vehicle will necessarily use the
activated segments to not remain in breach of the load
even if they are useless for some vehicles, which
increases the use of the segments.
When we minimized the number of segments used
by the vehicles, the cost of the infrastructure increases
because each type of vehicle uses the segments when
the load is needed, which increases the number of
active segments because the locations where the
charge is required are different from one vehicle to
another.
5 CONCLUSION
This work presented a mathematical model that aims
to find an optimal location for the wireless charging
infrastructure on the highway to ensure the movement
of a heterogeneous fleet of vehicles without
remaining out of charge by the minimum use of
segments for each vehicle type. We solved the
problem by CEPLEX optimizer for each objective
function with limited instances. The next step is to
find a compromise between the two objectives, so we
will use a metaheuristic as a method of resolution.
REFERENCES
Jang, Y. J., Jeong, S., & Lee, M. S. (2016). Initial energy
logistics cost analysis for stationary, quasi-dynamic,
and dynamic wireless charging public transportation
systems. Energies, 9(7), 483.
Jang, Y. J., Ko, Y. D., & Jeong, S. (2012, March). Optimal
design of the wireless charging electric vehicle. In 2012
IEEE International Electric Vehicle Conference.
Jeong, S., Jang, Y. J., & Kum, D. (2014, October). Design
optimization of the OLEV system considering battery
lifetime. In 17th International IEEE Conference on
Intelligent Transportation Systems (ITSC) (pp. 2492-
2498). IEEE.
Jang, Y. J., Ko, Y. D., and Jeong, S, 2012. Optimal design
of the wireless charging electric vehicle. Electric
vehicle conference (pp. 1–5).
Hassane, Elbaz, and Elhilali Alaoui Ahmed, 2020. "The
optimal location of the electric vehicle infrastructure
utilizing wireless charging in a multipath network,
round-trip." 2020 5th International Conference on
Logistics Operations Management (GOL). IEEE.
Ko, Y. D., and Jang, Y. J., 2014. The parameter design of
the wireless power electric vehicle. Vehicular
technology conference (VTC Spring).
Liu, Z., and Song, Z, 2017. Robust planning of dynamic
wireless charging infrastructure for battery-electric
buses (pp. 77–103).
Nisrine Mouhrim, Ahmed El Hilali Alaoui and Jaouad
Boukachour, 2019. Pareto efficient allocation of in-
motion wireless charging infrastructure for electric
vehicles in a multipath network (pp. 1- 15).
Qiu, C., KT, C., Ching, T. W., & Liu, C., 2014. Overview
of wireless charging technologies for electric vehicles.
Journal of Asian Electric Vehicles, 12(1), 1679-1685.
Sun, Xiaotong, Zhibin Chen, and Yafeng Yin, 2020.
"Integrated planning of static and dynamic charging
infrastructure for electric vehicles." Transportation
Research Part D: Transport and Environment.
BML 2021 - INTERNATIONAL CONFERENCE ON BIG DATA, MODELLING AND MACHINE LEARNING (BML’21)
248
