
Design and Implementation of a Path Finding Robot using Modified
Trémaux Algorithm
Semuil Tjiharjadi
a
Department of Computer System, Maranatha Christian University, Jl. Surya Sumantri 65, Bandung, Indonesia
Keywords: Trémaux Algorithm, Maze, Pathfinding, Manhattan Distance
Abstract: Using a robot to find a path to achieve a target location in an unknown maze requires a robot that can explore
the maze and determine the direction of the intersection in the maze. The robot must map the maze, determine
a route and try to reach its destination as fast as possible through the closest path. Trémaux algorithm is one
of the maze solver algorithms that is used to explore a maze and its use to find a way out of the maze, meaning
that this algorithm is designed for purposes that are on the edge of a maze and not in the middle of a maze.
For this reason, Trémaux algorithm was modified by adding the Manhattan Distance algorithm to improve
the ability of the robot to find targets in the middle of the maze. Using the Manhattan Distance algorithm
made able to make better decisions compare to Trémaux random decision at branch position. The application
of a combination of these algorithms enables the ability to search for paths in an unknown maze environment.
The success rate to explore, map the maze, and find the shortest path to the destination is dramatically
increased using a modified Trémaux algorithm.
1 INTRODUCTION
The development of an autonomous mobile robot that
can find itself and reach its destination without being
controlled has been growing rapidly. The ability of a
mobile robot to move automatically from a place to a
destination without the assistance of an operator is an
important part of the capability of a mobile robot
which is continuously being developed. This is an
application that is often used in the gaming industry.
Its use in warehouse, search and rescue applications,
its development in the era of automatic vehicles, is
one of the developing researches. Various researches,
methods, and algorithms have been developed to
support autonomous mobile robots. These methods
and algorithms are unique along with their respective
advantages and disadvantages.
Various studies on the development of maze
pathfinding have been carried out, Flood Fill
Algorithm (Chu et al., 2019; Jabbar, 2016; S.
Tjiharjadi & Setiawan, 2016), Fisher-Yates Shuffle
algorithm (Hoetama et al., 2019), A-Star (Downey &
Charles, 2015; Kumar & Kaur, 2019; S. Tjiharjadi et
al., 2017; Zikky, 2016), Pledge Algorithms (S.
a
https://orcid.org/0000-0003-0424-2122
Tjiharjadi, 2019), Modified A-Star (Kang et al.,
2018), Hybrid approach (Ansari et al., 2015),
Artificial Bee (Faridi et al., 2018), Dijkstra algorithm
(Reddy, 2013), and also Trémaux (Yew et al., 2011).
In this paper, it is reported that research using the
Trémaux algorithm is applied to a mobile robot that
has a job to find the route from the start position to
the target position automatically, it finds a path in an
unknown maze. For this need, the algorithm is
modified so that it can reach the target in the middle
of the maze. This research focuses on implementing
a small mobile robot designed to solve a maze using
the Trémaux algorithm.
Robot maze problems are based on decision-
making algorithms that are a very important field of
robotics. The mobile robot has the task of finding the
way to resolve a maze in the least amount of time and
using the shortest way (Elshamarka & Bakar Sayuti
Saman, 2012). It needs to navigate from a maze
corner to the center as quickly as possible (Semuil
Tjiharjadi, 2020).
The robot knows where the starting point is and
where the target is, but it needs to look for all the
information on the obstacles to reach the target. The
maze is made up of 25 square cells, each of which is
Tjiharjadi, S.
Design and Implementation of a Path Finding Robot using Modified Trémaux Algorithm.
DOI: 10.5220/0010744100003113
In Proceedings of the 1st International Conference on Emerging Issues in Technology, Engineering and Science (ICE-TES 2021), pages 39-48
ISBN: 978-989-758-601-9
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
39
approximately 18 cm x 18 cm in size. The cells are
set up to form a labyrinth of 5 rows x 5 columns. A
cell at its angles is a starting location and the target
location is in the middle of the maze. Only one cell is
open to get past. Requirements for maze walls and
support platforms are given in the IEEE standard.
2 METHODS (AND MATERIALS)
The Trémaux algorithm, created by Charles Pierre
Trémaux, is a method invented to find a way out of a
maze. The way it works is to draw a line on the floor
to mark a path, being able to find an existing exit.
Only the path found by this algorithm is not
necessarily the closest route.
2.1 Trémaux Algorithm
Trémaux algorithm works according to the following
rules:
1. Every time the robot passes through the path, the
robot marks the path that is being traversed, so
that it is visible from both ends of the fork.
2. Check each lane when entering the lane, do not
enter the road that has been marked twice.
3. The robot can choose which path at a random
fork that does not have a mark.
4. When the Robot hits a dead end, it will turn back
through the road and re-mark the road so that the
road has two signs which means it doesn't need
to be crossed again.
5. The robot will always choose the path that has
the least marks.
There are three types of paths to the Trémaux
algorithm in total:
• Unmarked, which means the section has not been
explored,
• Marked once, which indicates that the line has
been crossed once,
• Marked twice, the robot has passed and is forced
to return because there is no way.
This algorithm is effective in finding a way out of
the maze, but it has several problems, such as
difficulty in drawing a line to mark a path in real life,
and then the path found to exit is not necessarily the
closest path.
To improve the Trémaux algorithm, researchers
added the Manhattan distance algorithm when path
selection was made. So that the selected path at the
branch is no longer chosen randomly, but is selected
based on the calculation of the Manhattan distance. In
simple terms, Manhattan Distance calculates the
distance by simplifying the distance between two
points as the sum of the absolute values of the two
coordinate distances (Shen et al., 2021).
𝑑1
𝑝,𝑞
=
|
𝑝𝑖 −𝑞𝑖
|
(1)
The use of the Manhattan distance helps the Robot
determine which branch to take, although it does not
mean that the branch is the closest path to the target,
at least it helps as a reference in choosing a path.
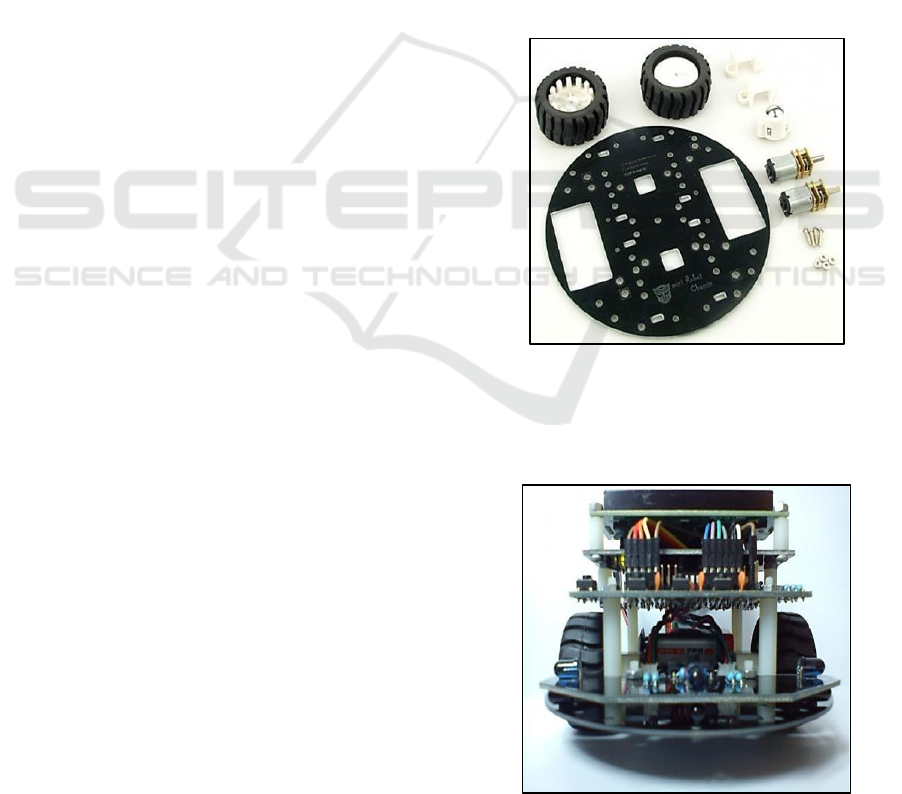
2.2 Robot Design
The robot in this study was designed to use a miniQ
2WD robot frame. The robot chassis is 122mm in
diameter, using a pair of wheels driven by a pair of
Direct Current (DC) motors as the main drive.
Figure 1: Robot chassis.
This robot can count the number of wheel
rotations because it is equipped with several rotary
encoders that are mounted on a DC motor.
Figure 2: Robot design.
ICE-TES 2021 - International Conference on Emerging Issues in Technology, Engineering, and Science
40

Figure 3: Robot system block diagram.
This robot can control the speed of movement and
is equipped with 3 infrared sensors to detect the
position of the front, right, and left of the labyrinth
wall. By using the AT Mega 324 microcontroller as a
control center to respond to input signals, it can run
the actuator based on the algorithm that has been
programmed. The flowchart of the main program is
shown in Figure 6.
2.3 Maze Layout
For testing purposes, a maze was designed that has a
cell size of 5 × 5 with a side length of 1.32 m2. Each
cell can be placed in a barrier that serves as a wall that
the robot needs to detect in its quest to find a path to
the target (Figure 4).
Figure 4: Maze arena.
The use of the Trémaux algorithm, which requires
marking line by line, is difficult in actual conditions.
Therefore, tagging is done by mapping using a two-
dimensional memory array with a size of 5x5. For this
purpose, two 5x5 memory arrays are designed, the
first array is used to store information on each cell
wall of the maze, while the second array stores the
tagging in each cell. The position of the robot
expressed in coordinates (row, column) is used to
calculate the Manhattan distance from the target
destination.
3 RESULTS AND DISCUSSION
The real robot was tested on an arena maze (no
software simulation) with a layout as shown in Figure
6. The robot started walking and marked the path by
updating the information on the cells in the memory
array. The robot started moving from the initial cell
(row 4, column 0) to the target cell (row 2, column 2)
and then returned to the starting cell. The robot's
initial orientation was facing North.
0,0 0,1 0,2 0,3 0,4
1,0 1,1 1,2 1,3 1,4
2,0 2,1 2,2 2,3 2,4
3,0 3,1 3,2 3,3 3,4
4,0 4,1 4,2 4,3 4,4 1
Figure 5: Coordinate Cell and Maze Arena Layout.
The following was one of the experiments carried out
by the robot from the starting point to the target point,
using the Trémaux algorithm and the Manhattan
distance. The robot position was marked as Yellow
and the destination was marked as Orange. Figure 6
shows the Labyrinth coordinates and a schematic of
the Robot's starting position (4,0). Whenever the
robot moves to a new cell, it would update the value
cell in the robot's memory. Cell value = 1 means that
the robot had only visited once.
Design and Implementation of a Path Finding Robot using Modified Trémaux Algorithm
41
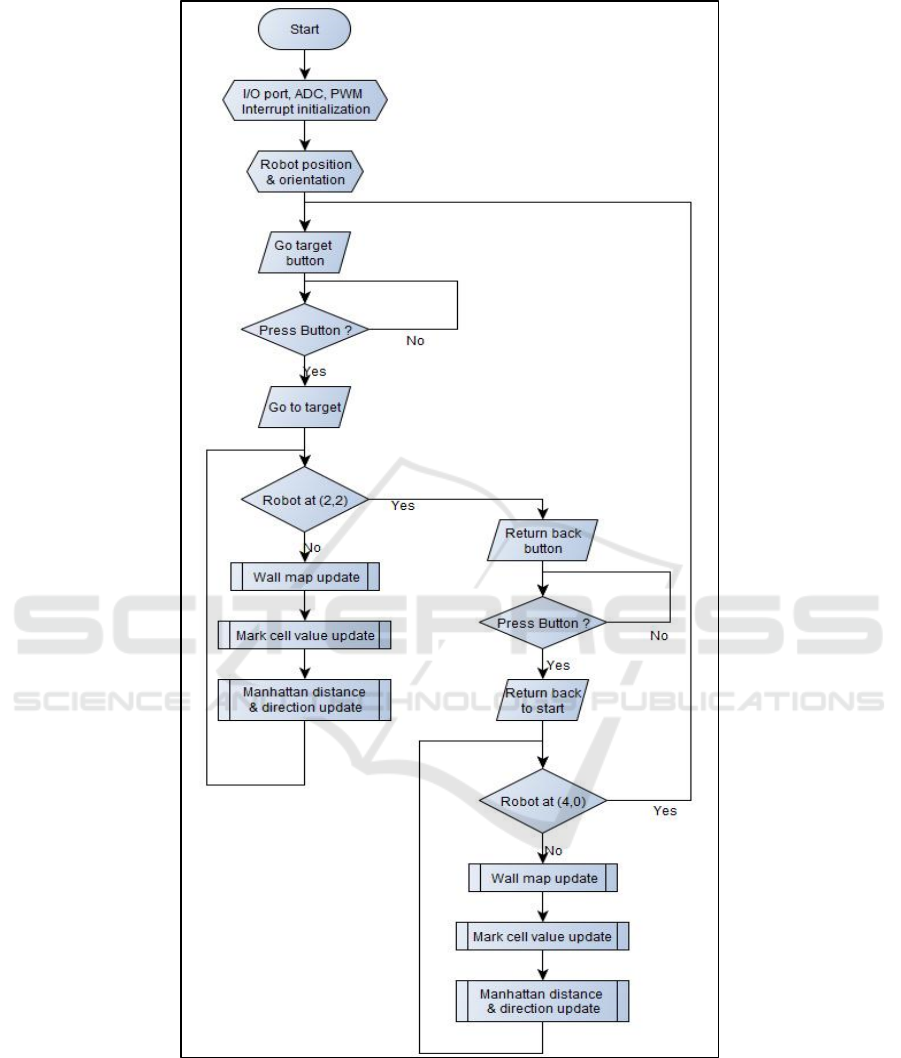
Figure 6: Flowchart of the main program.
When the robot arrives at an intersection, the robot
will compare the Trémaux cell value which marks
whether the route has been taken or not. The main
option is to choose a road that has never been traveled
(smaller Trémaux cell value), then if both cell update
values are the same, the smallest Manhattan distance
value will be selected from the available options.
Manhattan distance is the distance from a position to
a destination as a straight line.
ICE-TES 2021 - International Conference on Emerging Issues in Technology, Engineering, and Science
42

1
1
Figure 7: The Robot had only 1 choice and moved to (3,0)
and updated Trémaux cell value.
1 1
1
Figure 8: The Robot moved to (3,1) because the Manhattan
distance value of (3,1) was smaller than (2,0). Both have the
same Trémaux cell value.
1
1 1
1
Figure 9: The Robot moved to (2,1) because the Manhattan
distance value of (2,1) was smaller than (4,1). Both have the
same Trémaux cell value.
1
1
1 1
1
Figure 10: The Robot had only 1 choice and moved to (1,1)
and updated Trémaux cell value.
1 1
1
1 1
1
Figure 11: The Robot moved to (1,2) because the
Manhattan distance value of (1,2) was smaller than (1,0).
1
1 1
1
1 1
1
Figure 12: The Robot had only 1 choice and moved to (0,2).
1 1
1 1
1
1 1
1
Figure 13: The Robot had only 1 choice and moved to (0,1).
1 1 1
1 1
1
1 1
1
Figure 14: The Robot had only 1 choice and moved to (0,0).
Design and Implementation of a Path Finding Robot using Modified Trémaux Algorithm
43

2 2 1
1 1
1
1 1
1
Figure 15: The Robot found a dead end and returned to the
previous path and marked it with the value Trémaux +1 =
2. This means that it had been visited twice.
2 2 2
1 1
1
1 1
1
Figure 16: The Robot only had 1 choice and moved to (0,2).
2 2 2
1 2
1
1 1
1
Figure 17: The Robot only had 1 choice and moved to (1,2).
2 2 2
2 2
1
1 1
1
Figure 18: The Robot only had 1 choice and moved to (1,1).
2 2 2
1 2 2
1
1 1
1
Figure 19: The Robot moved (1,0) that never been visited.
2 2 2
1 2 2
1 1
1 1
1
Figure 20: The Robot moved to (2,0).
2 2 2
1 2 2
1 1
2 1
1
Figure 21: The Robot moved to (3,0) and marked it as 2.
2 2 2
1 2 2
1 1
1 2
1
Figure 22: The Robot moved to (3,1) because it had a
smaller Manhattan Distance value.
ICE-TES 2021 - International Conference on Emerging Issues in Technology, Engineering, and Science
44

2 2
1 2 2
1 1
1 2
1 1
Figure 23: The robot moved to (4,1), it had a smaller
Manhattan Distance value.
2 2 2
1 2 2
1 1
1 2
1 1 1
Figure 24: The Robot moved to (4,2) and updated Trémaux
value.
2 2 2
1 2 2
1 1
2 2 1
1 1 1
Figure 25: The Robot moved to (3,2) and updated Trémaux
value.
2 2 2
1 2 2
1 1 1
2 2 1
1 1 1
Figure 26: The Robot arrived at its destination (2,2) in 20
steps.
Figure 7 to Figure 26 shows the experiment of the
robot's journey using the Trémaux algorithm and
Manhattan Distance to reach the target point while
updating the Trémaux cell value. Each time the robot
is in a new cell, the robot updates the cell value
incremented by one. After the robot arrived at the
destination, then that point became the starting point,
and the starting point turned into the destination point
on the robot's return journey.
1
1
Figure 27: The Robot moved to (3,2) that had a smaller
Manhattan distance.
1
1
1
Figure 28: The Robot moved to (4,2) that had a smaller
Manhattan distance.
1
1
1 1
Figure 29: The Robot moved to (4,1) based on Trémaux
value.
1
1 1
1 1
Figure 30: The Robot moved to (3,2) that had a smaller
Manhattan distance.
Design and Implementation of a Path Finding Robot using Modified Trémaux Algorithm
45

1
1 1 1
1 1
Figure 31: The Robot moved to (3,0) that had a smaller
Manhattan distance than (2,1).
1
1 1 1
1 1 1
Figure 32: The Robot arrived at its destination in 6 steps.
Figures 27 to 32 show the robot returning to its
starting point. The destination point becomes the
starting point and the starting point becomes the
destination point on the robot's return journey. This
layout was also tested using the original Trémaux
algorithm without using the Manhattan distance
value. This experiment can be seen in table 1.
Table 1: Maze Exploration using only the Trémaux
algorithm.
Exp Status Routes
Number
of ste
p
s
1
Run
(4,0) → (3,0) → (2,0) →
(1,0) → (1,1) → (1,2) →
(0,2) → (0,1) → (0,0) →
(0,1) → (0,2) → (1,2) →
(1,1) → (2,1) → (3,1) →
(4,1) → (4,2) → (3,2) →
(
2,2
)
18
Return
back
(2,2) → (2,3) → (1,3) →
(1,4) → (0,4) → (0,3) →
(0,4) → (1,4) → (2,4) →
(3,4) → (4,4) → (4,3) →
(3,3) → (3,2) → (4,2) →
(4,1) → (3,1) → (2,1) →
(1,1) → (1,0) → (2,0) →
(3,0) → (4,0)
18
2 Run
(4,0) → (3,0) → (3,1) →
(4,1) → (4,2) → (3,2) →
(3,3) → (4,3) → (4,4) →
(3,4) → (2,4) → (1,4) →
(0,4) → (0,3) → (0,4) →
18
Exp Status Routes
Number
of ste
p
s
(1,4) → (1,3) → (2,3) →
(
2,2
)
Return
back
(2,2) → (2,3) → (1,3) →
(1,4) → (0,4) → (0,3) →
(0,4) → (1,4) → (2,4) →
(3,4) → (4,4) → (4,3) →
(3,3) → (3,2) → (4,2) →
(4,1) → (3,1) → (2,1) →
(1,1) → (1,2) → (0,2) →
(0,1) → (0,0) → (0,1) →
(0,2) → (1,2) → (1,1) →
(1,0) → (2,0) → (3,0) →
(4,0)
30
3
Run
(4,0) → (3,0) → (3,1) →
(4,1) → (4,2) → (3,2) →
(
2,2
)
6
Return
back
(2,2) → (3,2) → (3,3) →
(4,3) → (4,4) → (3,4) →
(2,4) → (1,4) → (0,4) →
(0,3) → (0,4) → (1,4) →
(1,3) → (2,3) → (2,2) →
(3,2) → (4,2) → (4,1) →
(3,1) → (3,0) → (4,0)
20
Table 1 shows that the use of the Trémaux
algorithm in maze exploration did not have the same
results, this is because the Trémaux algorithm was
developed from the Depth First Search algorithm.
Because it is more towards trial error, the Trémaux
algorithm will find a destination but not the shortest
path.
Figure 33: Another maze for the second experiment.
0,0 0,1 0,2 0,3 0,4
1,0 1,1 1,2 1,3 1,4
2,0 2,1 2,2 2,3 2,4
3,0 3,1 3,2 3,3 3,4
4,0 4,1 4,2 4,3 4,4
Figure 34: Coordinate cell and maze arena layout.
ICE-TES 2021 - International Conference on Emerging Issues in Technology, Engineering, and Science
46

The other experiment journey of this robot using
another layout can see table 2. Figure 33 shows
another maze for the second experiment and figure 34
shows the coordinate and maze layout. The robot
journey from starting point to the destination point
has been shown in table 2.
The robot in the second experiment still
prioritized the smallest Trémaux value and if the
Trémaux value was the same, the closest Manhattan
distance value would be used. The results of the
second experiment showed that the robot can choose
the closest route using a combination of the Trémaux
algorithm and the Manhattan distance value.
Combining the Trémaux algorithm with the
Manhattan distance has proven to be better than using
the Trémaux algorithm alone.
Table 2: Second Robot Experiment with another maze
layout.
Routes
Number
of steps
Run
(4,0) → (3,0) → (3,1) → (3,2) →
(3,3) → (2,3) → (2,2)
6
Return
back
(2,2) → (2,3) → (3,3) → (3,2) →
(3,1) → (3,0) → (4,0)
6
This experiment was carried out using a real robot
with a design as shown in Figure 2. Based on all
experiments, the use of infrared sensors has proven to
be effective in detecting obstacles. So, the robot can
explore the maze without any problems.
4 CONCLUSIONS
The design and implementation of robots using the
Trémaux algorithm can run a mobile robot to explore
the maze and map the existing paths. The use of the
Manhattan Distance algorithm can improve the
performance of the Trémaux algorithm to determine
the direction of travel, compared to only using the
Trémaux algorithm.
For further research, the use of the Trémaux
method can be improved by a combination of more
algorithms and also applications in larger mazes. This
research is expected to produce an effective algorithm
to operate in a wide unknown environment.
REFERENCES
Ansari, A., Sayyed, M. A., Ratlamwala, K., & Shaikh, P.
(2015). An Optimized Hybrid Approach for Path
Finding. International Journal in Foundations of
Computer Science & Technology, 5(2), 47–58.
https://doi.org/10.5121/ijfcst.2015.5205
Chu, P. M., Cho, S., Huang, K., & Cho, K. (2019). Flood-
fill-based object segmentation and tracking for
intelligent vehicles. International Journal of Advanced
Robotic Systems, 16(6), 1–11.
https://doi.org/10.1177/1729881419885206
Downey, S., & Charles, D. (2015). Distribution of artificial
intelligence in digital games. International Journal of
Intelligent Information Technologies, 11(3), 1–14.
https://doi.org/10.4018/IJIIT.2015070101
Elshamarka, I., & Bakar Sayuti Saman, A. (2012). Design
and Implementation of a Robot for Maze-Solving using
Flood-Fill Algorithm. International Journal of
Computer Applications, 56(5), 8–13.
https://doi.org/10.5120/8885-2882
Faridi, A. Q., Sharma, S., Shukla, A., Tiwari, R., & Dhar,
J. (2018). Multi-robot multi-target dynamic path
planning using artificial bee colony and evolutionary
programming in unknown environment. Intelligent
Service Robotics, 11(2), 171–186.
https://doi.org/10.1007/s11370-017-0244-7
Hoetama, D. J. O., Putri, F. P., & Winarno, P. M. (2019).
Algoritma Fisher-Yates Shuffle dan Flood Fill sebagai
Maze Generator pada Game Labirin. ULTIMA
Computing, 10(2), 59–64. https://doi.org/10.31937/
sk.v10i2.1064
Jabbar, A. (2016). Autonomous Navigation of Mobile
Robot Based on Flood Fill Algorithm. Iraqi Journal for
Electrical and Electronic Engineering, 12(1), 79–84.
https://doi.org/10.37917/ijeee.12.1.8
Kang, N. K., Son, H. J., & Lee, S. H. (2018). Modified A-
star algorithm for modular plant land transportation.
Journal of Mechanical Science and Technology.
https://doi.org/10.1007/s12206-018-1102-z
Kumar, N., & Kaur, S. (2019). A Review of Various Maze
Solving Algorithms Based on Graph Theory.
International Journal for Scientific Research &
Development, 6(12), 2–6. https://www.researchgate.net/
publication/331481380_A_Review_of_Various_Maze_
Solving_Algorithms_Based_on_Graph_Theory
Reddy, H. (2013). PATH FINDING - Dijkstra’s and A*
Algorithm’s. International Journal in IT and
Engineering, 1–15.
Shen, X., Yi, H., & Wang, J. (2021). Optimization of
picking in the warehouse. Journal of Physics:
Conference Series, 1861(1), 012100.
https://doi.org/10.1088/1742-6596/1861/1/012100
Tjiharjadi, S. (2019). Design and implementation of flood
fill and pledge algorithm for Maze Robot. International
Journal of Mechanical Engineering and Robotics
Research, 8
(4).
https://doi.org/10.18178/ijmerr.8.4.632-638
Tjiharjadi, S., & Setiawan, E. (2016). Design and
implementation of a path finding robot using flood fill
algorithm. International Journal of Mechanical
Engineering and Robotics Research, 5(3).
https://doi.org/10.18178/ijmerr.5.3.180-185
Tjiharjadi, S., Wijaya, M. C., & Setiawan, E. (2017).
Optimization maze robot using A* and flood fill
Design and Implementation of a Path Finding Robot using Modified Trémaux Algorithm
47

algorithm. International Journal of Mechanical
Engineering and Robotics Research, 6(5).
https://doi.org/10.18178/ijmerr.6.5.366-372
Tjiharjadi, Semuil. (2020). Performance comparison robot
path finding uses flood fill - Wall follower algorithm
and flood fill - Pledge algorithm. International Journal
of Mechanical Engineering and Robotics Research,
9(6), 857–864. https://doi.org/10.18178/ijmerr.9.6.857-
864
Yew, N. Z., Tiong, K. M., & Yong, S. T. (2011). Recursive
Path-finding in a Dynamic Maze with Modified
Trémaux Algorithm. Proceedings of International
Conference on Applied Mathematics and Engineering
Mathematics (ICAMEM), 5(12), 845–847.
Zikky, M. (2016). Review of A* (A Star) Navigation Mesh
Pathfinding as the Alternative of Artificial Intelligent
for Ghosts Agent on the Pacman Game. EMITTER
International Journal of Engineering Technology.
https://doi.org/10.24003/emitter.v4i1.117
ICE-TES 2021 - International Conference on Emerging Issues in Technology, Engineering, and Science
48
