
Implementation of Kalman Filter Method in COVID-19 Patients
Monitoring Application based on Bluetooth Low Energy (BLE)
Chika Vevita Novelia
a
, Hani’ah Mahmudah
b
, Aries Pratiarso,
Nur Adi Siswandari, Ari Wijayanti and Okkie Puspitorini
Electronics Engineering Polytechnic Institut of Surabaya, Sukolilo, Surabaya, Indonesia
okkie@pens.ac.id
Keywords: BLE, RSSI, Log Normal Shadowing, Kalman Filter, Monitoring Application.
Abstract: The COVID-19 disease is currently declared to be a global pandemic. Self-quarantining at home is one of the
best solutions proposed to prevent COVID-19 spread and patient monitoring system will be useful for tracking
the patient's position during the implementation of this self-quarantine. The purpose of this paper is to
implement the Kalman Filter method to processing RSSI value from BLE beacons in order to obtain distance
values that resemble the real distance, so it can be used in the COVID-19 patient monitoring application. The
distance will be calculated using the Log Normal Shadowing method and the estimation process will use the
Kalman Filter method to obtain the distance value that is resemble to the real distance. From the test results,
it show that the Kalman Filter method provides a distance value that resemble the actual distance with an error
of 8.7%. While the Kalman Filter method is implemented in the patient monitoring application, it successfully
sends the warning notification with success rate of 94% for patient and 90% for admin. The results show that
the Kalman Filter method is appropriate to be implemented in the COVID-19 patient monitoring application.
1 INTRODUCTION
Coronavirus (COVID-19) is a highly contagious
disease that hit the world in early 2019. This disease
is caused by the SARS-CoV-2 virus (Kementrian
Kesehatan RI, 2020) and was first identified in
Wuhan, the capital of China's Hubei province and
since then COVID-19 has been spread globally and
become a pandemic according to the statement of the
World Health Organization (WHO) (Hui, et al.,
2020). Based on research, it shows that the speed of
transmission of COVID-19 is fast, so preventive
measures are needed. Therefore on February 29 2020,
the Indonesian Government released a disaster
emergency status and promoted social distancing and
self-quarantine movements to break the chain of
transmission (Buana, 2020).
Regulations regarding self-quarantine are
regulated in UU no. 6 of 2018 about Health
Quarantine and there are several kinds of
arrangements regarding quarantine, one of them is
about home quarantine (Sanur, 2020). Home
a
https://orcid.org/0000-0002-0328-4104
b
https://orcid.org/0000-0002-1675-2077
quarantine means that a person is not allowed to leave
the house to do self-isolation. The person in the
category of People Under Monitoring (ODP) or
Patients Under Monitoring (PDP) must quarantine at
home. This quarantine strategy has been used by the
Chinese government previously by requiring people
to stay at home and the Chinese people also support
this policy considering the previous SARS incident,
so the pandemic becomes more controlled (Guo, et
al., 2020).
Currently, the self-quarantine process is carried
out by COVID-19 patients based on the awareness of
the patients themselves without any supervision.
Therefore, to make self-quarantine activities
successful and make the self-quarantine process more
controlled, a monitoring system needs to be
implemented for every patient who is currently doing
self-quarantine in their home.
In a previous study about the Alzheimer's patient
monitoring system using BLE (Bluetooth Low
Energy) (Pratiarso, et al., 2018), the calculation of the
patient's position was using the Log Normal
Novelia, C., Mahmudah, H., Pratiarso, A., Siswandari, N., Wijayanti, A. and Puspitorini, O.
Implementation of Kalman Filter Method in COVID-19 Patients Monitoring Application based on Bluetooth Low Energy (BLE).
DOI: 10.5220/0010956900003260
In Proceedings of the 4th International Conference on Applied Science and Technology on Engineering Science (iCAST-ES 2021), pages 935-941
ISBN: 978-989-758-615-6; ISSN: 2975-8246
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
935

Shadowing method. By considering the power of the
signal sent by the BLE beacon and received by the
Raspberry Pi device as a function of distance in
increments of several grades. Distance data will be
processed using the Kalman Filter method as a noise
filter that can reduce positioning accuracy. When the
patient's distance is less than 10 meters, there will be
a warning notification on the nurse application.
Another similar application is the research about
mapping visitors to the Trowulan Museum with the
purpose of mapping the position of visitors using
BLE (Anggita, et al., 2019).
The weakness of previous research is the use of
BLE beacon and Raspberry Pi that is less user
friendly, compatible, and more expensive because
BLE beacon and Raspberry Pi devices are needed.
While in this study, BLE beacon and smartphone
applications will be used so it will be cheaper and
easier to implement because almost everyone has
smartphone.
The purpose of this paper is to implement the
Kalman Filter method to processing RSSI value from
BLE beacons in order to obtain distance values that
resemble the real distance, so it can be used in the
COVID-19 patient monitoring application. This BLE
beacon has the advantages of being cheap,
lightweight, and does not require external power. The
monitoring application will calculate the distance
from the BLE beacon using the received signal
strength (RSSI) and estimate data with the Kalman
Filter method. The estimated distance data obtained
using the Kalman Filter method is used to run a
warning notification system that will send a warning
notification to the patient's and admin's smartphones
at the specified distance limit.
2 TRACKING METHOD AND
DATA ESTIMATION
2.1 Position Tracking Method
The position tracking method using RSSI values has
been widely used today. To obtain the distance value
from RSSI, the value must be converted using the Log
Normal Shadowing method. The Friis free space
model was used to build the Log Normal Shadowing
method for predicting the presence of severe signal
interference produced by propagation attenuation in
an environmental area. This also demonstrates the
irregularity of the RSSI value (Pratiarso, et al., 2017).
The Log Normal Shadowing equation is needed
because the attenuation of electromagnetic wave
propagation between transmitter and receiver might
impact the signal strength value in a wireless
communication system. The transmission signal
strength generated by the transmitter and received by
the receiver at a reference distance (1 meter) is
assumed to be PRX0 in the Log Normal Shadowing
equation (1), and the received signal strength at a
given distance is PRX, where there is an additional
signal propagation attenuation expressed in Xσ as a
gaussian random distribution variable with zero mean
and standard deviation σ.
−
=−
+ 10
+
(1)
The path loss coefficient in equation (2) for the
observation area is obtained from equation (1).
=
−
(2)
The distance computation based on the detected
signal strength is d, while d0 is a fixed reference
distance of 1 meter. Table 1 shows the variations in
the value of the path loss coefficient n in various
observation areas.
Table 1: Variations in Path Loss Coefficient Values.
Environment n
Free S
p
ace 2
Urban Area 2.7-3.5
Inside Building (LOS) 1.6-1.8
Inside Building (NLOS) 4-6
In a Factor
y
(NLOS) 2-3
The estimated distance d using equation (3)
between the transmitter and the receiver is calculated
after the path loss coefficient value is obtained from
the observation area. It's important to note that the
value of n only applies to the location where the RSSI
data observation/measurement took place at the
moment. A new path loss coefficient value is required
if the RSSI is measured in a different location area.
=
10
(3)
2.2 Kalman Filter Data Estimation
Method
The same problem that IPS (Indoor Positioning
System) devices face all the time is an unstable signal
caused by noise inside the room, which results in
inaccurate measurement data, so it requires the use of
an estimating method such as Kalman Filter.
iCAST-ES 2021 - International Conference on Applied Science and Technology on Engineering Science
936

The Kalman Filter method is a set of mathematical
equations for predicting values using feedback
control form in such a way that minimizes the average
of mean squared error (Gunjal, et al., 2018). This
method is commonly used to estimate the real state
using earlier data that contains noise and other
unreliable elements. This method performs in two
stages, one of which is prediction and the other is
correction (Mackey, et al., 2018). Both of these
procedures run continuously until a time limit is
reached.
Prediction Stage:
=
+
(4)
=
+
(5)
We will look for distance data X
k+1
in the first
stage of prediction as in (4), which are the results of
the estimate distance to the next value based on the
long of k value (time) or the outcomes of the previous
correction stage. Then the error covariance P
k+1
is
calculated in (5), where the result of this error
covariance estimation value is also obtained from the
previous correction stage added with noise
covariance variabel Q
k
. This Q
k
variable has been
determined at the beginning and is obtained through
measurement experiments.
Correction Stage:
=
+
(6)
=
(7)
Measurement update
=
+
−
(8)
=
1−
(9)
The kalman gain value (K
k
), which is the relative
weight of the state is searched in the correction stage
and applied as a multiplier coefficient for the next
estimation result. S
k
is measurement covariance to
obtain the value of the kalman gain (K
k
). In addition
to Q
k
there is a variable R
k
, which is the covariance of
observational noise. The R
k
variable's value is
determined at the begin and obtained through
experiments. Then update the next estimated value
based on the current value y
k
. After updating the
estimate data, the error covariance of the new
estimated value is also updated. For the next
prediction step with new k, the new X
k
and P
k
values
will be applied.
3 PROPOSED TRACKING
SYSTEM
As illustrated in the system block diagram in Figure
1, a system design was applied to monitor the patient's
position based on the patient's distance from BLE in
this research. Patients who are doing self-quarantine
at home will bring an Android smartphone as a
receiving device, according to the system design. This
Android smartphone will come with a monitoring
application that will catch the bluetooth signal from
the BLE installed at the exit door. The signal strength
data called RSSI, will be obtained from the signal
received by the monitoring application and forwarded
to the server to be converted into distance data.
On this server, the conversion is performed using
the Log Normal Shadowing method, then followed by
distance estimation using the Kalman Filter method
to produce more precise distance data. The estimated
distance data obtained using the Kalman Filter
method is used to run the server that will send a
warning notification to the patient's and admin's
smartphones if the patient is detected approaching the
exit door (within 2 meters).
Figure 1: Block Diagram of the System.
3.1 Experimental Setup
The BLE beacon will be placed above the door at a
height of 2 meters from the floor in this experimental
scenario. The BLE beacon was placed above the door
since it is the most strategic and provides LOS
conditions (Line of Sight), that is direct
communication between the BLE beacon
(transmitter) and smartphone (receiver) with no
obstacles. The HM-10 BLE module is the type of
BLE device utilized in this research, as illustrated in
Figure 2, with specifications shown in Table 2.
Implementation of Kalman Filter Method in COVID-19 Patients Monitoring Application based on Bluetooth Low Energy (BLE)
937
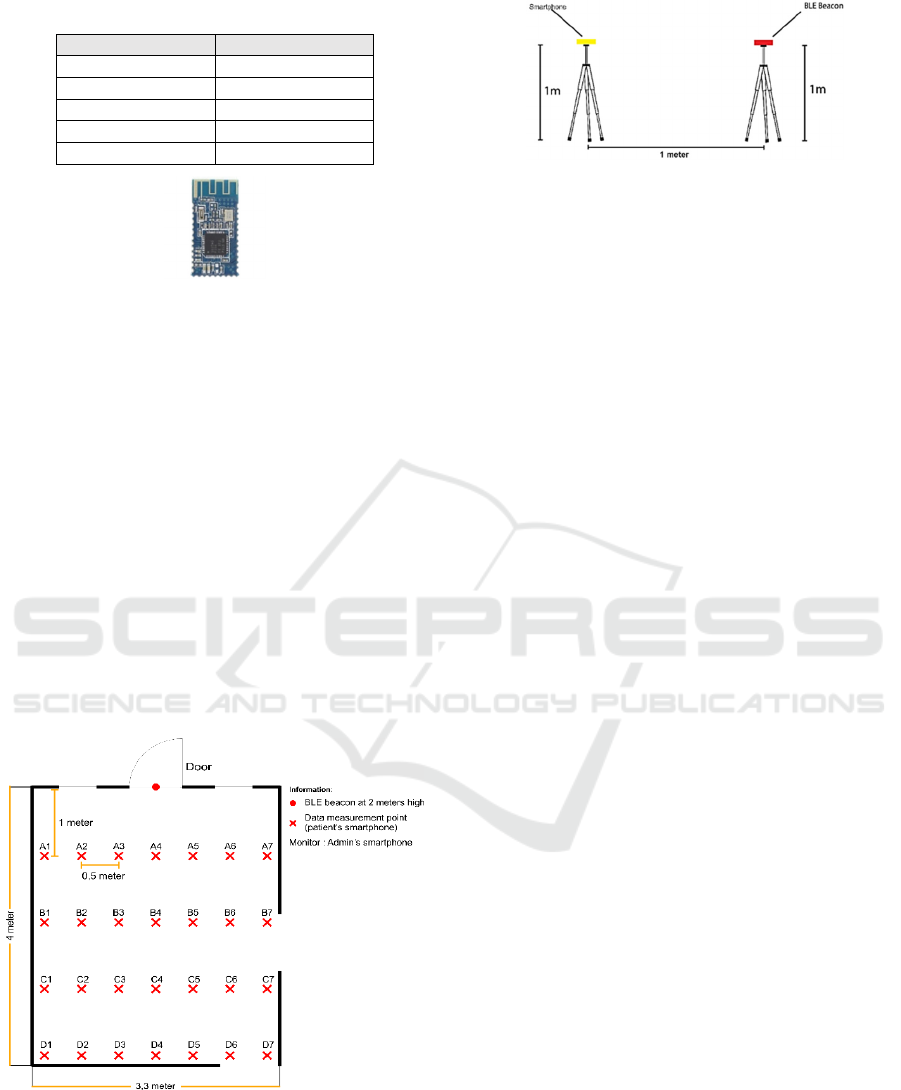
Table 2: Specifications of BLE HM-10.
S
p
ecifications Notation
Protocol V4.0 BLE
Su
pp
l
y
Volta
g
e 2-3.7 Volt
Size (mm) 26.9 x13 x 2.2
Data rate 256 Kb
Batter
y
CR2032
Figure 2: HM-10 BLE Module.
The observation room is a 4 × 3.3 meters area with
LOS conditions (Line of Sight) in Figure 3. BLE acts
as a transmitter, broadcasting the signal at any
particular time. Then the patient's smartphone as
receiver will receive this signal at 28 different
measurement points in the form of RSSI data in
decibels (dBm). These 28 points are labeled as A1 to
D7 and have varying distances to evaluate distance
conversion accuracy all around the observation room.
This RSSI data is used to calculate distance using the
Log Normal Shadowing method, with the P
RX
value
as the result.
In addition to measuring RSSI data (P
RX
) that will
be turned into distance as in equation (3), it is also
important to measure RSSI data at a defined distance
such as 1 meter. Figure 4 illustrate the P
RX0
measurement scenario.
Figure 3: Scenario of RSSI Data Measurement Location.
Figure 4: Illustration of P
RX0
Measurement.
3.2 Design of the Kalman Filter
Method
Kalman Filter method in this system helps to estimate
distance data in order to obtain more precise distance
estimates. Considering that this algorithm
implements the feedback control principle, the
processes that occur will be related and have an
impact to each other. It is important to initialize the
initial value before using the Kalman Filter method.
The variable values in the Kalman Filter system are
defined as follows based on the flowchart in Figure 5.
Because the filter will converge by trusting the
value of x
0
from the start, the amount of kalman gain,
cannot be set to 0. Meanwhile, the values of Q
(process noise covariance) and R (measurement noise
covariance) remain constant, at 1x10
-3
and 100. The
distance data will be predicted and a temporary status
will be obtained using the distance data values
collected earlier in the prediction stage.
The kalman gain value is calculated using the
estimated covariance error P
k
and the measurement
noise covariance P, which is constant at 100.
Calculate the covariance of the new estimation error
P
k
, which will be applied in the next state correction
process in addition to the estimated distance x
k+1
.
Check the number of distance data as n and repeat the
state prediction process, meanwhile if k equals n the
loop ends and a new state x value is created as a result
of the estimation.
4 EVALUATION AND
EXPERIMENTAL RESULT
4.1 Measurement of Path Loss Index
(n)
Measurement of path loss index (n) using the Log
Normal Shadowing equation and the RSSI value
obtained from the results of the RSSI data
measurement scenario, namely the RSSI value (P
RX
),
the RSSI value at a distance of 1 meter (P
RX0
) and the
Gaussian Normal Distribution value (Xσ). From the
iCAST-ES 2021 - International Conference on Applied Science and Technology on Engineering Science
938

calculation of the path loss coefficient (n) obtained
using (2) is shown in table 3 with the value of n is 1.4
and RSSI or Tx power is -80.05 dBm.
Figure 5: Kalman Filter Flowchart.
Table 3: Path Loss Coefficient Average Value.
Position RSSI (dBm) Path Loss Coefficient (n)
A1 -81,09 2,95
A2 -79,92 3,33
A3 -75,63 1,11
A4 -75,23 0,87
A5 -75,51 0,9
A6 -77,2 1,6
A7 -76,59 0,65
B1 -81,21 1,84
B2 -78,58 1,23
B3 -80,27 1,96
B4 -76,65 0,63
B5 -78,14 0,6
B6 -79,32 1,5
B7 -80,31 1,47
C1 -84,14 1,98
C2 -80,27 0,97
C3 -79,92 1
C4 -82,98 1,95
C5 -77,88 0,56
C6 -79,63 0,94
C7 -79,16 0,83
D1 -84,81 1,59
D2 -83,92 1,63
D3 -83,95 1,65
D4 -84,12 1,36
D5 -80,66 0,95
D6 -80,15 0,93
D7 -84,06 1,57
Average n 1,4
The distance calculated using equation (3) and the
path loss coefficient value (n) of 1.4 to convert the
received RSSI value from the measurement at 28
different points resulting the distance shown in Figure
6. The largest gap in calculated distance occurs at
point C5, with a 47.5% estimation error, while the
closest estimate to the actual distance occurs at point
B3, with 12% estimation error.
Figure 6: Comparison of actual distance and calculated
distance of Log Normal Shadowing.
However, the average estimation error obtained
by the Log Normal Shadowing method is still larger
than the allowable standard error of 30.3%, making
the estimation results less reliable.
4.2 Kalman Filter Distance Estimation
Results
The Kalman Filter method is used to perform the
distance estimation process in two stages: prediction
and correction. As displayed in Figure 7, the
estimation of the patient's position is more accurate as
a result of the estimation process. Figure 8 illustrates
the decrease in the percentage of error while
calculating the distance using only the Log Distance
method and after going through the Kalman Filter
method.
The largest estimation gap still occurs at the C5
position, but with a much smaller estimation error of
14.2%, and the smallest estimation error in B3 is just
1.3%. So based on the results, the Kalman Filter
method can provide an accurate distance estimate
with an average error of 8.75%, which is acceptable
because it is less than the permitted standard error of
10%.
Figure 7: Comparison of the actual distance and the
estimated distance of Kalman filter.
Implementation of Kalman Filter Method in COVID-19 Patients Monitoring Application based on Bluetooth Low Energy (BLE)
939
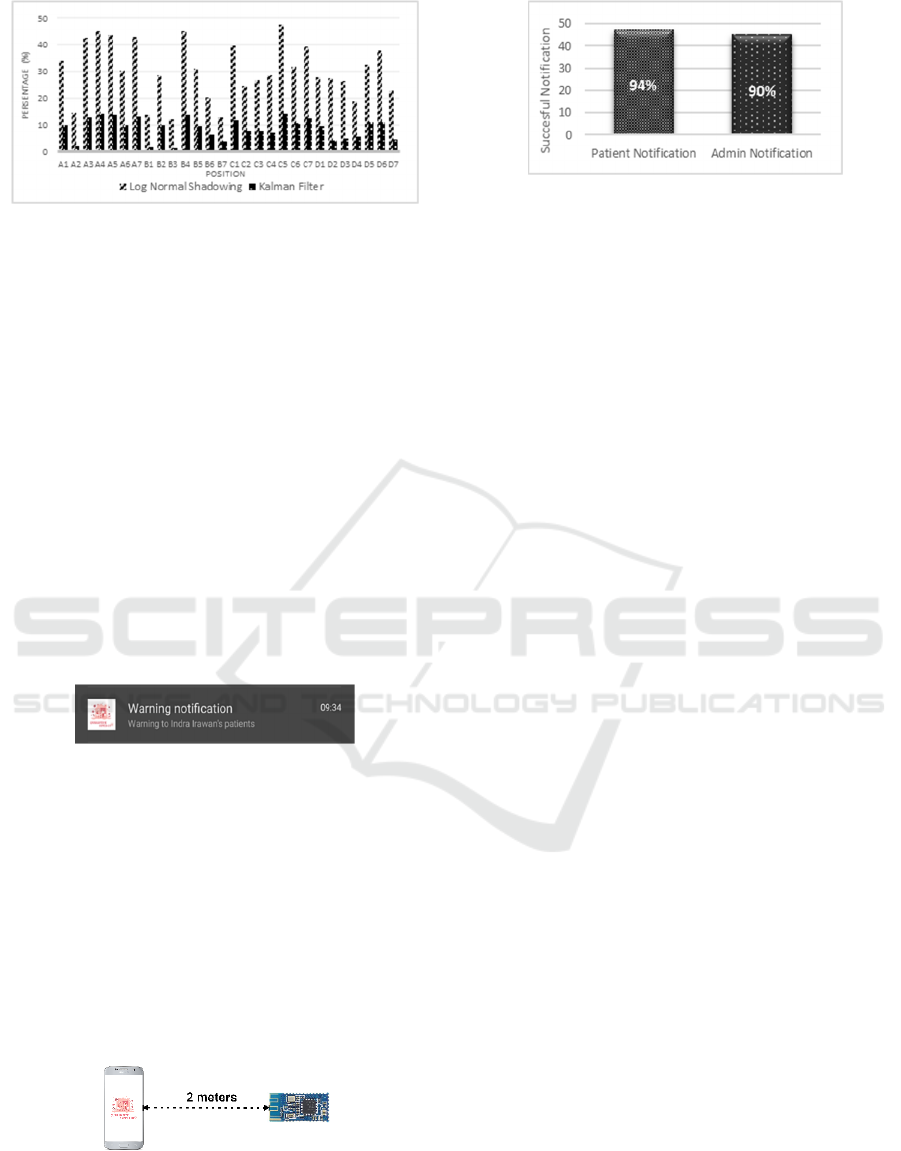
Figure 8: Comparison of the percentage error of Log
Normal Shadowing and Kalman Filter.
4.3 Application Monitoring
The results of distance calculation using Log Normal
Shadowing method with path loss coefficient (n) of
1.4 is resulting an error of 30.3%. After distance
calculation using Log Normal Shadowing method,
this distance data is estimated using Kalman Filter
method so the error decreases to 8.75% and the
distance data becomes more similar to the actual
distance value. This Kalman Filter method is
implemented in the COVID-19 patient monitoring
application based on the results of this distance
calculation to generate more accurate warning
notification system. Warning notification system will
send a notification to the monitoring application when
the patient is less than 2 meters away from BLE.
Figure 9 shows an example of a notification display.
Figure 9: Display of Warning Notification.
A test was conducted using a smartphone and a
BLE beacon at a distance of 2 meters to evaluate the
performance of warning notification system, as
shown in Figure 10. According to the results of the
tests as shown in Figure 11 with a total of 50 tests, the
patient's smartphone received notifications 47 times
with success rate of 94%. While the admin's
smartphone received notifications 45 times with
success rate of 90%. These results show that this
warning notification system is accurate and reliable
because affected by precise distance calculations.
Figure 10: Notification Test Scenario.
Figure 11: Graph of Notification Success Percentage.
5 CONCLUSIONS
In this paper, a system is proposed to implement the
Kalman Filter method to processing RSSI value from
BLE beacons in order to obtain distance values that
resemble the real distance, so it can be used in the
COVID-19 patient monitoring application.
Several results have been obtained from this
study, including distance calculation using the Log
Normal Shadowing method with path loss coefficient
(n) of 1.4 is not accurate enough because the average
error is quite large, that is 30.3%. Distance calculation
using Kalman Filter method can increase the accuracy
from 30.3% without Kalman Filter method to 8.75%
with Kalman Filter method, which is less than the
allowable standard error estimate of 10% (Pratiarso,
et al., 2018). The success rate of the warning
notification system in monitoring application to
sending notifications is 94% for patient and 90% for
admin.
Based on these results, the Kalman Filter method
is appropriate to use in the data estimation process in
monitoring application because it can improve the
accuracy of distance calculations and the success rate
of the warning notification system.
REFERENCES
Anggita, J. K., Handojo, A., & Lim, R. (2019). Aplikasi
Mobile Pemetaan Pengunjung Museum Trowulan
Berbasis Bluetooth Indoor Positioning System
Menggunakan Metode Trilateration. Jurnal INFRA
Petra Christian University, vol. 7, no. 1.
Buana, D. R. (2020). Analisis Perilaku Masyarakat
Indonesia dalam Menghadapi Pandemi Virus Corona
(Covid-19) dan Kiat Menjaga Kesejahteraan Jiwa.
SALAM Jurnal Sosial dan Budaya Syar'i, vol. 7.
Gunjal, P. R., Gunjal, B. R., Shinde, H. A., Vanam, S. M.,
& Aher, S. S. (2018). Moving Object Tracking using
Kalman Filter. IEEE 2018 International Conference On
Advances in Communication and Computing
Technology (ICACCT), pp. 544-547.
iCAST-ES 2021 - International Conference on Applied Science and Technology on Engineering Science
940

Guo, Y., Li, Y., Monroe-Wise, A., Yeung, S.-C. J., &
Huang, Y. (2020). A dynamic residential community-
based quarantine strategy: China’s. Cambridge
University Press Public Health Emergency Collection.
Hui, D. S., Azhar, E. I., Madani, T. A., Ntoumi, F., & Kock,
R. (2020). The continuing 2019-nCoV epidemic threat
of novel coronaviruses to global health — The latest
2019 novel coronavirus outbreak in Wuhan, China. Int
J Infect Dis., vol. 91, pp. 264-266.
Kementrian Kesehatan RI. (2020). Pedoman Pencegahan
dan Pengendalian Coronavirus Disease (COVID-19).
Rev. 4.
Mackey, A., Spachos, P., & Plataniotis, K. N. (2018).
Enhanced Indoor Navigation System with Beacons and
Kalman Filters. IEEE Global Conference on Signal and
Information Processing (GlobalSIP), pp. 947-950.
Pratiarso, A., Imanuddin, A. I., Yuliana, M., Kristalina, P.,
& Astawa, I. G. (2018). mplementation of Kalman
Filter Method for Tracking Position of Alzheimer’s
Patients. Information Technology Information System
and Electrical Engineering (ICITISEE) 2018 3rd
International Conference on, pp. 114-119.
Pratiarso, A., Putra, A. S., Kristalina, P., Sudarsono, A.,
Yuliana, M., & Astawa, I. G. (2017). Skema Lokalisasi
Posisi Node Terdistribusi pada. Jurnal Nasional Teknik
Elektro dan Teknologi Informasi (JNTETI), vol. 6, no.
3, pp. 352-358.
Sanur, D. (2020). Wacana Kebijakan Lockdown dalam
Menghadapi Pandemi Virus Corona (Covid-19). Jurnal
INFO Singkat, vol. XII, No. 6.
Implementation of Kalman Filter Method in COVID-19 Patients Monitoring Application based on Bluetooth Low Energy (BLE)
941
