
Realtime Detection of Masks and Distance in an Effort to Control
Physical Distancing based on Faster R-CNN
Agus Khumaidi, Intan Puspita Sari, Joko Endrasmono and Ryan Yudha Adhitya
Department of Marine Elctrical Engineering, Politeknik Perkapalan Negeri Surabaya, Surabaya, Indonesia
Keywords: Physical Distancing, Distance, Mask, Faster Regional Convolutional Neural Network (Faster R-CNN),
Euclidean Distance, Object Tracking.
Abstract: According to the Circular Letter of the Governor of East Java in 2020 concerning Control, Supervision, and
Law Enforcement in the Implementation of Large-Scale Social Restrictions in East Java in point 1b, it explains
that everyone is required to wear a mask and maintain a distance of at least 1 meter when in outside the home,
while point 2b explains that the person in charge of a restaurant / restaurant / similar business is obliged to
maintain a distance in the queue of at least 1 meter between customers. In this study, The Faster R-CNN
method has been applied to classify objects; people, masks, and no masks. Before the classification process
is carried out, the dataset is collected and trained first. This classification applies to the queuing conditions in
the room. From the results of real-time trials, the success of the model when classifying objects in the form
of masks, no masks, and people has an average success of 92,67% with a safe detection distance of 400 cm.
Based on the tests that have been carried out, the distance calculation using Euclidean Distance produces an
average error of 4,591 % with the largest distance error reaching 7,32 cm.
1 INTRODUCTION
Humans are actually social creatures who always
need the help and presence of others. However, the
COVID-19 Virus requires each individual to wear a
mask and perform Physical Distancing by keeping a
distance of more than 1 meter from anyone to reduce
the risk of spreading the virus.
According to the 2020 East Java Governor's Circular
on Control, Supervision and Law Enforcement in the
Implementation of Large-Scale Social Restrictions in
East Java, point 1b explains that everyone is required
to wear a mask and maintain a distance of at least 1
meter at all times. Outside the home, while point 2b
explains that the person in charge of a restaurant /
similar business is obliged to maintain a distance in
the queue of at least 1 meter between customers.
However, the rules for maintaining a safe distance
and the use of masks are often violated in the
application of Physical Distancing, especially in
crowd locations such as queues at malls and
restaurants(Timur, 2020).
With the background of these problems, the authors
have innovations to overcome Physical Distancing
violations, namely by implementing a Distance
Detection System and Masks as Prevention of
Physical Distancing Violations in Queues Using the
Faster R-CNN Method. This study uses a camera as a
sensor that functions like the human eye. Then used
video processing to detect objects using OpenCV.
With the use of OpenCV, videos can be processed in
real-time and can be classified into several objects
using the Faster R-CNN Method (Salim, 2020). And
can predict the distance between human objects using
the Euclidean Distance measurement method
(Nishom, 2019).
2 METHODOLOGY
2.1 Identification of Problems
In this system, the problem raised is an effort to
reduce violations in Physical Distancing. The purpose
of this research is to reduce the spread and risk of
being exposed to the Covid-19 virus. The problem
formulation of this research is how the system can
detect people and objects using Faster R-CNN and
efficiently estimate the distance between objects
using Euclidean Distance.
1034
Khumaidi, A., Sari, I., Endrasmono, J. and Adhitya, R.
Realtime Detection of Masks and Distance in an Effort to Control Physical Distancing based on Faster R-CNN.
DOI: 10.5220/0010958400003260
In Proceedings of the 4th International Conference on Applied Science and Technology on Engineering Science (iCAST-ES 2021), pages 1034-1038
ISBN: 978-989-758-615-6; ISSN: 2975-8246
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
2.2 Study of Literature
At this stage, the authors seek as much information as
possible about the concepts that will be used in the
study. The search was carried out related to
information about the Convolutional Neural Network
(Adhitya et al., 2020), Faster R-CNN, Centroid
Tracking, Euclidean Distance, OpenCV (Rinanto &
Khumaidi, 2015). It is hoped that this information
will be able to support the completion of this research.
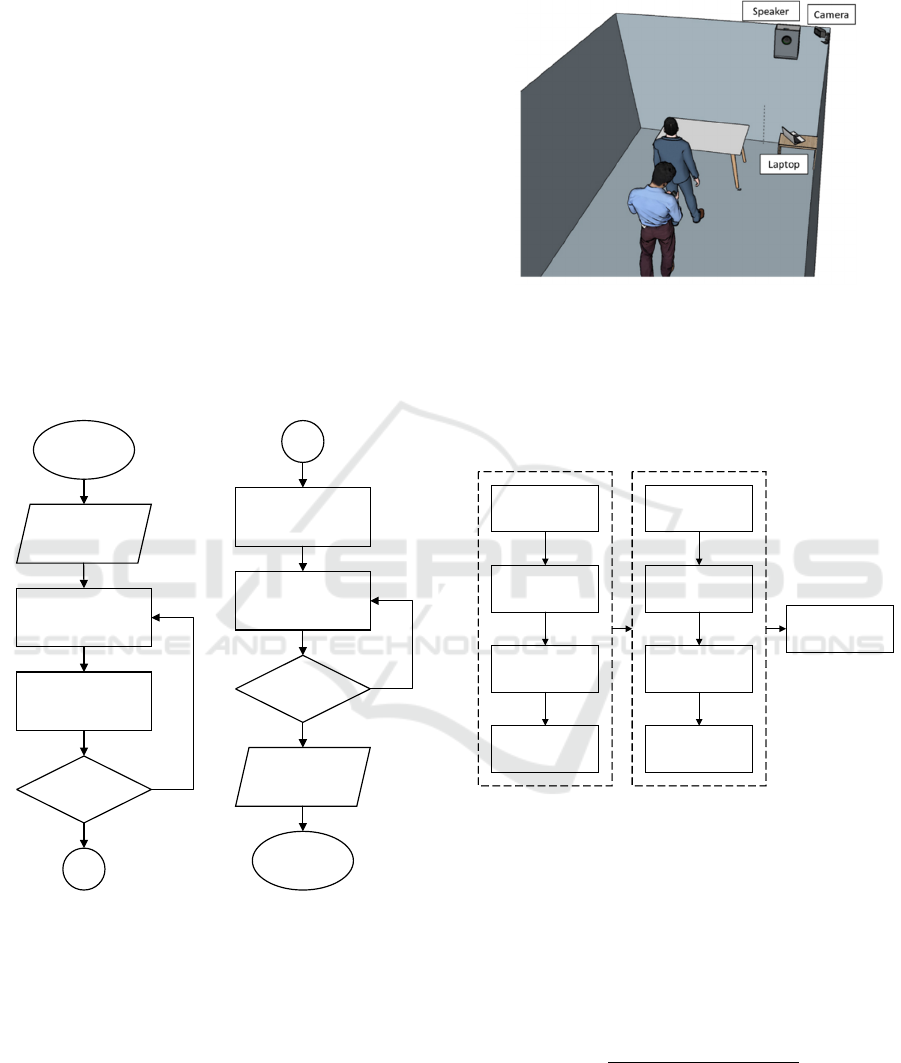
2.3 System Planning
System design is the stage that is used to provide an
overview of the system used in research. This
research uses equipment, namely a notebook with
GPU (Ren et al., 2016), Logitech C922 Pro webcam
with 640 x 480 camera resolution as image input, and
speaker as sound notification output. The system
flowchart in this study is shown in Figure 1.
Figure 1: System Flowchart.
2.4 Hardware Design
Hardware design aims to provide an overview of the
tools used. In Figure 2, is the application of the tool
in the queuing room where humans who are objects
will be detected, webcams that function to capture
images are placed at the position of the upper end of
the room, with the aim of being able to reach a wider
area of a room. If the "people" is too close or there is
a "people" that is not wearing a mask, then the
speaker will issue a sound notification.
Figure 2: Hardware Design.
2.5 Software Design
In this research, the system uses the Faster R-CNN
method. The steps taken to detect objects are as
shown in Figure 3.
Dataset Collection
Labeling Image
(Annotations)
Convert XML to
CSV
Convert CSV to
TFRecord
Pre - Processing
Pre-Processing Data
Training
Inference Graph
Export Model
Training
Testing
Figure 3: Software Design.
2.6 Centroid Euclidean Distance
Centroid and Euclidean Distance are used to
determine the distance between objects by
determining the coordinates of the Centroid value as
shown in Figure 5 from each bounding box in each
frame using equation 1.
(1)
description:
D : Distance resul
t
Video Processing
Process
Is An Object
Detected?
Reading
Webcam
Start
Object Detection
A
No
Yes
A
Perspective
Estimated Distance
Is Keeping the
Distance Safe?
Sound Notifications
On
Finished
No
Yes
Realtime Detection of Masks and Distance in an Effort to Control Physical Distancing based on Faster R-CNN
1035

: Distance x is measured from the distance
measurement based on pixel value
variation
: Distance y is measured from the distance
measurement based on pixel value
variation
3 RESULT
3.1 Dataset
The dataset was obtained from the collection of
photos with the provision of faces using masks,
without masks, and people in a standing position, the
number of datasets used were 1580 images. The
dataset is then converted into an XML file and
divided into 2 parts, namely 80% train data and 20%
test data. Figure 4 is a few samples from the dataset
used.
(A)
(B)
(C)
Figure 4: Dataset Class (A) Mask (B) No Mask (C) People.
3.2 Inference Graph Tensorboard
Tensorboard is used because the neural network is a
process known as a black box, so it cannot be
observed in detail what processes occur in the neural
network system. Training process is carried out until
step 200,000 and generate total loss below 0,015. The
total Loss graph is shown in Figure 5.
Figure 5: Total Loss Graph.
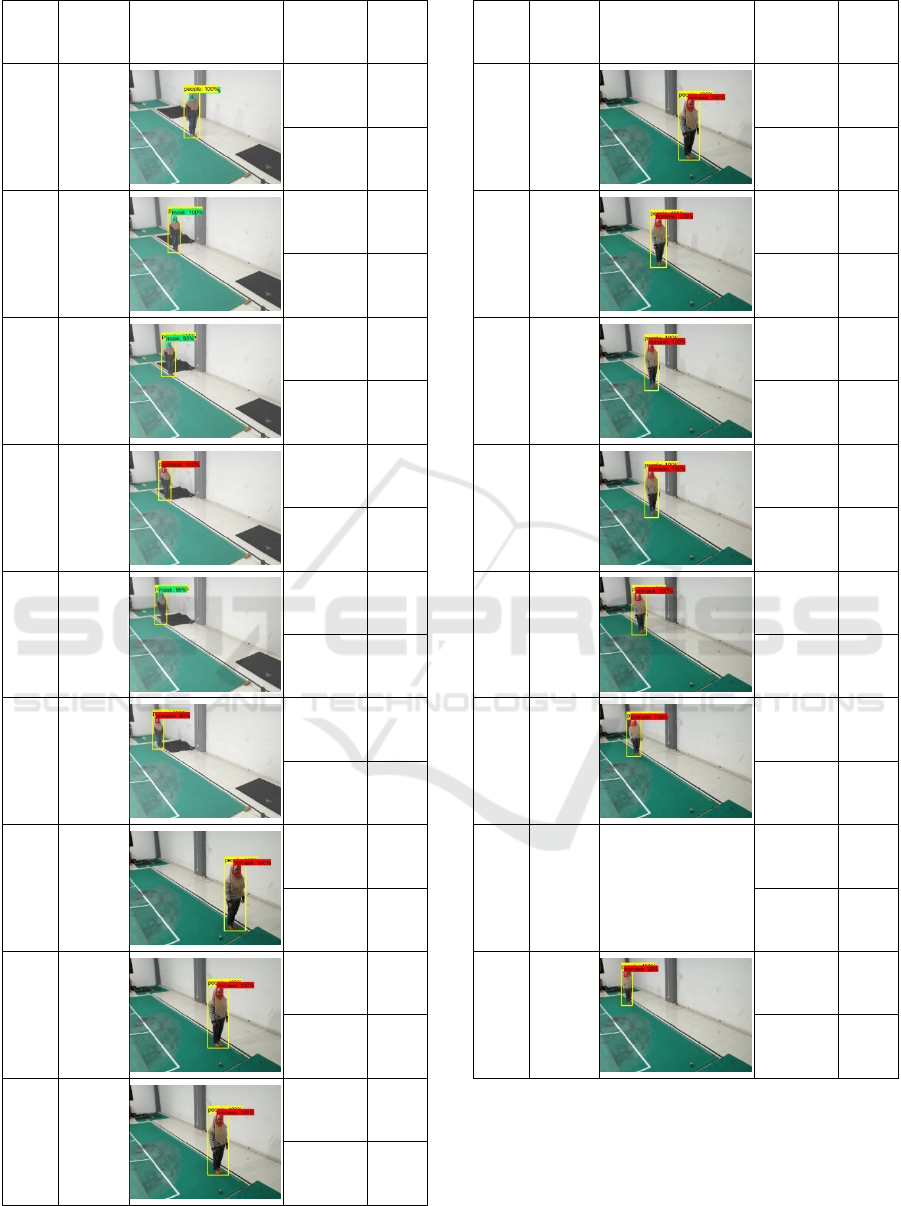
3.3 Testing Object Detection
Detection is divided into 3 according to the
predetermined class, namely Mask, No mask, and
People. The test was carried out with the camera
position being 220 cm from the floor and the first
object at a distance of 347.27 cm from the camera.
Table 1: Testing Object Detection (24 data from 140).
No
Dis-
tance
Prediction Image Results
State
ment
1 0 cm
Mask True
People True
2 50 cm
Mask True
People True
3
100
cm
Mask True
People True
4
150
cm
Mask True
People True
5
200
cm
Mask True
People True
6
250
cm
Mask True
People True
7
300
cm
Mask True
People
True
iCAST-ES 2021 - International Conference on Applied Science and Technology on Engineering Science
1036
No
Dis-
tance
Prediction Image Results
State
ment
8
350
cm
Mask True
People True
9
400
cm
Mask True
People True
10
450
cm
Mask True
People True
11
500
cm
No
mask
False
People True
12
550
cm
Mask True
People True
13
600
cm
No
mask
False
People True
14 0 cm
No
mask
True
People True
15 50 cm
No
mask
True
People True
16
100
cm
No
mask
True
People True
No
Dis-
tance
Prediction Image Results
State
ment
17
150
cm
No
mask
True
People True
18
200
cm
No
mask
True
People True
19
250
cm
No
mask
True
People True
20
300
cm
No
mask
True
People True
21
350
cm
No
mask
True
People True
22
400
cm
No
mask
True
People True
: : :
: :
: :
140
500
cm
No
mask
True
People True
Based on the test data in Table 1 from 140 data,
the percentage of detection success was 92.67%.
3.4 Testing Object Tracking
In object tracking testing, the system can perform
object tracking in the form of object IDs precisely
Realtime Detection of Masks and Distance in an Effort to Control Physical Distancing based on Faster R-CNN
1037
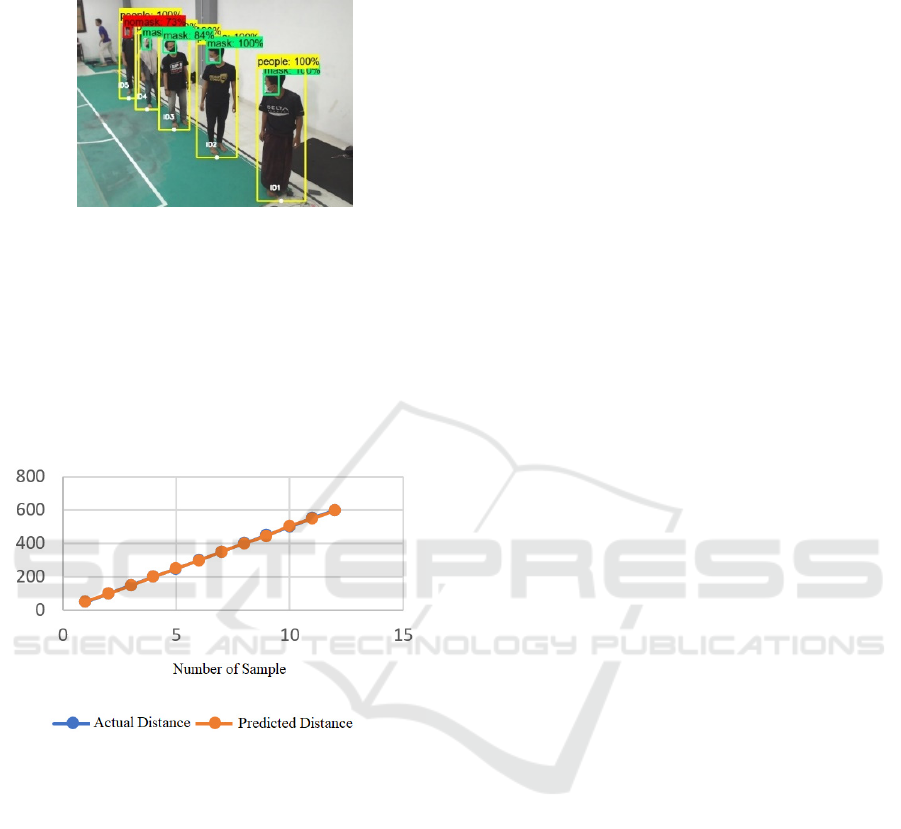
according to the existing queue conditions, the test
results are as shown in Figure 6.
Figure 6: Object Tracking.
3.5 Testing Distance Object
Distance measurement is done using the perspective
model. Then, for distance estimation, Euclidian
Distance calculation is used to get the distance
between "People" objects. Based on the test results as
shown in Figure 7 using 12 distance data, the largest
error is 1.86% with a distance difference of 0.93 cm.
Figure 7: Distance Testing Graph.
4 CONCLUSION
From the testing that has been done, the results of this
research can be concluded that:
1. Based on the test results from 140 data, the
success of the system when classifying objects in
the form of masks, no masks, and people has an
average success of 92.67% with a safe detection
distance of 400 cm.
2. Based on the tests that have been carried out, the
distance calculation using the Euclidean Distance
calculation produces an average error of 4.591 %
with the largest distance error reaching 7.32 cm.
REFERENCES
Adhitya, R. Y., Khumaidi, A., Sarena, S. T., Kautsar, S.,
Widiawan, B., & Afriansyah, F. L. (2020). Applied
Haar Cascade and Convolution Neural Network for
Detecting Defects in the PCB Pathway. CENIM 2020 -
Proceeding: International Conference on Computer
Engineering, Network, and Intelligent Multimedia
2020, Cenim, 408–411.
https://doi.org/10.1109/CENIM51130.2020.9297996
Nishom, M. (2019). Perbandingan Akurasi Euclidean
Distance, Minkowski Distance, dan Manhattan
Distance pada Algoritma K-Means Clustering berbasis
Chi-Square. Jurnal Informatika: Jurnal
Pengembangan IT (JPIT), 4(1), 20–24.
https://doi.org/10.30591/jpit.v4i1.1253
Ren, S., He, K., Girshick, R., & Sun, J. (2016). Faster R-
CNN: Towards Real-Time Object Detection with
Region Proposal Networks. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 39(6),
1137–1149.
https://doi.org/10.1109/TPAMI.2016.2577031
Rinanto, N., & Khumaidi, A. (2015). Aplikasi Android-
Raspberry Pi Pada Kapal Tanpa Awak Untuk Pencarian
Korban Kecelakaan Laut. Jurnal SISFO : Inspirasi
Profesional Sistem Informasi, 05(04).
https://doi.org/10.24089/j.sisfo.2015.09.003
Salim, A. (2020). Estimasi Kecepatan Kendaraan Melalui
Video Pengawas Lalu Lintas Menggunakan Parallel
Line Model.
Timur, G. J. (2020). Surat Edaran Pengendalian,
Pengawasan Dan Penegakan Hukum Dalam
Pelaksanaan Pembatasan Sosial Berskala Besar Di
Jawa Timur. http://files.bpbd.jatimprov.go.id/
KEDARURATAN/COVID19/PRODUK HUKUM
DAN KEBIJAKAN/PEMERINTAH PROVINSI/SE
GUB PSBB.pdf
A. Khumaidi, E. M. Yuniarno and M. H. Purnomo,. (2017).
"Welding defect classification based on convolution
neural network (CNN) and Gaussian kernel," 2017
International Seminar on Intelligent Technology and Its
Applications (ISITIA), Surabaya, 2017, pp. 261-265,
doi: 10.1109/ISITIA.2017.8124091
A. Budianto et al. (2017). "Analysis of artificial intelligence
application using back propagation neural network and
fuzzy logic controller on wall-following autonomous
mobile robot," 2017 International Symposium on
Electronics and Smart Devices (ISESD), Yogyakarta,
pp. 62-66, doi: 10.1109/ISESD.2017.8253306
R. Y. Putra et al.(2016). "Neural network implementation
for invers kinematic model of arm drawing robot," 2016
International Symposium on Electronics and Smart
Devices (ISESD), Bandung, pp. 153-157, doi:
10.1109/ISESD.2016.7886710
S. R. Dewi, (2018). “Deep Learning Object Detection Pada
Video Menggunakan Tensorflow dan Convolutional
Neural Network,”
iCAST-ES 2021 - International Conference on Applied Science and Technology on Engineering Science
1038
