
Multidimensional Echocardiography Image Segmentation using
Deep Learning Convolutional Neural Network
Hasan Imaduddin
1
, Riyanto Sigit
1
and Anhar Risnumawan
2
1
Computer Engineering Division, Politeknik Elektronika Negeri Surabaya, Surabaya, Indonesia
2
Mechatronics Engineering Division, Politeknik Elektronika Negeri Surabaya, Surabaya, Indonesia
Keywords: Echocardiography, Deep Learning, Segmentation, Convolutional Neural Network, Multidimensional.
Abstract: One of the most dangerous diseases that threaten human life is heart disease. One way to analyze heart disease
is by doing echocardiography. Echocardiographic test results can indicate whether the patient's heart is normal
or not by identifying the area of the heart cavity. Therefore, many studies have emerged to analyze the heart.
Therefore I am motivated to develop a system by inputting four points of view of the heart, namely 2
parasternal views (long axis and short axis) and 2 apical views (two chambers and four chambers) with the
aim of this study being able to segment the heart cavity area. This research is part of a large project that aims
to analyze the condition of the heart with 4 input points of view of the heart and the project is divided into
several sections. For this research, it focuses on the process of echocardiographic image segmentation to
obtain images of the heart cavity with 4 input points of view of the heart using the Deep Learning method by
using the VGG-16 and RESNET-18 architecture. The training process is done using 30 epochs with 50
iterations per epoch and 1 batch size so that the total iteration is 7500 iterations. It can be seen that during the
training process, the percentage accuracy is already high, reaching 95% -99%. On the VGG-16 architecture,
it has an average accuracy in each viewpoint of around 83% -93%. The architecture of RESNET-18 has an
average accuracy in every point of view which is around 76% -92%.
1 INTRODUCTION
According to the World Health Organization (WHO),
until 2018 heart disease is still one of the diseases that
causes the most deaths in the world. WHO data in
2015 states that more than 17 million people have
died from heart and blood vessel disease (about 30%
of all deaths in the world), of which the majority or
about 8.7 million are caused by coronary heart
disease. More than 80% of deaths from heart and
blood vessel disease occur in low to moderate income
developing countries. In Indonesia, the results of the
2018 Basic Health Research show that 1.5% or 15 out
of 1,000 Indonesians suffer from coronary heart
disease. Meanwhile, when viewed from the highest
cause of death in Indonesia, the 2014 Sample
Registration System Survey showed 12.9% of deaths
were due to coronary heart disease. By 2030, it is
estimated that the death rate from heart and blood
vessel disease will increase to 23.6 people (WHO,
2019). Therefore, various efforts to anticipate and
treat heart disease have been developed.
Therefore, echocardiography emerged as one of
the non-invasive and painless technologies for
depicting images of the human heart.
Echocardiographers diagnose heart conditions based
on several symptoms that appear on the image. One
example of symptoms is heart wall movement.
Movement of the heart wall can give an indication of
whether the heart is healthy or not. However,
echocardiography has several limitations including
image quality, operator dependency, and interpreter
dependency. These limitations have an impact on the
accuracy of the doctor's diagnosis. The accuracy of a
doctor's diagnosis depends on the doctor's knowledge
and experience.
Echocardiographic videos are used by doctors to
analyze the patient's heart performance.
Echocardiography uses techniques by emitting
ultrasonic waves to determine the size, shape,
function of the heart, and the condition of the heart
valves which are visualized into video images. The
results of the examination on the echocardiography
test can only be read by the doctor so that the analysis
of the condition of the heart cavity depends on the
1250
Imaduddin, H., Sigit, R. and Risnumawan, A.
Multidimensional Echocardiography Image Segmentation using Deep Learning Convolutional Neural Network.
DOI: 10.5220/0010963200003260
In Proceedings of the 4th International Conference on Applied Science and Technology on Engineering Science (iCAST-ES 2021), pages 1250-1254
ISBN: 978-989-758-615-6; ISSN: 2975-8246
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
doctor's accuracy and experience so that it will cause
a different analysis from each doctor in determining
the true condition of the heart..
2 RELATED WORK
Automatic cardiac segmentation using triangle and
optical flow has been done (Sigit et al., 2019). The
proposed method presents a solution for segmentation
of echocardiography image for heart disease. This
research has produced a Median High Boost Filter
which is able to reduce noise and preserve image
information. Segmentation using the triangle
equation method has the smallest error value.
Performance segmentation for the assessment of
cardiac cavity errors obtained an average of 8.18%
triangles, 19.94% snakes, and 15.97% DAS. The
experimental results show that the extended method
is able to detect and improve the image segmentation
of the heart cavity accurately and more quickly.
Improved segmentation of cardiac image using
active shape model has been done (Sigit and Saleh,
2017). The purpose of making this system is to
segment the heart cavity and then calculate its area to
determine the performance of the heart. Pre-
processing to enhance and enhance image quality
using Median Filtering, erosion, and dilation.
Segmentation using Active Shape Model. Then to
calculate the area using Partial Monte Carlo. This
system has an error of 4.309%.
Deep learning, (LeCun et al., 2015), recently has
shown excellent results in image classification and
recognition by, this method started (Krizhevsky et al.,
2012), (Simonyan and Zisserman, 2014) since the win
in ImageNet challenge. Image segmentation (Farabet
et al., 2013), (Graves et al., 2008), (Mohamed et al.,
2011) and object detection (Girshick, 2015),
(Felzenszwalb et al., 2010). Deep learning such as
convolutional neural networks can learn features that
exist in visual input, these features are automatically
trained from a lot of image data called datasets, and
do not need to involve design features created
manually. In this work, using in-depth techniques, we
show that it is possible to solve these problems to
build a multidimensional echocardiographic image
segmentation system that is strong in images.
3 DEEP LEARNING BASED
MULTIDIMENSIONAL
ECHOCARDIOGRAPHY
IMAGE SEGMENTATION
The video generated from the echocardiography
device is converted in the form of images and as input
to the neural network. The network then output the
segmenting label which shows the area of cardiac
cavity.
3.1 Multidimensional
Echocardiography Image
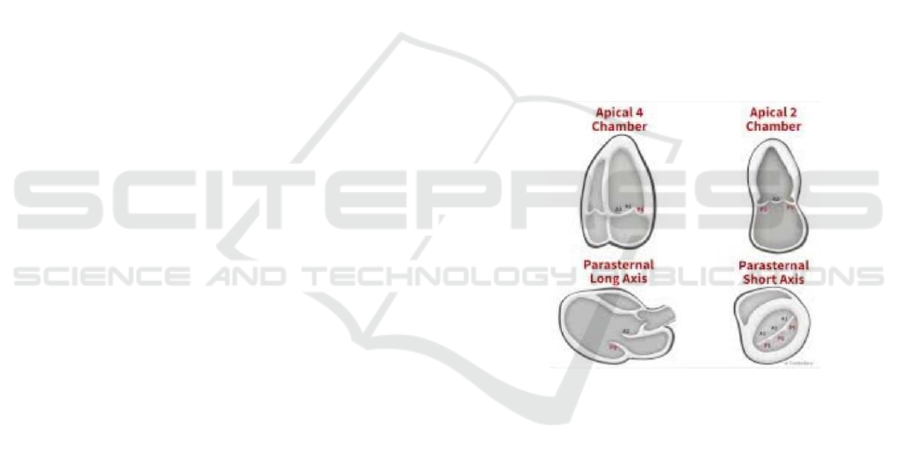
The heart has four chambers. The two receiving
chambers in the superior section are the atrium, while
the two pumping chambers in the inferior part are the
ventricles. In analyzing the heart's performance, there
are several views needed, including a long axis view,
a short axis view, a view of 4 apical spaces and 2
apical spaces.
Figure 1: 4 Viewspoints of Cardiac Cavity.
In this final project will use multi-dimensional
echocardiographic image input from 4 viewpoints of
the heart, namely 2 parasternal views (parasternal
long axis and parasternal short axis) and 2 apical
views (apical two chambers and apical four
chambers) shown in Fig. 1.
3.2 Convolutional Neural Network
Convolutional Neural Networks (CNN) as one of the
methods in deep learning have shown performance as
a prominent approach, which is applied in a variety of
computer vision applications, to learn the effective
features automatically from training data and train
them end-to-end (Krizhevsky et al., 2012).
Basically, CNN consists of several layers that are
staged together. Layers usually consist of
Multidimensional Echocardiography Image Segmentation using Deep Learning Convolutional Neural Network
1251

convolutional, pooling, and fully connected layers
that have different roles. During the forward and
backward training is carried out. For input patches,
the advance stage is carried out at each layer. During
training, after the advanced stage, the output is
compared to the basic truth and the loss is used to do
the backward phase by updating the weight and bias
parameters using a general gradient decrease. After
several iterations, the process can be stopped when
the desired accuracy is achieved. All layer parameters
are updated simultaneously based on training data.
3.3 Semantic Segmentation
Semantic segmentation draws on the task of
classifying each label in an image by connecting each
pixel in the image to the label class (Felzenszwalb et
al., 2010). These labels can be tailored to the needs of
programmers to collect more labels installed in the
label class. Semantic segmentation is very useful to
know the number and location of objects detected,
such as where's the cardiac cavity in muldimetional
echocardiography image to help doctors determine
which cardiac cavity when diagnosing heart disease
patients.
3.4 Training
We did the training step for each one of the four
perspectives from one viewpoint of the heart because
each point of view has different form characteristics,
for that we split the dataset to be divided into 4
different sections (Imaduddin et al., 2016).
We train this network for approximately 2 hours
with maximum 8.000 iterations and validation
accuracy achieve 95 percent on test validations
images, then convert the model to perform
segmentation.
4 EXPERIMENTAL SETUP
System testing is done by running a program on a
computer with specifications processor Intel Core i5-
9400F CPU 2.90GHz, RAM 8GB, GPU NVIDIA
GeForce GTX 1060TI, Operation System Windows
10 Pro 64-bit, run in MATLAB 2019b application
using Convolutional Neural Network deep learning.
Figure 2: System Diagram.
We use a dataset that we collect from hospital.
The dataset we collected in the forms of 4 viewpoints
echocardiography video with various conditions,
sizes, colors, and brightness levels. From various
conditions, we do manual pre-processing by convert
video to several pixels according to the duration of
the video, changing the size of 432x636 pixels (most
original image sizes) to match the input image that
has been prepared. The dataset used was 416-468
RGB images which transferred 60% of training and
40% for testing. We wrote a SegNet Implementation
that is compatible with Matlab GPU using publicly
available optimization library functions. In this work,
we divide it into several steps to make it easier to
understand the workflow of the system that we have
built before segmenting cardiac cavity and classify
them based on training data.
The first steps to doing the pre-processing process
are to prepare the dataset by doing pre-processing
using traditional image processing shown in Fig. 2.
then, determine the number of classes and labels to be
labeled using the Image Labeler in Matlab. And then,
semantic segmentation to take pixel label class
decisions using SegNet Layers and Deep Lab V3 Plus
Layers.
iCAST-ES 2021 - International Conference on Applied Science and Technology on Engineering Science
1252
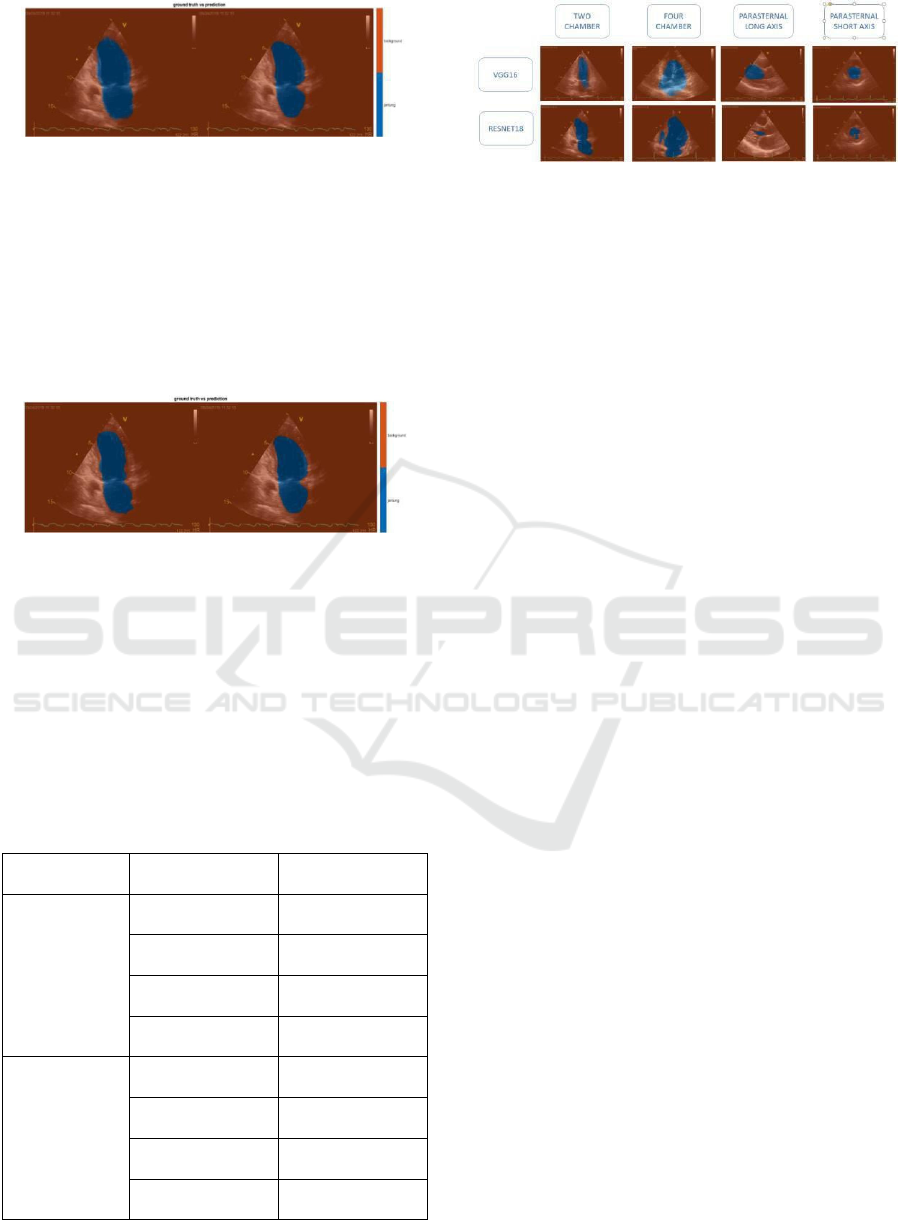
Figure 3: Ground truth vs prediction VGG-16.
It can be seen in Fig. 3. that the comparison
between ground truth and prediction for image testing
from the point of view 2 chambers randomly selected
by the system can detect the location of the heart
cavity by segmenting the area of the heart cavity
using blue with an accuracy of 0.8805 or 88.05%.
This shows that the neural network has been able to
study the heart cavity according to the data provided.
Figure 4: Ground truth vs prediction RESNET-18.
It can be seen in Fig. 4. that the comparison
between ground truth and prediction for image testing
from the point of view 2 chambers randomly selected
by the system can detect the location of the heart
cavity by segmenting the area of the heart cavity
using blue color with an accuracy of 0.7871 or
78.71%. This shows that the neural network has been
able to study the heart cavity according to the data
provided.
Table 1: Mean Accuracy Cnn Architecture Heart Viewpoint.
CNN
Architecture
Heart Viewpoint Mean Accuracy
VGG- 16
2 Chamber
0.9298
4 Chamber
0.9195
Long Axis
0.9388
Short Axis
0.8814
RESN ET-18
2 Chamber
0.8899
4 Chamber
0.9285
Long Axis
0.7616
Short Axis
0.8363
Figure 5: Result of Our Training for 4 Viewpoint using
VGG-16 and RESNET-18.
The average accuracy of each viewpoint of the
heart can be seen in Table I. The long axis viewpoint
has the highest average accuracy rate from the other
four viewpoints, which is 0.9388 and the short axis
viewpoint has the lowest average accuracy level,
which is 0.8814. This is because the VGG-16
architecture is better able to determine the segmented
area at the long axis viewpoint is simpler than the
short axis viewpoint. And also the segmented area at
the long axis viewpoint has a more consistent pattern
than the short axis viewpoint which tends to be more
abstract in the pattern. So that neural networks that
have studied heart cavity patterns following the data
provided more easily recognize objects with simpler
areas because they are not too large and small are
segmented areas shown in Fig. 5.
The average accuracy of each viewpoint of the
heart can be seen in Table I. The 4 chamber view
angle has the highest average accuracy rate from the
other four viewpoints, which is 0.9285 and the long
axis viewpoint has the lowest average accuracy level,
which is 0.7616. This is because the RESNET-18
architecture is better able to determine the segmented
area at the 4 chamber viewpoint is greater than the
long axis viewpoint and also the segmented area at
the 4 chamber viewpoint has a more consistent
pattern than at the long axis viewpoint which tends to
be more vary the pattern. So that neural networks that
have studied heart cavity patterns following the data
provided can more easily recognize objects with
larger areas for segmentation shown in Fig. 5.
5 CONCLUSIONS
The results of the segmentation of the heart cavity in
the VGG-16 architecture have a pattern of
segmentation areas that tend to be the same shape,
while the results of the segmentation of the heart
cavity on the RESNET-18 architecture have a pattern
of segmentation areas that tend to vary in shape. The
results of cardiac cavity segmentation on the VGG-16
architecture have a segmentation area pattern that
Multidimensional Echocardiography Image Segmentation using Deep Learning Convolutional Neural Network
1253

tends to exceed the labeled area, while the results of
cardiac cavity segmentation on the RESNET-18
architecture have a segmentation area pattern that
tends to reduce the area that has been labeled. The
VGG-16 has a higher average accuracy at each point
of view, which is about 83% -93% than the RESNET-
18 architecture with an average accuracy of around
76% -92%. The heart point of view on the VGG-16
architecture which has the highest average accuracy
is the long axis and the lowest in the short axis, while
on the ResNet architecture the highest is 4 chambers
and the lowest in the long axis.
We have presented a multidimensional
echocardiography image segmentation using deep
learning such as a convolutional neural network with
only information from echocardiography image
which is converted from the video are able to solve
the existing problem such as, helps doctors determine
the cardiac cavity when examining cardiac patients
from echocardiography used in Indonesia. Those
existing works that use features that are manually
designed as input to a system to perform
segmentation are seemed rather difficult to
implement in multidimensional echocardiography
image segmentation due to its difference and
uncertain quality video. The parameters were studied
from the training data but the video produced was
based on each echocardiography device in the
hospital and the video taking when the heart
examination was also carried out by people who
sometimes differed from different patients every day
made the video results from echocardiography also
differed in quality. So it seems a little difficult to
implement at this time.
REFERENCES
Sigit, R., Roji, C. A., Harsono, T., & Kuswadi, S. (2019).
Improved echocardiography segmentation using active
shape model and optical flow. TELKOMNIKA
(Telecommunication Computing Electronics and
Control), 17(2), 809-818.
Sigit, R., & Saleh, S. N. (2017, October). Improved
segmentation of cardiac image using active shape
model. In 2017 International Seminar on Application
for Technology of Information and Communication
(iSemantic) (pp. 209-214). IEEE.
LeCun, Y., Bengio, Y., & Hinton, G. (2015). Deep learning.
nature, 521 (7553), 436-444. Google Scholar Google
Scholar Cross Ref Cross Ref.
Krizhevsky, A., Sutskever, I., & Hinton, G. E. (2012).
Imagenet classification with deep convolutional neural
networks. Advances in neural information processing
systems, 25.
Simonyan, K., & Zisserman, A. (2014). Very deep
convolutional networks for large-scale image
recognition. arXiv preprint arXiv:1409.1556.
Farabet, C., Couprie, C., Najman, L., & LeCun, Y. (2012).
Learning hierarchical features for scene labeling. IEEE
transactions on pattern analysis and machine
intelligence, 35(8), 1915-1929.
Graves, A., Liwicki, M., Fernández, S., Bertolami, R.,
Bunke, H., & Schmidhuber, J. (2008). A novel
connectionist system for unconstrained handwriting
recognition. IEEE transactions on pattern analysis and
machine intelligence, 31(5), 855-868.
Mohamed, A. R., Dahl, G. E., & Hinton, G. (2011).
Acoustic modeling using deep belief networks. IEEE
transactions on audio, speech, and language
processing, 20(1), 14-22.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
international conference on computer vision (pp. 1440-
1448).
Girshick, R., Donahue, J., Darrell, T., & Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. In Proceedings of the IEEE
conference on computer vision and pattern recognition
(pp. 580-587).
Girshick, R., Donahue, J., Darrell, T., & Malik, J. (2015).
Region-based convolutional networks for accurate
object detection and segmentation. IEEE transactions
on pattern analysis and machine intelligence, 38(1),
142-158.
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., &
Ramanan, D. (2010). Object detection with
discriminatively trained part-based models. IEEE
transactions on pattern analysis and machine
intelligence, 32(9), 1627-1645.
Imaduddin, H., Anwar, M. K., Perdana, M. I., Sulistijono,
I. A., & Risnumawan, A. (2018, October). Indonesian
vehicle license plate number detection using deep
convolutional neural network. In 2018 International
Electronics Symposium on Knowledge Creation and
Intelligent Computing (IES-KCIC) (pp. 158-163).
IEEE.
World Health Organization (WHO). (2019). The state of
food security and nutrition in the world 2019:
safeguarding against economic slowdowns and
downturns (Vol. 2019). Food & Agriculture Org.
iCAST-ES 2021 - International Conference on Applied Science and Technology on Engineering Science
1254
