
Weakly-supervised Localization of Multiple Objects
in Images using Cosine Loss
Bj
¨
orn Barz
a
and Joachim Denzler
b
Computer Vision Group, Friedrich Schiller University Jena, Jena, Germany
Keywords:
Weakly-supervised Localization, Class Activation Maps, Dense Class Maps, Cosine Loss, Object Detection.
Abstract:
Can we learn to localize objects in images from just image-level class labels? Previous research has shown
that this ability can be added to convolutional neural networks (CNNs) trained for image classification post
hoc without additional cost or effort using so-called class activation maps (CAMs). However, while CAMs
can localize a particular known class in the image quite accurately, they cannot detect and localize instances
of multiple different classes in a single image. This limitation is a consequence of the missing comparability
of prediction scores between classes, which results from training with the cross-entropy loss after a softmax
activation. We find that CNNs trained with the cosine loss instead of cross-entropy do not exhibit this limitation
and propose a variation of CAMs termed Dense Class Maps (DCMs) that fuse predictions for multiple classes
into a coarse semantic segmentation of the scene. Even though the network has only been trained for single-
label classification at the image level, DCMs allow for detecting the presence of multiple objects in an image
and locating them. Our approach outperforms CAMs on the MS COCO object detection dataset by a relative
increase of 27% in mean average precision.
1 INTRODUCTION
Obtaining annotations for object detection tasks is
costly and time-consuming. The largest object de-
tection dataset to date comprises 1.9 million images
with 600 object classes (Kuznetsova et al., 2020) and
the most popular one merely 120,000 images with
80 classes (Lin et al., 2014). Datasets with image-
level class labels, in contrast, are orders of mag-
nitudes larger, containing 9.2 million (Kuznetsova
et al., 2020), 18 million (Wu et al., 2019), or even
300 million images with up to 18,000 classes (Sun
et al., 2017). This scale could be achieved thanks to
semi-automatic acquisition of labeled images through
search engines, which is not possible for bounding
box annotations. However, what if we could learn ob-
ject detection models from image-level class labels?
This task, where the model prediction is more com-
plex than the supervision signal, is known as weakly-
supervised localization (WSL).
Zhou et al. (2016) found that modern convolu-
tional neural network (CNN) classifiers learn this task
a
https://orcid.org/0000-0003-1019-9538
b
https://orcid.org/0000-0002-3193-3300
implicitly and can be augmented with object local-
ization capabilities post hoc without additional train-
ing cost. Modern CNN architectures typically ap-
ply global average pooling between the last convolu-
tional and the fully-connected classification layer (He
et al., 2016). Zhou et al. remove this pooling oper-
ation and apply the weights of the classifier to each
cell of the last convolutional feature map individu-
ally to obtain a so-called class activation map (CAM)
for a certain class of interest, e.g., the one predicted
by the global classifier. However, CAMs for differ-
ent classes are not comparable with each other due to
different ranges of predicted class scores. This is a
consequence of the cross-entropy loss with softmax
activation that is typically used for training.
We show that it becomes possible to generate such
an activation map for all classes that are present in
the image at once instead of only for the top-scoring
class, when the cross-entropy loss is replaced with the
cosine loss during training. This loss function has
previously been used successfully for deep learning
on small data sets (Barz and Denzler, 2020) and for
integrating prior knowledge about the semantic simi-
larity of classes (Barz and Denzler, 2019). The more
homogenous classification scores learned by this ob-
Barz, B. and Denzler, J.
Weakly-supervised Localization of Multiple Objects in Images using Cosine Loss.
DOI: 10.5220/0010760800003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
287-296
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reser ved
287
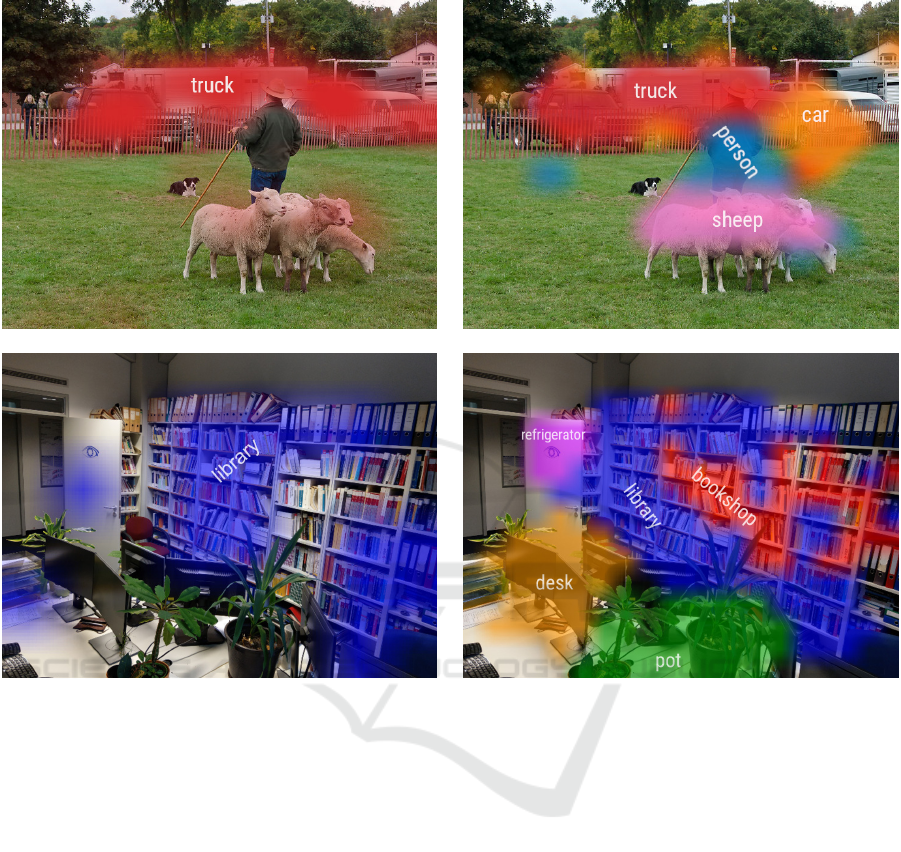
(a) CAM (b) DCM
Figure 1: Exemplary comparison of localization results obtained with CAMs (left) and our DCMs (right). The upper example
is from the MS COCO dataset (Lin et al., 2014) and both ResNet-50 models were trained on cropped instances from COCO.
The lower example shows a photo of our office and uses models trained on ImageNet-1k (Russakovsky et al., 2015).
jective allow us to choose a constant global thresh-
old across all classes for determining whether an ob-
ject is present at each location in the feature map and
what type of object it is. The resulting dense class
map (DCM) resembles a coarse semantic segmenta-
tion. Fig. 1 illustrates this with two examples. Even
though the network has only been trained to assign
a single class label to an entire image as a whole,
it can be modified to locate a variety of objects in a
complex scene. We describe our approach in detail in
Section 3, after briefly reviewing CAMs Section 2.
In Section 4, we present quantitative and qualita-
tive experimental results on the ILSVRC 2012 Local-
ization Challenge (Russakovsky et al., 2015) and the
MS COCO object detection task (Lin et al., 2014).
We find that DCMs match the performance of CAMs
if the image only contains a single dominant object to
be localized, but largely outperform them for detect-
ing multiple objects in a single scene.
Finally, we outline related work in Section 5 and
summarize our conclusions in Section 6.
2 BACKGROUND: CAMS
Class activation maps (CAMs) have been introduced
by Zhou et al. (2016) as a technique for enhanc-
ing a CNN pre-trained for image-level classification
with object localization capabilities after the training.
Since our dence class maps (DCMs) build up on this
approach, we briefly review CAMs in the following.
Let ψ : R
H ×W ×3
→ R
H
0
×W
0
×D
denote a feature
extractor realized by a CNN up to the last convolu-
tional layer. Given an image with height H and width
W , ψ computes a spatial feature map consisting of
H
0
× W
0
local feature vectors of dimensionality D.
Due to pooling, the size of this feature map is typi-
cally only a fraction of the original image size.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
288

In most modern CNN architectures, e.g., ResNet
(He et al., 2016), these local feature cells are averaged
into a single feature vector, which is passed through a
classification layer with weight matrix W ∈ R
C×D
and
bias vector b ∈ R
C
, where C denotes the number of
classes. The resulting class scores are finally mapped
into the space of probability distributions using the
softmax activation function:
softmax(y)
i
:
=
exp(y
i
)
∑
C
j=1
exp(y
j
)
. (1)
Formally, the predicted probabilities for an input im-
age x are obtained as:
f (x) = softmax
W ·
∑
i, j
ψ(x)
i, j
H
0
· W
0
!
+ b
!
. (2)
The key insight of Zhou et al. (2016) is that, due to
linearity, the classifier can also be applied to each lo-
cal feature cell before pooling without changing the
result:
f (x) = softmax
∑
i, j
W · ψ(x)
i, j
+ b
H
0
· W
0
!
. (3)
The predicted global logits are hence the average of
region-wise class scores. These local scores for any
c ∈ {1, . .. ,C} are the class activation map of class c:
CAM(x)
i, j,c
= W
c
· ψ(x)
i, j
+ b
c
. (4)
Even though the classifier has only been trained on
image-wise labels, Zhou et al. (2016) found that the
CAM of the top-scoring class can effectively localize
instances of that class. To this end, they threshold the
CAM by 20% of its maximum and draw a bounding
box around the largest connected component.
3 METHOD
3.1 Cosine Loss
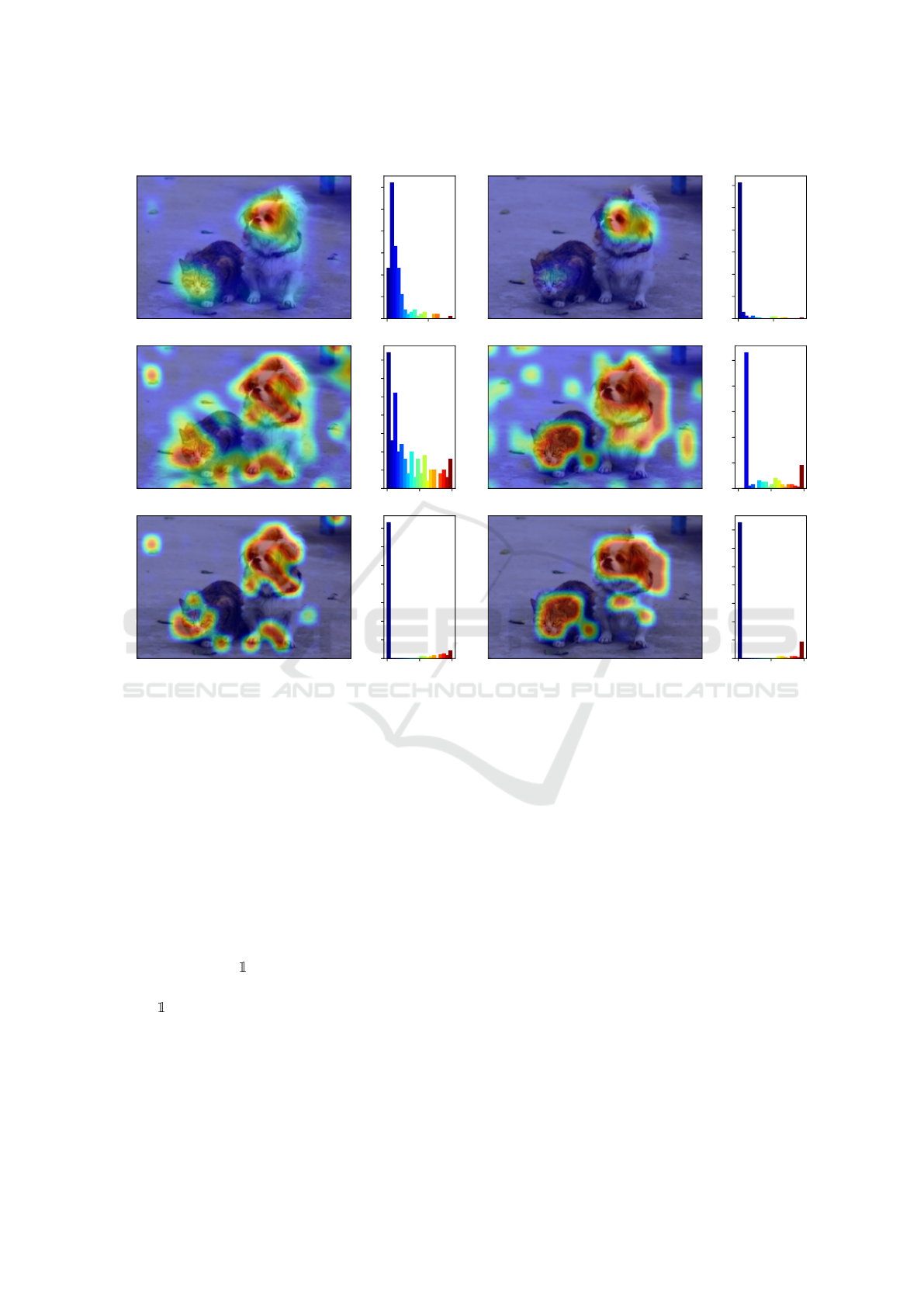
The relative thresholding approach of CAMs hints at
one of their main issues: Before the softmax activa-
tion, the ranges of the CAMs for different classes are
usually not comparable. This complicates setting a
single threshold for deciding whether a certain object
is present at a given location in the image or not (see
Fig. 2a). If the softmax activation would be applied—
which CAMs do not—distinguishing between objects
and noisy background patches became an issue, since
these could reach similarly high activation values due
to the softmax operation (see Figs. 2c and 2e).
These problems do not exist when using the co-
sine loss (Barz and Denzler, 2020) for training, which
enables us to use a single absolute threshold for the si-
multaneous detection of multiple classes instead of a
single one. Instead of the softmax function, the cosine
loss applies L
2
normalization to the feature represen-
tation ˆx ∈ R
D
0
of the input computed by the network
and maximizes its cosine similarity to the embedding
ϕ(c) of the ground-truth class c ∈ {1, . . . ,C}:
L
cos
( ˆx,c)
:
= 1 −
h ˆx, ϕ(c) i
k ˆxk· kϕ(c)k
. (5)
The class embeddings ϕ(c) can be derived from prior
semantic knowledge such as class taxonomies (Barz
and Denzler, 2019), from world knowledge encoded
in large text corpora (Frome et al., 2013), or simply
be one-hot encodings. In the latter case, the cosine
loss maximizes the c-th entry of the prediction vector
after L
2
normalization. Compared to cross-entropy
with softmax, it enforces this channel less strictly to
become 1.
It can be seen in Fig. 2d that foreground and back-
ground are much better separated in the histogram of
maximum class scores after applying the activation.
The L
2
normalization also accounts for making the re-
sponses at different locations comparable by discard-
ing the magnitude of the difference between predicted
features and class embeddings and focusing on their
angle instead.
3.2 Dense Class Maps
Leveraging these advantages of the cosine loss, we
build upon the idea of CAMs and obtain a dense map
of class embeddings DCE : R
H ×W ×3
→ R
H
0
×W
0
×D
0
for an image x ∈ R
H ×W ×3
by removing the global
average pooling layer and converting the embedding
layer with weights W ∈ R
D
0
×D
and biases b ∈ R
D
0
into
a 1 × 1 convolution. The entire procedure is depicted
schematically in Fig. 3.
In contrast to CAMs, which do not apply the soft-
max activation on the local predictions, we apply the
L
2
normalization at each cell of the resulting tensor:
DCE(x)
i, j
=
W · ψ(x)
i, j
+ b
kW · ψ(x)
i, j
+ bk
2
. (6)
Averaging over all locations of the resulting dense
embedding maps is, hence, not equivalent anymore
to the output of the original network.
We can then assign a label class(x, i, j) ∈
{1, . . .,C} to each local cell by finding the class em-
bedding that is most similar to its local feature vector:
sim(x, i, j, c) = h DCE(x)
i, j
, ϕ(c) i, (7a)
class(x, i, j) = argmax
c=1,...,C
sim(x, i, j, c). (7b)
Weakly-supervised Localization of Multiple Objects in Images using Cosine Loss
289
(a)
Before Activation
Trained with Cross-Entropy
0 50
0
10
20
30
40
50
60
(b)
Trained with Cosine Loss
0 100
0
25
50
75
100
125
150
(c)
After Activation
0.0 0.5 1.0
0
5
10
15
20
25
30
35
(d)
0.0 0.5 1.0
0
20
40
60
80
100
(e)
After Thresholding
0.0 0.5 1.0
0
20
40
60
80
100
120
140
(f)
0.0 0.5 1.0
0
20
40
60
80
100
120
140
Figure 2: Heatmaps and histograms of the maximum value over all classes at each cell of a DCM, before and after the
activation. The activation function is softmax for the cross-entropy loss and L
2
normalization for the cosine loss. The hyper-
parameters for thresholding are ϑ
cls
= 0.8, ϑ
sim
= 0.5.
However, many of these cells will contain back-
ground, such that assigning an object class to them
is not reasonable and the results will be noisy. Thus,
we first determine a set C(x) ⊆ {1, . . . ,C} of classes
that are present in the image by assigning a score to
each class and selecting those classes whose score
is greater than a certain threshold ϑ
cls
∈ [0, 1], i.e.,
C(x) = {c ∈ {1, .. . ,C}|score(x, c) > ϑ
cls
}. The score
for a given class is defined as the maximum cosine
similarity to its class embedding over all locations to
which this class has been assigned:
score(x, c) = max
i, j
{class(x,i, j)=c}
· sim(x, i, j, c), (8)
where
{·}
is the indicator function, being one if the
argument evaluates to true and zero otherwise. This
scoring procedure is different from simply selecting
the globally top-scoring classes, since two related
classes could obtain high scores at identical positions.
With our approach, only the highest-scoring of such
overlapping classes will be selected.
For finding the locations where the selected
classes are present, we threshold their cosine simi-
larity with a second threshold ϑ
sim
≤ ϑ
cls
to obtain
a dense class map DCM(x, i, j) ∈ {0, 1, . . . ,C}, where
0 denotes the background class:
DCM(x, i, j) =
class(x, i, j) if class(x, i, j) ∈ C and
sim(x, i, j, class(x, i, j)) > ϑ
sim
,
0 else.
(9)
An example of the similarity scores corresponding to
the resulting class maps after this two-stage thresh-
olding procedure—first across classes, then across
locations—is given in Fig. 2f. The actual output that
is relevant for practical use, however, is the hard as-
signment of locations to classes given by the DCM.
This can be visualized by color-coding classes as done
in Fig. 1.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
290

Figure 3: Schematic illustration of the pipeline for computing a dense class map.
3.3 Implementation Details
While training images annotated with a single class
usually show a close-up of the object of interest,
we are interested in analyzing more complex scenes
where the objects are smaller. Thus, we use a higher
input image resolution for generating DCMs than the
resolution typically used for training the network,
which usually is 224 × 224 for a ResNet trained on
ImageNet (He et al., 2016). For dense classification,
we resize the input images so that their larger side is
640 pixels wide.
It is worth noting that the resolution of the fea-
ture map obtained from the last convolutional layer,
and hence the resolution of the DCM as well, is rather
coarse. In the case of the ResNet-50 architecture, the
dimensions of the DCM are
1
32
of the original image
dimensions. For visualization purposes, we upsample
the DCM and all heatmaps to the size of the image
using bicubic interpolation, which results in a rather
blurry semantic segmentation.
For generating bounding boxes instead of segmen-
tations, we generate one box for each class in C fol-
lowing the approach of Zhou et al. (2016): The simi-
larity map sim(x, ·, ·, c) for class c ∈ C is thresholded
with ϑ
bbox
· max
i, j
sim(x, i, j, c), where ϑ
bbox
∈ [0, 1],
and a box is drawn around the largest connected com-
ponent.
4 EXPERIMENTS
We evaluate our DCM approach in comparison to
CAMs in two settings: First, we conduct WSL on
the ImageNet-1k dataset (Russakovsky et al., 2015),
which mainly comprises images showing a single
dominant object and provides a single class label and
corresponding bounding box per image. This exper-
iment serves as a verification that DCMs do not per-
form worse than CAMs in this restricted setting, in
which CAMs typically operate. Second, we use the
MS COCO dataset (Lin et al., 2014), an established
benchmark for object detection, for evaluating both
approaches in a more realistic setting where multiple
different classes are present in a single image.
4.1 Semantic Information
As mentioned in Section 3.1, using the cosine loss for
training allows for straightforward integration of prior
knowledge in the form of semantic class embeddings.
In addition to one-hot encodings, we evaluate DCMs
on networks trained with the hierarchy-based seman-
tic embeddings proposed by Barz and Denzler (2019).
These embeddings are constructed so that their pair-
wise cosine similarity equals a semantic similarity
measure derived from a class taxonomy.
To obtain such a taxonomy covering the 80 classes
of MS COCO, we map them manually to matching
synsets from the WordNet ontology (Fellbaum, 1998).
However, the WordNet graph is not a tree, because
some concepts have multiple parent nodes. Thus, we
prune the subgraph of WordNet in question to a tree
using the approach of Redmon and Farhadi (2017):
We start with a tree consisting of the paths from the
root to all classes from MS COCO which have only
one such root path. Then, the remaining classes are
added successively by choosing that path among their
several root paths that results in the least number of
nodes added to the existing tree.
Weakly-supervised Localization of Multiple Objects in Images using Cosine Loss
291

4.2 Training Details
For all our experiments, we train a ResNet-50 (He
et al., 2016) using stochastic gradient descent with
a cyclic learning rate schedule with warm restarts
(Loshchilov and Hutter, 2017). The base cycle length
is 12 epochs and is doubled after each cycle. We
use five cycles, amounting to a total of 372 training
epochs. The base learning rate is 0.1.
For training on ImageNet-1k, the model is initial-
ized with random weights. These pre-trained weights
are used as initialization for training on MS COCO.
Since our training objective is single-label classi-
fication but images in MS COCO typically contain
multiple objects, we extract crops of each individual
object using the provided bounding box annotations,
ignoring small objects whose bounding box is smaller
than 32 pixels in both dimensions. As a result, we ob-
tain 684,070 training images of object instances.
To present the CNN with objects of various scales
as well as truncated objects during training, we re-
size the training images by choosing the target size of
their smaller side from [256, 480] at random and ex-
tract a square crop of size 224×224. We furthermore
use random horizontal flipping and random erasing
(Zhong et al., 2017) as data augmentation.
4.3 WSL on ImageNet-1k
As a sanity check, we first evaluate the localization
performance of DCMs on the easier task of locating
a single predominant object in an image using the
ImageNet-1k dataset. Following the evaluation pro-
tocol defined for the ImageNet Large Scale Recogni-
tion Challenge (ILSVRC) 2012 (Russakovsky et al.,
2015), we assess performance in terms of the average
top-5 localization error. For a single image, the er-
ror is 0 if at least one of the top-5 predicted bounding
boxes belongs to the object class assigned to the im-
age and has at least 50% overlap with the ground-truth
bounding box of that object. Otherwise, the error is 1.
We obtain the same top-5 localization error of
48% with both CAMs applied to a CNN trained
with cross-entropy and with DCMs applied to a
CNN trained with the cosine loss and one-hot encod-
ings. For CAMs, this performance was obtained with
ϑ
bbox
= 0.2, while we used ϑ
bbox
= 0.06 for DCMs.
Zhou et al. (2016) used different network architec-
tures for their CAM experiments, but the performance
reported by them is similar.
Thus, both approaches perform equally well on
the object localization task of ILSVRC 2012. This
was expected, since ILSVRC is easy in this regard.
Most images contain only a single object, which often
even fills a large part of the image. Detecting multi-
ple objects from different classes and of smaller size
is hence not necessary in this scenario.
4.4 WSL on MS COCO
4.4.1 Evaluation Metric
The MS COCO dataset poses a much more diffi-
cult challenge for WSL by presenting a real detec-
tion task. Performance is hence typically evaluated
in terms of mean average precision (mAP). COCO
uses an average over 20 mAP values with differ-
ent intersection-over-union (IoU) thresholds varying
from 50% to 95%. In this work, however, we are
not dealing with a fully supervised scenario and the
WSL methods never see ideal bounding boxes during
training. Therefore, the predicted bounding box can
in many cases be much smaller than the ground-truth
bounding box if only a single characteristic part of the
object is used for the classification decision (e.g., only
the head of a dog instead of the entire body). On the
other hand, it can also be larger if many objects of the
same class stand close together.
These predictions can, however, still be helpful for
determining which objects are located where in the
image, even if the localization is not highly accurate.
Therefore, we report mAP with a more relaxed IoU
threshold of 25%. In addition, we also compute mAP
with an IoU threshold of 0%, which does not require
any overlap with the ground-truth bounding box at all
and hence evaluates multi-label classification perfor-
mance, where we are only interested in which objects
are present in the image, but not where they are.
4.4.2 Bounding Box Hyper-parameters
Since average precision summarizes the performance
of a detector over all possible detection thresholds, we
do not need to fix the class score threshold ϑ
cls
for this
experiment. The bounding box generation threshold,
on the other hand, is tuned on the uncropped train-
ing set individually for each method and then applied
on the test set for the final performance evaluation.
This results in ϑ
bbox
= 0.25 for CAMs, ϑ
bbox
= 0.3
for DCMs with one-hot encodings, and ϑ
bbox
= 0.75
for DCMs with semantic class embeddings. The com-
paratively high threshold in the latter case has an in-
tuitive explanation, since different objects are consid-
ered more similar to each other on average with se-
mantic embeddings than with one-hot encodings, re-
quiring a higher threshold to prevent over-detection.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
292
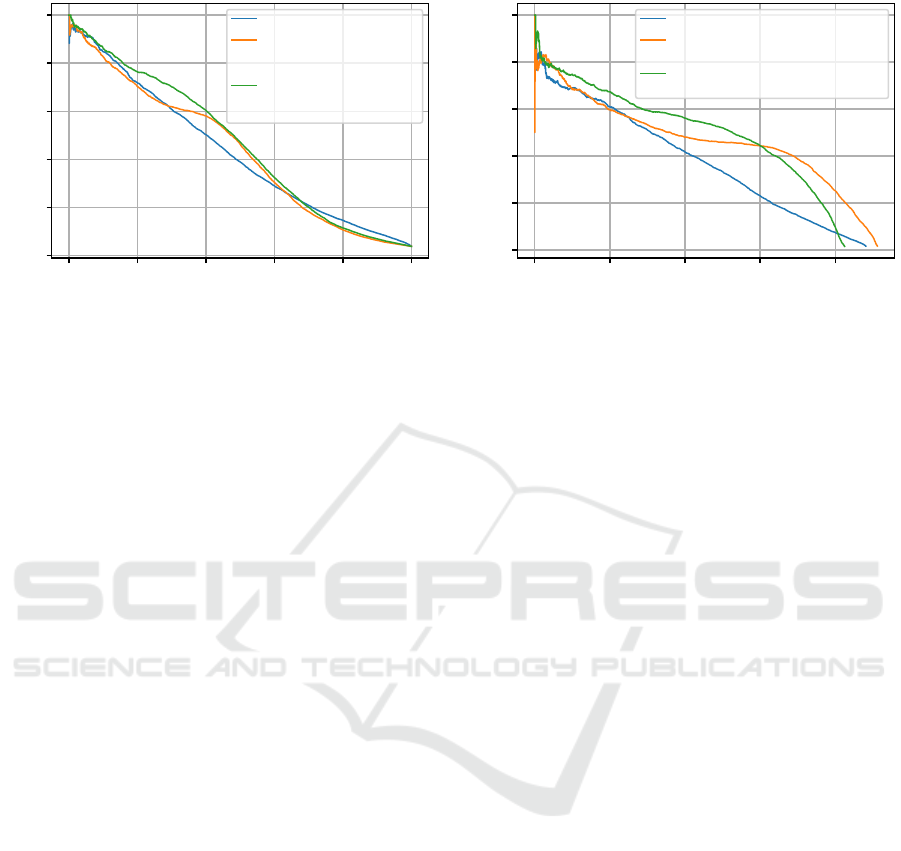
(a) IoU threshold 0%
0.0 0.2 0.4 0.6 0.8 1.0
Recall
0.0
0.2
0.4
0.6
0.8
1.0
Precision
Cross-Entropy [AP: 43.0%]
Cosine Loss + One-hot
Encodings + DCM
[AP: 43.3%]
Cosine Loss + Semantic
Embeddings + DCM
[AP: 46.1%]
(b) IoU threshold 25%
0.0 0.1 0.2 0.3 0.4
Recall
0.0
0.2
0.4
0.6
0.8
1.0
Precision
Cross-Entropy + CAM [AP: 17.0%]
Cosine Loss + One-hot Encodings
+ DCM [AP: 21.6%]
Cosine Loss + Semantic Embeddings
+ DCM [AP: 21.8%]
Figure 4: Precision-recall curves for CAMs and DCMs on MS COCO with IoU thresholds of 0% and 25%.
4.4.3 Results
Precision-recall curves and the mAP obtained on the
test set are presented in Fig. 4. First, it can be seen that
even for the task of multi-label classification with-
out localization (Fig. 4a), the cosine loss combined
with DCMs improves mAP slightly compared to net-
works trained with cross-entropy (43.3% vs. 43.0%).
Apparently, suppressing non-maximum class predic-
tions at identical locations—as done by DCMs—
helps avoiding false positive predictions. Integrating
prior semantic knowledge in the form of hierarchy-
based class embeddings improves mAP much further
by three percent points.
The differences are more pronounced, though, in
an actual object detection setting, as can be seen in
Fig. 4b. Using the cosine loss and DCMs allows for
maintaining a much higher precision when lowering
the detection threshold: For a recall level of 30%, the
precision of DCMs with semantic embeddings or one-
hot encodings is still 44%, while CAMs applied to
a CNN trained with cross-entropy only obtain 23%
precision at this level of recall.
As before, semantic embeddings surpass one-hot
encodings. They do not obtain the same maximum
recall, but provide better precision, i.e., less false pos-
itives, for most recall levels. But even without se-
mantic embeddings, DCMs outperform CAMs by a
relative increase of 27% mAP.
4.5 Qualitative Examples
Two qualitative examples comparing CAMs and
DCMs on ImageNet-1k and MS COCO are shown in
Fig. 1. Further examples from MS COCO including
bounding boxes are presented in Fig. 5.
For CAMs, we consider all classes with a pre-
dicted probability of at least 15% to be present in
the image, since second-best predictions often have
low scores due to the softmax operation. Regarding
DCMs, we want to select only those classes whose
embeddings are highly similar to at least one local
feature and hence use the threshold ϑ
cls
= 0.99. To
obtain the coarse semantic segmentations, we set the
threshold applied to the similarity maps of selected
classes equal to the one used for bounding box gen-
eration, i.e., ϑ
sim
= ϑ
bbox
, using the bounding box
thresholds given above.
The first example in Fig. 5 shows an image com-
prising objects from two different classes. CAMs are
only able to detect one of these correctly due to the
strong decision enforced by the softmax activation.
The use of the cosine loss and DCMs, on the other
hand, allows us to detect both objects in the image us-
ing a global threshold across all classes based on the
cosine similarity between the predicted features and
the class embeddings.
Additionally, integrating prior knowledge about
the similarity between classes and hence not forcing
the network to consider cars and trucks as two com-
pletely different things allows the DCM to also pro-
vide the correct prediction “car” along with “truck”,
even though the latter has a slightly higher score.
Thanks to semantic embeddings, both classes can
have high scores simultaneously, since they are se-
mantically similar. Due to the reduced competition
between them, not only “truck” exceeds the threshold
ϑ
cls
, but “car” can do so too.
The second example shows a more complex scene,
where DCMs, especially with semantic embeddings,
are able to detect substantially more objects than
CAMs. They do not only detect the train and the
bench but also the bicycle, the table, and the person.
Weakly-supervised Localization of Multiple Objects in Images using Cosine Loss
293

(a) DCM (one-hot) (b) DCM (semantic) (c) CAM
Figure 5: Qualitative examples from MS COCO with bounding boxes.
5 RELATED WORK
5.1 Class Activation Maps
The applicability of CAMs is restricted by design to
CNN architectures with global average pooling fol-
lowed by a single classification layer. Grad-CAM
(Selvaraju et al., 2017) is a generalization of CAMs,
which determines weights for the different channels
of the convolutional feature map based on the gradient
of the network output with respect to the activations
in each channel. This allows for obtaining activation
maps for arbitrary CNN architectures as well as net-
works trained for a task different from classification,
such as image captioning or question answering.
Gradient-based methods exhibit some drawbacks,
though, such as being strongly influenced by the input
image and less sensitive to the actual model (Adebayo
et al., 2018). Desai and Ramaswamy (2020) avoid
these issues by proposing a gradient-free variant of
CAMs based on an ablation procedure. This so-called
Ablation-CAM determines the weights for the feature
channels based on the change of the model output if
this channel would be set to zero.
These modifications of the original CAM tech-
nique make it more widely applicable to different
types of models but do not entail significant advan-
tages over the localization performance of CAMs for
ResNet-like classifiers. Most notably, they do not ad-
dress the limitation of not being able to detect more
than one class per image, which we focus on.
5.2 Weakly-supervised Localization
Other common issues of CAMs are under- and over-
detection: For some classes, CAMs focus only on the
most salient parts of the object and ignore the rest,
e.g., the heads of persons instead of their body, result-
ing in too small bounding boxes. Concerning certain
other classes such as trains, for example, the classi-
fier often considers context features like rails to be
indicative of the object, such that they are mistakenly
included in the bounding box.
The latter problem is tackled by soft proposal net-
works (SPNs) (Zhu et al., 2017), which mask the com-
puted feature map with soft objectness scores that
are obtained by a random walk on a fully-connected
graph over all cells of the feature map. The edge
weights of the graph depend on feature differences
and spatial distance, such that high objectness scores
are assigned to cells that are highly different from
their neighbors. These masks are intended to cast a
spotlight onto the actual object, reducing the influence
of the context. Since the object proposals depend di-
rectly on the feature map itself, they are trained jointly
with the network.
To mitigate the problem of under-detection, Du-
rand et al. (2017) learn and average multiple CAMs
per class. While they intend these maps to high-
light different object parts such as heads, legs etc.,
this property is not explicitly enforced. Zhang et al.
(2018) employ a two-branch classifier and use the
CAM obtained from the first classifier to erase the
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
294

respective object parts from the feature map before
passing it through the second classifier, so that this
one is forced to focus on different characteristic fea-
tures of the object. At inference time, the two CAMs
are aggregated by taking the element-wise maximum.
As opposed to these approaches, which modify
the network architecture with the goal of improving
the localization accuracy of CAMs, we do not explic-
itly aim for improving the state of the art in WSL of
single objects. In fact, a recent study found that no
WSL method proposed after CAMs actually outper-
form them in a realistic setting for segmenting images
into foreground and background (Choe et al., 2020).
In our work, we extend the WSL approach in-
spired by CAMs for detecting multiple classes at once
without needing to tailor the network architecture or
learning process to this task. Instead, we find that
the simple change of the loss function to the cosine
loss for classifier pre-training facilitates generating a
joint activation map for all classes present in the im-
age without additional cost.
5.3 Cosine Loss
The cosine loss mainly enjoys popularity in the area
of multi-modal representation learning and cross-
modal retrieval (Sudholt and Fink, 2017; Salvador
et al., 2017), where it is used for maximizing the
similarity between embeddings of two related sam-
ples from different modalities (e.g., images and cap-
tions). Similar to aligning representations for differ-
ent modalities, it has also proven useful for match-
ing learned image representations with semantic class
embeddings for semantic image retrieval (Barz and
Denzler, 2019). Qin et al. (2008) furthermore used the
cosine loss for a list-wise learning to rank approach,
where a vector of predicted ranking scores is com-
pared to a vector of ground-truth scores using the co-
sine similarity.
Barz and Denzler (2020) recently proposed to
employ the cosine loss for classification either as a
replacement for or in combination with the cross-
entropy loss. They found that the L
2
normalization
applied by the cosine loss acts as a useful regularizer
that improves the classification performance when
few training data is available. We follow their work in
the sense that we also train CNN classifiers using the
cosine loss, but we study the properties of the learned
representations from a different perspective, i.e., their
advantages for weakly-supervised localization.
6 CONCLUSIONS
We proposed an extension of the popular class ac-
tivation maps (CAMs) for weakly-supervised local-
ization of multiple classes in images. The basis of
our approach is the use of the cosine loss instead of
cross-entropy with softmax for training the classifier
on images of individual objects. We found the sim-
ilarities between local feature cells and class embed-
dings to be better comparable across different classes
than class prediction scores generated by softmax net-
works, which allows for detecting the presence of
multiple classes using a fixed global threshold.
Experiments on the MS COCO dataset showed
that our dense class maps (DCMs) improve the object
detection performance compared to CAMs by a rela-
tive amount of 27% mAP with one-hot encodings and
by 28% with semantic class embeddings. At a recall
level of 30%, DCMs provide almost twice the preci-
sion of CAMs. With semantic embeddings, DCMs do
not achieve the same maximum recall as with one-hot
encodings, but maintain higher precision.
Even in the easier scenario of multi-label classi-
fication without localization, DCMs provide a 0.7%
better accuracy. Adding prior knowledge in the form
of semantic class embeddings improves the accuracy
much further by another 6%.
So far, we relied on the property that images in
the dataset used for classification pre-training dis-
play a single dominant object. Future work might
explore approaches for extending the cosine loss to
multi-label classification, so that the pre-training with
image-level class labels can be conducted on more
generic and complex images.
REFERENCES
Adebayo, J., Gilmer, J., Muelly, M., Goodfellow, I., Hardt,
M., and Kim, B. (2018). Sanity checks for saliency
maps. In Bengio, S., Wallach, H., Larochelle, H.,
Grauman, K., Cesa-Bianchi, N., and Garnett, R., edi-
tors, Advances in Neural Information Processing Sys-
tems (NeurIPS), volume 31. Curran Associates, Inc.
Barz, B. and Denzler, J. (2019). Hierarchy-based image
embeddings for semantic image retrieval. In IEEE
Winter Conference on Applications of Computer Vi-
sion (WACV), pages 638–647.
Barz, B. and Denzler, J. (2020). Deep learning on small
datasets without pre-training using cosine loss. In
IEEE Winter Conference on Applications of Computer
Vision (WACV), pages 1360–1369.
Choe, J., Oh, S. J., Lee, S., Chun, S., Akata, Z., and Shim,
H. (2020). Evaluating weakly supervised object local-
ization methods right. In IEEE Conference on Com-
Weakly-supervised Localization of Multiple Objects in Images using Cosine Loss
295

puter Vision and Pattern Recognition (CVPR), pages
3130–3139.
Desai, S. and Ramaswamy, H. G. (2020). Ablation-CAM:
Visual explanations for deep convolutional network
via gradient-free localization. In IEEE Winter Con-
ference on Applications of Computer Vision (WACV),
pages 972–980.
Durand, T., Mordan, T., Thome, N., and Cord, M. (2017).
WILDCAT: Weakly supervised learning of deep con-
vnets for image classification, pointwise localization
and segmentation. In IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 5957–
5966.
Fellbaum, C. (1998). WordNet. Wiley Online Library.
Frome, A., Corrado, G. S., Shlens, J., Bengio, S., Dean,
J., Ranzato, M., and Mikolov, T. (2013). DeViSE: A
deep visual-semantic embedding model. In Interna-
tional Conference on Neural Information Processing
Systems (NIPS), NIPS’13, pages 2121–2129, USA.
Curran Associates Inc.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep
residual learning for image recognition. In IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Kuznetsova, A., Rom, H., Alldrin, N., Uijlings, J., Krasin,
I., Pont-Tuset, J., Kamali, S., Popov, S., Malloci, M.,
Kolesnikov, A., Duerig, T., and Ferrari, V. (2020).
The open images dataset v4: Unified image classifi-
cation, object detection, and visual relationship detec-
tion at scale. International Journal of Computer Vi-
sion (IJCV).
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Doll
´
ar, P., and Zitnick, C. L. (2014). Mi-
crosoft COCO: Common objects in context. In Fleet,
D., Pajdla, T., Schiele, B., and Tuytelaars, T., editors,
European Conference on Computer Vision (ECCV),
pages 740–755, Cham. Springer International Pub-
lishing.
Loshchilov, I. and Hutter, F. (2017). SGDR: Stochastic
gradient descent with warm restarts. In International
Conference on Learning Representations (ICLR).
Qin, T., Zhang, X.-D., Tsai, M.-F., Wang, D.-S., Liu, T.-
Y., and Li, H. (2008). Query-level loss functions for
information retrieval. Information Processing & Man-
agement, 44(2):838–855.
Redmon, J. and Farhadi, A. (2017). YOLO9000: Better,
faster, stronger. In IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 6517–
6525.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., Berg, A. C., and Fei-Fei, L. (2015). Im-
agenet large scale visual recognition challenge. In-
ternational Journal of Computer Vision, 115(3):211–
252.
Salvador, A., Hynes, N., Aytar, Y., Marin, J., Ofli, F., We-
ber, I., and Torralba, A. (2017). Learning cross-modal
embeddings for cooking recipes and food images. In
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), pages 3068–3076. IEEE.
Selvaraju, R. R., Cogswell, M., Das, A., Vedantam, R.,
Parikh, D., and Batra, D. (2017). Grad-CAM: Visual
explanations from deep networks via gradient-based
localization. In IEEE International Conference on
Computer Vision (ICCV), pages 618–626.
Sudholt, S. and Fink, G. A. (2017). Evaluating word string
embeddings and loss functions for CNN-based word
spotting. In International Conference on Document
Analysis and Recognition (ICDAR), volume 1, pages
493–498. IEEE.
Sun, C., Shrivastava, A., Singh, S., and Gupta, A. (2017).
Revisiting unreasonable effectiveness of data in deep
learning era. In IEEE International Conference on
Computer Vision (ICCV).
Wu, B., Chen, W., Fan, Y., Zhang, Y., Hou, J., Liu, J., and
Zhang, T. (2019). Tencent ML-images: A large-scale
multi-label image database for visual representation
learning. IEEE Access, 7:172683–172693.
Zhang, X., Wei, Y., Feng, J., Yang, Y., and Huang,
T. S. (2018). Adversarial complementary learning for
weakly supervised object localization. In IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 1325–1334.
Zhong, Z., Zheng, L., Kang, G., Li, S., and Yang, Y. (2017).
Random erasing data augmentation. arXiv preprint
arXiv:1708.04896.
Zhou, B., Khosla, A., Lapedriza, A., Oliva, A., and Tor-
ralba, A. (2016). Learning deep features for discrimi-
native localization. In IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 2921–
2929.
Zhu, Y., Zhou, Y., Ye, Q., Qiu, Q., and Jiao, J. (2017). Soft
proposal networks for weakly supervised object local-
ization. In IEEE International Conference on Com-
puter Vision (ICCV), pages 1859–1868.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
296
