
Non-local Matching of Superpixel-based Deep Features for Color
Transfer
Hernan Carrillo
a
, Micha
¨
el Cl
´
ement
b
and Aur
´
elie Bugeau
c
Univ. Bordeaux, CNRS, Bordeaux INP, LaBRI, UMR 5800, F-33400, Talence, France
Keywords:
Superpixels, Attention Mechanism, Color Transfer, High-resolution Features, Non-local Matching.
Abstract:
In this article, we propose a new method for matching high-resolution feature maps from CNNs using at-
tention mechanisms. To avoid the quadratic scaling problem of all-to-all attention, this method relies on a
superpixel-based pooling dimensionality reduction strategy. From this pooling, we efficiently compute non-
local similarities between pairs of images. To illustrate the interest of these new methodological blocks, we
apply them to the problem of color transfer between a target image and a reference image. While previous
methods for this application can suffer from poor spatial and color coherence, our approach tackles these
problems by leveraging on a robust non-local matching between high-resolution low-level features. Finally,
we highlight the interest in this approach by showing promising results in comparison with state-of-the-art
methods.
1 INTRODUCTION
Non-local operators were introduced in image pro-
cessing in (Buades et al., 2005) with the so-called
Non-local means framework, initially used to filter
out image noise by computing a weighted mean of
all pixels in an image. Non-local means allow remote
pixels to contribute to the filtered response, achiev-
ing less loss of details. It was then extended to non-
local features matching for super-resolution (Glasner
et al., 2009), inpainting (Wexler et al., 2004), or color
transfer (Giraud et al., 2017) proving to achieve ro-
bust global features similarities.
Non-local ideas have recently been introduced
within neural networks architectures (Wang et al.,
2018) (Yu et al., 2018). The computation of non-
local similarities in neural networks is related to so-
called attention mechanisms (Bahdanau et al., 2015).
This attention block learns to compute similarities be-
tween input embeddings or data sequences. Lately,
attention mechanisms have been popularised with the
rise of transformers (Vaswani et al., 2017), i.e., end-
to-end neural network architectures that include only
(self-)attention layers. Transformers compute non-
local similarities between multi-level feature maps.
a
https://orcid.org/0000-0001-6820-004X
b
https://orcid.org/0000-0002-0899-3428
c
https://orcid.org/0000-0002-4858-4944
This type of architecture succeeds as a state-of-the-
art method due to the capacity and flexibility of these
attention blocks. The recent work (Wang et al., 2018)
has bridged the gap between the self-attention mech-
anism and non-local means. They stated that the self-
attention mechanism captures long-range dependen-
cies between deep learning features by considering all
features into the calculation.
Recently, the authors of (Zhang et al., 2019) pre-
sented similarity calculation between different feature
maps (target and reference images) based on atten-
tion mechanism for image colorization. The princi-
pal drawback of such mechanism is the complexity of
the non-local operation, which has to be done on fea-
tures with low dimensions due to computational bur-
den. This is known as the quadratic scaling problem.
However, low-resolution features usually do not carry
sufficient information for calculating precise pixel-
wise similarities. For instance, deep features mainly
carry high-level semantic information related to a spe-
cific application (i.e., classification) that can be less
relevant for high-resolution similarity calculation or
matching purposes.
In this paper, we compute similarities between
high-resolution deep features obtained from pre-
trained convolutional neural networks, as this retains
rich low-level characteristics. Due to the dimension-
ality issue, we exploit existing superpixels extractor
in order to match these high-resolution features. To
38
Carrillo, H., Clément, M. and Bugeau, A.
Non-local Matching of Superpixel-based Deep Features for Color Transfer.
DOI: 10.5220/0010767900003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theor y and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
38-47
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

illustrate the interest of this super-features matching
operation, we apply it to the problem of color trans-
fer. Color transfer aims at changing the color charac-
teristics of a target image by copying the ones from a
reference image. Ideally, the result must reach a visu-
ally pleasant image, avoiding possible artifacts or im-
proper colors. It covers various applications in areas
such as photo enhancement, films post-production,
and artistic design. Transferring the right colors re-
quires computing meaningful similarities between the
reference and the target images. These similarities
must preserve important textures and structures of
the target image. Therefore, we will show that high-
resolution features are essential.
The contributions are: 1) we propose the super-
features encoding block, which extracts deep fea-
ture maps using superpixel decomposition; 2) we
propose a robust non-local similarity between super-
features using an attention mechanism; and 3) we
build upon (Giraud et al., 2017) and include these
similarities in a non-local color fusion framework,
achieving promising results on several target and ref-
erence image pairs.
2 RELATED WORK
2.1 Superpixels
Exploiting superpixel representation allows finding
interesting region’s characteristics in images, such
as color and texture consistency (Achanta et al.,
2012). Many advantages can be derived using this
type of decomposition, for instance, dimensionality
reduction by grouping pixels with similar character-
istics (Van den Bergh et al., 2015). Additionally,
this compact representation helps to overcome high
computational costs on computer vision tasks such
as object segmentation (Tighe and Lazebnik, 2010)
or object localization (Fulkerson et al., 2009). How-
ever, the irregular form of the representation makes
its usage difficult in computer vision tasks, especially
the ones using deep learning approaches. Neverthe-
less, some works have proposed some representation
to cope with this issue. For instance, (Ihsan et al.,
2020) uses a superpixel label map as an input image
to a neural network to extract meaningful informa-
tion for clothing parsing application. (He et al., 2015)
presents the SuperCNN as a deep neural network ap-
proach for salient object detection. It uses superpixels
to describe two 1-D sequences of colors in order to re-
duce the computational burden. Nonetheless, neither
of the existing approaches effectively encodes deep
learning features for each superpixel.
2.2 Color Transfer
Transferring the right colors requires computing
meaningful similarities between the reference and the
target images. These similarities must preserve im-
portant textures and structures of the target image.
Most works on color transfer have focused on choos-
ing the characteristics on which to compute similar-
ities. These characteristics can be hand-crafted or
learned using deep learning methods. The first one
extracts image features by relying on manually prede-
fined descriptors (i.e., HOG (Dalal and Triggs, 2005),
SIFT (Lowe, 2004)); however there is no guaran-
tee that the descriptors are well suited for the task.
The second solves this issue by learning the features
from image dataset and leveraging on a training pro-
cedure, nonetheless feature dimensionality increases
enforcing the usage on low-resolution images. Fea-
tures similarities can be matched using global infor-
mation of the images (i.e., color histograms); or local
information such as matching small regions on the im-
ages (i.e., cluster segmentation, superpixel decompo-
sition). In the literature, color transfer techniques can
be classified into three classes: classic global-based
methods, classic local-based methods, and deep learn-
ing methods.
Global Methods: consider global color statistics
without any spatial information. It was initially in-
troduced in (Reinhard et al., 2001) which uses ba-
sics statistical tools (i.e., mean, standard deviation) to
match target and reference color information. (Piti
´
e
and Kokaram, 2007) (Xiao and Ma, 2006) extend
color matching on different color spaces to find an op-
timal color mapping between the images. (Frigo et al.,
2015) (Ferradans et al., 2013) propose a global illumi-
nant matching based on optimal transport color trans-
fer for enforcing artifacts-free results. More complex
methods such as (Murray et al., 2012) rely on Gaus-
sian Mixture Models to create compressed signatures
that ensure a compact representation of color charac-
teristics between images. Nevertheless, as mentioned
in (Piti
´
e, 2020), these methods fail to ensure spatial
consistency on resulting colors when content change
(i.e., transferring day and night images).
Local Methods: relies on spatial color mappings
(i.e., segmentation, clustering) to match local regions
of the target image and the reference image. (Liu
et al., 2016) uses superpixel level style-related and
style-independent feature correspondences. (Arbelot
et al., 2017) implement a texture-based framework for
matching local correspondence. Alternatively, (Tai
et al., 2005) uses a probabilistic segmentation in or-
der to impose spatial and color smoothness among lo-
cal regions. Still, the method does not provide control
Non-local Matching of Superpixel-based Deep Features for Color Transfer
39
over the matched superpixel. (Giraud et al., 2017)
overcomes this limitation by proposing a constrained
approximate nearest neighbor (ANN) patches and a
color fusion framework on superpixels. However, in
this type of local methods target and reference images
requires to share strong similarities.
Deep Learning Methods: brings to the matching
semantic-related characteristics from the target image
and reference image. Recently (Lee et al., 2020) pro-
pose a deep neural network architecture that leverages
on color histogram analogy for color transfer. The
latter uses target and reference histograms as input to
exploit global histogram information over a target in-
put image. (He et al., 2019) relies on semantically
meaningful dense correspondence between images.
Nonetheless, this type of methods relies on pure se-
mantic features (low-level features), which leads to
imprecise results if images from a different scene or
instances are used.
3 METHOD
In this section, we present our superpixel based
framework to match high-resolution features between
two RGB images I
T
and I
R
of size R
H×W×3
. In the
following, we will refer to I
T
as the target image and
I
R
as the reference image to be consistent with the
color fusion application.
3.1 Super-features Encoding
Let f
T
`
and f
R
`
be feature maps from a convolutional
neural network at layer ` of I
T
and I
R
respectively.
In the following, we will consider features coming
from pre-trained deep convolutional networks (see
Figure 3), but our method could be applied to other
types of hand-crafted features. More precisely, we fo-
cus on features extracted at the first three layers of a
deep network, as they provide a long range of low-
level features that suit diverse types of images. These
feature maps then have high dimensions, typically the
same size as the input image, times C channels with
H ×W ×C where C = 64, 128 or 256 for example.
A critical drawback of using high-resolution fea-
tures for matching operations is the high computa-
tional complexity. Let the number of features in a fea-
ture map be D = H ×W ×C, then the complexity of
the pixel-wise similarity computation is O
D
2
. To
solve this quadratic complexity problem, we imple-
ment an encoding layer based on superpixel represen-
tation. We first generate a superpixel map using a su-
perpixel decomposition algorithm on the initial color
images. Let us denote the target superpixel map by
Features Map
H x W x C
C X P
i
Average
pooling
C X 1
C
N
C X 1
C X P
j
Super-
features
'or'
'or'
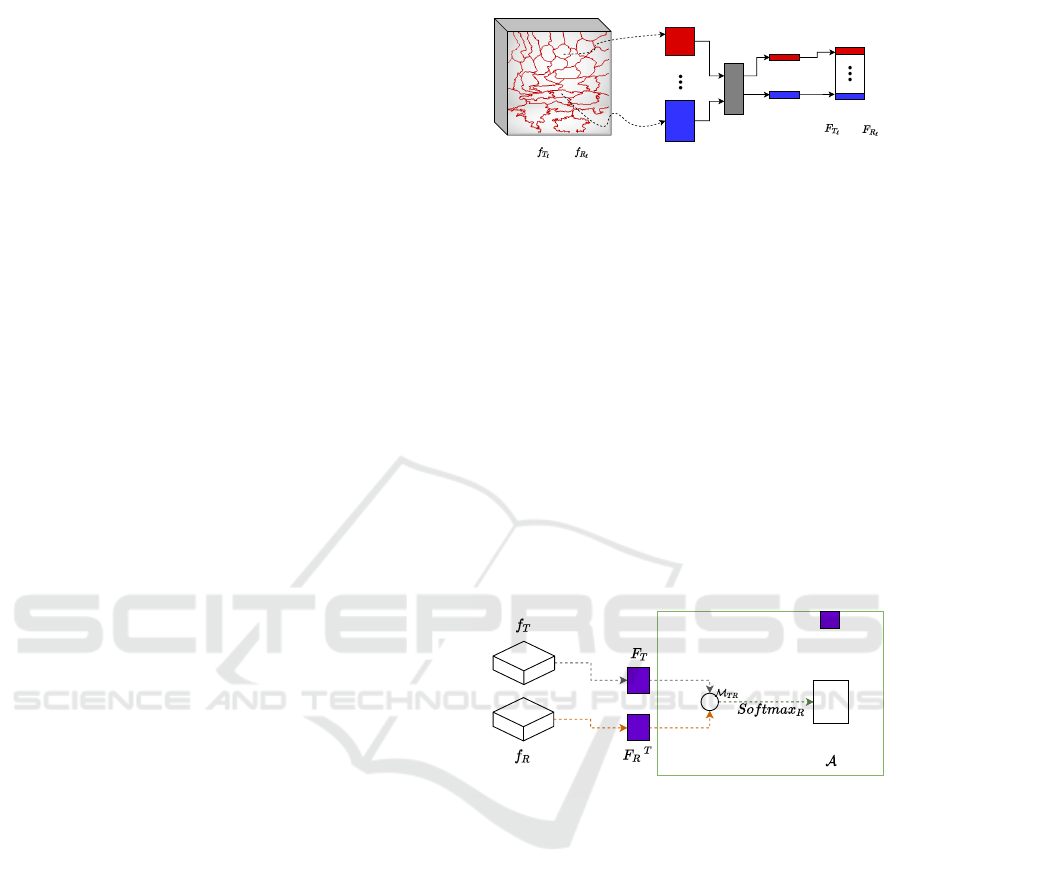
Figure 1: Diagram of our super-features encoding proposal
(SFE). This proposal takes as input a feature map of size
H ×W ×C, in which each superpixel is extracted and en-
coded in vectors of size C ×P
i
pixels. Afterward, the vectors
are pooled channel-wise and, finally, stacked in the super-
features matrix F with size C ×N number of superpixels.
S
T
, and the reference one by S
R
. Each of these maps
contains N
T
and N
R
superpixel respectively with P
i
pixels each, where i is the superpixel index. Next,
we extract features of size C ×P
i
for each superpixel.
These extracted features are then pooled spatially by
averaging channel-wise and stacked as a matrix of
size C ×N called super-features F. Figure 1 illustrates
this process. To sum up, the initial feature maps ( f
T
`
and f
R
`
) pass from size H ×W ×C to super-features
encoding (F
T
l
and F
R
l
) of size N
T
×C and, N
R
×C,
making feasible operations such as correlation calcu-
lation between large deep neural networks features.
H
T
x W
T
x C
X
H
R
x W
R
x C
N
T
x C
C
x
N
R
N
T
x N
R
SFE
Attention
map
Super-features matching
Figure 2: Diagram of our super-features matching (SFM).
This layer takes a reference feature map f
R
and a target fea-
ture map f
T
as an input, and outputs an attention map at
superpixel level by means of a non-local operation.
3.2 Super-features Matching
Our super-features provide a compact encoding to
compute the correlation between high-resolution deep
learning features. Here, we take inspiration from the
attention mechanism (Zhang et al., 2019) to achieve a
robust matching between target and reference super-
features. The process is illustrated in Figure 2.
Mainly, we exploit non-local similarities between the
target and the reference super-features by computing
the attention map at layer ` as:
A
`
= softmax
R
`
(M
T
`
R
`
/τ). (1)
The softmax
R
operation normalizes row-wise the
input into probability distributions, proportionally to
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
40

Convolution + ReLU + BN
VGG-19 pre-trained weights
SFE
Color Fusion
Reference image
Target image
Output image
Conv 1_1 Conv 1_2 Conv 2_1 Conv 2_2
Conv 3_1 Conv 3_2 Conv 3_3 Conv 3_4
H x W x 64 H x W x 128H x W x 3
H x W x 3 H x W x 64 H x W x 128
SFMSFM SFM
H x W x 256
H x W x 256
Figure 3: Diagram of our method using the first three levels of a modified VGG-19 architecture as our feature extractor. In our
method, we remove max-pooling layers from the baseline VGG-19 architecture to capture similarities between high-resolution
feature maps (H ×W ×C
`
). Also, the diagram presents our two new blocks, the super-features encoding block (SFE) and the
super-features matching block (SFM).
the number of target superpixels N
R
. Then, the final
attention map A is the weighted sum of the attention
maps at each layer `:
A =
∑
3
`=1
ω
`
A
`
∑
3
`=1
ω
`
. (2)
The matrix M
T R
is a correlation matrix between the
target and reference super-features and is computed
as:
M
T
`
R
`
(i, j) =
(F
T `
(i) −µ
T
`
) ·(F
R
`
( j) −µ
R
`
)
F
T
`
(i) −µ
T
`
2
F
R
`
( j) −µ
R
`
2
, (3)
where µ
T
and µ
R
are the mean of each super-feature.
We found that this normalization keeps correlation
values less sensitive to changes on τ for different
images. The attention map (1) is the same non-
local operator as the one proposed by (Zhang et al.,
2019). However, their computation requires low-
resolution features due to the inherent quadratic com-
plexity problem (as mentioned in Section 3.1).
We solve this complexity problem thanks to our
super-features encoding approach. Let n = H ×W be
the number of pixels in an image. Then, the number
of features in a deep learning feature map is D = n×C
which translate into a computational complexity of
O(D
2
) = O(n
2
C
2
). In contrast, with our novel super-
features encoding, if we set the number of superpix-
els in the order of
√
n, then instead we rewrite with
D
s
=
√
n ×C, resulting in O(D
2
s
) = O(n ×C
2
). As
C n can be ignored, we go from a quadratic to a
linear complexity operation O(n). As a result, we can
incorporate the correlation operation on large deep
learning features from both target and reference im-
ages. Conversely, (Zhang et al., 2019) can only rely
on deep-level features, usually the bottleneck features
(i.e., H/8 ×W /8 ×C) for similarities calculation.
4 APPLICATION TO COLOR
TRANSFER
We now present our color transfer method. It consists
of three blocks: 1) super-features encoding (SFE), 2)
super-features matching (SFM), and 3) color fusion
framework. The process is illustrated in Figure 3.
Our objective is to transfer colors from a refer-
ence I
R
to a target image I
T
. Concretely, this will be
done by passing colors from I
R
to I
T
based on pair-
wise feature-related similarities.
To match colors at superpixel level, we rely on
the attention map A and the average of each super-
pixel color. Specifically, we apply our attention map
as a soft-weight on the average colors, resulting in a
smooth correspondence.
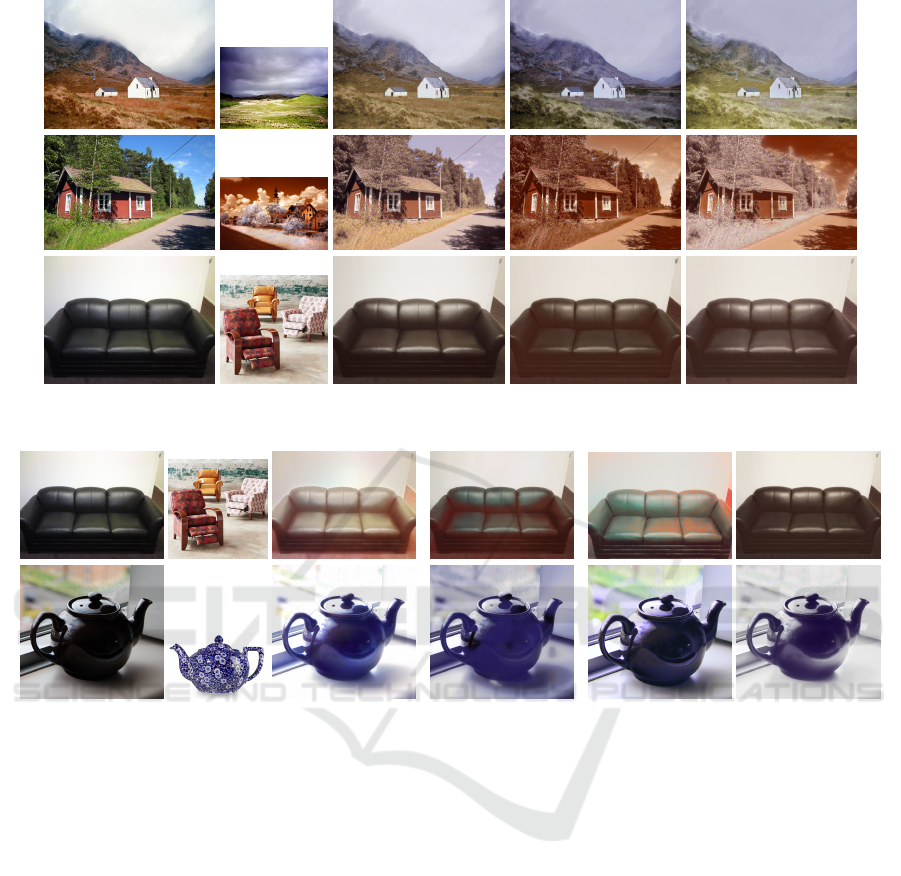
Figure 4 shows a direct super-features matching
between the target and reference images from Fig-
ure 3. This direct matching uses the weighted aver-
age color of its correspondence to replace the target’s
superpixels colors. Each row depicts the impact of
different high-resolution feature maps from the first
Non-local Matching of Superpixel-based Deep Features for Color Transfer
41

Layer 1Layer 2Layer 3
τ = 0.1 τ = 3 ×10
−2
τ = 1.5 ×10
−2
τ = 1 ×10
−4
Figure 4: Direct super-features matching using different τ values. Each of the rows depicts our results for direct matching
using super-features from the first, second, and third layers. The use of the first-level features helps to preserve fine details and
ensures color consistency. However, the second and third layers bring a more colorful and diverse matching between target
and reference super-features.
three levels of a pre-trained VGG-19. The first level
(first row) brings fine details and spatial and color
consistency onto the direct matching, while deeper
features (second and third row) seem more sensitive
to color features. This Figure 4 also illustrates (in
each column) the influence of temperature τ onto the
superpixel attention map. We can see that the proba-
bility distribution is over-smoothed (i.e., gray average
colors) for larger values of τ (i.e., τ = 0.1), meaning
that several reference super-features match one target
super-feature. Otherwise, a small τ value results in a
hard one-to-one matching between a target and refer-
ence super-features (i.e., τ = 1 ×10
−4
).
4.1 Color Fusion Framework
Direct superpixel matching by averaging colors is not
sufficient to obtain visually satisfying results. Image
details are indeed lost at superpixel level (i.e., door,
windows, etc., in Figure 4). Therefore we need
to transfer color at pixel level from our superpixel
matching.
For clarity in further equations, we denote the po-
sition and color centroids of a superpixel j in an image
I as:
¯
X( j) =
∑
p∈S( j)
p
P
j
and
¯
I( j) =
∑
p∈S( j)
I(p)
P
j
respectively, where P
j
is the number of pixels in su-
perpixel j.
Inspired by the formulation of (Giraud et al.,
2017), we compute the new value
ˆ
I
T
(p) of each pixel
p of the target as a weighted average of reference su-
perpixel representative colors:
ˆ
I
T
(p) =
∑
N
R
j=1
W (p, j)
¯
I
R
( j)
∑
N
R
j=1
W (p, j)
. (4)
The weight matrix W depends firstly on the distance
between pixel p and all target superpixel as in (Giraud
et al., 2017), and secondly, on our attention map:
W (p, j) =
N
T
∑
i=1
d(p, i)A(i, j). (5)
The intuition behind the attention map is the addition
of more relevant information about reference super-
features into the transfer process. The distance be-
tween pixel p and superpixel centroids is computed
over both positions and colors with a Mahalanobis-
like formulation:
d(p, i) = e
−
(V
T
(p)−
¯
V
T
(i))
T
Σ
−1
i
(V
T
(p)−
¯
V
T
(i))
σ
g
!
, (6)
with position and color vectors being V (p) = [p, I(p)]
and
¯
V
T
( j) = [
¯
X
T
( j),
¯
I
T
( j)], and the spatial and colori-
metric covariances of pixels in superpixel i:
Σ
i
=
δ
2
s
Cov(p) 0
0 δ
2
c
Cov(I(p))
. (7)
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
42

(a) (b)
(c) (d)
Figure 5: Color fusion framework results. (a) (Giraud et al.,
2017) color fusion result. (b) Our color fusion result. (c)
(Giraud et al., 2017) result + regrain. (d) Our result + re-
grain. The regrain algorithm is from (Piti
´
e et al., 2005).
Parameters δ
s
and δ
c
weight the influence of color and
spatial information, respectively.
Finally, as in (Giraud et al., 2017), after color fu-
sion we apply a post-processing step using a color re-
grain algorithm (Piti
´
e et al., 2005), which eventually
matches the color distribution of I
R
and the gradient of
I
T
. Figure 5 presents an example of our color transfer
framework compared to the result of (Giraud et al.,
2017). Visually, our results present better spatial con-
sistency of colors. For instance, the sky on our re-
sults has more natural smooth color transitions com-
pared to non-natural ones with (Giraud et al., 2017)
(i.e., yellow to blue).
5 RESULTS
In this section, we first present the implementation
details used to validate our method and then provide
a detailed qualitative comparison between our results
and three state-of-the-art color transfer approaches.
5.1 Implementation Details
Superpixel segmentation is done using the SLIC al-
gorithm (Achanta et al., 2012), in which the number
of superpixel depends on the actual size of the image.
Experimentally, we set the number of superpixel as
3 ×
√
n where n is the number of pixels in the current
image.
To build feature maps, we rely on a modified pre-
trained VGG-19 (Simonyan and Zisserman, 2015) as
our texture and color characteristics extractor, due to
its simplicity and its 95.24% classification accuracy
Layer 1Layer 2Layer 3
w/o downsampling with downsampling
Figure 6: Effect on direct super-features matching (i.e., be-
fore color fusion) using high-resolution feature maps (w/o
downsampling) and using low-resolution feature maps
(with downsampling). Target and reference images are pre-
sented in Figure 7.
on the ImageNet Top-5 classes. The main modifica-
tion was the removal of max-pooling layers from the
first three levels (see Figure 3) as it highly improves
matching results compared to using upsampling on
max-pooled feature maps at Conv2 2 and Conv3 4
from the baseline VGG-19. Figure 6 exemplifies that
matching low-resolution features does not preserve
details nor retains color coherence, especially when
going deeper into the architecture. Also, note that our
approach can work with other types of CNN architec-
tures regardless of their features dimensions.
In order to choose an optimal temperature τ value,
we experimented on different images at distinct tem-
peratures. Empirically, we obtain satisfying results
using τ = 0.015 and ω = 1. In addition, all experi-
ments have been run with δ
s
= 10 and δ
c
= 0.1, as
recommended by (Giraud et al., 2017) to favor spatial
consistency.
5.2 Analysis on Different Layers
Our SFE and SFM blocks support any CNN features
map dimensions, so choosing to work with one or
coupling many of these features maps depends mostly
on the application. In this experiment, we analyze the
effects of using separately each of the first three fea-
ture map outputs for the color transfer application.
From the different columns of Figure 7 we can re-
tain that each layer focuses on different aspects of the
image, resulting in color variations of the same target
image. Specifically, in the first row (house image),
Non-local Matching of Superpixel-based Deep Features for Color Transfer
43
Target Reference Layer 1 Layer 2 Layer 3
Figure 7: Results of our method using each of the three layers separately with τ = 0.015.
Target Reference (Piti
´
e et al., 2007) (Giraud et al., 2017) (Lee et al., 2020) Ours
Figure 8: Comparison of color transfer results on indoor images. We compare our method with three different state-of-the-art
approaches: (Piti
´
e et al., 2007) color distribution grading, (Giraud et al., 2017) color fusion based on superpixel representation
and, (Lee et al., 2020) deep learning-based color histogram analogy.
we can see that the deeper layer (layer 3) focuses on
the grass color while the second layer focuses on the
mountain color. In the second and third rows, layers 2
and 3 bring stronger colors from the reference image,
but the results are still unrealistic. In the first layer, the
recovered image seems more natural; however, most
of the colors transferred from the reference image are
opaque or not transferred.
Finally, we decided to combine all three layers as
each of them brings important feature information to
achieve pleasant and realistic images for this color
transfer application.
5.3 Comparison
We compare our method against three ap-
proaches: (Piti
´
e et al., 2007) which proposes an
automated color transfer based on color distribu-
tions; (Lee et al., 2020) which implements a color
transfer approach based on color histogram analogy
using a deep neural network; and (Giraud et al.,
2017) which implements the color fusion framework
by leveraging on its proper superpixel decompo-
sition. All three mentioned approaches have been
considered state-of-the-art in color transfer, and
have open-source codes for a fair comparison. Each
method has been run with its default parameters.
Results comparing the three methods are shown
in Figures 8, 9 and 10. Overall, our results (last col-
umn) have more visually pleasant colors and consis-
tency in image texture, providing more realistic color
transfers with respect to the other methods. Figure 8
shows that our approach correctly matches and trans-
fers natural colors from indoor images, avoiding color
bleeding (blue color on the wall) as shown in (Gi-
raud et al., 2017), (Lee et al., 2020) and partially
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
44
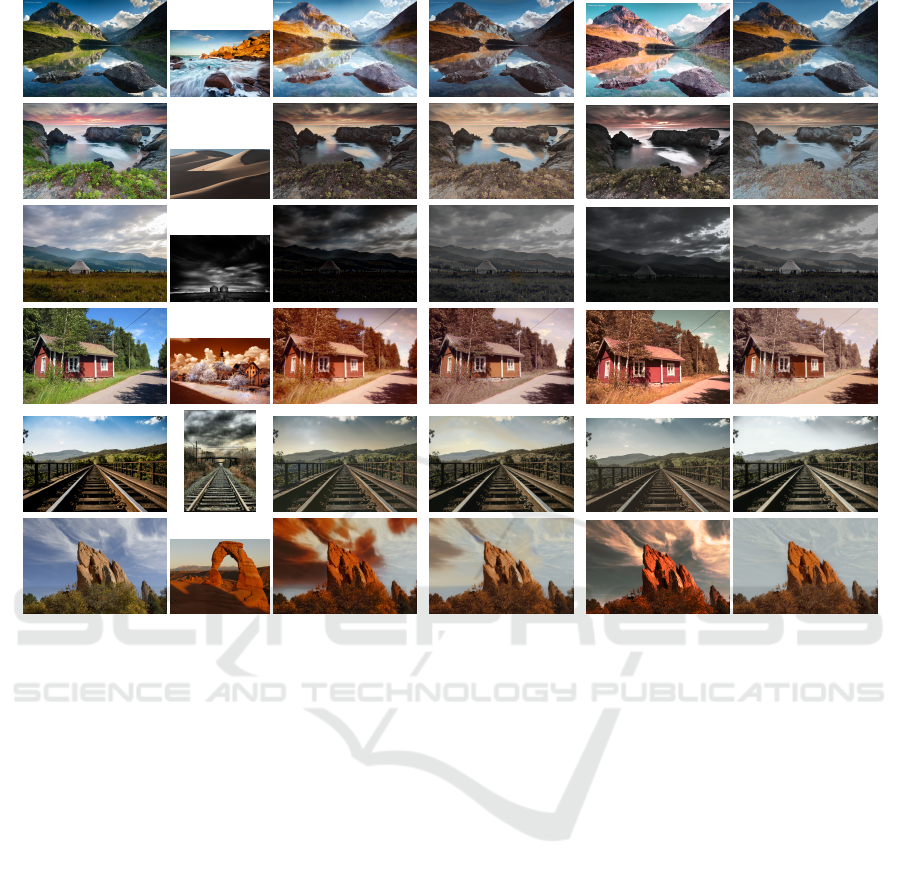
Target Reference (Piti
´
e et al., 2007) (Giraud et al., 2017) (Lee et al., 2020) Ours
Figure 9: Comparison of color transfer results on outdoor images.
in (Piti
´
e and Kokaram, 2007) results. For outdoor im-
ages shown in Figure 9, we observe that (Piti
´
e et al.,
2007) and (Lee et al., 2020) can suffer from over-
saturation of the illumination on some of their results
(first, fourth, sixth images). Although this problem
does not appear in (Giraud et al., 2017) some of its
results present visible unnatural effects on sky col-
ors such as a halo effect (first image) and yellow-
ish marks (fifth, sixth images). Our results for out-
door images overcome these issues thanks to the ro-
bust matching on high-resolution superpixel deep fea-
tures, which ensures color consistency and spatially
coherent colors across the resulting images. Figure 10
presents images with no background (studio shoot-
ing like images). In this case, results by (Piti
´
e et al.,
2007) and (Lee et al., 2020) show unnatural color ef-
fects around the bottle and background. On the other
hand, (Giraud et al., 2017) approach and ours achieve
pleasant color results without over-saturation nor arti-
facts on the resulting image. Lastly, our method cor-
rectly transfers colors to the statue image resulting in
the most visually satisfying and realistic results with
regards to all compared methods.
6 CONCLUSION
This paper proposed the novel super-features en-
coding block (SFE) and the super-features matching
(SFM) block that successfully encodes and matches
high-resolution deep learning features from different
images using superpixel decomposition. We validate
these two blocks on the problem of color transfer; for
doing that, we update the color fusion framework ini-
tially proposed by (Giraud et al., 2017) to consider
our attention map, which provides texture and color
knowledge from the reference image onto the final
color transfer step. Finally, our method achieves more
visually consistent and realistic results in compari-
son to the three state-of-the-art methods considered.
Work is underway on applying our new super-features
encoding and matching blocks to other image editing
applications. Another future line of research aim at
including this block in an end-to-end deep learning
architecture.
Non-local Matching of Superpixel-based Deep Features for Color Transfer
45
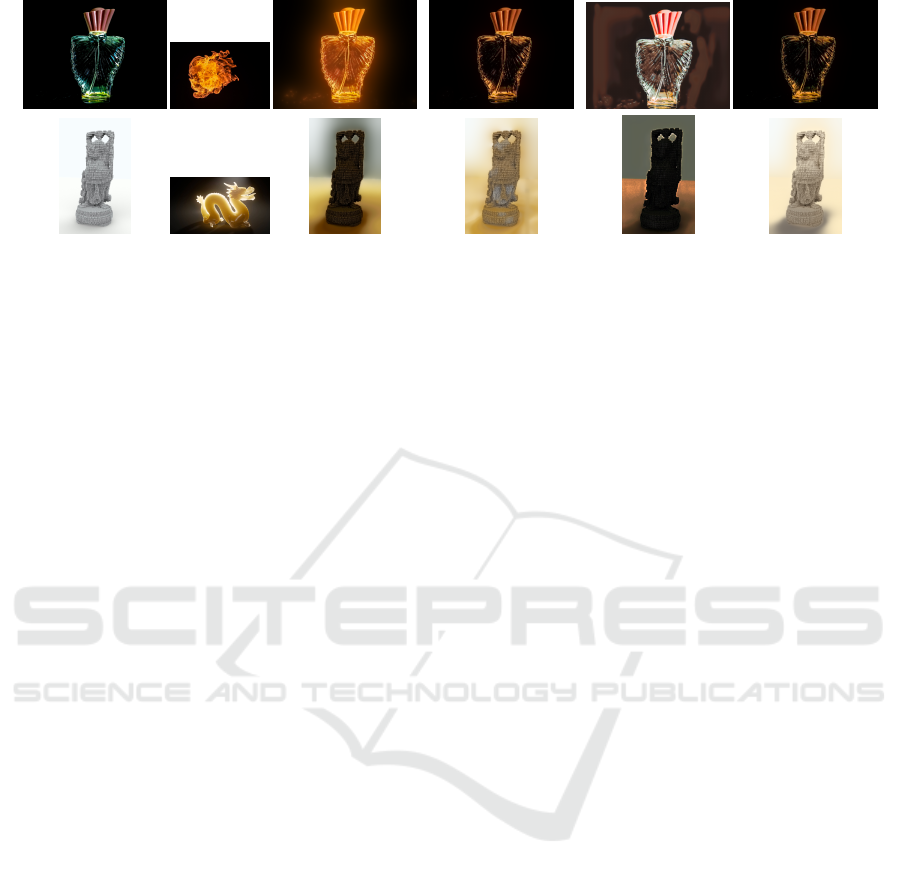
Target Reference (Piti
´
e et al., 2007) (Giraud et al., 2017) (Lee et al., 2020) Ours
Figure 10: Comparison of color transfer results on images with no background.
ACKNOWLEDGEMENTS
This study has been carried out with financial support
from the French Research Agency through the Post-
ProdLEAP project (ANR-19-CE23-0027-01).
REFERENCES
Achanta, R., Shaji, A., Smith, K., Lucchi, A., Fua, P., and
S
¨
usstrunk, S. (2012). SLIC superpixels compared to
state-of-the-art superpixel methods. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
34(11):2274–2282.
Arbelot, B., Vergne, R., Hurtut, T., and Thollot, J. (2017).
Local texture-based color transfer and colorization.
Computers & Graphics, 62:15–27.
Bahdanau, D., Cho, K., and Bengio, Y. (2015). Neural ma-
chine translation by jointly learning to align and trans-
late. In International Conference on Learning Repre-
sentations.
Buades, A., Coll, B., and Morel, J.-M. (2005). A non-
local algorithm for image denoising. In Conference
on Computer Vision and Pattern Recognition.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In Conference on Com-
puter Vision and Pattern Recognition.
Ferradans, S., Papadakis, N., Rabin, J., Peyr
´
e, G., and Au-
jol, J.-F. (2013). Regularized discrete optimal trans-
port. In Scale Space and Variational Methods in Com-
puter Vision.
Frigo, O., Sabater, N., Demoulin, V., and Hellier, P.
(2015). Optimal transportation for example-guided
color transfer. In Asian Conference on Computer Vi-
sion.
Fulkerson, B., Vedaldi, A., and Soatto, S. (2009). Class
segmentation and object localization with superpixel
neighborhoods. In International Conference on Com-
puter Vision.
Giraud, R., Ta, V.-T., and Papadakis, N. (2017). Superpixel-
based color transfer. In International Conference on
Image Processing.
Glasner, D., Bagon, S., and Irani, M. (2009). Super-
resolution from a single image. In International Con-
ference on Computer Vision.
He, M., Liao, J., Chen, D., Yuan, L., and Sander, P. V.
(2019). Progressive color transfer with dense seman-
tic correspondences. ACM Transactions on Graphics,
38(2).
He, S., Lau, R., Liu, W., Huang, Z., and Yang, Q. (2015).
SuperCNN: A superpixelwise convolutional neural
network for salient object detection. International
Journal of Computer Vision, 115:330–344.
Ihsan, A., Chu Kiong, L., Naji, S., and Seera, M. (2020).
Superpixels features extractor network (SP-FEN) for
clothing parsing enhancement. Neural Processing
Letters, 51:2245–2263.
Lee, J., Son, H., Lee, G., Lee, J., Cho, S., and Lee, S.
(2020). Deep color transfer using histogram analogy.
The Visual Computer, 36(10):2129–2143.
Liu, J., Yang, W., Sun, X., and Zeng, W. (2016). Photo
stylistic brush: Robust style transfer via superpixel-
based bipartite graph. In International Conference on
Multimedia and Exposition.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Murray, N., Skaff, S., Marchesotti, L., and Perronnin, F.
(2012). Toward automatic and flexible concept trans-
fer. Computers & Graphics, 36(6):622–634.
Piti
´
e, F. (2020). Advances in colour transfer. IET Computer
Vision, 14:304–322.
Piti
´
e, F. and Kokaram, A. (2007). The linear monge-
kantorovitch linear colour mapping for example-based
colour transfer. In European Conference on Visual
Media Production.
Piti
´
e, F., Kokaram, A., and Dahyot, R. (2005). Towards
automated colour grading. In IEEE European Confer-
ence on Visual Media Production.
Piti
´
e, F., Kokaram, A. C., and Dahyot, R. (2007). Auto-
mated colour grading using colour distribution trans-
fer. Computer Vision and Image Understanding,
107(1–2):123–137.
Reinhard, E., Ashikhmin, M., Gooch, B., and Shirley, P.
(2001). Color transfer between images. ACM Trans-
actions on Graphics, 21(5):34–41.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
46

Simonyan, K. and Zisserman, A. (2015). Very deep con-
volutional networks for large-scale image recogni-
tion. International Conference on Learning Represen-
tations.
Tai, Y.-W., Jia, J., and Tang, C.-K. (2005). Local color
transfer via probabilistic segmentation by expectation-
maximization. In Conference on Computer Vision and
Pattern Recognition.
Tighe, J. and Lazebnik, S. (2010). Superparsing: Scalable
nonparametric image parsing with superpixels. In Eu-
ropean Conference on Computer Vision.
Van den Bergh, M., Boix, X., Roig, G., and Van Gool, L.
(2015). SEEDS: Superpixels extracted via energy-
driven sampling. International Journal of Computer
Vision, 111(3):298–314.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. In Advances in
Neural Information Processing Systems.
Wang, X., Girshick, R., Gupta, A., and He, K. (2018). Non-
local neural networks. In Conference on Computer
Vision and Pattern Recognition.
Wexler, Y., Shechtman, E., and Irani, M. (2004). Space-
time video completion. In Conference on Computer
Vision and Pattern Recognition.
Xiao, X. and Ma, L. (2006). Color transfer in correlated
color space. In International Conference on Virtual
Reality Continuum and its Applications.
Yu, J., Lin, Z., Yang, J., Shen, X., Lu, X., and Huang, T. S.
(2018). Generative image inpainting with contextual
attention. In Conference on Computer Vision and Pat-
tern Recognition.
Zhang, B., He, M., Liao, J., Sander, P. V., Yuan, L., Bermak,
A., and Chen, D. (2019). Deep exemplar-based video
colorization. In Conference on Computer Vision and
Pattern Recognition.
APPENDIX
Figure 11 shows additional resulting images from the
three state-of-the-art methods and our method.
Target Reference (Piti
´
e et al., 2007) (Giraud et al., 2017) (Lee et al., 2020) Ours
Figure 11: More color transfer results.
Non-local Matching of Superpixel-based Deep Features for Color Transfer
47
