
Seg2Pose: Pose Estimations from Instance Segmentation Masks in One
or Multiple Views for Traffic Applications
Martin Ahrnbom
a
, Ivar Persson
b
and Mikael Nilsson
c
Centre for Mathematical Sciences, Lund University, Sweden
Keywords:
Pose Estimation, Instance Segmentation, Convolutional Neural Network, Traffic Safety, Road Users, Track-
ing, Stereo Camera, Trinocular Camera Array, Traffic Surveillance.
Abstract:
A system we denote Seg2Pose is presented which converts pixel coordinate tracks, represented by instance
segmentation masks across multiple video frames, into world coordinate pose tracks, for road users seen by
static surveillance cameras. The road users are bound to a ground surface represented by a number of 3D
points and does not necessarily have to be perfectly flat. The system works with one or more views, by
using a late fusion scheme. An approximate position, denoted the normal position, is computed from the
camera calibration, per-class default heights and the ground surface model. The position is then refined a
novel Convolutional Neural Network we denote Seg2PoseNet, taking instance segmentations and cropping
positioning as its input. We evaluate this system quantitatively both on synthetic data from CARLA Simulator
and on a real recording from a trinocular camera. The system outperforms the baseline method of only using
the normal positions, which is roughly equivalent of a typical 2D to 3D conversion system, in both datasets.
1 INTRODUCTION
Object detection and tracking in world coordinates is
a core computer vision task that has received a signif-
icant amount of attention in recent years, in particular
for robotics and autonomous driving scenarios (Brazil
et al., 2020; Kumar et al., 2021; Muller et al., 2021;
Yin et al., 2021). A somewhat less explored topic
is for surveillance scenarios where the camera is sta-
tionary and a full extrinsic and intrinsic camera cal-
ibration is available. A part of the reason for this is
that decent approximate solutions for converting pixel
coordinate positions to world coordinate positions of
objects exist and are quite trivial, but obtaining high
precision world coordinate positions of road users in
a surveillance video remains a challenging task.
A common approach for obtaining world coordi-
nate locations of objects is to first locate them in pixel
coordinates, and using camera calibration to convert
the 2D position into 3D. The commonly used Axis-
Aligned Bounding Box (AABB) does not capture the
details of the position of objects very well. Therefore,
we utilize an object detector which provides instance
segmentations, containing more spatial information
a
https://orcid.org/0000-0001-9010-7175
b
https://orcid.org/0000-0003-4958-3043
c
https://orcid.org/0000-0003-1712-8345
Figure 1: Result of our method, with the T-style Trinocular
Seg2PoseNet configuration, on a CARLA Simulator image.
than AABBs, that can be useful when converting to
world coordinates. Detectron2’s implementation of
Mask R-CNN (Wu et al., 2019; He et al., 2017) was
chosen for this task. It also produces high quality de-
tections for many scenes even when not fine-tuned to
the particular dataset used, including the videos used
in Section 4.
Furthermore, reasonably good tracking methods
exist that use instance segmentations directly (Ahrn-
bom et al., 2021b; Yang et al., 2020). Thus, in order
to obtain world coordinate tracks, the remaining task
is to convert segmentation masks into world coordi-
nates. Such a system has important applications for
Ahrnbom, M., Persson, I. and Nilsson, M.
Seg2Pose: Pose Estimations from Instance Segmentation Masks in One or Multiple Views for Traffic Applications.
DOI: 10.5220/0010777700003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
777-784
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
777
Camera
calibration
as projection
matrix
3D ground points
Cropped instance
segmentation mask
Cropping
coordinates
Normal position
Seg2PoseNet Normalized pose
Crop
Mask R-CNN +
bicyclist logic
RGB image
Final poseInstance segmentation
masks
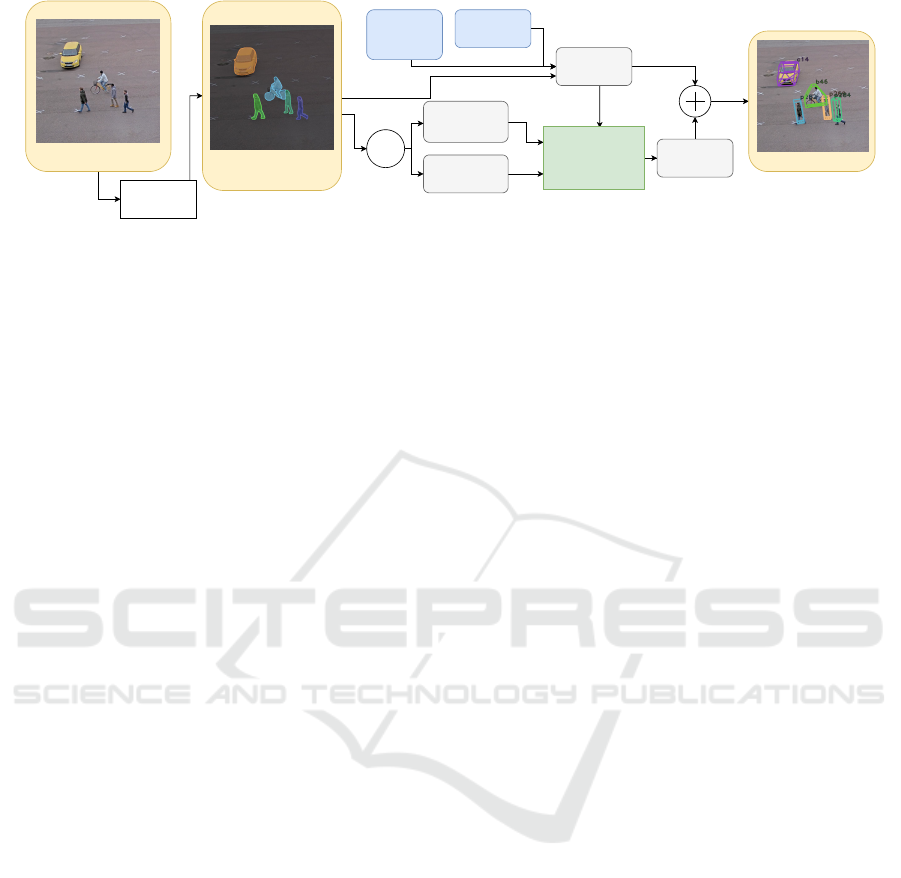
Figure 2: An overview of Seg2PoseNet and how it fits into our suggested pipeline. An instance segmentation mask is cropped
and sent into Seg2PoseNet, alongside the normal position computed from the mask (See Section 3.2). The normalized output
from Seg2PoseNet is added to the normal position to obtain the final pose in world coordinates. Best viewed in color.
traffic safety research. Obtaining high-precision po-
sitions of road users in videos allows for applications
like safety estimation and traffic monitoring.
For this purpose, we propose a framework,
Seg2Pose, including a Convolutional Neural Network
(CNN), Seg2PoseNet, which takes as input an in-
stance segmentation mask and produces the world co-
ordinate position of the road user. By looking at mul-
tiple positions in a track, we estimate the orientation
of the road user by assuming that they are facing the
same direction as they are moving. Cases like when a
car goes in reverse or drifts sideways are thus not cov-
ered in this work, although extending our approach to
handle such cases should be possible.
A second goal of our work is to evaluate if us-
ing segmentation masks from more than a single cam-
era view improves the positioning of road users. We
therefore test our system with monocular, stereo and
several types of trinocular (three-view) cameras, and
evaluate how much the positioning improves when
seeing the road user from different angles. We only
consider camera designs where the lenses are close,
allowing a single device to contain all the cameras.
We train and evaluate our Seg2PoseNet system on
purely synthetic data from CARLA Simulator (Doso-
vitskiy et al., 2017), and then perform tests on record-
ings from a scene captured by a three-lens camera
prototype device in reality, training on and compar-
ing the results with manually created ground truth
poses created with T-Analyst software (Lund Univer-
sity, Transport and Roads, 2018). An overview of our
system is shown in Figure 2.
Our main contributions are as follows:
• We demonstrate how segmentation masks can be
used to accurately find world coordinate positions
in calibrated cameras.
• We evaluate different camera configurations
against the baseline of using only normal posi-
tions, on both synthetic and real data.
2 RELATED WORK
2.1 Pose Estimation
6D pose estimation in general refers to the problem
of estimating both the x, y and z coordinates as well
as three rotational parameters in world coordinates,
given some representation in pixel coordinates in one
or more images. It is often assumed that accurate 3D
models of the objects are known and used as input to
such a system, and sometimes these models even have
textures. Examples of work in this field are (Hodan
et al., 2020; Zakharov et al., 2019). This task is in
many ways similar to the road user pose estimation
problem explored in this paper, but they differ in a
number of critical ways:
• Our method does not require high quality 3D
models of the road users.
• Road users only move along a ground surface,
represented by a set of ground points, described
in Section 3.1. Thus z is a function of x, y, so only
two positional parameters need to be estimated.
• It is assumed that the rotation of a road user is
determined by the changes in position over time.
• Seg2PoseNet does not require RGB images, as
that is handled by Mask R-CNN.
2.2 Traffic Surveillance
One example of world coordinate traffic surveillance
with modern computer vision tools is the STRUDL
system (Jensen et al., 2019). It uses an approximate
method for converting 2D into 3D, by picking a point
in the AABB and assuming it to be on a fixed height
above the ground, and computing a single 3D point
from there. This method is essentially equivalent to
the normal positions described in Section 3.2. Their
focus were on making the whole system easily usable
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
778

though, and not on the particular task for 2D to 3D
conversion.
An example of a more detailed 3D pose estima-
tion in a traffic environment is UTS (Bradler et al.,
2021) which estimates simplified 3D models similar
to the ones in this paper, but estimates them from
AABBs and employs active edge detection to estimate
the pose. Their approach is limited to motorized road
users and only considers a monocular view. An un-
scented Kalman filter is used to produce physically
reasonable tracks.
Another example is (Zhang et al., 2020) which has
the benefit of being trained to be robust to intrinsic
camera parameters, but requires both a 3D point cloud
and known 3D models to estimate poses, is only tested
on cars and only with a monocular camera.
Yet another example is (Zhang and Zhang, 2020),
where 3D bounding boxes are estimated for only cars,
buses and trucks, and they require seeing wheels to
correctly place the pose, limiting the flexibility of
their method. The scene used in Section 4.2 contains
cars seen almost entirely from above, with no wheels
visible. They also assume a perfectly flat ground sur-
face, and only evaluated with monocular cameras, fur-
ther limiting their flexibility.
In summary, while pose estimation of road users
in traffic environments have been explored, to the best
of our knowledge we are the first to publish a method
which is flexible both in terms of which road user
classes it works with, how many cameras are used,
does not require detailed 3D models of the road users
and uses segmentations as a detailed 2D description
of the position, rather than the less detailed AABBs
of other methods.
3 OUR SYSTEM: Seg2Pose
3.1 Ground Surface Representation
The ground surface is represented by n many 3D
points (x
i
, y
i
, z
i
). The ground height above any given
top-down position (x, y) is given by
z(x, y) =
∑
n
i
z
i
e
−α
√
(x
i
−x)
2
+(y
i
−y)
2
∑
n
i
e
−α
√
(x
i
−x)
2
+(y
i
−y)
2
(1)
where α is a smoothing parameter, set to 0.3. This
representation allows an accurate model for the
ground for all typical traffic environments except
those with multiple stacked ground levels, for exam-
ple a bridge over a road. Such situations could be
handled by treating the bridge and the road below as
two separate ground surfaces. There exists devices
designed for capturing highly accurate 3D points in
real traffic environments, such as the Leica S06 (Le-
ica Geosystems AG, 2009) used in our experiments.
3.2 Normal Positions
The normal position of a road user seen in one camera
view is defined as the world coordinate point found by
the following algorithm. Take the center point of the
segmentation mask, in pixel coordinates, and com-
pute the intersection of a camera ray going through
that point and hitting the ground surface, here ap-
proximated by a plane, raised to the default height of
that road user class. This position is fine-tuned by
an optimization over the actual ground surface, again
raised to the default height, until a world coordinate
point is found that projects into the center point of the
segmentation. The default heights for each road user
class are computed by going through the training set,
and testing different default heights with the bisection
method until approximately half of their normal posi-
tions are closer than the true positions, and the other
approximate half are further away.
3.3 Seg2PoseNet
The job of Seg2PoseNet is to fine-tune the normal po-
sitions by computing a position residual added to the
normal positions of detected road users. The network
takes two inputs:
• A cropped segmentation mask to the size 420 ×
420, zero-padded if close to the border.
• A vector of four elements containing the pixel co-
ordinate center position of as cropped segmenta-
tion mask, as well as the normal position.
This way, the network has access to both the appear-
ance of the road user, as well as the region of the im-
age it comes from. It should thus have all the infor-
mation it needs to learn an accurate mapping between
pixel and world coordinates for road users in a given
scene. The network design is shown in Figure 3.
When estimating a road user’s position from
multiple views, a late fusion strategy is applied.
Seg2PoseNet is applied to each view’s mask indepen-
dently, and the output is added to the normal position
for each view to obtain several, independent estimates
of the true position. The final estimate is simply the
average of the estimates from the different views.
3.4 Estimating Rotations
When computing the poses for road user tracks, the
world coordinate position of a given road user ID is
Seg2Pose: Pose Estimations from Instance Segmentation Masks in One or Multiple Views for Traffic Applications
779

Final world coordinate position
2x2
Maxpooling
5x5
conv
block
5x5
conv
block
3x3
conv
block
x 5
2x2
Maxpooling
6x6
conv
Flatten
Concat
4D data vector
x
p
y
p
x
n
y
n
AxB Conv block
AxB
conv
ReLU
AxB
conv
ReLU
x 3
Dense ReLU
x 3
Dense 2.5 tanh(x)
11x420x420
21x420x420
21x210x210
31x210x210
71x1x1
75x1
148x1
2x1
Cropped
segmentation
mask
1x420x420
71x1
71x6x6
Normalized pose
Normal position
(x
n
, y
n
)
3x3
conv
block
Figure 3: The design of Seg2PoseNet. The sizes of the feature maps and feature vectors are shown in gray. The purple box at
the bottom explains what is meant by a “conv block”.
stored. If a previous position exists for that road user
ID, the difference is computed. If that difference is
larger than 2 cm, the direction is updated to be
D
t+1
= 0.1D + 0.9D
t
(2)
where D is the normalized difference, D
t+1
is the di-
rection for the new frame and D
t
is the direction of the
previous frame. These are two-dimensional vectors in
world coordinates.
3.5 Rough 3D Models
During training, every fourth training example was
a rough, simple 3D model, as shown in Figure 4,
placed in a random position and orientation in the
scene. These models were rasterized into segmenta-
tion masks. This helps the network learn something
about how to position road users in parts of the image
that do not appear in the training set.
Figure 4: Rough 3D models for car, pedestrian and bicy-
clist, from left to right. These simple 3D models, are used
in alongside the datasets’ training examples.
4 EXPERIMENTS
We performed two separate experiments for differ-
ent goals. One experiment was done on purely syn-
thetic data from the CARLA Simulator, where an ex-
act ground truth position is known for every visible
road user. The purpose of this experiment is to get an
accurate numerical evaluation of our system, and how
the different camera designs affect the performance
of our positioning system. The other experiment was
made using a real recording to verify that the system
works in reality.
4.1 CARLA Simulator
A road junction in the default map for CARLA Simu-
lator version 0.9.11 (Dosovitskiy et al., 2017) was se-
lected, and 83 road users (43 pedestrians, 12 bicyclists
and 28 cars) were placed into the environment and
their movements were simulated. This scene was cap-
tured by five cameras, positioned to allow the recre-
ation of different camera configurations according to
Figure 5. These cameras were recording images ev-
ery 0.075 seconds in sync, for 22.000 frames. The
relatively low frame rate increases the variety in each
frame without increasing the time to perform the ex-
periment. This video was then divided into a training,
validation and testing with 7000 frames in each set.
Between the sets, 150 frames were discarded to re-
duce similarity between the sets.
In addition, 184 points were sampled from the
ground surface around the area visible in the cam-
era views. Particularly many were sampled near the
edges of the sidewalks, where the height of the ground
surface varies the most.
Mask R-CNN was applied to all the images, and
the instance segmentations were matched to the road
user IDs by projecting the true 3D positions into each
camera and associating it with any segmentation mask
that covered that point, if they were of the same road
user class. Then, Seg2PoseNet was trained on these
examples. For each camera and road user class pair,
the network was trained with a “best of four” strat-
egy: the network was trained four times and the epoch
with the best validation loss across all these was cho-
sen for use on the test set. Training multiple times
decreases the importance of the random sampling for
training examples. The same four initializations were
used for all cameras. The learning rate was 5 ×10
−5
,
the batch size was 16, each epoch was 64 batches and
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
780
Monocular
camera Stereo camera
Trinocular
'I' style
camera
Trinocular
'L' style
camera
Trinocular
'T' style
camera
10 cm
30
cm
10 cm
20 cm 20 cm
10 cm
40 cm
10/30/40
cm
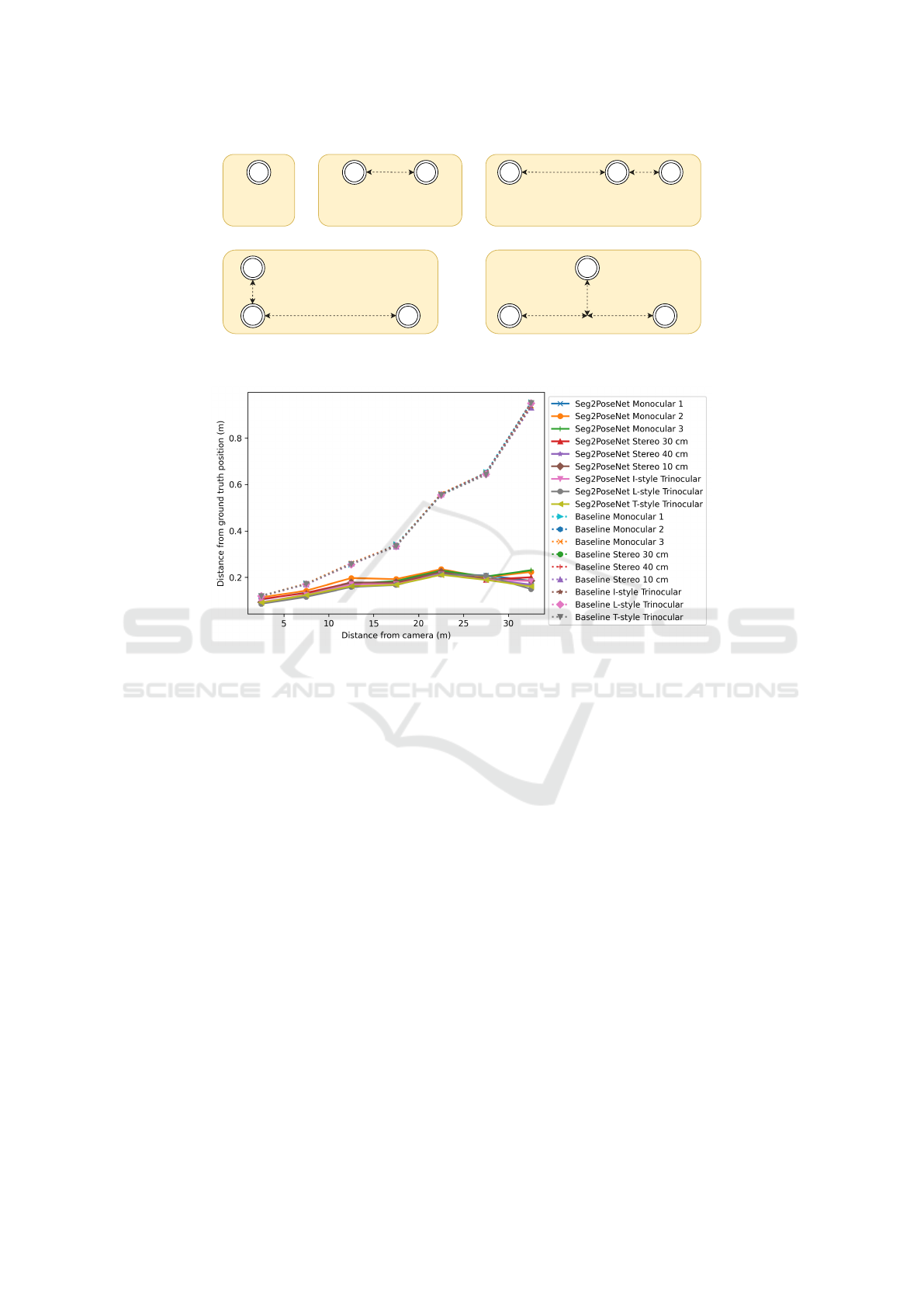
Figure 5: Camera designs used with the CARLA dataset. Multiple stereo cameras with different baselines, as well as three
trinocular designs denoted ’I’, ’L’ and ’T’, were tested. This illustration is not to scale.
Figure 6: Results from the CARLA test set, with errors on the y-axis and distance from the cameras on the x-axis. The
results are presented as averages of all road users 0 to 5 meters from the cameras, 5 to 10 meters from the cameras and so
on. Seg2PoseNet performs better than the baseline methods, especially when further away from the cameras. The differences
between the different camera configurations is small. Best viewed in color.
each training run lasted for 50 epochs. The validation
set was used only for selecting the epoch with lowest
validation loss for testing.
4.1.1 Results
In Figure 6, the positioning error on the test set for the
different camera configurations are shown, as the av-
erage error for all those road users at 0-5 m distance
from the camera, 5-10 m distance from the camera
and so on, to show how well the different configura-
tions work at different distances. We note that when
Seg2PoseNet is applied, the errors decrease compared
to the baseline method which only uses the normal po-
sitions, as expected. A somewhat unexpected result is
that the different camera configurations have a small
impact on the accuracy, and the best performing con-
figuration is actually the largest stereo configuration.
The total average distances are shown in the third col-
umn of Table 1. An example image from the CARLA
dataset is shown in Figure 1.
4.2 Real World Scene
An outdoors area was recorded using an I-style trinoc-
ular camera when cars, bicyclists and pedestrians
moved, instructed to act like in a traffic environment.
The 3D positions of 86 ground points were collected
using a Leica S06 (Leica Geosystems AG, 2009) de-
vice. A specialized camera calibration method for a
trinocular camera (Ahrnbom et al., 2021a) was used,
using the same ground points. Detectron2’s Mask R-
CNN (He et al., 2017; Wu et al., 2019) was used as an
object detector, and SORTS (Ahrnbom et al., 2021b)
was used to create tracks in pixel coordinates for each
road user. Then, these tracks were converted to world
coordinates by the Seg2Pose system.
The video clip, 22 650 frames long (at 24 FPS)
was divided into a training, validation and test set
with 7750 frames in the training set, 7500 frames in
the validation set and 7400 frames in the test set. At
least 150 frames were removed between the sets to
reduce similarity. Seg2PoseNet was trained on the
training set and the validation set was used only for
Seg2Pose: Pose Estimations from Instance Segmentation Masks in One or Multiple Views for Traffic Applications
781
Table 1: Average errors of the different configurations, in
metres, on the CARLA dataset and the real scene. The best
values for each dataset are in bold. The configurations with
“S2PN” are those that use Seg2PoseNet, while those with-
out use the baseline method. For the stereo lengths, the left
number applies to CARLA and the right is the real scene.
Configuration S2PN CARLA Real
Monocular 1 Yes 0.1738 0.1822
Monocular 2 Yes 0.1890 0.1822
Monocular 3 Yes 0.1768 0.1931
Stereo 30/33 cm Yes 0.1734 0.1775
Stereo 40/43 cm Yes 0.1661 0.1812
Stereo 10 cm Yes 0.1742 0.1837
I-style Trinocular Yes 0.1682 0.1791
L-style Trinocular Yes 0.1649 N/A
T-style Trinocular Yes 0.1654 N/A
Monocular 1 No 0.3653 0.4191
Monocular 2 No 0.3655 0.4042
Monocular 3 No 0.3682 0.4181
Stereo 30/33 cm No 0.3641 0.4069
Stereo 40/43 cm No 0.3652 0.4070
Stereo 10 cm No 0.3654 0.4064
I-style Trinocular No 0.3643 0.4045
L-style Trinocular No 0.3623 N/A
T-style Trinocular No 0.3631 N/A
early stopping. The same hyperparameters as in Sec-
tion 4.1 were used. Like in Section 4.1, the network
was trained four times per camera and road user class,
and the weights from the epoch with the lowest vali-
dation loss were used when testing.
The ground truth was collected by manually find-
ing the world coordinate positions by first clicking on
where the road users appear in some frames, and then
manually moving the pose until it looked right. In-
terpolation was applied to save time. T-Analyst soft-
ware (Lund University, Transport and Roads, 2018)
was used to create these annotations.
4.2.1 Results
The average errors are shown as a function of distance
from the cameras in Figure 7. The total average errors
are shown in the rightmost column of Table 1.
A number of images showing results of Seg2Pose
on the test set are shown in Figure 8. It should be
noted that the images shown are not hand-picked and
are reasonably representative of the general perfor-
mance of our system. The system is capable of accu-
rately position road users in the scene in most cases,
and when it fails, it seems to often be due to failures
by Mask R-CNN and SORTS.
5 DISCUSSION
In the CARLA experiments, Seg2PoseNet clearly im-
proves upon the baseline of only using normal po-
sitions, especially at longer distances from the cam-
era(s). When comparing different camera configu-
rations, we note that using more cameras is better
than using fewer, and having them further apart im-
proves performance for the stereo configurations, as
expected. The differences between camera configura-
tions are, however, small.
In the experiments done on real camera record-
ings, it is worth pointing out that the ground truth an-
notations have some noise, and possibly bias, caused
by the human annotation process. In particular, road
users far away from the cameras may suffer from T-
Analyst’s less accurate camera calibration being used,
and it is difficult to determine how much this affects
the results. In addition, the low number of partici-
pants mean that the training and test sets have sig-
nificant similarity. The CARLA dataset was used to
avoid precisely these types of issues. We believe these
issues contribute to add noise that partially hides that
more using camera views should improve positioning.
Randomness in training could also contribute, despite
the effort taken to reduce it.
In this work, we have treated using only normal
positions as our baseline method, and this could use
some clarification and motivation. Most previous
traffic surveillance research uses simple methods for
converting pixel coordinates to world coordinates be-
cause it is not the focus of their work, and it is known
that these approximate methods work well enough for
some applications. There is no “standard method”,
making it difficult to select a representative baseline.
We believe the normal positions are better than most
existing systems, because they do not assume that the
ground is perfectly flat, and since they use the center
point of an AABB rather than the bottom point, com-
monly assumed to lie on the ground. This means, for
example, that it works for road users seen mostly from
above, something that occurs in both the datasets.
One of the benefits of using segmentation masks
as the input of Seg2PoseNet, as opposed to RGB
images, is that Seg2PoseNet could be more easily
trained on synthetic data placed into real scenes, as
explained in Section 3.5. This could be further im-
proved by using more realistic and varied 3D mod-
els, such as the ones used in the CARLA dataset.
We would like to experiment with such an approach
in the future. Perhaps it is possible to fully train
Seg2PoseNet without any dataset annotations, using
only camera calibration, ground points and synthetic
road user models.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
782
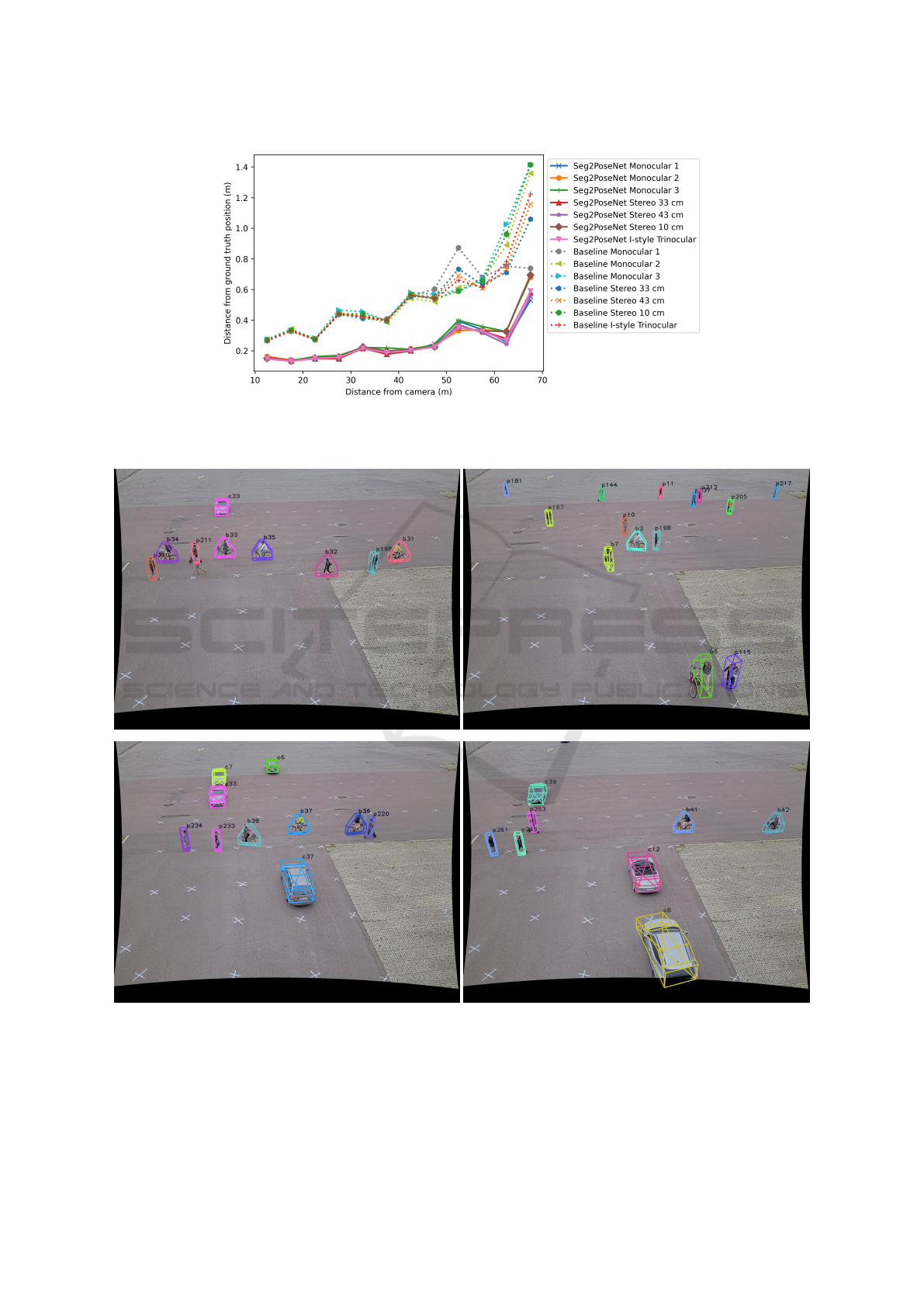
Figure 7: Results from the real video’s test set. The format is the same as in Figure 6. The configurations using Seg2Pose
outperform the baselines significantly, by a factor of about two. With Seg2PoseNet, the average error remains close to 20 cm
up to almost 50 m distance from the cameras. The differences between different camera configurations are small.
Figure 8: Results of Seg2PoseNet on the test set of the real video, when using an I-style Trinocular camera configuration.
World coordinate tracks are shown by simplified 3D shapes, with unique IDs for each track, shown alongside a ’c’ (car), ’p’
(pedestrian) or ’b’ (bicyclist). Sometimes, Mask R-CNN or SORTS fails to locate a road user, like one of the pedestrians in
the top left image. Rarely, classification fails like “bicyclist” 32 in the top left image, which is likely due to an error in the
logic that combines a bicycle and person detected by Mask R-CNN into a bicyclist. The Seg2Pose system works as intended
for most road users in most frames. Note that scooters, like “pedestrian” 220 in the bottom left image, are currently classified
as pedestrians, as Mask R-CNN trained on MS COCO (Lin et al., 2014) does not recognize scooters. Best viewed in color.
Seg2Pose: Pose Estimations from Instance Segmentation Masks in One or Multiple Views for Traffic Applications
783

6 CONCLUSION
We present a system called Seg2Pose for converting
instance segmentation tracks into world coordinate
pose tracks for road users in static surveillance cam-
eras. The system uses our novel CNN, Seg2PoseNet,
which we show outperforms the baseline of only us-
ing normal positions on both synthetic data from
CARLA Simulator and a real world video, approx-
imately cutting the positioning errors in half. We
further show that stereo and trinocular cameras im-
prove accuracy on the CARLA dataset slightly, but
this trend is not clearly shown in our experiments with
real data.
ACKNOWLEDGEMENTS
This research was funded by VINNOVA project
2017-05510 “The Third Eye”.
REFERENCES
Ahrnbom, M., Nilsson, M., Ard
¨
o, H.,
˚
Astr
¨
om, K.,
Yastremska-Kravchenko, O., and Laureshyn, A.
(2021a). Calibration and absolute pose estimation of
trinocular linear camera array for smart city applica-
tions. In 2020 25th International Conference on Pat-
tern Recognition (ICPR), pages 103–110.
Ahrnbom, M., Nilsson, M., and Ard
¨
o, H. (2021b). Real-
time and online segmentation multi-target tracking
with track revival re-identification. In VISIGRAPP (5:
VISAPP), pages 777–784.
Bradler, H., Kretz, A., and Mester, R. (2021). Urban traf-
fic surveillance (uts): A fully probabilistic 3d tracking
approach based on 2d detections. In IEEE Intelligent
Vehicles Symposium, IV 2021, Nagoya, Japan, July 11
- July 17, 2021. IEEE.
Brazil, G., Pons-Moll, G., Liu, X., and Schiele, B. (2020).
Kinematic 3d object detection in monocular video. In
In Proceeding of European Conference on Computer
Vision, Virtual.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). CARLA: An open urban driving
simulator. In Proceedings of the 1st Annual Confer-
ence on Robot Learning, pages 1–16.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
Hodan, T., Barath, D., and Matas, J. (2020). Epos: Estimat-
ing 6d pose of objects with symmetries. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition (CVPR).
Jensen, M., Ahrnbom, M., Kruithof, M.,
˚
Astr
¨
om, K., Nils-
son, M., Ard
¨
o, H., Laureshyn, A., Johnsson, C.,
and Moeslund, T. (2019). A framework for auto-
mated analysis of surrogate measures of safety from
video using deep learning techniques. In Transporta-
tion Research Board. Annual Meeting Proceedings,
pages 281–306. Transportation Research Board Na-
tional Cooperative Highway Research Program. Con-
ference date: 13-01-2019 Through 17-01-2019.
Kumar, A., Brazil, G., and Liu, X. (2021). Groomed-
nms: Grouped mathematically differentiable nms for
monocular 3d object detection. In In Proceeding
of IEEE Computer Vision and Pattern Recognition,
Nashville, TN.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Doll
´
ar, P., and Zitnick, C. L. (2014). Mi-
crosoft COCO: Common Objects in Context. In Com-
puter Vision – ECCV 2014, pages 740–755. Springer
International Publishing.
Muller, N., Wong, Y.-S., Mitra, N. J., Dai, A., and Nießner,
M. (2021). Seeing behind objects for 3d multi-object
tracking in rgb-d sequences. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 6071–6080.
Leica Geosystems AG (2009). Leica S06 Specification.
https://w3.leica-geosystems.com/downloads123/
zz/tps/FlexLine%20TS06/brochures-datasheet/
FlexLine TS06 Datasheet en.pdf.
Lund University, Transport and Roads (2018). T-analyst.
https://bitbucket.org/TrafficAndRoads/tanalyst/wiki/
Manual.
Wu, Y., Kirillov, A., Massa, F., Lo, W.-Y., and Gir-
shick, R. (2019). Detectron2. https://github.com/
facebookresearch/detectron2.
Yang, F., Chang, X., Dang, C., Zheng, Z., Sakti, S.,
Nakamura, S., and Wu, Y. (2020). Remots: Self-
supervised refining multi-object tracking and segmen-
tation. arXiv preprint arXiv:2007.03200.
Yin, T., Zhou, X., and Krahenbuhl, P. (2021). Center-based
3d object detection and tracking. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 11784–11793.
Zakharov, S., Shugurov, I., and Ilic, S. (2019). Dpod: 6d
pose object detector and refiner. In Proceedings of
the IEEE/CVF International Conference on Computer
Vision, pages 1941–1950.
Zhang, B. and Zhang, J. (2020). A traffic surveillance
system for obtaining comprehensive information of
the passing vehicles based on instance segmentation.
IEEE Transactions on Intelligent Transportation Sys-
tems, pages 1–16.
Zhang, S., Wang, C., He, Z., Li, Q., Lin, X., Li, X., Zhang,
J., Yang, C., and Li, J. (2020). Vehicle global 6-dof
pose estimation under traffic surveillance camera. IS-
PRS Journal of Photogrammetry and Remote Sensing,
159:114–128.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
784
