
Evaluation of a Local Descriptor for HDR Images
Artur Santos Nascimento
a
, Welerson Augusto Lino de Jesus Melo
b
,
Beatriz Trinch
˜
ao Andrade
c
and Daniel Oliveira Dantas
d
Departamento de Computac¸
˜
ao, Universidade Federal de Sergipe, S
˜
ao Crist
´
ov
˜
ao, SE, Brazil
Keywords:
High Dynamic Range Images, Feature Point Detection, Feature Point Description.
Abstract:
Feature point (FP) detection and description are processes that detect and extract characteristics from images.
Several computer vision applications rely on the usage of FPs. Most FP descriptors are designed to support low
dynamic range (LDR) images as input. However, high dynamic range (HDR) images can show details in bright
and shadowed areas that LDR images can not. For that reason, the interest in HDR imagery as input in the
detection and description processes has been increasing. Previous studies have explored FP detectors in HDR
images. However, none have presented FP descriptors designed for HDR images. This study compares the FP
matching performance of description vectors generated from LDR and HDR images. The FPs were detected
and described using a version of the SIFT algorithm adapted to support HDR images. The FP matching
performance of the algorithm was evaluated with the mAP metric. In all cases, using HDR images increased
the mAP values when compared to LDR images.
1 INTRODUCTION
In computer vision, characteristics are image regions
with properties such as lines, borders, or high con-
trast. These characteristics are extracted in two steps:
detection and description of feature points (FP). Ap-
plications such as object recognition, scene recon-
struction, and biometric systems rely on FP detection
and description (Andrade et al., 2012; Schmid et al.,
2000; Se et al., 2002).
Detection algorithms search for image FPs that
can be found even when the image undergoes geo-
metric or photometric transformations. Based on the
image and its FPs, description algorithms extract dis-
criminative invariant signatures from these FPs that
can identify and distinguish a given FP from an-
other (Rana et al., 2019). If a description is good
enough, it can identify the same FP in a different cap-
ture of the same scene.
Most detection and description algorithms receive
low dynamic range (LDR) images as input. An LDR
image usually has 8 bits per sample. Thus, the color
intensity values are limited to integers in the range
a
https://orcid.org/0000-0003-0419-6170
b
https://orcid.org/0000-0003-0644-2427
c
https://orcid.org/0000-0002-1407-8250
d
https://orcid.org/0000-0002-0142-891x
[0, 255]. For this reason, scenes with substantial light-
ing variation can result in underexposed and overex-
posed areas. In these cases, detectors and descriptors
may fail as details are hidden by bright or shadowed
areas.
On the other hand, HDR images use more than 8
bits per sample, allowing a higher dynamic range and
greater color accuracy in the overexposed and under-
exposed areas. Knowing that feature extraction from
a scene is highly dependent on the scene lighting at
capture time, this study hypothesizes that the FP de-
scription will detect more FPs, especially in bright or
shadowed areas.
Previous studies have evaluated FP detection and
shown that FP detection performance improves when
using HDR images as input (Melo et al., 2018; Os-
tiak, 2006). Therefore, detection algorithms adapted
for HDR images were created, such as Harris Cor-
ner for HDR and DoG for HDR (Melo et al., 2018).
However, few studies have evaluated FP descriptors
that use HDR images as input.
In this context, this study evaluates and compares
the FP description and FP matching performance in
HDR and LDR images. Using the mean average pre-
cision (mAP) metric, two datasets, and an adapted
version of the SIFT algorithm, we observed that using
HDR images as input increased the mAP by 81.80%
(from 0.22 to 0.40) with the first dataset (3D lighting),
Nascimento, A., Melo, W., Andrade, B. and Dantas, D.
Evaluation of a Local Descriptor for HDR Images.
DOI: 10.5220/0010779700003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
299-306
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
299

and by 61.50% (from 0.39 to 0.63) with the second
one (2D lighting).
This paper is organized as follows. Section 2 de-
scribes the related works. Section 3 briefly describes
the SIFT algorithm. Section 4 describes the dataset
used, the evaluation metric, and the proposed method-
ology. Section 5 shows the experimental results. The
conclusions are drawn in Section 6.
2 RELATED WORKS
The number of studies using HDR and tone-mapped
images as input for detection and description algo-
rithms is significantly smaller than those using LDR
images as input. In this section, we classify stud-
ies that use HDR and tone-mapped images into four
groups: studies that propose datasets with complex
lighting configurations and that offer captures in both
LDR and HDR formats; studies focused on FP de-
tection algorithms; studies focused on FP description
algorithms; and studies that adapt FP detection or de-
scription algorithms for specific applications.
2.1 Datasets
P
ˇ
ribyl (P
ˇ
ribyl et al., 2012) studied the use of tone
mapping (TM) in HDR images to improve FP detec-
tion. The main idea is to capture more details in re-
gions that conventional LDR images can not correctly
represent due to the lack of details in bright and shad-
owed areas of the scene. There is no need to change
the detection algorithms in this approach as the TM
algorithm maps the tones from the HDR image into
an LDR image.
With that in mind, P
ˇ
ribyl generated a dataset
whose images have abrupt lighting changes. Two
scenes were captured: a planar scene (2D) contain-
ing three posters in A4 sheet format; and a 3D scene
containing several non-planar rigid objects. Both
scenes were placed in a dark room with controlled
lighting. The scenes were captured in three different
sequences, consisting of changing viewpoints, dis-
tances, and lighting.
• Viewpoint Changing Sequence: the camera is
moved following a circular trajectory with its cen-
ter in the scene with a step of 2.5
◦
. Thereby, 21
captures were made, resulting in a 50
◦
total tra-
jectory;
• Distance Changing Sequence: the scene was
captured seven times and the distance between
the camera and the scene increased progressively,
yielding the distance sequence of 100 cm, 103 cm,
109 cm, 122 cm, 147 cm, 197 cm, and 297 cm;
• Lighting Changing Sequence: the scene was
also captured seven times, each time with a dif-
ferent combination of three light sources being on
or off, with at least one of them on.
They conclude that images generated from local
TM algorithms give better results than images from
global TM algorithms when used as input to the fea-
ture detection process (P
ˇ
ribyl et al., 2012).
In order to produce a series of studies exploring
the use of TM in HDR images to improve the detec-
tion and description processes, Rana et al. (Rana et al.,
2015) proposed a new dataset. They also evaluated
TM algorithms not considered by P
ˇ
ribyl et al. (P
ˇ
ribyl
et al., 2012).
The dataset proposed by Rana et al. consists of
two capture sequences, named project room sequence
(PRS) and light room sequence (LRS). PRS is com-
posed of eight different lighting configurations cre-
ated by blocking light coming from a projector with
the help of different objects. The scene is composed
of several bright and dark-colored objects arranged
to create sharp shadows and bright areas. LRS com-
prises seven different natural lighting conditions cre-
ated by changes in global lighting through the open-
ing and closing of window blinds, room ambient illu-
mination, and diffuse lighting from a tungsten lamp.
In this scene configuration, there are also dark and
light objects with different types of surfaces.
2.2 FP Detection Algorithms
P
ˇ
ribyl et al. (P
ˇ
ribyl et al., 2016) use the dataset pro-
posed in their previous studies (P
ˇ
ribyl et al., 2012)
to expand their evaluation of the impact of TM dur-
ing FP detection. They include more TM algorithms
and the DoG detection algorithm in their experiments.
The conclusion is that the TM algorithms proposed
by Fattal et al. (Fattal et al., 2002) and Mantiuk et
al. (Mantiuk et al., 2006) detect more FPs than other
ones.
Two studies by Rana et al. focus on FP detec-
tion. In the first study (Rana et al., 2016b), Rana
et al. propose a TM operator to optimize FP detec-
tion. As a result, using their TM operator improves
the correlation coefficient (CC) and repeatability rate
(RR) compared to other TM operators. In the second
study (Rana et al., 2017a), Rana et al. develop a new
adaptive local TM operator that uses support vector
regression (SVR) to predict optimal modulation maps
to improve FP detection. As a result, the TM operator
by Rana et al. showed better RR when compared to
other TM operators.
Melo et al. propose a modification for FP detec-
tors in order to improve FP detection on HDR images.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
300

A local mask based on the coefficient of variation
(CoV) of sets of pixels is proposed as an additional
step in FP detection. Also, the Uniformity metric is
introduced as a new criterion to evaluate FP detection
in areas under different lighting intensities. The ob-
tained results show better uniformity and repeatabil-
ity rate in most tested HDR images when compared
to standard FP detectors. Moreover, they indicate that
HDR images have great potential to be explored in
applications that rely on FP detection (Melo et al.,
2018).
2.3 FP Description Algorithms
There are several studies from Rana et al. (Rana et al.,
2016a; Rana et al., 2017b; Rana et al., 2019) fo-
cused on image description based on HDR images.
The first one (Rana et al., 2016a) compared image
matching using TM in HDR images and LDR images
using SIFT (Lowe, 2004), SURF (Bay et al., 2008),
FREAK (Alahi et al., 2012), and BRISK (Leuteneg-
ger et al., 2011) to describe the FPs. By using sev-
eral global and local TM algorithms, it is observed
that all combinations that used tone-mapped images
as input performed better than with LDR images. In
their second study (Rana et al., 2017b), Rana et al.
proposed an adaptive TM operator that uses SVR to
predict optimal modulation maps to improve FPs de-
scription, specifically to make image matching invari-
ant to day or night scene illumination. Finally, in the
third study (Rana et al., 2019), Rana et al. used the
adaptive TM operator to improve FP description in
image matching.
Khwildi and Zaid (Khwildi and Zaid, 2018) in-
troduce a descriptor based on LDR image expansion.
In this approach, the LDR image is converted to an
HDR image using a reverse TM operator (TM-HDR
image). Then, the resulting TM-HDR image is tone
mapped back to LDR image (TM-LDR) and SIFT de-
scriptor is used to describe FPs. As a result, it is
demonstrated that features described from the TM-
LDR image are more descriptive than those extracted
from LDR and TM-HDR images. In future works,
they consider exploring local TMs and improving the
efficiency of local descriptors directly in HDR im-
ages.
2.4 Applications
Ige et al. (Ige et al., 2016) developed a facial expres-
sion recognition algorithm using support vector ma-
chines (SVMs) and local binary patterns (LBP). First,
a TM algorithm is used to convert HDR into LDR
images. Then, the resulting tone-mapped image is
used as input to the SURF algorithm. Finally, the
tone-mapped images and the LDR images are com-
pared. As a result, the approach using tone-mapped
images showed better results than LDR images. Tone-
mapped images reach 79.8% accuracy, while the tra-
ditional methods that use LDR images range between
31.3% and 70.8% accuracy.
Ostiak et al. (Ostiak, 2006) used HDR images
to execute an image stitching process to generate a
panorama. In their study, a tone-mapped panorama is
generated to make the shadowed and bright areas of
the image visible. They mention a modification of the
SIFT algorithm to describe FPs in HDR images with-
out giving further details. The discussion is based on
a visual analysis of the generated panoramas, and the
results are subjective. The algorithm presents a better
performance in static scenes than in dynamic scenes,
when stitching shadowed and bright areas that are not
visible in LDR images.
The related works show that FP detection and de-
scription using HDR images as input is a field yet
to be explored. Most HDR-related studies use tone-
mapped images generated from HDR. Tone-mapped
images bring more details in shadowed and bright ar-
eas than LDR images and there is no need to adjust
detection and description algorithms.
On the other hand, few studies using HDR im-
ages as input were found and just Melo et al. (Melo
et al., 2018) detailed the modifications made in their
FP detection algorithm to support HDR images. Us-
ing HDR images brings more information but requires
adaptations in detection and description algorithms to
support floating-point values used to represent pixels.
All studies showed improvements when using
tone-mapped images as input to the detection and de-
scription algorithms. Specifically, Melo et al. (Melo
et al., 2018) showed that using HDR images as input
resulted in better detection performance in terms of
repeatability rate and uniformity, especially in shad-
owed areas of the image.
3 SIFT
The Scale Invariant Feature Transform (SIFT) de-
tects and describes FPs from an image. SIFT is one
of the most popular FP extractors, invariant to scale
and orientation (Rey Otero and Delbracio, 2014), and
shows good performance in detection and extraction,
as shown in various studies (P
ˇ
ribyl et al., 2016; Rana
et al., 2016a; Rana et al., 2017a; Rana et al., 2017b;
Rana et al., 2019).
To detect the FPs, SIFT creates an image represen-
tation from the input image called scale-space, which
Evaluation of a Local Descriptor for HDR Images
301
consists of a collection of increasingly blurred im-
ages. Each FP consists of a blob-like structure whose
coordinates (x, y) and characteristic scale σ are lo-
cated with subpixel accuracy. SIFT calculates the
dominant orientation Θ of each FP detected. In this
way, the tuple (x, y, σ, Θ) defines the center, size, and
orientation of a normalized patch where the descrip-
tion vector is computed. The SIFT detector is known
as Difference of Gaussian (DoG).
The SIFT description vector has 128 dimensions
and is built from a histogram of local gradient direc-
tions around the FP. The local neighborhood size is
normalized to obtain scale-invariance in the descrip-
tion. Next, a dominant orientation in the FP neigh-
borhood is calculated and used to orient the grid over
which the histogram is determined to make the de-
scription rotation-invariant. The SIFT FP description
vector is theoretically invariant to image translation,
rotation and scale changes (Lowe, 2004; Rey Otero
and Delbracio, 2014).
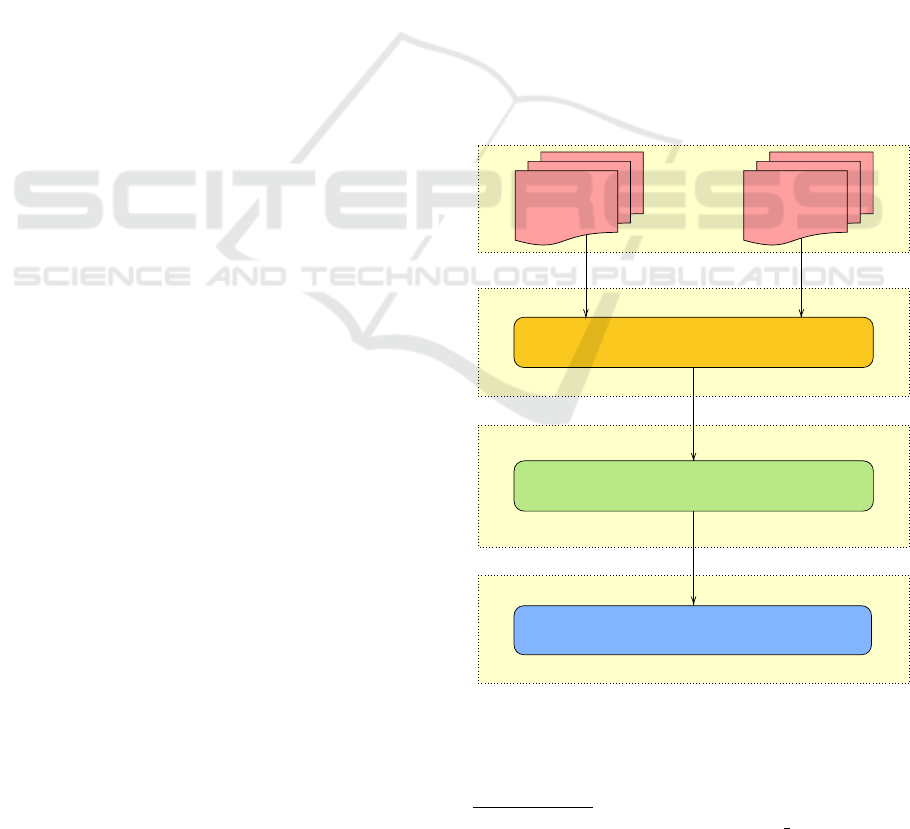
4 METHODS
To evaluate and compare FP description when using
LDR and HDR images, we chose datasets that pro-
vide scenes with complex lighting and scene captures
(i.e. images with bright and shadowed areas) in both
LDR and HDR formats (Section 4.1). We performed
the FP detection and the description of the images in
the LDR and HDR datasets using an adapted version
of SIFT (Section 4.2). Finally, we matched FPs from
pairs of images and evaluated the matching perfor-
mance (Section 4.3). Figure 1 illustrates the pipeline
of the experiment.
4.1 Dataset
The datasets by Rana et al. (Rana et al., 2015) and
P
ˇ
ribyl (P
ˇ
ribyl et al., 2012) were the only datasets
found that explore complex lighting configurations
and are publicly available (Section 2.1). Those
datasets are composed of a series of captures, each
one made with a different shutter speed. The faster
is the shutter, the darker the obtained photo is, as
the camera sensor is less stimulated. The algorithm
by Debevec and Malik (Debevec and Malik, 2008)
uses this collection of captures with different shutter
speeds to generate the HDR image of the scene. In
each collection, the LDR sample image is acquired
with automatic exposure.
We chose to use the dataset by P
ˇ
ribyl et al. (P
ˇ
ribyl
et al., 2012), which consists of two scenes: a planar
scene (2D) containing three posters in A4 sheet for-
mat; and a volumetric (3D) scene containing several
non-planar rigid objects. Both scenes were placed in
a dark room with controlled lighting. As we are in-
terested in investigating the effect of lighting changes
in images with different dynamic ranges, in this study,
we use the lighting changing sequence of both 2D and
3D datasets by P
ˇ
ribyl (P
ˇ
ribyl et al., 2012).
4.2 FP Detection and Description
We used as FP detector the SIFT detection step,
known as DoG. Minor changes were made in DoG
to support 32-bit floating point pixel values. In
this study, we adopt the approach used by Rana et
al. (Rana et al., 2015) and Melo et al. (Melo et al.,
2018), i.e., to select the 500 FPs with strongest re-
sponses of each detector.
To describe the FPs, the SIFT description step
was adapted to receive both LDR and HDR images.
HDR images were converted to a common interval of
[0.0, 255.0], using floating-point instead of unsigned
char, and the description of the best 500 FPs was gen-
erated. The implementation is available at GitHub
1
.
Dataset
DetectionDescriptionEvaluation
Adapted SIFT detector (DoG)
Adapted SIFT descriptor
Matching and evaluation
LDR
images
HDR
images
Figure 1: Flowchart representing the executed pipeline.
1
https://github.com/welersonMelo/TCC UFS/
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
302

4.3 Matching and Evaluation
Our aim is to evaluate if the description using HDR
images is better than the description generated using
conventional LDR images. The most common way to
do that is by matching description vectors from differ-
ent captures of the same scene. To do that, the 500 FPs
with strongest responses from each detector were se-
lected. This approach was used in other studies (Rana
et al., 2016a; Melo et al., 2018).
To evaluate the description matching, we com-
puted a precision-recall (PR) curve (Mikolajczyk and
Schmid, 2005; Rana et al., 2016a). The PR curve is
based on the true and false matches between FPs from
a pair of images. The description of a FP is usually
represented by a vector that encapsulate its character-
istics (description vector). Given a description vector,
we have a match if the nearest neighbor distance ra-
tio (NNDR) criteria is satisfied. In this criteria, a good
match occurs when the ratio between its distance from
the first best match (d
BM1
) and the second best match
(d
BM2
) is less than a given threshold th (Equation 1).
The threshold is defined by testing the value that best
fits the dataset used (Lowe, 2004). We use 0.7 as
threshold and the Euclidean distance to compute the
distance between two description vectors.
NNDR =
d
BM1
d
BM2
< th (1)
Two description vectors are considered to have a
true positive match if they correspond to two FPs that
are repeated in the reference and test images. A test
FP is considered repeated if it lies in a circle of ra-
dius r centered on the projection of the reference FP
onto the test image. In our case, we considered r = 5.
Analogously, a match is considered a false positive if
the corresponding FPs are not repeated.
To compute the PR curve, we need the recall and
precision values. Recall is defined by Equation 3 and
precision by Equation 2, where tp, fp, and fn refer to
numbers of true positives, false positives, and false
negatives respectively. By varying the threshold th,
we draw a PR curve and measure the area under this
curve. The value of the area under the curve is also
known as average precision (AP). The mean of APs
for all possible image pairs from a dataset is called
mean average precision (mAP) (Rana et al., 2016a).
P =
tp
tp + fp
(2)
R =
tp
tp + fn
(3)
5 RESULTS
The first step was to detect the FPs of the LDR and
HDR databases using the DoG detector. Then, the
description vectors of the FPs was calculated using
the adapted SIFT descriptor. For each dataset, FPs
from every possible pair of images were matched. As
each dataset has seven captures, 21 pairs of images
were considered for each dataset.
Afterwards, we obtained the PR curve and AP val-
ues of each pair of images. Table 1 shows the AP val-
ues of the DoG detector applied to LDR and HDR im-
ages from the 2D lighting dataset. Table 2 shows the
AP values of the adapted SIFT algorithm applied to
LDR and HDR images from the 3D lighting dataset.
With the AP values in hand, we calculated the
mAP of the FP matching. The last lines of Tables 1
and 2 show the calculated mAP values from descrip-
tion vectors generated by the adapted SIFT algorithm.
The mAP values are in the interval [0.0, 1.0]. Higher
values are better. Matching results show an improve-
ment of 61.50% in 2D lighting dataset and 81.80% in
3D lighting dataset when using HDR instead of LDR
images.
Figures 2, 3, 4 and 5 show examples of FP match-
ing using LDR and HDR images respectively from the
2D lighting dataset. Green lines are correct matches
and red lines are incorrect matches.
6 CONCLUSIONS
In this study, we evaluated the use of HDR images as
input to an FP extraction pipeline. Although previous
studies have explored FP detectors in HDR images,
none have presented FP descriptors designed for HDR
images. This study compares the FP matching per-
formance of description vectors generated from LDR
and HDR images. The code of the proposed SIFT de-
tector and descriptor are available at GitHub. Using
P
ˇ
ribyl et al. dataset (P
ˇ
ribyl et al., 2012), the SIFT
algorithm adapted to support HDR images, and the
mAP metric, we evaluated if the usage of HDR im-
ages improves the performance of FP matching.
Using HDR images to describe FPs significantly
improved the FP matching. The adapted SIFT al-
gorithm, when applied to HDR instead of LDR im-
ages, increased the mAP by 61.50% in the 2D light-
ing dataset and by 81.80% in the 3D lighting dataset.
This advocates that using HDR images can improve
description performance.
The usage of HDR images as input in FP descrip-
tion algorithms is an area yet to be explored, as there
are few studies about this topic in the literature. Fu-
Evaluation of a Local Descriptor for HDR Images
303

Table 1: Average precision in 2D lighting dataset using pairs of LDR and HDR images.
2D lighting LDR average Precision 2D lighting HDR average precision
Image Label 2 3 4 5 6 7 2 3 4 5 6 7
1 0.38 0.14 0.39 0.74 0.53 0.72 0.80 0.21 0.75 0.88 0.88 0.87
2 – 0.10 0.16 0.43 0.60 0.41 – 0.19 0.65 0.73 0.88 0.77
3 – – 0.39 0.29 0.12 0.28 – – 0.31 0.24 0.36 0.25
4 – – – 0.40 0.22 0.38 – – – 0.75 0.70 0.66
5 – – – – 0.42 0.72 – – – – 0.82 0.89
6 – – – – – 0.45 – – – – – 0.79
mAP 0.39 0.63
Table 2: Average precision in 3D lighting dataset using pairs of LDR and HDR images.
3D lighting LDR average Precision 3D lighting HDR average precision
Image Label 2 3 4 5 6 7 2 3 4 5 6 7
1 0.16 0.17 0.04 0.07 0.18 0.25 0.58 0.67 0.03 0.16 0.55 0.68
2 – 0.48 0.03 0.05 0.58 0.53 – 0.84 0.03 0.17 0.85 0.80
3 – – 0.01 0.04 0.59 0.75 – – 0.03 0.17 0.77 0.87
4 – – – 0.06 0.04 0.08 – – – 0.03 0.12 0.08
5 – – – – 0.06 0.02 – – – – 0.10 0.12
6 – – – – – 0.61 – – – – – 0.80
mAP 0.22 0.40
Figure 2: Example of FP matching using 2D lighting dataset and LDR images.
Figure 3: Example of FP matching using 2D lighting dataset and HDR images.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
304

Figure 4: Example of FP matching using 3D lighting dataset
and LDR images.
Figure 5: Example of FP matching using 3D lighting dataset
and HDR images.
ture works may include testing and evaluating the
performance of alternative detectors and descriptors
applied to HDR images and comparing the adapted
SIFT algorithm with methods that use tone mapping.
Other metrics may also be used, such as repeatability
rate and uniformity.
REFERENCES
Alahi, A., Ortiz, R., and Vandergheynst, P. (2012). Freak:
Fast retina keypoint. In 2012 IEEE Conference on
Computer Vision and Pattern Recognition, pages 510–
517.
Andrade, B. T., Mendes, C. M., de Oliveira Santos Jr, J.,
Bellon, O. R. P., and Silva, L. (2012). 3d preserv-
ing xviii century barroque masterpiece: Challenges
and results on the digital preservation of Aleijadinho’s
sculpture of the prophet joel. Journal of Cultural Her-
itage, 13(2):210–214.
Bay, H., Ess, A., Tuytelaars, T., and Van Gool, L. (2008).
Speeded-up robust features (surf). Computer Vision
and Image Understanding, 110(3):346–359. Similar-
ity Matching in Computer Vision and Multimedia.
Debevec, P. E. and Malik, J. (2008). Recovering high dy-
namic range radiance maps from photographs. In
ACM SIGGRAPH 2008 Classes, SIGGRAPH ’08,
New York, NY, USA. Association for Computing Ma-
chinery.
Fattal, R., Lischinski, D., and Werman, M. (2002). Gradi-
ent domain high dynamic range compression. In Pro-
ceedings of the 29th annual conference on Computer
graphics and interactive techniques, pages 249–256.
Ige, E. O., Debattista, K., and Chalmers, A. (2016). To-
wards HDR based facial expression recognition under
complex lighting. In Proceedings of the 33rd Com-
puter Graphics International, CGI ’16, page 49–52,
New York, NY, USA. Association for Computing Ma-
chinery.
Khwildi, R. and Zaid, A. O. (2018). A new retrieval system
based on low dynamic range expansion and sift de-
scriptor. In 2018 IEEE 20th International Workshop
on Multimedia Signal Processing (MMSP), pages 1–6.
IEEE.
Leutenegger, S., Chli, M., and Siegwart, R. Y. (2011).
Brisk: Binary robust invariant scalable keypoints. In
2011 International Conference on Computer Vision,
pages 2548–2555.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International journal of computer
vision, 60(2):91–110.
Mantiuk, R., Myszkowski, K., and Seidel, H.-P. (2006). A
perceptual framework for contrast processing of high
dynamic range images. ACM Transactions on Applied
Perception (TAP), 3(3):286–308.
Melo, W. A. L. J., de Tavares, J. A. O., Dantas, D. O.,
and Andrade, B. T. (2018). Improving feature point
detection in high dynamic range images. In 2018
IEEE Symposium on Computers and Communications
(ISCC), pages 00091–00096. IEEE.
Mikolajczyk, K. and Schmid, C. (2005). A perfor-
mance evaluation of local descriptors. IEEE trans-
actions on pattern analysis and machine intelligence,
27(10):1615–1630.
Ostiak, P. (2006). Implementation of HDR panorama stitch-
ing algorithm. In Proceedings of the 10th CESCG
Conference, pages 24–26. Citeseer.
P
ˇ
ribyl, B., Chalmers, A., and Zem
ˇ
c
´
ık, P. (2012). Feature
point detection under extreme lighting conditions. In
Proceedings of the 28th Spring Conference on Com-
puter Graphics, pages 143–150.
P
ˇ
ribyl, B., Chalmers, A., Zem
ˇ
c
´
ık, P., Hooberman, L., and
ˇ
Cad
´
ık, M. (2016). Evaluation of feature point detec-
tion in high dynamic range imagery. Journal of Visual
Communication and Image Representation, 38:141–
160.
Rana, A., Valenzise, G., and Dufaux, F. (2015). Evalua-
tion of feature detection in HDR based imaging un-
der changes in illumination conditions. In 2015 IEEE
International Symposium on Multimedia (ISM), pages
289–294.
Evaluation of a Local Descriptor for HDR Images
305

Rana, A., Valenzise, G., and Dufaux, F. (2016a). An eval-
uation of HDR image matching under extreme illumi-
nation changes. In 2016 Visual Communications and
Image Processing (VCIP), pages 1–4.
Rana, A., Valenzise, G., and Dufaux, F. (2016b). Optimiz-
ing tone mapping operators for keypoint detection un-
der illumination changes. In 2016 IEEE 18th Inter-
national Workshop on Multimedia Signal Processing
(MMSP), pages 1–6.
Rana, A., Valenzise, G., and Dufaux, F. (2017a). Learning-
based adaptive tone mapping for keypoint detection.
In 2017 IEEE International Conference on Multime-
dia and Expo (ICME), pages 337–342.
Rana, A., Valenzise, G., and Dufaux, F. (2017b). Learning-
based tone mapping operator for image matching. In
2017 IEEE International Conference on Image Pro-
cessing (ICIP), pages 2374–2378.
Rana, A., Valenzise, G., and Dufaux, F. (2019). Learning-
based tone mapping operator for efficient image
matching. IEEE Transactions on Multimedia,
21(1):256–268.
Rey Otero, I. and Delbracio, M. (2014). Anatomy of the
SIFT Method. Image Processing On Line, 4:370–396.
https://doi.org/10.5201/ipol.2014.82.
Schmid, C., Mohr, R., and Bauckhage, C. (2000). Evalua-
tion of interest point detectors. International Journal
of computer vision, 37(2):151–172.
Se, S., Lowe, D., and Little, J. (2002). Global localization
using distinctive visual features. In IEEE/RSJ inter-
national conference on intelligent robots and systems,
volume 1, pages 226–231. IEEE.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
306
