
Development of a Platform-independent Renderer for the Rendering of
OpenStreetMap Indoor Maps in Flutter
Julia Richter
a
, Robin Thomas
b
, David Lange
c
, Thomas Graichen
d
and Ulrich Heinkel
e
Professorship Circuit and System Design, Chemnitz University of Technology,
Reichenhainer Straße 70, Chemnitz, Germany
Keywords:
OpenStreetMap, Indoor Maps, Rendering, Mapsforge, Flutter, Cross-platform, Open Data, Open Source.
Abstract:
With the development and spread of new localisation technologies, the construction of bigger buildings, as
well as the continuous growth of digitalisation, the importance of indoor maps rises. However, developers who
want to make use of indoor maps face several obstacles. Among them are the often costly data acquisition, the
increased development overhead for diverse platforms, plus the missing support of indoor rendering in many
libraries. In this work, the development of a free solution for platform-independent rendering of indoor data
is presented based on public geodata that is provided by OpenStreetMap. For this goal, existing open source
technologies such as the Flutter toolkit and the Mapsforge library were used in order to develop a flexible and
freely accessible rendering engine that directly integrates in outdoor maps and leads to a seamless rendering
of both indoor and outdoor in one map view. To prove platform independence and to measure performance, a
prototype app was developed in Flutter. Finally, possibilities and limitations of this approach were examined
in more detail.
1 INTRODUCTION
Indoor maps and navigation are particularly relevant
for larger buildings such as airports, railway stations,
hospitals, multi-storey car parks or shopping centres
(OpenStreetMap Contributors, 2021a). In many in-
door applications, various interdisciplinary areas in-
tertwine. These include localisation, but also the ac-
quisition and provision of geodata. This is usu-
ally done by companies such as Mazemap (MazeMap,
2020), Here (Here, 2021) or Carto (CARTO, 2021).
Such processes and services are complex and as-
sociated with costs, so that this data is typically
not made freely available. An alternative to the
companies mentioned is the community-managed
OpenStreetMap (OSM) (OpenStreetMap Contribu-
tors, 2021b). Since all data is made freely available,
this is especially interesting for smaller companies,
non-commercial organisations and scientific research.
In addition to data acquisition, the area of infor-
mation visualisation is also relevant. Indoor maps
a
https://orcid.org/0000-0001-7313-3013
b
https://orcid.org/0000-0003-4998-6774
c
https://orcid.org/0000-0002-9738-042X
d
https://orcid.org/0000-0003-1861-6033
e
https://orcid.org/0000-0002-0729-6030
are a typical form of visualisation for indoor geo-
data and can be displayed in 2-D or 3-D depend-
ing on the application. ”Indoor visualisation differs
from outdoor visualisation in the necessity of rep-
resenting different floors in the same geographical
space. Therefore, some concepts of outdoor visual-
ization can be extrapolated to indoor visualisation,
while others must be reconsidered.” - (Amat et al.,
2014). A computer-generated visualisation is typi-
cally based on a renderer. This is a programme that
converts data, in this case geodata, into pixels based
on defined rules.
A general hurdle in software development, how-
ever, is the cross-platform development of pro-
grammes that can run on different devices such as
smart phones or desktop computers with different ar-
chitectures and platforms.
For a few years now, there has been another at-
tempt to solve this problem and to realise cross-
platform applications with the Flutter Software De-
velopment Kit (SDK) initiated by Google (Google,
2020). However, there is currently no library for
Flutter that can render OpenStreetMap indoor
data. Still, there already exists the open-source li-
brary Mapsforge Flutter (Schwartz, 2020) that can
render outdoor maps. So far, developers who want
Richter, J., Thomas, R., Lange, D., Graichen, T. and Heinkel, U.
Development of a Platform-independent Renderer for the Rendering of OpenStreetMap Indoor Maps in Flutter.
DOI: 10.5220/0010781500003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 1: GRAPP, pages
147-154
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
147

to use indoor maps in their application have to imple-
ment their indoor rendering themselves.
Therefore, our aim in the presented work, is the
extension of Mapsforge Flutter with 2-D indoor
rendering. Special focus was placed on the seam-
less integration of the indoor maps into already ex-
isting outdoor maps or the outdoor rendering. The
indoor rendering was also kept customisable through
the existing themes in Mapsforge. A prototype was
developed in Flutter to demonstrate the functionality
of the indoor renderer. In this prototype, the user is
able to explore outdoor areas as well as different lev-
els of indoor areas in selected maps. At the same
time, the prototype was compiled and tested on vari-
ous end devices and platforms to prove its platform
independence and to measure performance. The ex-
tension of the open source library Mapsforge Flutter
will also allow other developers to re-use the code.
The paper is structured as follows: Section 2 con-
templates extant works. This is followed by Section 3
where our indoor rendering process, the resulting pro-
totype as well as used concepts, data structures and
libraries are explained in detail. Section 4 presents
and discusses results concerning performance, plat-
form independence and the rendering output. The last
chapter summarises the work, points out limitations
and provides an outlook for future work.
2 RELATED WORK
Indoor rendering of OSM data is still an under-
researched topic in the academic literature. Many
works mainly address the problem of indoor locali-
sation with the rendering of indoor maps often play-
ing only a subordinate role. The work by Amat et al.
uses OSM data to develop an Android app with voice
control for indoor positioning, navigation and infor-
mation retrieval in smart cities (Amat et al., 2014).
The building data is mapped using the now obso-
lete IndoorOSM scheme (OpenStreetMap Contribu-
tors, 2020a) and is later converted into the GeoJSON
format for better processing. The outdoor rendering
is implemented using the Mapsforge library (Maps-
forge Contributors, 2020a), while the indoor render-
ing was implemented separately and is then displayed
above the map in an overlay. This does not guarantee
a seamless integration of indoor and outdoor maps,
because text of an outdoor map might be cut off.
Moreover, the original Mapsforge uses Java, which
per se allows only desktop and Android applications
and therefore is not platform-independent.
A work by Graichen et al. also uses the In-
doorOSM scheme and the Mapsforge library to cre-
Figure 1: Example of a map where text of outdoor map is
cut off due to the overlay.
ate a map view that renders indoor as an overlay over
outdoor map data, which is also not seamless so that
text gets cut off, see Figure 1, (Graichen, 2014). For
this, the authors wrote an own extension for indoor
rendering. However, this code is not open source.
Their implementation of level selection is based on
the zoom level and displayed depending on whether
a building with indoor data is visible in the viewport.
Then the level selection bar is dynamically fading in
and out. Further work by Graichen et al. builds up
on this work and extends it with new indoor tagging
approaches (Graichen et al., 2017b) or indoor posi-
tioning and navigation (Graichen et al., 2017a).
In addition to academic work, there is also a
variety of community projects, that have taken up
the topic in the form of web apps without focusing
on cross-platform development aspects. Open-
LevelUp! accesses the OSM indoor data directly
using the Overpass API and then renders them over
the standard OSM pixel tiles (Pavie, 2020). The in-
door maps are additionally highlighted by fading the
outer areas with increasing zoom level. The selection
of the levels is done as in previous works via a bar
which contains all visible buildings. A special feature
also allows the selection of non-integer levels. In-
doorequal uses Mapbox vector tiles and Mapbox-GL
(Mapbox, 2020) for map rendering (indoor=, 2020).
Since the standard Mapbox tiles do not contain
indoor data, a separate set of indoor vector tiles is
created beforehand. Later, these can be reloaded
and rendered on a layer above using Mapbox-GL.
The level selection consists of separate buttons and,
similar to OpenLevelUp! also displays non-integer
levels. In contrast to other applications, Openindoor
also renders buildings with 3-D information and
hides the outdoor map completely when entering the
indoor visualisation (openindoor, 2020).
GRAPP 2022 - 17th International Conference on Computer Graphics Theory and Applications
148

Commercial map services such as Google Maps
also offer indoor maps of shopping centres, airports or
stadiums (Google, 2021). For general map rendering,
vector tiles are preferably used. Pixel tiles only serve
as a fallback, e. g. because the browser does not fulfil
certain requirements. However, due to the proprietary
code, details about the rendering are not available. Al-
though Google Maps does not work with OSM data, it
is at least worth taking a brief look at their interaction
design. In contrast to other applications, the indoor
maps and level bar are not displayed automatically.
Instead, the building must be selected e. g. by a click
or a search query. The level display preferably shows
the exact level designation of the respective building
instead of a sequence of numbers. There are many
other companies that focus on indoor mapping, loa-
cation and navigation (MazeMap, 2020), (esri, 2020),
(Favendo, 2019), (mapwize, 2020). None of these
companies, however, allow an insight into their ren-
dering processes, because they are not open source.
Similarly the few provided demos do not offer novel
design techniques that might be of interest for later
prototypical implementation. Consequently, commer-
cial solutions do not offer free libraries that can be
re-used for the development of new map services.
3 METHODS
Figure 2: Overview: From OSM indoor data to rendered
maps (pixel tiles).
Figure 2 demonstrates the rendering process in which
we integrated indoor rendering. Starting from OSM
map sections, OSM indoor elements are filtered out
by means of the so-called tag-mapping file, trans-
ferred and stored as vector tiles in a so-called map file.
Thereupon, the selected indoor elements are rendered
by using a defined render theme, resulting in a map
visualisation based on pixels, so-called pixel tiles. In
the following sections, every component of this figure
is presented in more detail. We contributed to the ad-
vance of indoor rendering by realising the following
aspects, which will be explained in detail in the subse-
quent sections as well and highlighted with numbers
(1) to (4) in the next sections:
(1) Transfer of required indoor data with level or re-
peat on tag into Mapsforge vector tiles
(2) Render theme extension with render rules for in-
door elements
(3) Extension of the rendering library with an addi-
tional match check to an indoor level variable
(4) Extension of the tile identification by an indoor
level value for retrieval from the cache
3.1 OpenStreetMap Data Structure
OSM data is commonly represented in the widespread
eXtensible Markup Language (XML) and comprises
the basic elements node, way, relation and associated
tags. A node defines a point on the earth by the ge-
ographical coordinates longitude and latitude. A way
or path contains an ordered sequence of references to
nodes and can be understood as a polygon course. For
a way to describe an area the first and the last node
must be identical. The relation tag can be used to de-
scribe a relationship between two or more elements
The tag element may be used within node, way or re-
lation elements and is necessary to assign additional
meanings to them.
For mapping the interior of buildings, the Simple
Indoor Tagging scheme (SIT) (OpenStreetMap Con-
tributors, 2020c) was developed and is now the estab-
lished standard for OSM indoor mapping.
3.2 Simple Indoor Tagging
Figure 3 shows a schematic representation of all in-
door elements. SIT is based on the OSM elements de-
scribed in the previous section. For example, closed
ways or areas are used for the representation of
rooms. These elements are then described and clas-
sified in more detail using additional tags (Graichen,
2018). With the indoor key, surfaces can first be as-
signed to one of the following four indoor elements:
room, area, wall or corridor. Further details such as
room name or room number can be added with the
keys name and ref. All indoor elements can addition-
ally be connected with doors. A door is a single node
that is shared by both rooms or a way adjacent to both
rooms and is described by the key door. To define
over which levels a room or point of interest (POI)
extends, the level key is used. By means of this key,
an elevator extending from the ground level to the top
level of a building, can be mapped for example. In
the special case where geometrically identical indoor
elements can be found repetitively on multiple levels
they may only be defined once supplemented by the
repeat
on key.
To create a map data visualisation from this data,
so-called ”renderers” are programmed, which process
the data and convert it into a visual representation.
Development of a Platform-independent Renderer for the Rendering of OpenStreetMap Indoor Maps in Flutter
149
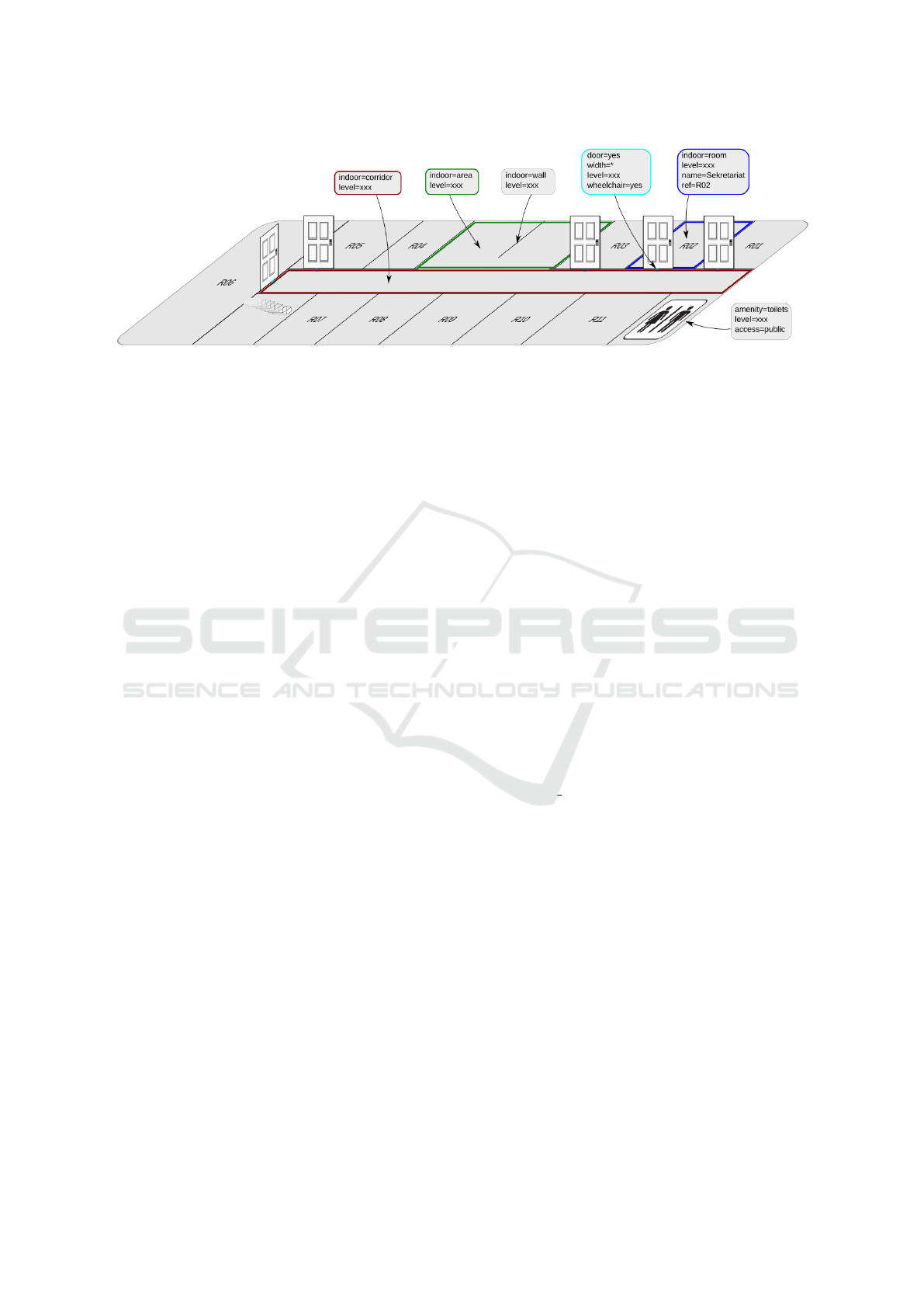
Figure 3: Illustration of the four basic indoor elements in OSM. Graphic taken from OSM Wiki (OpenStreetMap Contributors,
2020c).
3.3 Rendering
In most cases, maps are not rendered as a single con-
tinuous image, but as individual tiles, often called
pixel tiles. A tile represents a square map section of
e. g. 256 x 256 pixels and is uniquely described by
its position and its zoom level. These tiles are later
reassembled into a map in a second much more parsi-
monious rendering process to create a map.
However, map services such as Google Maps or
Mapbox have recently started to use so-called vector
tiles instead of pixel tiles. These are also map sec-
tions, but in the form of geometric data such as paths,
shapes and points with additional information such as
labels or symbols.
The advantages of vector tiles over pixel tiles
are as follows: They require less memory, allow the
map to be rendered in a custom defined style, are reso-
lution independent, and allow intermediate zooming.
However, both vector and pixel tiles are depen-
dent on a tile server and therefore on an internet con-
nection. As an alternative approach offline maps can
be used, which store and serve vector tiles directly
from the device. Various libraries already exist for
the integration of offline maps into own apps (Open-
StreetMap Contributors, 2020d). These include open
source libraries such as MapboxGL and Mapsforge.
Since no uniform vector tile or offline map format ex-
ists, the use of a library also leads to a binding to the
respective tile format. Although MapboxGL is open
source, there is a charge for providing the tiles for
larger projects. Thus the Mapsforge library currently
offers the best completely free solution.
3.4 Mapsforge
Mapsforge is a library programmed in Java for the
simple integration and display of OSM offline maps.
With Osmosis, a tool for processing OSM data (Open-
StreetMap Contributors, 2020b), and the Mapsforge
Writer plugin (Mapsforge Contributors, 2020b), the
data can be converted into the Mapsforge file struc-
ture, i. e. the map file. The Mapsforge-Writer re-
solves all references and relations to concrete values
and elements, so that POIs and Ways are stored di-
rectly with their associated coordinates and tags. Fur-
thermore, the data is grouped into zoom intervals.
This allows a more efficient rendering later on as ob-
jects that are not visible are already pre-filtered. Ad-
ditionally, map files require much less memory than
OSM files (factor approximately 50), which is an ad-
vantage in terms of downloading and an efficient ac-
cess of data.
Additionally many OSM tags, which are not
needed for the map visualisation, are filtered out when
creating the map file. The tags to be transferred are
stored in the tag-mapping.xml file. This allows the
customisation of tags that are finally written into the
POI and way data block. (1) At this point, we have ad-
justed the creation of the map file to additionally en-
able the transfer of indoor data that contains the level
or the repeat on tag to this very file. We moreover had
to specify indoor-relevant tags to be transferred such
as room, area, wall, corridor, entrance, door, stair.
This map data contains coordinates and tag infor-
mation, but no data about how the elements should be
displayed later. This information is defined separately
in a render theme.
As mentioned previously, most vector tile render-
ers offer the possibility to define the map appearance
by means of render themes. Mapsforge offers its
own XML-based style sheet format. In contrast to
OSM files, a fixed XML schema exists here that can
be used to validate each theme. To determine how a
way or node element is displayed, it must first be se-
lected. For this there are so called rules in Mapsforge.
These rules determine which properties an element
must meet, so that it is selected. They are defined by
the rule element, which also allows nesting, in which
case several rules must apply. All criteria by which an
GRAPP 2022 - 17th International Conference on Computer Graphics Theory and Applications
150

element can be selected are defined as attributes in the
rule elements. The e-attribute allows the three values
node, way or any and defines which element should
be selected. The k and v attributes define which tag
key and tag value the element must have for the rule
to apply. After the rule-based selection of the map
elements, they must now be rendered with the appro-
priate render commands. Render commands consist,
similar to scaleable vector graphics (SVG) elements,
of an element name (the render- command) and a list
of attributes such as colour, line thickness or font. (2)
In the presented work, we extended the render theme
by defining colour codes for building elements and
by creating icons for POIs such as toilets, shops and
restaurants as can be seen in the figures in Section 4.3.
The renderer is the program component that pro-
cesses vector tiles into pixel tiles based on a render
theme. The Mapsforge map visualisation is initially
divided into two separate layers: The tile layer, where
the pixel tiles are merged, and the so called label layer,
where symbols and labels are rendered and which is
rendered on top of the pixel layer. On the one hand,
this makes it possible to render text elements that pro-
trude beyond tile boundaries without them being cut
off. On the other hand, it further allows an efficient
map rotation without having to rotate the labels and
symbols or re-render the tiles each time. In addition,
this division allows the implementation of a place-
ment algorithm for labels and symbols. Since the ren-
dering of vector tiles to pixel tiles is a computation-
ally intensive process, pixel tiles are stored in a cache
once they have been generated. For each tile to be ren-
dered, the elements it contains are checked against the
tags defined in the render theme: Only the tags con-
tained in the theme are rendered. (3) Since the vector
tiles contain indoor elements for multiple floors, ele-
ments that do not match the currently selected indoor
level must be filtered by their respective level or re-
peat on tag. In this way, only the floor selected by
the user is rendered and then written to the cache for
faster reuse. (4) To enable access to tiles represent-
ing different floors in a building, we extended the tile
cache by a level component.
As mentioned earlier, Mapsforge is written in
Java. Although Java is available on many platforms,
it is not available for iOS or web app development
by default. This lack of platform independence is
compensated by other libraries such as Mapbox with
platform-specific SDKs (Mapbox, 2020), which must
be developed separately for each platform. An alter-
native solution is provided by the Flutter SDK, which
allows to compile apps with the same code base for
different platforms (Google, 2020).
3.5 Flutter
Flutter is an open source SDK from Google for
the development of cross- platform applications us-
ing the object-oriented programming language Dart.
Flutter uses its own rendering engine to create cus-
tom widgets. Flutter widgets are modular and devel-
oped directly in Dart. This allows them to be ex-
tended or even to be edited and thus offer signifi-
cantly fewer limitations than native widgets. This and
the existence of an early Mapsforge port for Flutter
(Schwartz, 2020) is why Flutter was used as the de-
velopment toolkit in our work. The present work
built on this foundation with the goal of integrating
indoor rendering into Mapsforge Flutter in order to
develop cross-platform indoor map apps. The devel-
oped prototype integrates the described indoor exten-
sions in Mapsforge Flutter and demonstrates the ren-
dering of example OSM indoor maps, which is shown
in the next section.
4 RESULTS AND DISCUSSION
The code for rendering indoor maps is publicly avail-
able at (Schwartz, 2020).
4.1 Evaluation Setup
The app is tested on a total of four different platforms:
Android, iOS, Windows, and Linux. Table 1 shows
the more detailed specifications of the individual ter-
minal devices.
4.2 Performance Analysis and Platform
Independence
Since all tiles are rendered one after the other, the
time required for this is measured per tile. This has
the advantage that the tile size is always the same and
therefore independent of the screen/viewport of the
respective platform. It should be noted that the ren-
dering performance depends on many factors, such as
the theme, the used map or the displayed map section.
The performance is tested on the four zoom levels 14,
16, 18 and 20 for one example map. A higher zoom
level means having zoomed further into the map, i. e.
being closer to the ground. The average values mea-
sured for each platform and zoom level are shown in
from Figure 5.
The first result to notice is that the rendering time
increases significantly at a lower zoom level, i. e.
when you have zoomed out. This is due to the fact
Development of a Platform-independent Renderer for the Rendering of OpenStreetMap Indoor Maps in Flutter
151

Table 1: Terminal devices and platform specifications for cross-platform and performance evaluation.
Device Desktop computer
Fairphone 3
(GSMArena, 2021b)
iPhone 6
(GSMArena, 2021a)
OS Windows 10
Linux 5.4.101-1;
Wayland - GNOME -
Manjaro
Android 10
Kernel 4.9.218
iOS 12.5.1
CPU
Intel(R) Core(TM) i7-7700K
CPU @ 4.20 GHz
Octa-core
(4x1.8 GHz Kryo 250 Gold &
4x1.8 Ghz Kryo 250 Silver)
Dual-core 1.4 GHz Typhoon
(ARM v8-based)
GPU AMD Radeon RX 590 Adreno 506
PowerVR GX6450
(quad-core graphics)
that at lower zoom levels significantly more elements
per tile have to be rendered than at higher zoom lev-
els. In a comparison of the individual systems, the
desktop applications perform better with a maximum
average render time of 120 ms per tile. However, it
should be noted that desktops usually have a larger
viewport than mobile devices and have to render more
tiles than mobile devices.
With regard to cross-platform development with
Flutter, the tests showed an all-round positive picture.
The app was executable on all tested systems with-
out any particular changes, even though the desktop
builds are still in the early stages. Only for the mo-
bile platforms some app permissions had to be added
to the code. It has also been confirmed that Flutter
automatically adapts the app with regard to platform-
specific functions and design patterns, such as the
swipe back on iOS or the presentation of icons such
as the ”More Options Button”.
4.3 Rendering Output
Figure 4 presents the rendering output for a variety of
open and freely available OSM indoor maps. This fig-
ure demonstrates that the aim of this work, defined in
Section 1, could be reached: We extended the Maps-
forge Flutter with a 2-D indoor rendering that allows
the seamless integration of indoor into outdoor maps
without cutting off text. Moreover, the user is now
able to select the different floors of a building. By
means of the implemented features, indoor rendering
is now freely available for usage in cross-platform
research, community and commercial projects.
5 CONCLUSIONS, LIMITATIONS
AND FUTURE WORK
So far, all the applications and works presented that
have dealt with the rendering of OSM indoor data ren-
der the indoor visualisation separately over the out-
door visualisation. The disadvantages associated with
this are the overlapping of text and icon elements or
an increased caching effort. In this work, indoor el-
ements are not considered separately from outdoor
elements. They are only subject to the indoor level
parameter and receive a higher weighting by being
rendered in the theme over outdoor elements such as
buildings and streets. Icons or lettering can thus gen-
erally be rendered last and are therefore not occluded
by indoor elements. Regardless of whether they orig-
inate from outdoor or indoor elements, they are al-
ways subject to the same layout algorithm, which en-
ables consistent distribution and presentation. As a
consequence, this work solves a fundamental prob-
lem of previous indoor rendering approaches. A fi-
nal application with core requirements such as flexi-
ble level selection or automatic recognition of the cur-
rently available levels was developed in Flutter as a
proof of concept, showing various building scenarios.
Moreover, by testing the application on different end
devices, the platform independence could be proven.
The Mapsforge port to Flutter is currently still at
an early stage, which is why a number of errors were
discovered in the course of the work that also affect
the indoor rendering. These include, for example, la-
bels or symbols being cut off or not visible. The rea-
son for this is that they are currently still rendered di-
rectly into the tiles, causing them to be cut off when-
ever they extend beyond the tile boundaries. Another
limitation arises from the use of Flutter: it does cur-
rently not allow rendering in a separate thread or iso-
late (Flutter, 2021). As a result, parallel rendering of
multiple tiles is not possible and the rendering process
can block the UI thread. Therefore, the flutter engine
cannot reliably update the UI at 60 frames per second
during interactions with the application, which can be
noticeable to the user as stuttering (so-called jank) or,
in the worst case, as a brief freeze of the application.
Further work could therefore look at developing
a hardware accelerated renderer for Mapsforge Flut-
ter. This could outsource the entire map rendering to
the graphics card using OpenGL or Vulkan. In ad-
GRAPP 2022 - 17th International Conference on Computer Graphics Theory and Applications
152

(a)
(b)
(c)
(d) (e) (f)
(g)
Figure 4: Rendering output for example buildings. 4a: Seamless integration of library map data at Chemnitz University of
Technology into outdoor map. 4b: Library map section at lower zoom level. 4c: A level selection bar at the bottom right of
the display allows user to view different floors of the building. 4d - 4g: Further examples of generated indoor maps.
Figure 5: Performance analysis: Average render duration
for an example building at Chemnitz University of Tech-
nology.
dition to accelerated rendering, this could solve UI
thread blocking and result in other benefits such as re-
duced caching overhead. Other topics relevant to in-
door maps are the elaboration and extension of OSM
schemas such as doors and windows and, if neces-
sary, the development of suitable Mapsforge render
commands. The determination of the building asso-
ciations of indoor data has also not been conclusively
clarified. This is especially true for indoor elements
that extend beyond the outline of the building or lie
completely outside it. In this context, it is also worth-
while to examine alternative forms of representation
for underground indoor maps in more detail. Cur-
rently, these are displayed seamlessly above the out-
door map, which means that an underground station
can be located above roads or other buildings. How-
ever, this representation may be confusing because it
contradicts real spatial relations.
It is likely that Flutter will become an increas-
ingly popular and relevant tool for creating cross-
platform applications in the future. With the exten-
sion of Mapsforge Flutter, this work provides a flexi-
ble renderer for OSM indoor data that can be used in
a variety of different indoor-related applications.
ACKNOWLEDGEMENTS
This project is funded by the European Social Fund
(ESF) with the project ID 100382183.
Development of a Platform-independent Renderer for the Rendering of OpenStreetMap Indoor Maps in Flutter
153

REFERENCES
Amat, G., Fernandez, J., Arranz, A., and Ramos, A. (2014).
Using open street maps data and tools for indoor map-
ping in a smart city scenario.
CARTO (2021). Indoor Mapping & Analytics —
CARTO. https://carto.com/solutions/indoor-mapping
/, visited 2021-03-15.
esri (2020). Indoor Navigation Map & App Making
| Build Custom Indoor Mapping Applications.
https://www.esri.com/en-us/arcgis/products/arcgis-i
ndoors/capabilities/indoor-map-app-making, visited
2021-03-15.
Favendo (2019). Indoor maps & mapping software for pro-
fessional needs. https://www.favendo.com/indoor-m
aps, visited 2021-03-15.
Flutter (2021). Unable to call a platform channel method
from another isolate · Issue #13937 · flutter/flutter.
https://github.com/flutter/flutter/issues/13937, visited
2021-03-15.
Google (2020). Flutter - Beautiful native apps in record
time. https://flutter.dev/, visited 2021-03-15.
Google (2021). Google Maps - Indoor-Karten. https://www.
google.com/intl/de/maps/about/partners/indoormaps,
visited 2012-03-26.
Graichen, T. (2014). A Combined In- and Outdoor Map for
Android. https://www.youtube.com/watch?v=65hY4a
9ObZI, visited 2021-03-15.
Graichen, T. (2018). Simple Indoor Tagging - An Indoor
Mapping Approach for OSM.
Graichen, T., Gruschka, E., and Heinkel, U. (2017a). A
map framework using crowd-sourced data for indoor
positioning and navigation. In 2017 IEEE Interna-
tional Workshop on Measurement and Networking (M
N), pages 1–6.
Graichen, T., Quinger, S., Heinkel, U., and Strassenburg-
Kleciak, M. (2017b). A Novel, User-Friendly Indoor
Mapping Approach for OpenStreetMap.
GSMArena (2021a). Apple iPhone 6 - Full phone spec-
ifications. https://www.gsmarena.com/apple iphone
6-6378.php, visited 2021-03-15.
GSMArena (2021b). Fairphone 3 - Full phone specifica-
tions. https://www.gsmarena.com/fairphone 3-10397.
php, visited 2021-03-15.
Here (2021). Indoor Mapping Solutions | HERE.
https://www.here.com/platform/tracking-positio
ning-solutions/indoor-mapping-solutions, visited
2021-03-15.
indoor= (2020). indoorequal.org. https://github.com/ind
oorequal/indoorequal, visited 2021-03-15. Program-
mers: :n309 original-date: 2019-12-23T11:58:55Z.
Mapbox (2020). Mapbox Documentation. https://www.ma
pbox.com/, visited 2021-03-15.
Mapsforge Contributors (2020a). Mapsforge. https:
//github.com/mapsforge/mapsforge, visited 2021-03-
15. Programmers: :n229 original-date: 2014-11-
06T09:13:20Z.
Mapsforge Contributors (2020b). Mapsforge - Map-
Writer. https://github.com/mapsforge/mapsforge/blo
b/master/docs/Getting-Started-Map-Writer.md, vis-
ited 2021-03-15.
mapwize (2020). Indoor mapping & Wayfinding for Smart
Buildings. https://www.mapwize.io/, visited 2021-03-
15.
MazeMap (2020). Indoor Maps. https://www.mazemap.co
m/indoor-maps, visited 2021-03-15.
openindoor (2020). OpenIndoor – for indoor maps. https:
//www.openindoor.io/, visited 2021-03-15.
OpenStreetMap Contributors (2020a). IndoorOSM - Open-
StreetMap Wiki. https://wiki.openstreetmap.org/wiki/
Proposed features/IndoorOSM, visited 2021-03-15.
OpenStreetMap Contributors (2020b). Osmosis - Open-
StreetMap Wiki. https://wiki.openstreetmap.org/wik
i/Osmosis, visited 2021-03-15.
OpenStreetMap Contributors (2020c). Simple Indoor Tag-
ging - OpenStreetMap Wiki. https://wiki.openstreetm
ap.org/wiki/Simple Indoor Tagging, visited 2021-03-
15.
OpenStreetMap Contributors (2020d). Using Open-
StreetMap offline - OpenStreetMap Wiki.
https://wiki.openstreetmap.org/wiki/Using Open
StreetMap offline, visited 2021-03-15.
OpenStreetMap Contributors (2021a). Indoor/use cases -
OpenStreetMap Wiki. https://wiki.openstreetmap.org
/wiki/Indoor/use cases, visited 2021-03-16.
OpenStreetMap Contributors (2021b). OpenStreetMap. ht
tps://www.openstreetmap.org/, visited 2021-03-15.
Pavie, A. (2020). OpenLevelUp! https://openlevelup.net,
visited 2021-03-15.
Schwartz, M. (2020). GitHub -
mikes222/mapsforge flutter: A port of maps-
forge for flutter. https://github.com/mikes222/mapsfo
rge flutter, visited 2021-03-15.
GRAPP 2022 - 17th International Conference on Computer Graphics Theory and Applications
154
