
3D Detection of Vehicles from 2D Images in Traffic Surveillance
M. H. Zwemer
1,2 a
, D. Scholte
1,2
, R. G. J. Wijnhoven
2 b
and P. H. N. de With
1 c
1
Department of Electrical Engineering, Eindhoven University, Eindhoven, The Netherlands
2
ViNotion BV, Eindhoven, The Netherlands
Keywords:
3D Object Detection, Traffic Surveillance, Vehicle Detection.
Abstract:
Traffic surveillance systems use monocular cameras and automatic visual algorithms to locate and observe
traffic movement. Object detection results in 2D object boxes around vehicles, which relate to inaccurate
real-world locations. In this paper, we employ the existing KM3D CNN-based 3D detection model, which
directly estimates 3D boxes around vehicles in the camera image. However, the KM3D model has only been
applied earlier in autonomous driving use cases with different camera viewpoints. However, 3D annotation
datasets are not available for traffic surveillance, requiring the construction of a new dataset for training the 3D
detector. We propose and validate four different annotation configurations that generate 3D box annotations
using only camera calibration, scene information (static vanishing points) and existing 2D annotations. Our
novel Simple box method does not require segmentation of vehicles and provides a more simple 3D box
construction, which assumes a fixed predefined vehicle width. The Simple box pipeline provides the best 3D
object detection results, resulting in 51.9% AP3D using KM3D trained on this data. The 3D object detector
can estimate an accurate 3D box up to a distance of 125 meters from the camera, with a median middle point
mean error of only 0.5-1.0 meter.
1 INTRODUCTION
Vehicle traffic congestion is a major problem world-
wide. Traffic surveillance systems can help to im-
prove traffic management in the city and ensure road
and traffic safety. Such traffic surveillance systems
commonly use networks of monocular cameras and
employ computer vision algorithms to observe traf-
fic movement. These camera systems employ object
detection and tracking to collect statistics such as the
number of vehicles per traffic lane, the type of vehi-
cles and the traffic flow.
Typical traffic analysis systems for surveillance
cameras use an object detector to localize vehicles
followed by a tracking algorithm to follow vehicles
over time. Object locations in computer vision are
typically represented by a 2D box fully capturing the
object. The bottom midpoint of the box is then used
to define the vehicle position in a single location (see
Figure 1). The ground surface of the object is thereby
represented in a single point only. Using the camera
calibration, this pixel-position point can be converted
a
https://orcid.org/0000-0003-0835-202X
b
https://orcid.org/0000-0001-8837-3976
c
https://orcid.org/0000-0002-7639-7716
Figure 1: Localization using 2D and 3D bounding boxes.
Note the difference between the estimated ground-plane lo-
cation (red dot) for both bounding boxes.
to a real-world (GPS) location for further use in the
traffic application. A more accurate detection method
would represent the object location by a 3D bounding
box such that the complete ground plane is estimated
in contrast to the current single point. The use of more
accurate 3D location estimation enables more accu-
rate measurements of vehicle speed, size and inter-
vehicle distances.
In this paper, we propose to use a 3D bounding-
box detector on monocular fixed-camera images. We
assume that the cameras are fully calibrated such
that the camera locations can be converted to 3D-
world positions. Detectors that directly estimate
3D boxes (Li, 2020) from 2D images, require 3D-
labeled training datasets, which are not available
for our traffic surveillance application. Available
traffic surveillance datasets lack camera calibrations
Zwemer, M., Scholte, D., Wijnhoven, R. and de With, P.
3D Detection of Vehicles from 2D Images in Traffic Surveillance.
DOI: 10.5220/0010783600003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
97-106
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
97

and 3D box annotations. Such 3D annotations are
available in datasets for autonomous driving such
as KITTI (Geiger et al., 2012), but the in-car cam-
era viewpoints are different from typical road-side
surveillance viewpoints. We propose a novel anno-
tation processing chain that converts existing 2D box
labels to 3D boxes using labeled scene information.
This labeled scene information is derived from 3D
geometry aspects of the scene, such as the vanishing
points per region and the estimated vanishing points
per vehicle depending on the vehicle orientation. The
use of vanishing points combined with camera cali-
bration parameters enables to derive 3D boxes captur-
ing the car geometry in a realistic setting. For validat-
ing the concept, the existing KM3D (Li, 2020) CNN
object detector is evaluated on our automatically an-
notated traffic surveillance dataset to investigate the
effect of different processing configurations, in order
to optimize the system into a final pipeline.
The remainder of this paper is structured as fol-
lows. First, a literature overview is given in Section 2.
Second, the 3D box annotation processing chain is
elaborated in Section 3. The results of the experi-
ments are presented in Section 4 where also the op-
timal pipeline is determined. Section 5 discusses the
conclusions.
2 RELATED WORK
There are two categories of 3D object detectors for
monocular camera images: (A) employing geometric
constraints and labeled scene information and (B) di-
rect estimation of the 3D box from a single 2D image.
A. Geometric Methods. In (Dubsk
´
a et al., 2014),
the authors propose an automatic camera calibration
from vehicles in video. This calibration and vanishing
points are then used to convert vehicle masks obtained
by background modeling to 3D boxes. They assume
a single set of vanishing points per scene, as the road
surface in the scenes are straight and the camera posi-
tion is stationary. The authors of (Sochor et al., 2018)
improve vehicle classification using information from
3D boxes. Because their method works on static 2D
images and motion information is absent to estimate
the object orientation, they propose a CNN to esti-
mate the orientation of the vehicle. With the vehicle
orientation and camera calibration the 3D box is esti-
mated based on work of (Dubsk
´
a et al., 2014). In our
case, we adopt the 3D box generation from Dubsk
´
a et
al., but instead of using the single road direction (per
scene) for each vehicle, we calculate the orientation
for each vehicle independently. This enables to ex-
tend the single-road case to scenes with multiple vehi-
cle orientations, such as road crossings, roundabouts
and curved roads.
B. Direct Estimation by Object Detection. Early
work uses a generic 3D vehicle model that is pro-
jected to 2D given the vehicle orientation and cam-
era calibration and then matched to the image. The
authors of (Sullivan et al., 1997) use an 3D wire-
frame model (mesh) and match it on detected edges in
the image and Nilsson and Arn
¨
o (Nilsson and Ard
¨
o,
2014) use foreground/background segmentation. Ve-
hicle matching is sensitive to the estimated vehicle
position, the scale/size of the model, and the vehicle
type (stationwagon vs. hatchback). Histogram of Ori-
ented Gradients (HOG) (Dalal and Triggs, 2005) gen-
eralizes the viewpoint specific wire-frame model to a
single detection model. Wijnhoven et al. (Wijnhoven
and de With, 2011) divide this single detection model
into separate viewpoint-dependent models.
State-of-the-art CNN detectors generalize into a
multi-layer detection system. Here, the vehicle and
its 3D pose are estimated directly from the 2D im-
age. Most methods use two separate CNNs or ad-
ditional layers. Depth information is used as an ad-
ditional input to segment the vehicles in the 2D im-
age in (Brazil and Liu, 2019; Ding et al., 2020; Chen
et al., 2016; Cai et al., 2020). Although the depth
is estimated from the same 2D images, it requires an
additional depth-generation algorithm. Mousavian et
al. (Mousavian et al., 2017) use an existing 2D CNN
detector and add a second CNN to estimate the ob-
ject orientation and dimensions. The 3D box is then
estimated as the best fit in the 2D box, given the ori-
entation and dimensions. RTM3D (Li et al., 2020)
and KM3D (Li, 2020) estimate 3D boxes from the 2D
image directly into a single CNN. They utilize Cen-
terNet with a stacked hourglass architecture to find
8 key points and the object center, to define the 3D
box. Whereas RTM3D utilizes the 2D/3D geometric
relationship to recover the dimension, location, and
orientation in 3D space, KM3D estimates these values
directly, which is faster and can be jointly optimized.
We adopt the KM3D model as the 3D box detector
because it is fast and can be trained end-to-end on 2D
images only.
3 SEMI-AUTOMATIC 3D
DATASET GENERATION
This section presents several techniques to semi-
automatically estimate 3D boxes from scene knowl-
edge and existing 2D annotated datasets for traffic
surveillance. Estimating a 3D box in an image is car-
ried out in the following four steps (see Figure 2).
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
98

Dataset
2D
Generation of
3D Dataset
Dataset
2D & 3D
3D Object
Detector
Training
Camera Images
3D Object
Detection
Live Operation:
3D Object
Detection
3D Object
Detector
Scene Information
&
Camera Calibration
2D Localization
&
Segmentation
Orientation
Estimation
3D Box
Generation
Offline training and evalua�on:
Evaluation
3D Detec�on
Results
Figure 2: System overview of automatic 3D annotation of 2D images and training the 3D object detector, using inference with
live camera images.
First, a camera calibration and scene information is
created for each camera scene. Second, the 2D loca-
tion and segmentation for each vehicle is determined.
Third, the orientation of each vehicle is estimated, and
finally the 3D box is constructed. Each step is now
explained individually.
A. Prior Knowledge. The first step is to gather scene
information from an image set and create a corre-
sponding camera calibration. Since datasets often
contain many images from the same scene, this prior
knowledge has to be generated often only once for
each unique scene, resulting in limited manual effort.
The camera calibration involves estimation of all
internal and external camera parameters to form a
camera projection matrix (Brouwers et al., 2016).
This matrix describes the mapping of a pinhole cam-
era model from 3D points in the world to 2D image
coordinates and vice versa.
The scene information consists of annotated van-
ishing points for each straight road section. The yel-
low lines in the example of Figure 3a show the lines
from each straight road section (blue area), which will
converge to the corresponding vanishing point (out-
side the image). The vanishing points are used in our
orientation estimation and 3D box-generation steps.
(a) Annotated scene. (b) Segmentation map.
Figure 3: Example scene with configured horizon lines and
2D annotated bounding-boxes (a). Blue areas show the
straight road segments, yellow lines are used to find the
vanishing points (partially blurred for privacy reasons). The
image in (b) shows the corresponding segmentation map of
the scene.
B. Segmentation and 2D Box Locations. Object
segmentation for each vehicle is required for some
of the techniques for orientation estimation and 3D
box-generation steps. Although any algorithm that
produces a segmentation mask can be used, we em-
ploy the existing Mask-RCNN object detector with
instance segmentation (He et al., 2017) for its effi-
ciency. Figure 3b show an example segmentation
map. The 2D box detections are matched with the
2D box annotations based on an Jaccard overlap (IoU)
threshold. If sufficient overlap is found, the segmen-
tation is matched to our ground-truth annotation. If a
ground-truth object is not matched with a segmenta-
tion, it is removed from the training set. Detections
not matching ground-truth are ignored.
3.1 Orientation Estimation
In this subsection, the goal is to estimate the orienta-
tion of the object. The input is the scene information
(static vanishing points), camera calibration and the
2D box, while in some techniques also an object seg-
mentation is used. For each object, the output is an
orientation (angles) in the real-world domain.
The orientation estimation of all vehicles within
a straight road section is based upon the direction of
this straight section because we assume all vehicles
driving in the correct direction and orientation with
respect to these road sections. To this end, an overlap
is calculated between each 2D object bounding-box
and all the straight road sections (see blue areas in
Figure 3a). If the overlap value exceeds a threshold,
the orientation of the vehicle is parallel with the di-
rection of the considered road section (see Figure 4b).
If an object is not in a straight road section, we ap-
ply one of the techniques explained in the following
paragraphs. The techniques discussed are based on
Principal Component Analysis (PCA), PCA with ray
casting technique, and an Optical flow-based method.
A. Principal Component Analysis (PCA). PCA is
applied to the collection of foreground points in the
segmentation mask. The first principal component
corresponds to our orientation estimation which cor-
responds to the inertia axis of the segmentation mask.
Figure 4c illustrates an estimated orientation. If mul-
tiple sides of the vehicle are observed (e.g. front, top
and side of the vehicle in Figure 4c), the inertia axis of
the segmentation will be based on several sides of the
vehicle. This introduces an offset in the orientation
3D Detection of Vehicles from 2D Images in Traffic Surveillance
99
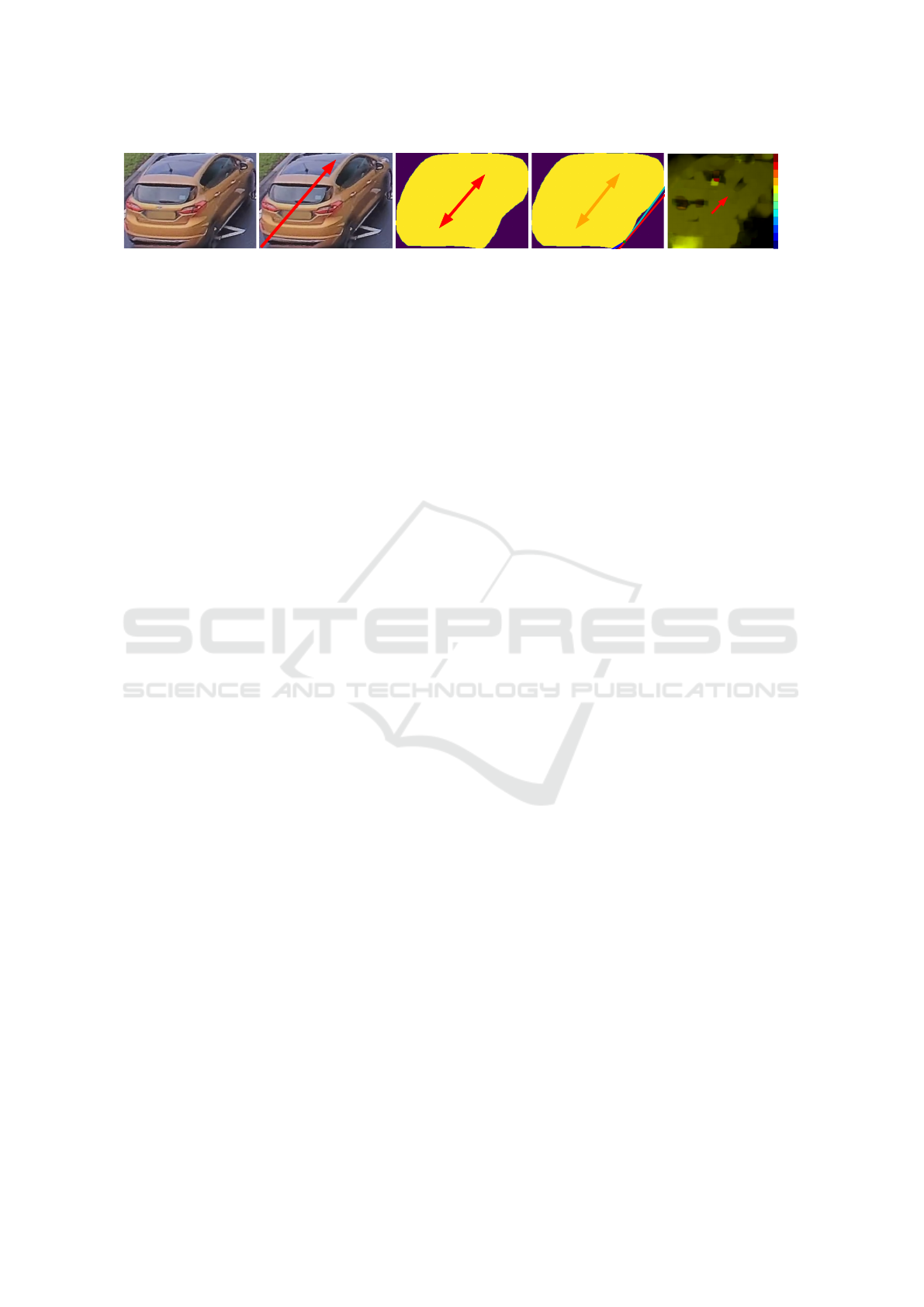
(a) Image crop. (b) Prior knowledge. (c) PCA. (d) Ray-Casting.
180
90
0
-90
-180
(e) Optical Flow.
Figure 4: Four methods (in (b)-(e)) of estimating orientation for the annotation shown in (a).
estimation. This offset depends on the orientation of
the vehicle, the tilt of the camera, and the location in
the image (e.g. far field).
B. PCA with Ray-casting. This method is similar
to the previous implementation using PCA analysis,
but extends this method by additional post-processing
using a ray-casting algorithm. This ray-casting algo-
rithm operates in the following two steps.
First, a line with the same orientation as the ori-
entation from the above PCA is fitted to the bottom
contour of the segmentation mask (when tilted right
(left), this is at the bottom-right (left) corner). This
line is shown by the red line in Figure 4d. The point
where this line intersects the segmentation contour is
the starting point of the ray-casting algorithm.
Second, a ray-casting algorithm is applied to de-
termine the edges of the contour as observed from the
intersection point (see the green dot in Figure 4d).
The ray-casting algorithm searches for a line from
the intersection point that intersects the segmenta-
tion contour at another point by evaluating multiple
lines with small orientation changes. These orienta-
tion changes are carried out in two directions, clock-
wise and counter-clockwise. The two lines resulting
from ray-casting are depicted in the bottom-right cor-
ner with dark blue and cyan lines in Figure 4d. The
orientation of the two resulting lines are compared to
the original estimated direction of the principal com-
ponents. If any of these two is close in orientation to
the starting orientation, the minimum change in ori-
entation is taken, otherwise the ray-casting-based ori-
entation is neglected and the starting orientation is in-
evitably used (ray-casting did not work).
C. Optical Flow. The last orientation estimation
method is based upon Optical flow. The Optical flow
algorithm measures the apparent motion of objects in
images caused by displacement of the object or move-
ment of the camera between two frames. The result
is an 2D vector field, where each vector shows the
displacement of movement of points between the first
and the second frame. The optical flow algorithm is
based on Farneb
¨
ack’s algorithm (Farneb
¨
ack, 2003).
To compute the orientation for all vehicles, we
first apply a threshold on the magnitude of the optical
flow to only select pixels with sufficient movement.
Next, the 2D box of each object is used to select the
flow vectors that correspond to each object. The ori-
entation is then estimated as the median of the orienta-
tions of the Optical flow vectors. An example of Opti-
cal flow-based orientation estimation is visualized in
Figure 4e, where the background colors indicate the
motion directions of points.
3.2 3D Box Generation
The outputs of the prior knowledge, segmentation and
orientation estimation steps are the input for the con-
struction of the actual 3D boxes. Note that the meth-
ods for creating the 3D boxes in this section are only
used to create annotations to train the actual detec-
tion model. The final detection for live operation di-
rectly estimates the 3D box using the KM3D detector
(see Figure 2). This section describes two methods
for generating 3D box annotations. The first method
is dependent on a correct segmentation map of each
object in the scene and is called ‘Segmentation fit-
ting’, while the second method ‘Simple Box’ relies
on prior information only and does not require seg-
mentation of vehicles. Note that both these methods
rely on an estimated orientation, provided by one of
the methods described in Section 3.1. On straight road
sections this estimation is based on prior knowledge.
For curved roads an estimation based on PCA, PCA
with ray-casting, or Optical flow is created. Hence,
although the estimated orientation differs when a ve-
hicle is not on a straight road section, the 3D box gen-
eration methods are similar.
A. Segmentation Fitting. The generation of 3D
boxes based on a segmentation uses the box-fitting
algorithm of (Dubsk
´
a et al., 2014), where a 3D box
is constructed using three vanishing points. The first
vanishing point is located at the crossing of the hori-
zon line and the line in the direction of the estimated
vehicle orientation. The second point is the crossing
of the horizon line with the line orthogonal to the ve-
hicle orientation. This orientation is estimated in the
real-world domain using the camera-projection ma-
trix. The third point is the vertical vanishing point of
the scene, which results from camera calibration.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
100

1
2
3
4
5
6
(a) Fitted vanishing lines.
1
2
3
4
5
6
7
8
(b) Remaining points. (c) Resulting 3D box. (d) Average height 3D box.
Figure 5: Segmentation fitting as the work of Dubsk
´
a et al.where the vanishing lines (red) are fit to the contour (green). The
intersections provide corner-points (yellow) for the 3D box. The blue lines are the remaining vanishing lines used to find the
last corner-points.
The algorithm is now as follows (based
on (Dubsk
´
a et al., 2014)). First, two lines are
drawn originating at each of the three vanishing
points along the sides of the contour, shown as the
six red lines in Figure 5a. At the intersections of
the lines, six corner-points of the 3D box are found,
denoted by the numbered yellow dots (1-6). The last
two corner points (7,8) are found as the intersection
of lines from corner points 2, 3, 5 and 6 towards
the vanishing points (denoted by the blue lines in
Figure 5b). The height of the different points of the
top surface can vary between corner points because
they are estimated individually. However, we assume
the roof of a vehicle to be parallel to the ground
surface and therefore use the average height of these
roof points in the final 3D box, as shown in Figure 5d.
B. Simple Box. Instead of using a segmentation mask
for each vehicle, we propose a novel method to es-
timate a 3D box based on statistical vehicle dimen-
sions. The method requires a 2D bounding box, cam-
era calibration and the vehicle orientation, to convert
this information to a 3D box. We assume a fixed ve-
hicle width and determine length and height dynami-
cally from the 2D box fit. Furthermore, the three van-
ishing points are defined in an identical way as in the
segmentation fitting method. The 3D box generation
is carried out by the following steps.
First, we define one of the two bottom corners of
the annotated 2D box as the starting point, depending
on the estimated orientation (left- or right-facing car).
The second point is located at the end of a line seg-
ment from the first point towards the second vanish-
ing point (orthogonal to the vehicle orientation) with
the statistical vehicle width as its length. This is de-
picted by the blue line and the points 1 and 2 in Fig-
ure 6a. The back-corner point (3) is found by defin-
ing the orientation line along the length of the car at
the ground plane that crosses the 2D box, resulting
in point (3). The last ground-plane point (4) is com-
puted from the third point, by drawing a line segment
with fixed length (statistical vehicle width) towards
the second vanishing point. The corner-point of the
2D box (point 5) is used as the top of the 3D box.
The vehicle height is defined as the distance between
points 5 and 3 (Figure 6a). The remaining points of
the top of the 3D box can be constructed from point 5
(using the vehicle width/length), or from the ground-
plane points (using the height) (see Figure 6b). The
final obtained 3D box is depicted in Figure 6c.
We have found that the vehicle height is often es-
timated too low, caused by small variations in the 2D
box locations and the orientation estimations. The es-
timated height is pragmatically adjusted if it is below
a threshold T
height
, by slightly modifying the orienta-
tion. The orientation estimation is updated with one
degree in a direction such that the estimated height
becomes closer to the average vehicle height. The
adapted direction depends on the orientation of the
vehicle. The threshold T
height
is defined as the statis-
tical average vehicle height H
avg
minus the H
variation
value. This process of updating the orientation is re-
peated until the estimated vehicle height exceeds the
threshold. The selected threshold values are discussed
in Section 4(A).
4 EXPERIMENTS
The 3D box generation processing is evaluated with
two different approaches. First, we evaluate a direct
approach where the output of the annotation process
(without the 3D detector) is considered. Second, we
train and evaluate the performance of the 3D object
detector (KM3D (Li, 2020)) based on the output of
the box generation. In two additional experiments
with the KM3D detector, a cross-validation between
our dataset and the KITTI dataset is presented and an
unsupervised approach of the generation pipeline is
evaluated.
A. Configuration. All experiments are carried out
on 4 different processing pipeline configurations. The
first three configurations use a segmentation mask as
input for the ‘segmentation fitting’ technique to esti-
mate the 3D box. The orientation estimation in each
3D Detection of Vehicles from 2D Images in Traffic Surveillance
101

1
2
3
4
5
(a) Estimated ground-
surface points based on
vehicle width.
1
2
3
4
5
6
7
8
(b) The remaining roof
points estimated based on
vanishing lines.
(c) Resulting 3D box.
.
Figure 6: Simple Box construction method for corner-points (yellow) of the 3D box with the assumption that a car has an
width of 1.75m (blue arrows). The other 3D corner-points are calculated through the estimated vanishing lines (red and cyan)
and their intersections.
of these three pipelines is carried out with PCA, PCA
+ ray-casting or optical flow. The fourth pipeline is
based on the Simple box 3D box estimation tech-
nique, and uses Optical flow-based orientation esti-
mation, such that it does not depend on an object
segmentation map. The Farneb
¨
ack (Farneb
¨
ack, 2003)
Optical-flow algorithm is computed on a pyramid of 3
layers, where each layer is a factor of two smaller than
the previous one. The averaging window size is 15
pixels. In all experiments using a segmentation mask,
Mask-RCNN (pre-trained on the COCO dataset (Lin
et al., 2015)) is used to predict 2D boxes and the cor-
responding object segmentation. The Mask-RCNN
segmentation masks have proven to be accurate for
vehicles in surveillance scenarios. The detection
threshold is set to 0.75 and a minimum IoU thresh-
old of 0.5 is applied to match between detections and
ground-truth boxes. For the Simple box method, the
vehicle width is set to 1.75 meters and the average
height H
avg
= 1.5 meters. We have empirically de-
termined a maximum offset of H
variation
= 0.25 me-
ters with respect to the statistical average height H
avg
,
resulting in T
height
= 1.3 m. For training the KM3D
model, we have used the parameters, data prepara-
tion and augmentation process from the original im-
plementation (Li, 2020). We train for 50 epochs using
learning rate 5 × 10
−5
and a batch size of 16.
B. Traffic Surveillance Dataset. Our experiments
are carried out on a proprietary traffic surveillance
dataset annotated with 2D boxes. This dataset con-
tains 25 different surveillance scenes of different traf-
fic situations like roundabouts, straight road sections
and various crossings. The dataset is split in 20k train-
ing images and 5k validation images, with 60k and
15k annotations, respectively. The ground-truth test
set used for evaluation consists of 102 images with
444 3D boxes which are manually annotated. This
set contains 8 different surveillance scenes, which are
outside the training and validation sets. In all ex-
periments except the cross-validation experiment, we
combine the train dataset from KITTI (Geiger et al.,
2012) with the train part of our dataset to increase the
amount of data.
C. Evaluation Metrics. In our experiments, we mea-
sure the average precision 3D IoU (AP3D) and av-
erage orientation similarity (AOS), as defined by the
KITTI dataset (Geiger et al., 2012), with two differ-
ent IoU thresholds of 50% and 70%. Next to these
existing metrics, we introduce the Middle point Mean
Error (MME) of the ground surface. This MME is
defined as:
MME =
1
N
N−1
∑
i=0
q
( ˆx
i
− x
i
)
2
+ ( ˆy
i
− y
i
)
2
, (1)
where N is the total number of true positive detec-
tions, ˆx and ˆy are the ground-truth x- and y-locations
of the middle-point on the ground surface in real-
world coordinates, where x and y are the estimated
x- and y-locations. This metric depicts the aver-
age location error of the center point on the ground
plane in 3D world-coordinates (ignoring the vehicle
width/height/length dimension).
4.1 Optimizing 3D Annotation Pipeline
This experiment evaluates the four different annota-
tion pipeline configurations, which create 3D annota-
tions from the existing 2D annotated datasets. To this
end, all pipelines are executed on the testing dataset,
where the 2D annotated boxes of the testing dataset
are used as input. The resulting 3D boxes generated
by the different pipelines are compared with the man-
ually annotated 3D boxes in the testing dataset.
The results of the proposed pipelines are shown
in the left part of Table 1. The Simple box pipeline
clearly results in the best detection score (IoU=0.5)
with 36.4% mAP for Hard objects, most accurate
center-point estimation (MME=0.66) and best orien-
tation estimation (AOS=93.8). Note that detection
performance for the strict IoU=0.7 evaluation is very
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
102

Table 1: Comparison of 3D annotation processing configurations without 3D object detector (left) and the same comparison
for the 3D annotation configurations with trained 3D detector on the data generated by the configurations (right). Detection
performance increases with the addition of the 3D detector (IoU=0.5). The Simple box-based pipeline is the best.
3D Annotation pipeline 3D Annotation pipeline + 3D detector
AP3D IoU=0.7 / IoU=0.5 MME AOS AP3D IoU=0.7 / IoU=0.5 MME AOS
Pipeline Easy Moderate Hard Easy Moderate Hard
PCA 5.9/42.1 5.7/37.6 3.3/23.3 0.80 84.7 2.8/53.5 2.9/49.8 2.5/35.9 0.66 89.2
RayCast. 6.0/41.9 5.8/31.7 3.3/22.9 0.80 84.9 3.5/53.3 3.6/48.0 2.9/34.0 0.85 89.4
Opt.Flow 7.1/52.0 6.5/39.5 3.8/24.8 0.71 90.0 4.2/62.8 5.6/51.0 3.8/42.9 0.66 89.5
Simple b. 18.9/59.7 13.1/46.7 9.9/36.4 0.66 93.8 26.2/73.4 19.9/62.9 15.6/51.9 0.70 89.6
limited, probably because of the inaccurate 3D boxes
generated by the pipeline. The practical performance
for IoU=0.5 is representative for the application of
video surveillance.
A. Orientation Estimation. PCA and ray-casting
both depend on the segmentation map. Whereas
PCA is dependent on the mass of the segmentation,
ray-casting fits to the contours of the segmentation.
The ray-casting technique (84.9%) results in a mi-
nor improvement in AOS score with respect to PCA
(84.7%). Since the AOS scores of Optical flow and
Simple box are higher, which both use Optical flow
as methods for orientation estimation, it can be con-
cluded that Optical flow outperforms the segmenta-
tion map-based methods. However, Optical flow can-
not be computed when previous/next frames are not
available, then the ray-casting method can be used.
B. Segmentation Fitting. Visual inspection of the
3D generated box results of the segmentation fitting-
based methods show that the main cause of errors
is the width and length estimation, as shown in Fig-
ure 7a. In this example, the length is estimated 1 me-
ter too short. These errors are caused by segmentation
maps that do not perfectly align with the actual ob-
ject contours. The segmentation maps do not consis-
tently include the headlights, wheels and other parts
of the vehicles and sometimes include vehicle shad-
ows. Although we always map the Mask-RCNN de-
tection and segmentation output to our ground-truth
(a) Segmentation fitting. (b) Simple box.
Figure 7: Two examples of cases which result in wrongly
estimated 3D boxes. At the left-hand side, a segmentation
fitting problem occurs because the front-right wheel point
is estimated too far to the right and does not extend beyond
the wheel in length. At the right-hand side, the Simple box
method will estimate the box too high because the 2D-box
bottom line does not touch the ground surface but aligns
with the vehicle bumper. The dashed red line depicts the
desired bottom line for the 2D-box.
2D bounding-boxes to ensure that no false detections
are used as 3D ground truth, we rely on the quality of
the generated segmentation maps from Mask-RCNN.
C. Simple Box. The Simple box pipeline results
in higher performance than the segmentation fitting-
based methods (36.4% vs. 22-24% AP3D). From
these results we conclude that a 2D box annotation
and orientation information is sufficient to estimate a
3D box. Visual inspection of the results show that
errors commonly originate from 2D bounding boxes
of which the bottom line is not touching the ground
plane. In such a case, the starting point for the Sim-
ple box method is too high, so that the constructed 3D
box floats in the air (see the examples in Figure 7b).
4.2 3D Annotation Pipeline + Detector
In this experiment, the KM3D detector is trained on
the 3D annotations generated by the different annota-
tion configurations. The performance of the KM3D
detector is measured on the test dataset.
The scores from the detection results are shown at
the right-hand side of Table 1. The addition of the 3D
detector results in a significantly increased detection
performance (increase of 12-18% AP3D) for all con-
figurations with respect to the direct 3D annotation
pipeline results (left-hand side in Table 1). Visual in-
spection of the detection results for PCA, ray-casting
and Optical flow shows that the estimated ground sur-
face is estimated better by the 3D detector than the
direct output of the annotation pipeline. This means
that the annotation quality of the generated 3D box
dataset is sufficient to train a model that generalizes
over all the noisy input data.
Some detection results of the 3D detector trained
with annotations from Simple box are shown in Fig-
ure 8. These images visualize three limitations of the
method. First, not every vehicle is estimated on the
ground surface. Second, the orientation estimation of
vehicles that are driving in a horizontal direction are
prone to errors. Third, the height of the vehicles of-
ten seems to be estimated too low. However, more
detailed measurements for the estimated vehicle di-
mensions show that the height, length and width have
3D Detection of Vehicles from 2D Images in Traffic Surveillance
103

(a) Correct results in a complex scene. (b) Some faulty orientation estimations in the back.
(c) Horizontally oriented vehicle is estimated incorrectly. (d) Incorrect height estimation.
Figure 8: Detection results of KM3D trained with the annotations generated by the SimpleBox pipeline. Partially blurred for
privacy reasons. Majority of the 3D bounding-boxes are accurately estimated.
a mean offset with respect to the ground-truth annota-
tions of 0.05, 0.02 and 0.01 meters, respectively.
Median MME per 10m
0 25 50 75 100 125 150 175
Absolute distance [m]
0
1
2
3
4
5
Figure 9: Box plot showing the median (blue dots) of the er-
ror for objects at each 10-m distance from the camera. Lines
above and under the dots represent the standard deviations
for errors estimated further away and nearby, respectively.
In a last experiment with the KM3D detector we
investigate the effect of the distance of each vehicle
to the camera on the accuracy of the 3D box esti-
mation, trained by using annotations from the Simple
box pipeline. We calculate the error in steps of 10-m
distance from the camera. The results are shown in
Figure 9. The blue dots show the median values for
each 10-m interval, the blue lines above/below rep-
resent the standard deviations of the errors of detec-
tions at larger/smaller distance. From the results, it
can be observed that accurate position estimation is
possible until about 130-m distance. The MME met-
ric becomes inaccurate from about 140-m distance,
but our test set lacks the images to validate this in
more detail. Note that the manual generation of 3D
ground-truth boxes also becomes more inaccurate at
Table 2: Cross-validation on the KITTI dataset with the
KM3D detector, based on the AP3D metric (IoU=0.5). The
3D annotations for training are generated with the Simple
box pipeline.
Train set Test set Easy Mod. Hard
KITTI KITTI 51.4 41.0 33.5
KITTI & Ours KITTI 55.3 44.7 35.2
KITTI Ours 5.2 3.87 2.3
Ours Ours 66.0 60.1 43.4
KITTI & Ours Ours 73.4 62.7 51.9
larger distance to the camera (and thus, lower resolu-
tion). Moreover, a small offset in image coordinates
far away from the camera can lead to large errors in
the real-world locations.
4.3 Cross-validation on KITTI Dataset
This experiment evaluates the baseline KM3D detec-
tor on our test set and performs a cross-validation on
the well-known KITTI dataset (Geiger et al., 2012).
Although KITTI data focuses on autonomous driving,
this will provide insight in the differences with our
application. The KM3D detector is trained indepen-
dently on KITTI, our dataset, and the combination.
Our training set annotations are generated using the
Simple box pipeline. Evaluation is carried out by in-
ference on the KITTI test set and our test set. The
results are measured by the AP3D metric.
Table 2 depicts the obtained results. The original
results on the KITTI test set are similar to the original
work (Li, 2020). Testing the KITTI-trained model on
our dataset results in poor performance because of the
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
104

Table 3: Detection performance when using unsupervised
Simple box pipeline (replacing 2D annotations with Mask-
RCNN output). Unsupervised performance (US) is lower
than when using the original 2D annotations.
AP3D IoU=0.5 MME
Method Easy Mod. Hard
3D annotations 59.7 46.7 36.4 0.66
3D annotations US 37.4 31.5 15.6 0.76
3D ann. + KM3D 73.4 62.9 51.9 0.70
3D ann. + KM3D US 67.3 55.8 40.7 0.65
changed viewpoints. Training on the combination of
both datasets increases the AP3D with about 3% on
the easy cases when evaluating on the KITTI dataset.
The AP3D performance on our dataset increases from
55.6% to 62.5%. Although the two datasets contain
different camera viewpoints, the detection model ef-
fectively uses this information to generalize better.
4.4 Unsupervised Approach
This experiment investigates the effect of replac-
ing the 2D box annotations with automatic detec-
tions from Mask-RCNN, thereby limiting the anno-
tation effort to scene and camera-calibration parame-
ters only. The 2D annotations which are used in the
Simple box pipeline are created using the pre-trained
Mask-RCNN detection network, instead of using the
annotated 2D boxes. We apply this modified Simple
box pipeline directly to our train and test set images
and train the KM3D detector on the output.
The results are shown in Table 3. The pipeline
with the 3D object detector has superior results over
the unsupervised configuration without 3D object de-
tector. The AP3D performance gap is 20 − 25%.
The AP3D difference between the unsupervised con-
figuration and the supervised configuration is only
6 − 11%. Visual inspection shows that the 2D de-
tection set generated by Mask-RCNN contains many
false detections. This results in falsely annotated
3D boxes in our Simple box pipeline and causes the
KM3D detector to learn false objects. Nevertheless,
since the unsupervised pipeline is fully automatic and
requires no prior annotations, it shows opportunities
for future work.
5 CONCLUSION
We have investigated the detection of 3D bounding
boxes for objects using calibrated static monocular
cameras in traffic surveillance scenes. It has been
found that it is possible to directly estimate 3D boxes
of vehicles in the 2D camera image using a 3D object
detector. We have selected the KM3D CNN-based
detection model, which has only been applied ear-
lier in autonomous driving with different viewpoints.
Although the 3D object detector can be directly ap-
plied to traffic surveillance, 3D public datasets are not
available to train the 3D detection model.
Therefore, we propose a system to semi-
automatically construct 3D box annotations, by ex-
ploiting camera-calibration information and simple
scene annotations (static vanishing points). To this
end, we use existing traffic surveillance datasets with
2D box annotations and propose a processing pipeline
to convert the 2D annotations to 3D boxes. The result-
ing 3D annotated dataset is used to train the KM3D
object detector. The trained 3D detector can be di-
rectly integrated in surveillance systems, as inference
only requires 2D images and camera calibration.
For optimization, we have validated four different
annotation processing configurations, each contain-
ing orientation estimation, segmentation and 3D con-
struction components. In addition to combinations
of existing components, we propose the novel Sim-
ple box method. This method does not require seg-
mentation of vehicles and provides a more simple 3D
box construction, assuming a fixed predefined vehicle
width. When comparing our different 3D annotation
configurations, we have found that the Simple box
pipeline provides the best object annotation results,
albeit all four configurations result in accurate orien-
tation estimation and localization. Using the 3D box
annotations from Simple box directly (without the 3D
object detector), the AP3D score is 36.4% which im-
proves to 51.9% AP3D when using KM3D trained on
this data. Similarly, we have found that the differ-
ent viewpoints from the KITTI autonomous driving
dataset actually increase performance when adding it
to our traffic set.
The experimental results show that it is possible to
use a 2D dataset to generate a 3D dataset. It has been
shown that the existing KM3D object detector trained
on the generated dataset generates more accurate 3D
vehicle boxes than the vehicle annotations from the
proposed automatic 3D annotation pipeline, due to its
capacity to generalize. The resulting 3D box detec-
tions are accurate (51.9% AP3D), both in locations
and size, up to about 125 meters from the camera. The
use of unsupervised annotation using existing 2D de-
tectors can potentially increase the 3D detection per-
formance even further.
REFERENCES
Brazil, G. and Liu, X. (2019). M3d-rpn: Monocular 3d
region proposal network for object detection.
3D Detection of Vehicles from 2D Images in Traffic Surveillance
105

Brouwers, G., Zwemer, M., Wijnhoven, R., and With, P.
(2016). Automatic calibration of stationary surveil-
lance cameras in the wild. In Proc. of the IEEE CVPR.
Cai, Y., Li, B., Jiao, Z., Li, H., Zeng, X., and Wang, X.
(2020). Monocular 3d object detection with decou-
pled structured polygon estimation and height-guided
depth estimation. In AAAI.
Chen, X., Kundu, K., Zhang, Z., Ma, H., Fidler, S., and
Urtasun, R. (2016). Monocular 3d object detection
for autonomous driving. In Proc. of the IEEE CVPR.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In 2005 IEEE com-
puter society conference on computer vision and pat-
tern recognition (CVPR’05), volume 1, pages 886–
893. Ieee.
Ding, M., Huo, Y., Yi, H., Wang, Z., Shi, J., Lu, Z., and
Luo, P. (2020). Learning depth-guided convolutions
for monocular 3d object detection. In Proc. of the
IEEE/CVF Conference on CVPR.
Dubsk
´
a, M., Herout, A., and Sochor, J. (2014). Auto-
matic camera calibration for traffic understanding. In
BMVC, volume 4,6, page 8.
Farneb
¨
ack, G. (2003). Two-frame motion estimation based
on polynomial expansion. In Scandinavian Conf. on
Image Analysis. Springer.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In Conf. on CVPR.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proc. of the IEEE ICCV.
Li, P. (2020). Monocular 3d detection with geometric con-
straints embedding and semi-supervised training.
Li, P., Zhao, H., Liu, P., and Cao, F. (2020). Rtm3d:
Real-time monocular 3d detection from object key-
points for autonomous driving. arXiv preprint
arXiv:2001.03343.
Lin, T.-Y., Maire, M., Belongie, S., Bourdev, L., Girshick,
R., Hays, J., Perona, P., Ramanan, D., Zitnick, C. L.,
and Doll
´
ar, P. (2015). Microsoft coco: Common ob-
jects in context.
Mousavian, A., Anguelov, D., Flynn, J., and Kosecka, J.
(2017). 3d bounding box estimation using deep learn-
ing and geometry.
Nilsson, M. and Ard
¨
o, H. (2014). In search of a car - uti-
lizing a 3d model with context for object detection.
In Proceedings of the 9th International Conference on
Computer Vision Theory and Applications - Volume
2: VISAPP, (VISIGRAPP 2014), pages 419–424. IN-
STICC, SciTePress.
Sochor, J.,
ˇ
Spa
ˇ
nhel, J., and Herout, A. (2018). Boxcars: Im-
proving fine-grained recognition of vehicles using 3-d
bounding boxes in traffic surveillance. IEEE transac-
tions on intelligent transportation systems.
Sullivan, G. D., Baker, K. D., Worrall, A. D., Attwood, C.,
and Remagnino, P. (1997). Model-based vehicle de-
tection and classification using orthographic approxi-
mations. Image and vision computing, 15(8):649–654.
Wijnhoven, R. G. and de With, P. H. (2011). Unsuper-
vised sub-categorization for object detection: Find-
ing cars from a driving vehicle. In 2011 IEEE Inter-
national Conference on Computer Vision Workshops
(ICCV Workshops), pages 2077–2083. IEEE.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
106
