
Continuous Perception for Classifying Shapes and Weights of Garments
for Robotic Vision Applications
Li Duan
a
and Gerardo Aragon-Camarasa
b
School of Computing Science, University of Glasgow, Glasgow, U.K.
Keywords:
Continuous Perception, Depth Images, Shapes and Weights Predictions.
Abstract:
We present an approach to continuous perception for robotic laundry tasks. Our assumption is that the visual
prediction of a garment’s shapes and weights is possible via a neural network that learns the dynamic changes
of garments from video sequences. Continuous perception is leveraged during training by inputting consec-
utive frames, of which the network learns how a garment deforms. To evaluate our hypothesis, we captured
a dataset of 40K RGB and depth video sequences while a garment is being manipulated. We also conducted
ablation studies to understand whether the neural network learns the physical properties of garments. Our
findings suggest that a modified AlexNet-LSTM architecture has the best classification performance for the
garment’s shapes and discretised weights. To further provide evidence for continuous perception, we evaluated
our network on unseen video sequences and computed the ’Moving Average’ over a sequence of predictions.
We found that our network has a classification accuracy of 48% and 60% for shapes and weights of garments,
respectively.
1 INTRODUCTION
Perception and manipulation in robotics are an inter-
active process which a robot uses to complete a task
(Bohg et al., 2017). That is, perception informs ma-
nipulation, while manipulation of objects improves
the visual understanding of the object. Interactive per-
ception predicates that a robot understands the con-
tents of a scene visually, then acts upon it, i.e. ma-
nipulation starts after perception is completed. In
this paper, we depart from the idea of interactive
perception and theorise that perception and manip-
ulation run concurrently while executing a task, i.e.
the robot perceives the scene and updates the ma-
nipulation task continuously (i.e. continuous percep-
tion). We demonstrate continuous perception in a de-
formable object visual task where a robot needs to
understand how objects deform over time to learn its
physical properties and predict the garment’s shape
and weight.
Due to their materials’ physical and geometric
properties, garments usually have folds, crumples
and holes, which are irregular shaped and config-
ured, making garments to have a high-dimensional
state space. Therefore, when a robot manipulates a
a
https://orcid.org/0000-0002-0388-752X
b
https://orcid.org/0000-0003-3756-5569
garment, the deformations of the garment is unpre-
dictable and complex. Due to the high dimensionality
of garments and complexity in scenarios while ma-
nipulating garments, previous approaches for predict-
ing categories and physical properties of garments are
not robust to continuous deformations (Tanaka et al.,
2019)(Mart
´
ınez et al., 2019). Prior research (Bhat
et al., 2003)(Tanaka et al., 2019), (Runia et al., 2020)
has leveraged the use of simulated environments to
predict how a garment deforms, however, real-world
manipulation scenarios such as grasping, folding and
flipping garments are difficult to be simulated because
garments can take an infinite number of possible con-
figurations in which a simulation engine may fail to
capture. Moreover, simulated environments can not
be fully aligned with the real environment, and a
slight perturbation in the real environment will cause
simulations to fail.
Garment configurations (garment state space)
have high dimensionality, therefore motion planning
for garments requires a high dimensionality space.
This motion planning space should represent the dy-
namic characteristics of garments and the robot’s dy-
namic capabilities to successfully plan a motion. In
this paper, we argue that it is need to learning physi-
cal properties first to enable robotic manipulation of
garments (and other deformable objects). Garment
348
Duan, L. and Aragon-Camarasa, G.
Continuous Perception for Classifying Shapes and Weights of Garments for Robotic Vision Applications.
DOI: 10.5220/0010804300003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
348-355
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

shapes and weights are two important geometric and
physical properties of garments. In this paper, we
therefore learn the physical and geometric proper-
ties of garments from real-world garment samples.
For this, garments are being grasped from the ground
and then dropped. This simple manipulation scenario
allows us to train a neural network to perceive dy-
namic changes from depth images and learn physical
(weights) and geometric (shapes) properties of gar-
ments while being manipulated, see Fig 1.
To investigate the continuous perception of de-
formable objects, we have captured a dataset contain-
ing video sequences of RGB and depth images. We
aim to predict the physical properties (i.e. weights)
and categories of garment shapes from a video se-
quence. Therefore, we address the state-of-the-art
limitations by learning dynamic changes as opposed
to static representations of garments (Jim
´
enez and
Torras, 2020; Ganapathi et al., 2020). We use weight
and shape as the experimental variables to support
our continuous perception hypothesis. We must note
that we do not address manipulation in this paper
since we aim to understand how to equip a robot
best to perceive deformable objects visually, as serves
as a prerequisite for accommodating online feedback
corrections for garment robotic manipulation. Our
codes and datasets are available at: https://github.
com/cvas-ug/cp-dynamics
2 BACKGROUND
Bhat (Bhat et al., 2003) proposed an approach to
learn physical properties of clothes from videos by
minimising a squared distance error (SSD) between
the angle maps of folds and silhouettes of the sim-
ulated clothes and the real clothes. However, their
approach observes high variability while predicting
physical properties of clothes such as shear damping,
bend damping and linear drag. Li et al. (Li et al.,
2018; Li et al., 2020) has proposed to integrate par-
ticles to simulate simple fabrics and fluids in order
to learn rigidness and moving trajectories of a de-
formable object using a Visually Grounded Physics
Learner network (VGPL). By leveraging VGPL to-
gether with an LSTM, the authors can predict the
rigidness and future shapes of the object. In their re-
search, they are using particles to learn the dynamic
changes of objects. In contrast, due to the high dimen-
sionality and complexity of garments, particles are an
approximation to the dynamic changes which cannot
be fully described for a robot manipulation task. In
Bhat(Bhat et al., 2003)’s work, they study the phys-
ical properties of garments by comparing differences
between motion video frames of real and simulated
garments, where they only aim to match the shapes
between real and simulated garments. In our work,
we learn the physical properties of garments through
continuously perceiving video frames of grasped gar-
ments, which means we learn deformations of gar-
ments rather than shapes of garments. Deformations
of garments encode dynamics characteristics of gar-
ments, which depend on their physical and geometric
properties. Therefore, our network has higher accu-
racy while predicting physical and geometric proper-
ties of garments (equivalent to shapes and weights of
garments) compared to (Bhat et al., 2003).
To learn elasticity of objects, Senguapa et al.
(Sengupta et al., 2020) has proposed an approach
where a robot presses the surface of objects and ob-
serves the object’s shape changes in a simulated and
a real environment. They aimed to find the difference
of the simulated and real objects Young’s modules to
estimate the object’s elasticity and estimate forces ap-
plied on the object without any force sensor. Tanake
et al. (Tanaka et al., 2019) minimised the shape dif-
ference between real and simulated garments to find
their stiffness. In these two approaches, if there ex-
ists a small variation between simulation and reality
or if an unseen object is presented, their approaches
require to simulate novel object models again as the
simulation is limited to known object models.
Compared with previous research that has utilised
temporal images to analyse the physical properties
of deformable objects, Davis et al. (Davis et al.,
2015) chose to investigate deformable objects’ phys-
ical properties in terms of their vibration frequen-
cies. That is, they employed a loudspeaker to gen-
erate sonic waves on fabrics to obtain modes of vi-
bration of fabrics and analysed the characteristics of
these modes of vibration to identify the fabrics materi-
als. The main limitation of this approach is in the use
of high-end sensing equipment which would make it
impractical for a robotic application. In this paper, we
employ an off-the-shelf RGBD camera to learn dy-
namic changes of garments.
Yang et al. (Yang et al., 2017) has proposed a
CNN-LSTM architecture. Their method consists of
training a CNN-LSTM model to learn the stretch stiff-
ness and bend stiffness of different materials and then
apply the trained model to classify garment material
types. However, suppose a garment consists of mul-
tiple materials. In that case, the CNN-LSTM model
will not be able to predict its physical properties be-
cause their work focuses on garments with only one
fabric type. Mariolis et al. (Mariolis et al., 2015) de-
vised a hierarchical convolutional neural network to
conduct a similar experiment to predict the categories
Continuous Perception for Classifying Shapes and Weights of Garments for Robotic Vision Applications
349

of garments and estimate their poses with real and
simulated depth images. Their work has pushed the
accuracy of the classification from 79.3% to 89.38%
with respect to the state of the art. However, the main
limitations are that their dataset consists of 13 gar-
ments belonging to three categories. In this paper, we
address this limitation by compiling a dataset of 20
garments belonging to five categories of similar ma-
terial types, and we have evaluated our neural network
to predict unseen garments.
Similar to this work, Martinez et al. (Mart
´
ınez
et al., 2019) has proposed a continuous perception
approach to predict the categories of garments by ex-
tracting Locality Constrained Group Sparse represen-
tations (LGSR) from depth images of the garments.
However, the authors did not address the need to un-
derstand how garments deform over time continu-
ously as full sequences need to be processed in order
to get a prediction of the garment shape. Continuous
predictions is a prerequisite for accommodating dex-
terous robotic manipulation and online feedback cor-
rections to advanced garment robotic manipulation.
3 MATERIALS AND METHODS
We hypothesise that continuous perception allows a
robot to learn the physical properties of clothing items
implicitly (such as stiffness, bending, etc.) via a Deep
Neural Network (DNN) because a DNN can predict
the dynamic changes of an unseen clothing item above
chance. For this, we implemented an artificial neu-
ral network that classifies shapes and weights of un-
seen garments (Fig. 1 and Section 3.1). Our network
consists of a feature extraction network, an LSTM
unit and two classifiers for classifying the shape and
weight of garments. We input three consecutive frame
images (t, t + 1, t + 2) into our network to predict the
shape and weight of the observed garment from a pre-
dicted feature latent space at t + 3. We propose to use
the garment’s weight as an indicator that the network
has captured and can interpret the physical properties
of garments. Specifically, the garment’s weight is a
physical property and is directly proportional to the
forces applied to the garment’s fabric over the influ-
ence of gravity.
Garment Dataset. To test our hypothesis, we have
captured 200 videos of a garment being grasped from
the ground to a random point above the ground around
50 cm and then dropped from this point. Each gar-
ment has been grasped and dropped down ten times
in order to capture its intrinsic dynamic properties.
Videos were captured with an ASUS Xtion Pro, and
each video consists of 200 frames (the sampling rate
is 30Hz), resulting in 40K RGB and 40K depth im-
ages at a resolution of 480×680 pixels.
Our dataset features 20 different garments of five
garment shape categories: pants, shirts, sweaters,
towels and t-shirts. Each shape category contains four
unique garments. Garments are made of cotton ex-
cept for sweaters which are made of acrylic and ny-
lon. To obtain segmentation masks, we use a green
background, and we used a green sweater to remove
the influence of our arm. We then converted RGB im-
ages to a HSV colour space and identified an optimal
thresholding value in the V component to segment the
green background and our arm from the garment.
3.1 Network Architecture
Our ultimate objective is to learn the dynamic proper-
ties of garments as they are being manipulated. For
this, we implemented a neural network comprising
a feature extraction network, a recurrent neural net-
work, and a shape and a weight classifier networks.
Fig. 1 depicts the overall neural network architecture.
We split training this architecture into learning the ap-
pearance of the garment in terms of its shape first,
then learning the garments dynamic properties from
visual features using a recurrent neural network (i.e.
LSTM).
Feature Extraction. A feature extraction network
is needed to describe the visual properties of gar-
ments (RGB images) or to describe the topology of
garments (depth images). We therefore implemented
3 state of the art network architectures, namely
AlexNet(Krizhevsky et al., 2012),VGG 16(Simonyan
and Zisserman, 2014) and ResNet 18 (He et al., 2016).
In Section 4.2, we evaluate their potential for extrac-
tion features from garments.
Shape and Weight Classifiers. The classifier com-
ponents in AlexNet, Resnet and VGG-16 networks
comprise fully connected layers that are used to pre-
dict a class depending on the visual task. In these
layers, one fully connected layer is followed by a
rectifier and a regulariser, i.e. a ReLu and dropout
layers. However, in this paper, we consider whether
the dropout layer will benefit the ability of the neu-
ral network to generalise the classification prediction
for garments. The reason is that the image dataset
used to train these networks contain more than 1000
categories and millions of images (Krizhevsky et al.,
2012), while our dataset is considerable smaller (ref.
Section 3). The latter means that the dropout layers
may filter out useful features while using our dataset.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
350
t
t+1
t+n
-1
C
t
C
t+1
C
t+2
LSTM
Concatenate
F
F
F
C
t+3
FC
(Shape)
FC
(Weight)
Average
Pooling
Shape class
label
Weight
class label
[3,1,256,256] [3,256,15,15]
[3,256,15,15] [1,256,15,15]
(after reshaping from [1,57600])
See Sec.
III-B.2 for
details
hidden state dimension: (1, 256, 255)
cell state dimension: (1, 256, 255)
Sampling Rate: 30Hz
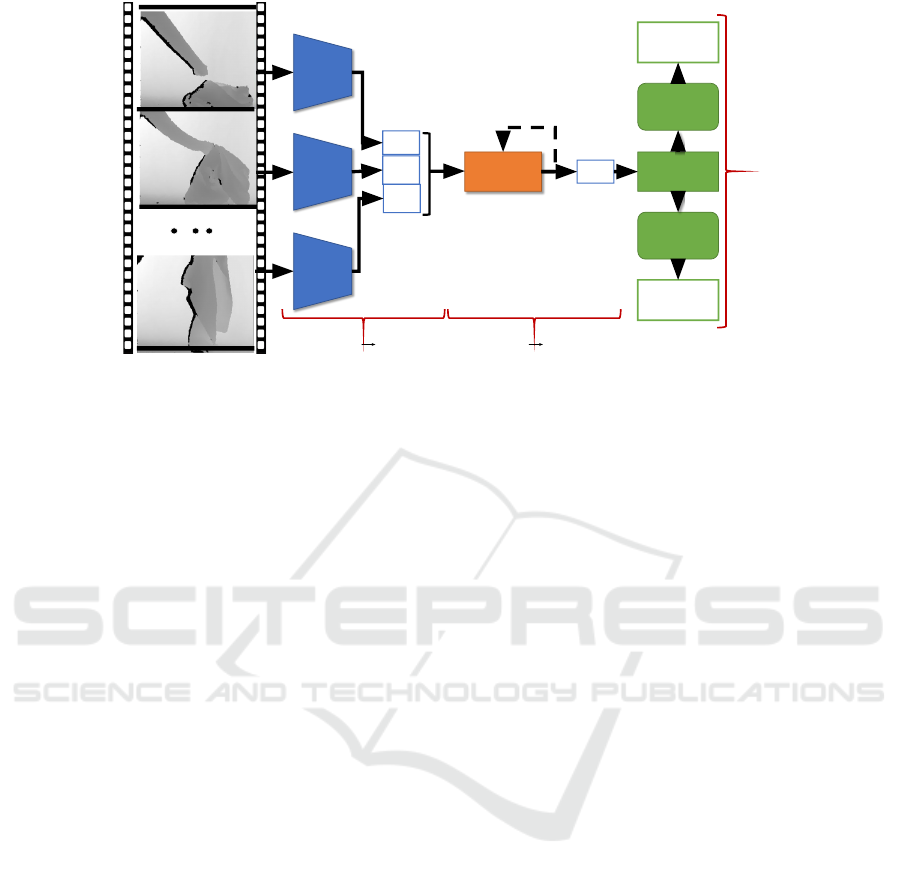
Figure 1: Our network is divided into feature extraction (F), an LSTM unit and classifier networks. Depth images of a garment
with a resolution of 256 × 256 pixels are passed to the feature extraction network. Three feature latent spaces, i.e. C
t
, C
t
+ 1
and C
t
+ 2 from time-steps t, t + 1 and t + 2, respectively, are concatenated and then passed to the LSTM. Each feature latent
space has a tensor size of 15 × 15 with a channel size of 256. From the LSTM, we obtain a predicted future feature latent
space (C
t
+ 3) which is reshaped back to the original feature space size (i.e. [1, 256, 15, 15]) and input to an average pooling
layer. The average pool output with size of [1, 256, 6, 6] is flattened to [1, 9216] and passed to the fully connected (FC) shape
and weight classifiers.
Dropout layers are useful when training large datasets
to avoid overfitting. Therefore, we have experimented
with modifying the fully connected networks by re-
moving the ReLu and dropout layers and observe their
impact on the shape and weight classification tasks.
After experimenting with four different network pa-
rameters, we found that the best performing structure
comprises three fully connected layer blocks, each of
which only contains a linear layer. The number of
features stays as 9216 without any reduction, then the
number reduces to 512 in the second layer, and fi-
nally, we reduce to 5 for shape and 3, for weight as
the outputs of the classifications. We do not include
these experiments in this paper as they do not directly
test the hypothesis of this paper but instead demon-
strates how to optimise the classification networks for
the shape and weight classifiers in this paper.
LSTM Rationale. The ability to learn dynamic
changes of garments is linked to perceiving the object
continuously and being able to predict future states.
That is, if a robot can predict future changes of gar-
ments, it will be able to update a manipulation task
on-the-fly by perceiving a batch of consecutive im-
ages rather then receiving a single image and act-
ing sequentially. For this, we have adopted a Long
Short-Term Memory (LSTM) network to learn the dy-
namic changes of consecutive images. After training
(ref. Section 3.2), we examined the ability to learn
garments’ dynamic changes by inputting unseen gar-
ments images into the trained feature extractor to get
their encoded feature maps and input those encoded
feature maps into the trained LSTM and evaluate if
the network (Fig. 1) can predict shapes and weights
classifications.
3.2 Training Strategy
We split training our architecture (Fig. 1) into two
parts. First, we let the network learn the appearance
or topology of garments by means of the feature ex-
traction and classification networks (Sections 3.1 and
3.1). After this, we then train the LSTM network
while freezing the parameters of the feature extrac-
tion and classification networks to learn the dynamic
changes of garments.
We have used pre-trained architectures for
AlexNet, Resnet 18 and VGG 16 but fine-tuned its
classifier component. For depth images, we fine-
tuned the input channel size of the first convolutional
layer from 3 to 1 (for AlexNet, Resnet 18 and VGG
16). The loss function adopted is Cross-Entropy be-
tween the predicted shape label and the target shape
label. After training the feature extraction networks,
we use these networks to extract features of consec-
utive images and concatenate features for the LSTM.
The LSTM learning task is to predict the next feature
description from the input image sequence, and this
predicted feature description is passed to the trained
classifier to obtain a predicted shape or weight label.
Continuous Perception for Classifying Shapes and Weights of Garments for Robotic Vision Applications
351

The loss function for training the LSTM consists of
the mean square error between the target feature vec-
tor and the predicted feature vector generated by the
LSTM, and the Cross-Entropy between the predicted
shape label and the target shape label. The loss func-
tion is:
L
total
= L
MSE
+ 1000 × L
Cross−Entropy
(1)
We have used a ’sum’ mean squared error during
training, but we have reported our results using the av-
erage value of the mean squared error of each point in
the feature space. We must note that we multiply the
cross-entropy loss by 1000 to balance the influence of
the mean squared error and cross-entropy losses.
4 EXPERIMENTS
For a piece of garment, shape is not an indicator of
the garment’s physical properties but the garment’s
weight as it is linked to the material’s properties such
as stiffness, damping, to name a few. However, ob-
taining ground truth for stiffness, damping, etc. re-
quires the use of specialised equipment and the goal
of this paper is to learn these physical properties im-
plicitly. That is, we propose to use the garment’s
weight as a performance measure to validate our ap-
proach using unseen samples of garments.
To test our hypothesis, we have adopted a leave-
one-out cross-validation approach. That is, in our
dataset, there are five shapes of garments: pants,
shirts, sweaters, towels and t-shirts; and for each type,
there are four garments (e.g. shirt-1, shirt-2, shirt-3
and shirt-4). Three of the four garments (shirt-1, shirt-
2 and shirt-3) are used to train the neural network, and
the other (shirt-4) is used to test the neural work (un-
seen samples). We must note that each garment has
different appearance such as different colour, dimen-
sions, weights and volumes. For weight classification,
we divided our garments into three categories: light
(the garments weighed less than 180g), medium (the
garments weighed between 180g and 300g) and heavy
(the garments weighted more than 300g).
We have used a Thinkpad Carbon 6th Generation
(CPU: Intel i7-8550U) equipped with an Nvidia GTX
970, running Ubuntu 18.04. We used SGD as the opti-
miser for training the feature extraction and classifica-
tion networks, with a learning rate of 1 × 10
−3
and a
momentum of 0.9 for 35 epochs. We then used Adam
for training the LSTM with a learning rate of 1 × 10
−4
and a step learning scheduler with a step size of 15
and decay rate of 0.1 for 35 epochs. The reason for
adopting different optimisers is that Adam provides a
better training result than SGD for training the LSTM,
while SGD observes faster training for the feature ex-
traction and classifiers. To test our hypothesis, we first
experiment on which image representation (RGB or
depth images) is the best to capture intrinsic dynamic
properties of garments. We also examined three dif-
ferent feature extraction networks to find the best per-
forming network for classifying shapes and weights
of garments (Section 4.1). Finally, we evaluate the
performance of our network on a continuous percep-
tion task (Section 4.2).
4.1 Feature Extraction Ablation
We have tested using three different deep convolu-
tional feature extraction architectures: AlexNet, VGG
16 and ResNet 18. We compared the performance of
shape and weight classification of unseen garments
with RGB and depth images. These feature extractors
have been coupled with a classifier without an LSTM;
effectively producing single frame predictions similar
to (Sun et al., 2017).
From Table 1, it can be seen that ResNet 18 and
VGG 16 overfitted the training dataset. As a conse-
quence, their classification performance is below or
close to a random prediction, i.e. we have 5 and 3
classes for shape and weight. AlexNet, however, ob-
serves a classification performance above chance for
depth images. By comparing classification perfor-
mances between RGB and depth images in Table 1,
we observe that depth images (47.6%) outperformed
the accuracy of a network trained on RGB images
(7.4%) while using AlexNet. The reason is that a
depth image is a map that reflects the distances be-
tween each pixel and the camera, which can capture
the topology of the garment. The latter is similar
to the findings in (Sun et al., 2017; Mart
´
ınez et al.,
2019).
We observe a similar performance while classi-
fying garments’ weights. AlexNet has a classifica-
tion performance of 48.3% while using depth im-
ages. We must note that the weights of garments that
are labelled as ’medium’ are mistakenly classified as
’heavy’ or ’light’. Therefore compared to the predic-
tions on shape, predicting weights is more difficult
for our neural network on a single shot perception
paradigm. From these experiments, we, therefore,
choose AlexNet as the feature extraction network for
the remainder of the following experiments.
4.2 Continuous Perception
To test our continuous perception hypothesis (Sec-
tion 3), we have chosen AlexNet and a window se-
quence size of 3 to predict the shape and weight of
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
352
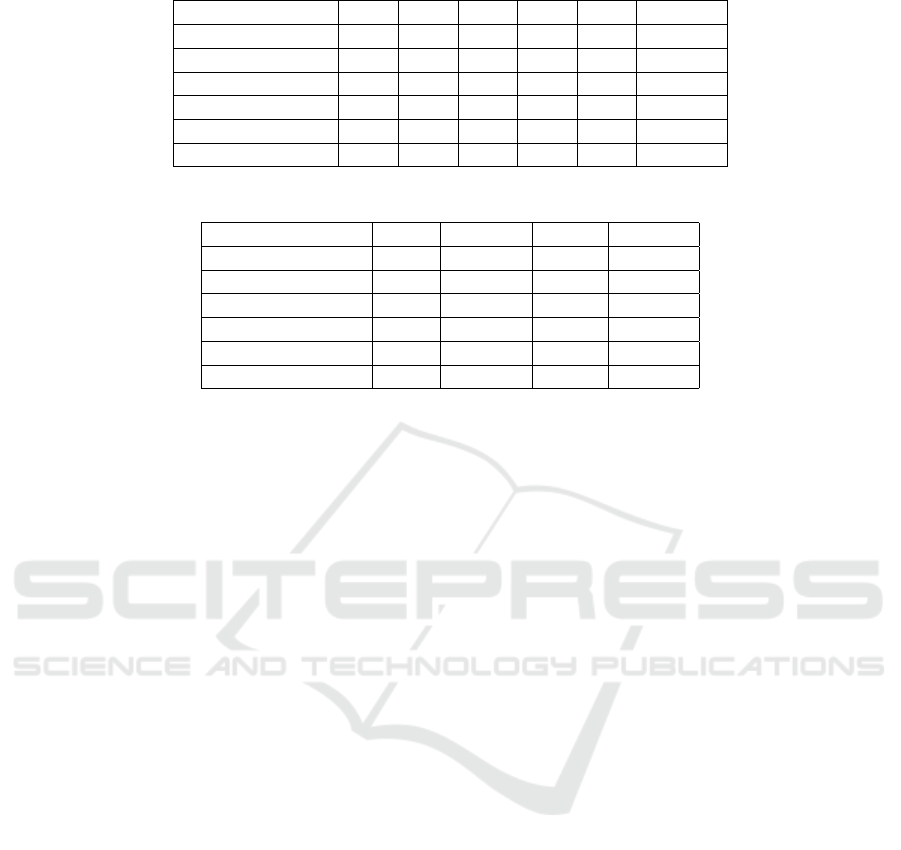
Table 1: Classification accuracy (in percentages) of unseen garment shapes.
Feature Extractor P SH SW TW TS Average
AlexNet(depth) 57.0 13.0 71.0 47.0 50.0 47.6
AlexNet(RGB) 18.0 13.0 0.0 0.0 0.0 6.2
VGG16(depth) 25.0 18.0 35.0 20.0 25.0 24.6
VGG16(RGB) 9.0 14.0 20.0 7.0 11.0 12.2
ResNet18(depth) 6.0 10.0 51.0 69.0 5.0 28.2
ResNet18(RGB) 16.0 1.0 2.0 81.0 14.0 22.8
Table 2: Classification accuracy of unseen garment weights.
Feature Extractor Light Medium Heavy Average
AlexNet (depth) 72.0 18.0 55.0 48.3
AlexNet (RGB) 82.0 14.0 7.0 34.3
VGG16 (depth) 40.0 48.0 31.0 39.7
VGG16 (RGB) 38.0 3.0 100.0 47
ResNet18 (depth) 51.0 6.0 47.0 34.7
ResNet18 (RGB) 41.0 5.0 10.0 18.7
unseen video sequences from our dataset, i.e. video
sequences that have not been used for training. For
this, we accumulate prediction results over the video
sequence and compute the Moving Average (MA)
over the evaluated sequence. That is, MA serves
as the decision-making mechanism that determines
the shape and weight classes after observing a gar-
ment deform over time rather than the previous three
frames as in previous sections.
This experiment consists of passing 3 consecutive
frames to the network to output a shape and weight
class probability for each output in the networks. We
then compute their MA values for each output before
sliding into the next three consecutive frames, e.g.
slide from frame t − 2, t − 1, t to frame t − 1, t, t +1.
After we slide across the video sequence and accu-
mulate MA values, we calculated an average of the
MA values for each class. We chose the class that ob-
serves the maximum MA value as a prediction of the
target category. Our unseen test set contains 50 video
sequences. Hence, we got 50 shape and weight pre-
dictions and used to calculate the confusion matrices
in Fig. 2 and Fig. 3.
From Fig. 2(left) and Fig. 3(left), it can been seen
that an average prediction accuracy of 48% for shapes
and an average prediction of 60% for weights have
been obtained for all unseen video sequences. We can
observe in Fig. 2(left) that the shirt has been wrongly
classified as a pant in all its video sequences, but the
sweater is labelled correctly in most of its sequences.
Half of the towels have been wrongly recognised as
a t-shirt. Also for weight, the medium-weighted gar-
ments are wrongly classified in all their sequences,
where most of them have been categorised as heavy
garments, but all heavy garments are correctly classi-
fied. Fig. 2 (right) shows an example of the MA over
a video sequence of a shirt. It can be seen that the net-
work changes its prediction between being a t-shirt
or a pant while the correct class is a shirt. The rea-
son for this is that the shirts, t-shirts and pants in our
dataset are made of cotton. Therefore, these garments
have similar physical properties, but different shapes
and our neural network is not capable of differentiat-
ing between these unseen garments, which suggests
that further manipulations are required to improve the
classification prediction. Fig. 3 (right) has suggested
that the network holds a prediction as ’heavy’ over a
medium-weight garment. This is because heavy gar-
ments are sweaters and differ from the rest of the
garments in terms of its materials. Therefore, our
network can classify heavy garments but has a low-
performance accuracy for shirts and pants.
As opposed to shapes, weights are a more implicit
physical property which are more difficult to be gen-
eralised. Nevertheless, the overall performance of the
network (48% for shapes and 60% for weights) sug-
gests that our continuous perception hypothesis holds
for garments with shapes such as pants, sweaters,
towels, and t-shirts and with weights such as light and
heavy, suggesting that further interactions with gar-
ments such as in (Willimon et al., 2011; Sun et al.,
2016) are required to improve the overall classifi-
cation performance. We must note that the over-
all shape classification performance while validating
our network is approximately 90%; suggesting that
the network can successfully predict known garment’s
shapes based on its dynamic properties.
Continuous Perception for Classifying Shapes and Weights of Garments for Robotic Vision Applications
353

Figure 2: Continuous shape prediction (Left: Moving Aver-
age Confusion Matrix; Right: Moving Average over a video
sequence).
Figure 3: Continuous weight prediction (Left: Moving Av-
erage Confusion Matrix; Right: Moving Average over a
video sequence).
5 CONCLUSIONS
From the ablation studies we have conducted, depth
images have a better performance over RGB images
because depth captures the garment topology prop-
erties of garments. That is, our network was able
to learn dynamic changes of the garments and make
predictions on unseen garments since depth images
have a prediction accuracy of 48% and 60% while
classifying shapes and weights, accordingly. We also
show that continuous perception improves classifica-
tion accuracy. That is, weight classification, which is
an indicator of garment physical properties, observes
an increase in accuracy from 48.3% to 60% under a
continous perception paradigm. This means that our
network can learn physical properties from continu-
ous perception. However, we observed an increase
of around 1% (from 47.6% to 48%) while continu-
ously classifying garment’s shape. The marginal im-
provement while continuously classifying shape in-
dicates that further manipulations, such as flattening
(Sun et al., 2015) and unfolding (Doumanoglou et al.,
2016) are required to bring a unknown garment to a
state that can be recognised by a robot. That is, the
ability to predict dynamic information of a piece of
an unknown garment (or other deformable objects) fa-
cilitates robots’ efficiency to manipulate it by ensur-
ing how the garment will deform (Jim
´
enez and Tor-
ras, 2020; Ganapathi et al., 2020). Therefore, an un-
derstanding of the dynamics of garments and other
deformable objects can allow robots to accomplish
grasping and manipulation tasks with higher dexter-
ity
From the results, we can also observe that there
exist incorrect classifications of unseen shirts be-
cause of their similarity in their materials. There-
fore, we propose to experiment on how to improve
prediction accuracy on garments with similar mate-
rials and structures by allowing a robot to interact
with garments as proposed in (Sun et al., 2016). We
also envisage that it can be possible to learn the dy-
namic physical properties (stiffness) of real garments
from training a ’physical-similarity network’ (Phys-
Net) (Runia et al., 2020) on simulated garment mod-
els.
REFERENCES
Bhat, K. S., Twigg, C. D., Hodgins, J. K., Khosla, P. K.,
Popovi
´
c, Z., and Seitz, S. M. (2003). Estimating cloth
simulation parameters from video. In Proceedings of
the 2003 ACM SIGGRAPH/Eurographics symposium
on Computer animation, pages 37–51. Eurographics
Association.
Bohg, J., Hausman, K., Sankaran, B., Brock, O., Kragic,
D., Schaal, S., and Sukhatme, G. S. (2017). Interac-
tive perception: Leveraging action in perception and
perception in action. IEEE Transactions on Robotics,
33(6):1273–1291.
Davis, A., Bouman, K. L., Chen, J. G., Rubinstein, M., Du-
rand, F., and Freeman, W. T. (2015). Visual vibrome-
try: Estimating material properties from small motion
in video. In Proceedings of the ieee conference on
computer vision and pattern recognition, pages 5335–
5343.
Doumanoglou, A., Stria, J., Peleka, G., Mariolis, I., Petrik,
V., Kargakos, A., Wagner, L., Hlav
´
a
ˇ
c, V., Kim, T.-
K., and Malassiotis, S. (2016). Folding clothes au-
tonomously: A complete pipeline. IEEE Transactions
on Robotics, 32(6):1461–1478.
Ganapathi, A., Sundaresan, P., Thananjeyan, B., Balakr-
ishna, A., Seita, D., Grannen, J., Hwang, M., Hoque,
R., Gonzalez, J. E., Jamali, N., Yamane, K., Iba, S.,
and Goldberg, K. (2020). Learning to smooth and fold
real fabric using dense object descriptors trained on
synthetic color images.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Jim
´
enez, P. and Torras, C. (2020). Perception of cloth in
assistive robotic manipulation tasks. Natural Comput-
ing, pages 1–23.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
354

networks. In Advances in neural information process-
ing systems, pages 1097–1105.
Li, Y., Lin, T., Yi, K., Bear, D., Yamins, D. L. K., Wu, J.,
Tenenbaum, J. B., and Torralba, A. (2020). Visual
grounding of learned physical models.
Li, Y., Wu, J., Tedrake, R., Tenenbaum, J. B., and Torralba,
A. (2018). Learning particle dynamics for manipulat-
ing rigid bodies, deformable objects, and fluids. arXiv
preprint arXiv:1810.01566.
Mariolis, I., Peleka, G., Kargakos, A., and Malassiotis, S.
(2015). Pose and category recognition of highly de-
formable objects using deep learning. In 2015 Inter-
national Conference on Advanced Robotics (ICAR),
pages 655–662. IEEE.
Mart
´
ınez, L., del Solar, J. R., Sun, L., Siebert, J. P., and
Aragon-Camarasa, G. (2019). Continuous perception
for deformable objects understanding. Robotics and
Autonomous Systems, 118:220 – 230.
Runia, T. F., Gavrilyuk, K., Snoek, C. G., and Smeulders,
A. W. (2020). Cloth in the wind: A case study of phys-
ical measurement through simulation. arXiv preprint
arXiv:2003.05065.
Sengupta, A., Lagneau, R., Krupa, A., Marchand, E.,
and Marchal, M. (2020). Simultaneous tracking
and elasticity parameter estimation of deformable ob-
jects. In IEEE Int. Conf. on Robotics and Automation,
ICRA’20.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Sun, L., Aragon-Camarasa, G., Rogers, S., and Siebert,
J. P. (2015). Accurate garment surface analysis using
an active stereo robot head with application to dual-
arm flattening. In 2015 IEEE international conference
on robotics and automation (ICRA), pages 185–192.
IEEE.
Sun, L., Aragon-Camarasa, G., Rogers, S., Stolkin, R., and
Siebert, J. P. (2017). Single-shot clothing category
recognition in free-configurations with application to
autonomous clothes sorting.
Sun, L., Rogers, S., Aragon-Camarasa, G., and Siebert,
J. P. (2016). Recognising the clothing categories from
free-configuration using gaussian-process-based inter-
active perception. In 2016 IEEE International Con-
ference on Robotics and Automation (ICRA), pages
2464–2470.
Tanaka, D., Tsuda, S., and Yamazaki, K. (2019). A learn-
ing method of dual-arm manipulation for cloth folding
using physics simulator. In 2019 IEEE International
Conference on Mechatronics and Automation (ICMA),
pages 756–762. IEEE.
Willimon, B., Birchfield, S., and Walker, I. (2011). Clas-
sification of clothing using interactive perception. In
2011 IEEE International Conference on Robotics and
Automation, pages 1862–1868.
Yang, S., Liang, J., and Lin, M. C. (2017). Learning-based
cloth material recovery from video. In Proceedings of
the IEEE International Conference on Computer Vi-
sion, pages 4383–4393.
Continuous Perception for Classifying Shapes and Weights of Garments for Robotic Vision Applications
355
