
Tracking 3D Deformable Objects in Real Time
Tiago Silva
1
, Luís Magalhães
1
, Manuel Ferreira
2
, Salik Ram Khanal
2
and Jorge Silva
2
1
Centro ALGORITMI, University of Minho, Guimarães, Portugal
2
Neadvance, Braga, Portugal
Keywords: Deep Learning, 3D Tracking, Deformable Objects, RGB-D Data, Object Segmentation.
Abstract: 3D object tracking is a topic that has been widely studied for several years. Although there are already several
robust solutions for tracking rigid objects, when it comes to deformable objects the problem increases in
complexity. In recent years, there has been an increase in the use of Machine / Deep Learning techniques to
solve problems in computer vision, including 3D object tracking. On the other hand, several low-cost devices
(like Kinect) have appeared that allow obtaining RGB-D images, which, in addition to colour information,
contain depth information. In this paper is proposed a 3D tracking approach for deformable objects that use
Machine / Deep Learning techniques and have RGB-D images as input. Furthermore, our approach
implements a tracking algorithm, increasing the object segmentation performance towards real time. Our tests
were performed on a dataset acquired by ourselves and have obtained satisfactory results for the segmentation
of the deformable object.
1 INTRODUCTION
The problems regarding 3D Tracking on deformable
objects are challenging and only recently some
research work has been done on the subject.
Regarding tracking objects topic, the research work is
quite extensive, but relatively to deformable objects
there are only a few because its difficulty increases
considerably(Hu et al., 2019). Recently, low-cost
devices (like Kinect) have emerged that allow
obtaining RGB-D images, which, in addition to color
information, contain depth information. The
possibility of obtaining depth information can be an
added value in carrying out tracking of deformable
objects because, unlike rigid objects, deformable
objects change shape according to their manipulation,
making it difficult to carry out. To deal with this
problem, machine learning techniques may be used,
specifically deep learning, which are more robust in
conjunction with the object's depth information,
increasing its precision(Song & Xiao, 2013).
Furthermore, the 3D Tracking of deformable objects
will necessarily have to be performed in real time,
raising problems such as error tolerance or
computational cost, since the speed of the process
becomes essential for its development.
The 3D Tracking increases the complexity of the
tracking task because the level of information to be
calculated is higher. Nevertheless, it has been studied
recently by researchers for deformable objects
because the depth information helps in the deform-
able object tracking.
By using the depth information it is possible to
obtain the object information in three dimensions and
with this, the Artificial Intelligence model manages to
obtain a better perception of the object, with superior
results, compared to a system with only the color
information (RGB)(Lai et al., 2011).
Object segmentation using CNNs has been
investigated in several studies and often segmentation
and tracking are performed simultaneously. Wang et
al. (2018) created a method named “SiamMask” that
improves the offline training procedure of popular
approaches to track objects. The ”SiamMask”
algorithm is quite popular when we want to use the
tracking and segmentation approach simultaneously.
Furthermore, its greatest feature is its high velocity,
where it obtained the highest velocity for objects
segmentation in video, in the DAVIS-2016 (Perazzi
et al., 2016) and DAVIS-2017 (Pont-Tuset et al.,
2018) competition. Its accuracy is also quite
competitive compared to other tracking algorithms.
Voigtlaender et al. (2019) created the algorithm
"TrackR-CNN" which is able to track multiple
objects, contrary to the previous algorithm”
SiamMask”, which is exclusive for cases of tracking
Silva, T., Magalhães, L., Ferreira, M., Khanal, S. and Silva, J.
Tracking 3D Deformable Objects in Real Time.
DOI: 10.5220/0010806700003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
823-830
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
823

only one object. Although it was created only as a
basis for the Multi Object Tracking and Segmentation
(MOTS) challenge (Voigtlaender et al., 2019), its
performance proved to be really effective for the
tracking and segmentation process.
Ronneberger et al. (2015) created a Deep
Learning architecture called "U-Net". U-Net has been
studied a lot due to its success for image
segmentation. The architecture receives a RGB image
and returns the binary segmentation of the intended
image. The U-NET model architecture consists of
using a contracting path and an expansive path
through CNN ́s. The contracting path consists of a
typical CNN ́s architecture. In the expansive path, the
reverse path is performed, where the output is the
binary segmentation of the provided image. The U-
NET architecture has been widely used recently due
to its low computational cost and the fact that there
is not needed to provide many examples for the model
successfully identify the object. Thus, the U-NET
architecture proved to be an excellent candidate for
creating binary object segmentation. Furthermore,
Ronneberger et al. (2015) won the ISBI cell tracking
challenge 2015, one of the main competitions for
evaluating segmentation and tracking models in
medical images, thus showing the success of their
architecture.
Many studies have been carried out to
demonstrate the importance of CNNs in object
segmentation. Almost all studies use only RGB
images, but recently, approaches have emerged where
CNNs also receive depth information to segment the
intended object. Liu et al. (2019) presented two
approaches to train RGB-D data with CNNs: The first
approach is to create two models where RGB data and
depth data are trained separately, and the second
approach is to create only one trained model with
RGB images and depth data. In the first approach, the
same importance is given to RGB data and depth data,
in the second approach, greater importance is given to
RGB data (Liu et al., 2019).
This paper presents a new approach for 3D
tracking of deformable objects that uses a deep
learning model and RGB-D data as input. The
approach was designed and planned aiming real time
performance. The approach was tested and evaluated
using a dataset built specifically for this purpose.
The rest of the paper is structured as follows: In
the second section, we describe our method. In the
third section presents our results and discusses the
main conclusions of this study. The fourth section
concludes the article.
2 PROPOSED APPROACH
This section presents a solution for performing
automatic tracking of deformable objects, using
Computer Vision algorithms and methods developed
specifically for this problem. The development of this
solution involves the detection of the deformable
object and monitoring its movement over time. Since
they were used supervised machine learning/deep
learning algorithms, the tracking process is done in
two stages: Offline Process (data processing and
model training) and Online Process (tracking of the
deformable object in real time).
2.1 Offline Process
The offline process (Figure 1) contains the steps
necessary to train the models to be used in the tracking
algorithm. In an initial step it is necessary to process
the data received. It is important to analyse the data
provided and divide it into two groups: RGB Data and
Depth Data. The two types of data are treated separ-
ately and the techniques used in the depth data do not
necessarily have to be used in RGB data and vice versa.
In the end, there will be only one model that
receives two images (RGB and Depth) and returns an
image with the binary segmentation of the intended
object. With this architecture it is possible to use the
information of Depth data and RGB data
simultaneously. Liu et al. (2019) two-model approach
was chosen because the depth information is
important for the tracking algorithm to understand the
shape of the object and, with this architecture, the
depth information will have the same importance as
the RGB information.
Figure 1: Offline Process.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
824
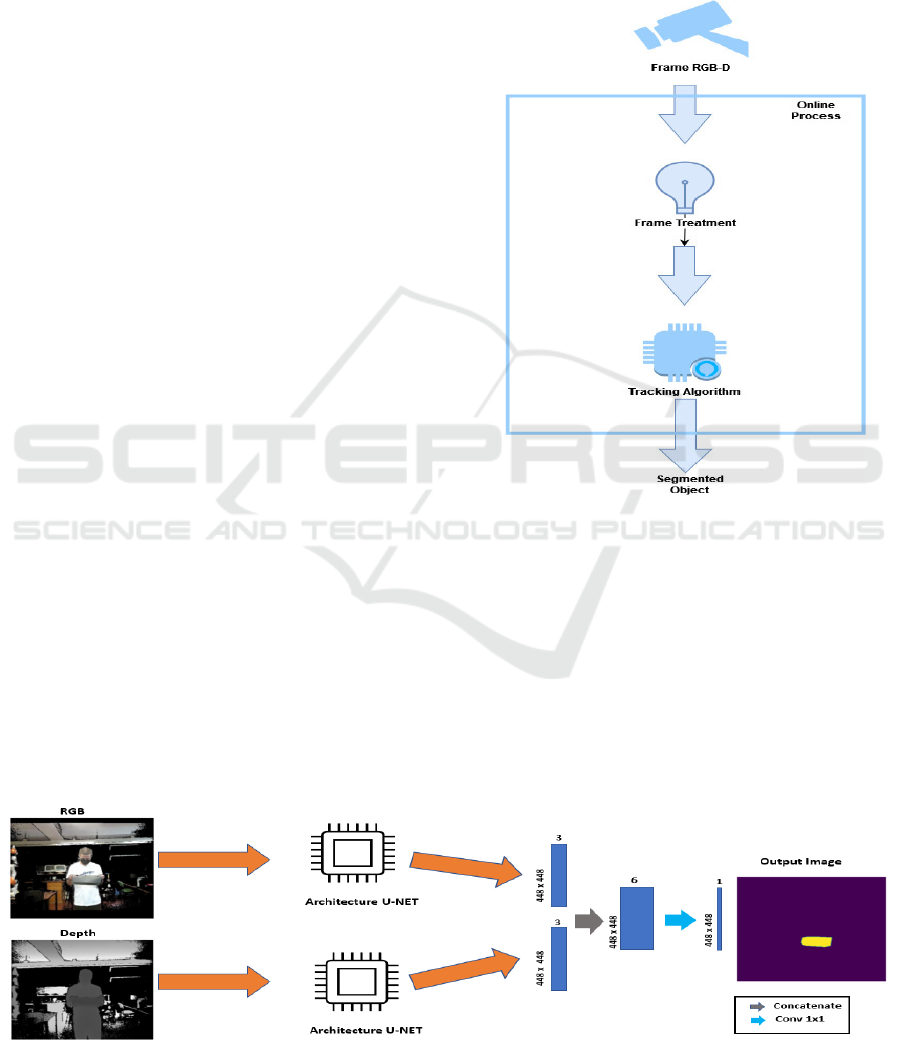
For the construction of the model, the U-NET
(Ronneberger et al., 2015) architecture was used. It
was necessary to perform some optimization of the
hyperparameters such as the input size. The model
receives two groups of data as input: RGB data and
Depth data. For each of the groups, a U-Net
architecture is built that outputs a layer with a 448 x
448 x 3 format size. After that, it is necessary to
perform a concatenate operation that transforms the
two outputs into just one layer with a 448 x 448 x 6
format size (with this operation it is possible to use
the information from both groups to predict the
deformable object). In the end, a Conv 1 x1 is applied
that transforms the output into a 448 x 448 x 1 image,
as shown in Figure 2.
2.2 Online Process
The Online Process (Figure 3) will contain the
necessary steps to track the deformable object. In an
initial phase it is necessary to apply some pre-
processing techniques to the frame received. RGB
and depth data are processed separately and are
applied the same pre-processing techniques that were
used in the Offline Process. It is important that the
frame format is identical to the images trained by the
model, that is, the same input size and use the same
data pre-processing techniques. In this way, the
results will increase considerably. After pre-
processing the RGB-D frame, it is necessary to use
the tracking algorithm and locate the deformable
object. This process is repeated for all frames.
The Tracking Algorithm aims to perform the
target object segmentation in a fast and efficient way.
In contrast to object detection that predicts on all
frames and all frames are independent of each other.
The developed Tracking Algorithm uses information
from previous frames to perform the deformable
object’s segmentation more quickly. As the objective
is to use the system in real time, the processing
velocity is a fundamental point, which is the main
reason for using a tracking approach in detriment of
object detection. The Tracking Algorithm receives as
input the current RGB-D frame and outputs the
segmented object and the coordinates of the
corresponding Bounding Box. This way, the system
will be able to perform the segmentation of the
deformable object and follow the object's movement
in the next frames.
Figure 2: Online Process.
For the construction of the Algorithm, it was
necessary to create two prediction models: Model
capable of segmenting the object in a full image
and Model capable of segmenting the object only
in the Bounding Box. The model capable of
segmenting the object in a full image will have the
same functionality as a Segmentation model in object
detection. The model does not receive any
information regarding the previous frames and
performs the prediction in the complete frame. In the
Figure 3: Model RGB-D.
Tracking 3D Deformable Objects in Real Time
825
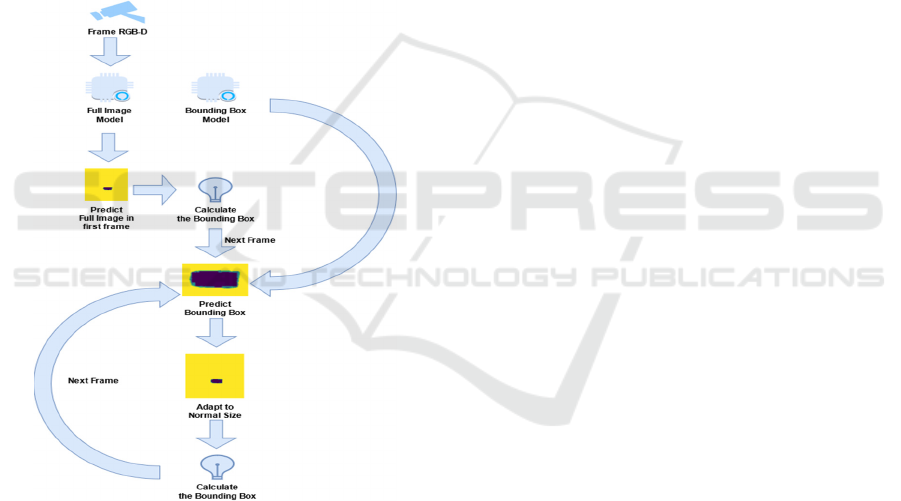
end, the model will provide two pieces of
information: The complete image with the segmented
object and the Bounding Box corresponding to the
object's location. This model will only be used in the
first frame because it is not yet known where the
object is in the image, and it is necessary to calculate
its initial location. The coordinates of the Bounding
Box, corresponding to the target object, are given to
the next frame. The next frames always receive the
coordinates of the Bounding Box of the previous
frame and, thus, the model capable of segmenting the
object only in the Bounding Box will always be used
for those frames. In the end, this model will have to
provide two pieces of information: Object
segmentation coordinates having as reference the
Bounding Box of the previous frame and update the
coordinates of the Bounding Box for the current
frame.
Figure 4: Tracking Algorithm.
Since the object’s speed is not too high, the
object's location in the previous frame is practically
the same as the object's location in the current frame.
For this reason, it is possible to use the coordinates of
the Bounding Box in the previous frame to locate the
object in the current frame. The Tracking Algorithm
segments the object only in the Bounding Box, which,
computationally, is essential to reduce the frame size
supplied to the predict model and, in this way,
increase the system response time.
In addition, it is also possible to perform the
prediction, in the full image, for certain frames,
balancing the tracking quality and processing
velocity. This strategy can be used in situations in
which the object moves very fast, preventing the
object from getting lost. In Figure 4, the Tracking
Algorithm schematic is presented.
3 RESULTS AND DISCUSSION
In all tests it was decided to use the U-NET
architecture because it obtains better results and
converges faster than the implementation of CNN's
from scratch. All hyperparameters were similar in all
tests to obtain the results with maximum precision.
We used Adam as the optimizer (Kingma & Ba,
2017), and a Learning Rate of 0.0004 on all tests. In
the Full Image Model, all images were resized to
448x448 pixels and in the Bounding Box Model all
images were resized to 128x128 pixels. Furthermore,
before the training process, all images were
normalized. All results presented by the models are
related to test datasets to verify the Model's
performance against unfamiliar images. The
algorithm was implemented using Python
programming language and open-source libraries
such as OpenCV, Tensorflow, Numpy, among others.
To optimize the processing time, part of the
implemented algorithms and methods were executed
on a graphics card, using the parallel computing
platform CUDA (Compute Unified Device
Architecture) and an NVIDIA GeForce RTX 3060
6GB GDDR6 graphics card was used for the training
phase.
3.1 Dataset
Data acquisition was obtained in the robotics
laboratories at the University of Minho, using a
Kinect 1.0 camera where, in addition to the RGB
image, it is possible to obtain the depth matrix. The
videos were recorded from 6 different points of view
to increase the diversity of the dataset, thus
transforming it into a more robust dataset. In addition,
some videos were made with two different type of
movements for detecting leather defects: Movements
Type 1 Dataset and Movements Type 2 Dataset. In
the Movements Type 1 Dataset, videos were recorded
while more smooth movements are performed. In the
Movements Type 2 Dataset, videos were recorded
while the leather suffers an undulatory movement. In
Table 1, it is shown the original size of the two
Datasets.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
826

Table 1: Size of Movements type 1 Dataset and Movements
type 2 Dataset.
Dataset RGB Data Depth Data Total
Movements
Type 1
11549 11549 23098
Movements
Type 2
6096 6096 12192
For the training and evaluation of the model, 1765
annotations were made, 1155 in the Movements Type
1 Dataset and 610 in the Movements Type 2 Dataset.
An image was chosen every 10 frames for both
datasets to be annotated. To carry out the annotations,
Labelme (Russell et al., 2008) was used, which is an
open-source tool for graphical annotations of images.
Kinect, for each captured frame, provides three
pieces of information: RGB image in 1920x1080
pixels format, RGB image in 512x424 pixels format,
Depth matrix in 512x424 format. As it is intended to
use the depth information and synchronize it with the
RGB image, it was decided to use the RGB images
that are in the same format and discard the images in
1920x1080 pixels format.
Both training datasets were divided into 70% for
training, 15% for validation and 15% for testing. In
addition, all images have been resized to 448 x 448
pixels and normalized to a 0-1 scale. The file
extension of the RGB images is .jpg and the depth
array is in the format .npy (numpy array).
3.2 Testing Models with Data Shuffle
This section presents the results of the Deep Learning
Models in the Test Datasets, in which data shuffle
was performed. In this way, the Models will be
evaluated as usual. The purpose of performing these
tests is to compare the results of using the model with
the depth images to the ones with only RGB images,
in different situations, to verify if the depth
information is important for the leather segmentation
or not.
For the Full Image Model training, the number of
epochs varied between 40 and 60 depending on the
situation, the training was carried out with the GPU
and the time needed was about half an hour for each
test. All results can be seen in Table 2.
Comparing the results of the models in the
Movements Type 1 Dataset, the depth information
does not improve the results, and the model with only
the RGB information, presents better results. It is
important to emphasize that both models segment the
deformable object with a high IoU (Intersect over
Union). Regarding the Movements Type2 Dataset,
the depth data improved the Deep Learning Model
although the difference between the results is not
significant, where the Model with only RGB
information has a Dice Loss of 0.1312 and the Model
with RGB-D information has a Dice Loss of 0.1192.
Table 2: Test Results with Full Image Model.
Dataset Dice Loss IoU Recall Precision
RGB Movement
T
yp
e 1 Dataset
0.0481 0.9117 0.9221 0.9849
RGB-D Movement
Type 1 Dataset
0.0727 0.8793 0.9011 0.9826
RGB Movement
Type 2 Dataset
0.1312 0.7810 0.8174 0.9712
RGB-D Movement
T
yp
e 2 Dataset
0.1192 0.7933 0.8435 0.9583
RGB Both
Datasets
0.1101 0.8128 0.9474 0.8961
RGB-D Both
Datasets
0.0717 0.8761 0.9289 0.9760
When both Datasets are joined, the images with
both movements are evaluated and the intention is to
compare the results with a more robust dataset. With
the increase of data, it is possible to verify that the
depth information has a greater importance for the
Deep Learning Model and the difference is
significant. In Table 2, it is possible to see that the
value of Dice Loss with only RGB data is 0.1101 and
with RGB-D data is 0.0717.
It is possible to conclude that, when the data
shuffle is performed, the Full Image Model presents
better results with the depth information according to
the robustness of the Dataset. If the Dataset has few
images, the depth information does not have a big
impact on the deformable object segmentation.
Table 3: Test Results with Bounding Box Model.
Dataset Dice Loss IoU Recall Precision
RGB Movement
Type 1 Dataset
0.1966 0.7286 0.8697 0.8621
RGB-D Movement
T
yp
e 1 Dataset
0.1553 0.8022 0.8531 0.9763
RGB Movement
Type 2 Dataset
0.3488 0.5378 0.6156 0.8905
RGB-D Movement
Type 2 Dataset
0.3576 0.5445 0.5891 0.9398
RGB Both
Datasets
0.2732 0.6023 0.7128 0.7930
RGB-D Both
Datasets
0.1991 0.7008 0.7761 0.9043
For the Bounding Box Model, the same tests were
performed but this time, using the necessary Model to
perform the Tracking Algorithm. The results can be
seen in Table 3.
Tracking 3D Deformable Objects in Real Time
827

Regarding Datasets Movements Type 1 and Type
2, both models presented equivalent results, but in
both situations the Models with only RGB
information presented better results. In the Dataset
Movements Type 2, the difference in results is
practically null and it is not possible to verify their
difference in the predict images.
Regarding the results when both Datasets are
merged, the depth information did not show any
impact on the tracking of the deformable object, being
that the value of Dice Loss when only RGB
information is used is 0.0769 and the value of Dice
Loss when it is RGB-D information used is 0.1656.
The fact that the depth information does not show any
impact on the Bounding Box Model in many
situations show that, when images are small, the
depth information is not important for Leather
Tracking.
3.3 Testing Models with a New Point of
View
In this section, are presented the results of the models
when it is necessary to predict a new point of view
that had never been presented in the training phase.
The purpose of performing these tests is to verify the
generalization level that the proposed Models can
achieve.
For the Full Image Model training, the number of
epochs varied between 40 and 45 depending on the
situation, the training was carried out with the GPU
and the time needed was about half an hour for each
test. All results can be seen in Table 4.
In the first test, only the Movement Type 1
Dataset was used and the results with RGB-D
information are better compared to the model with
only RGB images. The Model with RGB-D
information has a Dice Loss of 0.1553 while the
Model with only RGB information has a loss of
0.1966.
In general, the leather segmentation is more
complicated in the Movement Type 2 Dataset because
it presents more articulated movements of the leather,
making leather segmentation results difficult.
Regarding RGB and RGB-D data comparison, the
best results are obtained by the model with only RGB
information. The model with RGB information has a
dice loss of 0.3488 and the model with RGB-D
information has a dice loss of 0.3576.
Table 4: Test Results with Full Image Model.
Dataset Dice Loss IoU Recall Precision
RGB Movement
T
yp
e 1 Dataset
0.0412 0.9216 0.8015 0.9877
RGB-D Movement
Type 1 Dataset
0.0546 0.9007 0.7656 0.9913
RGB Movement
Type 2 Dataset
0.1303 0.7859 0.5465 0.9837
RGB-D Movement
T
yp
e 2 Dataset
0.1308 0.7837 0.5438 0.9892
RGB Both
Datasets
0.0769 0.8645 0.7203 0.9898
RGB-D Both
Datasets
0.1656 0.7535 0.6411 0.9895
In the end, it was decided to create a model with
information from both datasets (Movement Type 1
Dataset and Movement Type 2 Dataset). The Model
are evaluated with the Movement Type 2 Dataset,
presented in Table 4. Since the purpose of creating
this model was to improve the Movement Type 2
Dataset results, as it is the most complex Dataset for
leather segmentation. As the model trained in the
Movement Type 2 Dataset and the model in Both
Dataset were tested with the same images, it is
possible to compare the results between them.
It is easy to verify that the model with both
datasets presents better results indicating that if the
model trains with different types of leather and
different movements, it helps in its segmentation.
Another important factor to highlight is that the
model with RGB-D information has a much higher
performance compared to the model with only RGB
information. The reason for the Movement Type 2
Dataset to have superior results with only RGB
information may be related to the fact that the
Movement Type 2 Dataset has less images, 610, and
only 70% of them were used for training. When more
images are used for training (as in the case of the Both
Datasets Model) the results were superior with the
depth information indicating that it is important for
Figure 5: Example of a predict with Full Image Model.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
828

the leather segmentation, but more images are needed
for the training process. In Figure 5 you can see an
example of a forecast with the Full Image Model.
In general, depth information is important for
leather segmentation when using the Full Image
Model. After the tests were carried out on the Full
Image Model, the same tests were carried out but, this
time, referring to the Bounding Box Model to verify
or not the importance of depth information in small
images, such as in the Bounding Box case.
For the Bounding Box Model training, the number
of epochs varied between 40 and 60 depending on the
situation, the training was carried out with the GPU
and the time needed was about half an hour for each
test. All results can be seen in Table 5.
In the first test with the Bounding Box Model, it is
possible to verify that, in the Movement Type 1
Dataset, the Model presents better results when RGB-
D information is used instead of RGB information, but
the results are quite similar. The dice loss with RGB-D
information is 0.1599 and only with RGB information
is 0.1727. In relation to the Movement Type 2 Dataset,
the depth information has no relevance for its
prediction and, as in the Movement Type 1 Dataset, the
results are quite similar between them. It is interesting
to verify that, contrary to the Full Image Model which
presented much better results in the Movement Type 1
Dataset in relation to the Movement Type 2 Dataset, in
the Model Bounding Box the results are better in the
Movement Type 2 Dataset. This fact is since because
as this is the Bounding box model, the images it
predicts are approximations of Leather and, due to this
fact, there is no difference in results between datasets
because both are similar.
Finally, the model that trains with both datasets
also shows better results when it is only trained with
RGB information. It is possible to see that the model
with only RGB information has a Dice Loss of 0.1272
and with RGB-D information it has a Dice Loss of
0.1628. In Figure 6 it is presented an example of a
prediction using the Full Image Model. It is possible
to conclude that, when we have the complete image
and a larger amount of data, the depth information is
useful for leather segmentation, as is the case with the
Full Image Model. When we have few images or the
images are very small, the depth information is not
useful, as in the case of Bounding Box Model.
Table 5: Test Results with Bounding Box Model.
Dataset Dice Loss IoU Recall Precision
RGB Movement
T
yp
e 1 Dataset
0.1727 0.7681 0.6702 0.9859
RGB-D Movement
T
yp
e 1 Dataset
0.1599 0.7845 0.6864 0.9855
RGB Movement
Type 2 Dataset
0.1226 0.7876 0.6350 0.9640
RGB-D Movement
T
yp
e 2 Dataset
0.1411 0.7623 0.6167 0.9715
RGB Both
Datasets
0.1272 0.7813 0.6151 0.9694
RGB-D Both
Datasets
0.1628 0.7288 0.5499 0.9794
Comparing the results of section 3.2 and this
section, it is possible to verify that the results of the
section 3.2 are better due to the fact that the models
were trained with all points of view, but the purpose
of this section is to demonstrate that the Model, even
if it is never trained with a specific point of view, can
obtain good results.
3.4 Tracking Algorithm Speed
The purpose of this section is to compare the
performance of the proposed approach when the
Tracking Algorithm is or not used and when the GPU
is or not used.
Table 6: Tracking Algorithm performance.
Input Data
Without
Tracking
Algorithm
With
Tracking
Algorithm
GPU
RGB 4 FPS 10 FPS No
RGB-D 3 FPS 8/9 FPS No
RGB 11/12 FPS 13 FPS Yes
RGB-D 10 FPS 13 FPS Yes
As can be seen in Table 6, when the CPU is used,
the Tracking Algorithm has a big impact on the FPS
value, without the Tracking Algorithm the FPS values
are between 3/4 and with the Tracking Algorithm the
FPS values are between 9/10 and the use of the
Figure 6: Example of a predict with Bounding Box Model.
Tracking 3D Deformable Objects in Real Time
829

Tracking Algorithm is beneficial either with RGB-D
information or just with RGB information. When
using the GPU, the impact of the Tracking Algorithm
is less, but in both situations, it is beneficial to use the
Tracking Algorithm.
It is important to emphasize that, using the
Tracking Algorithm and the GPU, the depth
information has no impact on the leather
segmentation velocity. The FPS results were
calculated with the models performing the prediction
in all frames and, when it is necessary to increase the
tracking velocity, the prediction does not need to be
performed in all frames, increasing the FPS.
4 CONCLUSIONS
Using a U-NET architecture for the Deep Learning
model helped us to get better results compared to
creating an architecture from scratch. In addition to
not having to train for many epochs, the results are
also satisfactory.(Ronneberger et al., 2015)
In general, the depth information is important for
the Deep Learning Model when it is intended to
segment a deformable object, but it is necessary to
pay attention to the dataset size. With a larger dataset
the depth information has more impact, but if the
dataset is small or the images have low resolution, the
depth information is not so useful for the Deep
Learning Model.
The Tracking Algorithm proved to be useful to
increase the system's processing velocity, in this way,
it is possible to increase the number of FPS and
manage to track the Leather in the same way.
However, it is necessary to pay attention to situations
in which the Bounding Box Model loses the object.
To prevent this situation, it is possible to create an
architecture that, in some situations, uses the Full
Image Model to guarantee the correct location of the
Leather.
For future work it is important to increase the
dataset size and include different types of Leather.
This way, the depth information will have a greater
impact on the Models. In addition, it is possible to add
more data processing steps, but it is necessary to pay
attention to the impact of each technique on the
system as it will have to work in real time.
ACKNOWLEDGEMENTS
This work is supported by: European Structural
and Investment Funds in the FEDER component,
through the Operational Competitiveness and
Internationalization Programme (COMPETE 2020)
[Project nº 42778; Funding Reference: POCI-01-
0247-FEDER-042778].
REFERENCES
Hu, Z., Han, T., Sun, P., Pan, J., & Manocha, D. (2019). 3-
D Deformable Object Manipulation Using Deep Neural
Networks. IEEE Robotics and Automation Letters,
4(4), 4255–4261. https://doi.org/10.1109/LRA.2019.2
930476
Kingma, D. P., & Ba, J. (2017). Adam: A Method for
Stochastic Optimization. ArXiv:1412.6980 [Cs].
http://arxiv.org/abs/1412.6980
Lai, K., Bo, L., Ren, X., & Fox, D. (2011). A large-scale
hierarchical multi-view RGB-D object dataset. 2011
IEEE International Conference on Robotics and
Automation, 1817–1824. https://doi.org/10.1109/
ICRA.2011.5980382
Liu, Z., Shi, S., Duan, Q., Zhang, W., & Zhao, P. (2019).
Salient object detection for RGB-D image by single
stream recurrent convolution neural network.
Neurocomputing, 363, 46–57. https://doi.org/10.1016/
j.neucom.2019.07.012
Perazzi, F., Pont-Tuset, J., McWilliams, B., Van Gool, L.,
Gross, M., & Sorkine-Hornung, A. (2016). A
Benchmark Dataset and Evaluation Methodology for
Video Object Segmentation. 2016 IEEE Conference on
Computer Vision and Pattern Recognition (CVPR),
724–732. https://doi.org/10.1109/CVPR.2016.85
Pont-Tuset, J., Perazzi, F., Caelles, S., Arbeláez, P.,
Sorkine-Hornung, A., & Van Gool, L. (2018). The 2017
DAVIS Challenge on Video Object Segmentation.
ArXiv:1704.00675 [Cs]. http://arxiv.org/abs/1704.00
675
Ronneberger, O., Fischer, P., & Brox, T. (2015). U-Net:
Convolutional Networks for Biomedical Image
Segmentation. ArXiv:1505.04597 [Cs]. http://arxiv.
org/abs/1505.04597
Russell, B. C., Torralba, A., Murphy, K. P., & Freeman, W.
T. (2008). LabelMe: A Database and Web-Based Tool
for Image Annotation. International Journal of
Computer Vision, 77(1–3), 157–173. https://doi.org/
10.1007/s11263-007-0090-8
Song, S., & Xiao, J. (2013). Tracking Revisited Using
RGBD Camera: Unified Benchmark and Baselines.
2013 IEEE International Conference on Computer
Vision, 233–240. https://doi.org/10.1109/ICCV.20
13.36
Voigtlaender, P., Krause, M., Osep, A., Luiten, J., Sekar, B.
B. G., Geiger, A., & Leibe, B. (2019). MOTS: Multi-
Object Tracking and Segmentation. 2019 IEEE/CVF
Conference on Computer Vision and Pattern
Recognition (CVPR), 7934–7943. https://doi.org/
10.1109/CVPR.2019.00813
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
830
