
A VR Application for the Analysis of Human Responses to Collaborative
Robots
∗
Ricardo Matias and Paulo Menezes
University of Coimbra, Department of Electrical and Computer Engineering, Institute of Systems and Robotics,
Rua S
´
ılvio Lima, Coimbra, Portugal
Keywords:
Virtual Reality, Human-robot Collaboration, Baxter Robot.
Abstract:
The increasing number of robots performing certain tasks in our society, especially in the industrial environ-
ment, introduces more scenarios where a human must collaborate with a robot to achieve a common goal
which, in turn, raises the need to study how safe and natural this interaction is and how it can be improved.
Virtual reality is an excellent tool to simulate these interactions, as it allows the user to be fully immersed in
the world while being safe from a possible robot malfunction. In this work, a simulation was created to study
how effective virtual reality is in the studies of human-robot interaction. It is then used in an experiment where
the participants must collaborate with a simulated Baxter to place objects delivered by the robot in the correct
place, within a time limit. During the experiment, the electrodermal activity and heart rate of the participants
are measured, allowing for the analysis of reactions to events occurring within the simulation. At the end of
each experiment, participants fill a user experience questionnaire (UEQ) and a Flow Short Scale questionnaire
to evaluate their sense of presence and the interaction with the robot.
1 INTRODUCTION
Robots are gradually moving from highly controlled
environments, where they work autonomously and
alone, to new ones where the operations are done with
human presence to act jointly towards the same task.
These new types of robots are known as collaborative
robots (Knudsen and Kaivo-oja, 2020).
The industrial environments are good examples of
this situation, since a lot of tasks are automated, lead-
ing to large areas where robots operate alone, how-
ever, as referred by (Liu et al., 2019), in many cases
this still needs to be complemented by human man-
ual work. The assembly lines in the automotive and
electronic equipment industries are good examples of
these situations. Moreover, the repetitive nature of
these tasks can cause fatigue and frequently lead to
lower back pain situations or spine injuries (Kr
¨
uger
et al., 2009). Introducing a robot collaborator could
be an effective measure to help in fighting these prob-
lems.
Human-robot collaboration is still far from being
effective, and safe, as is the collaboration between hu-
mans. The International Federation of Robotics only
∗
This work was supported by Fundac¸
˜
ao para a Ci
ˆ
encia e
a Tecnologia (FCT) through project UID/EEA/00048/2020
allows robots and humans to work together if they
don’t share the same workspace or if they share it but
don’t act simultaneously. This is due to a major flaw
in current day robots, the lack of awareness of their
surroundings, in particular, of their partners’ actions
and feelings, which in turn, leads to the lack of abil-
ity to adapt accordingly. As noted by (C¸
¨
ur
¨
ukl
¨
u et al.,
2010), robots in the near future will need to react and
adapt to the working partner’s presence and actions.
Similarly to the case of operators controlling large
machines, awareness is a key issue for robots, in par-
ticular those that need a lot of strength and speed,
since one wrong move can seriously injure or even
kill someone in its vicinity. We may say that safety
implies strong awareness, but even a careful car driver
cannot always predict the next move of a distracted
pedestrian. Speed limitations in urban areas have the
purpose of reducing the number of (fatal) accidents
due to unpredictable human behaviours, the same
principle has been applied to collaborative robots.
The designation collaborative robots refers in most
cases to robots whose joint torque or force is reduced
to a level where a collision with a human will make
it stop while not causing any harm. Other cases are
based on turn-taking, frequently enforced by two lat-
eral buttons that the human must press simultaneously
68
Matias, R. and Menezes, P.
A VR Application for the Analysis of Human Responses to Collaborative Robots.
DOI: 10.5220/0010829600003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 1: GRAPP, pages
68-78
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

to ensure that his/her hands are not inside the robot
operating volume, while it is moving.
While being a new and interesting trend we may
say that this gathering may affect the performance
of both robots and humans. Robots have to oper-
ate slower and be less powerful to avoid fatal acci-
dents, humans may need to adapt to these new situa-
tions and this adaptation may require unexpected cog-
nitive and/or emotional efforts that eventually result in
a progressive degradation of their performance and/or
physical or mental health. It is therefore important
to understand what influence a specific collaborative
setup may have in humans, in particular along a work-
day period.
1.1 Related Works
Human-Robot interaction as a multidisciplinary field
emerged in the mid-1990s and early years of 2000.
It focuses on understanding the interactions between
robots and people and how they can be shaped and
improved. Over the years, robots have seen great im-
provement, with new models constantly making the
old ones obsolete with new hardware, cognitive capa-
bilities and more. The vision of this field is to make
robots exist in our everyday lives, from helping in the
industrial environment and household chores to social
robots that can entertain or care for humans. As such,
studies on this field focus not just on the short term in-
teractions in the laboratory but also the long-term in-
teractions with systems such as a robotic weight loss
coach (Kidd and Breazeal, 2008) that helps track calo-
ries consumption to combat obesity. The introduction
of this robot in the participants’ lives had them track-
ing their calories consumption and exercising almost
twice as long, demonstrating the benefits that robots
could have if correctly introduced in our lives. This
introduction also raises the importance of the robot’s
appearance. Facial expressions are a big part of how
the user perceives the robot. However, realistic fa-
cial expressions can be tough to achieve as humans
can intuitively understand when something looks un-
usual. Leaning more towards the cartoonish and sim-
plistic facial expressions could solve this issue. Sys-
tems such as KASPER (Blow et al., 2006) use this
idea in the design to approximate the facial expres-
sions without ultra-realism.
As mentioned previously, the growth of the HRI
field leads to an increase in the number of collabora-
tive robots being introduced in our society, which in
turn raises the need to study and improve the security
and efficiency of human-robot interactions. Several
works validate the use of VR to reach this goal for
different types of interactions, be it in handing over
and receiving objects from a robot partner (Duguleana
et al., 2011) or controlling a robot arm (de Giorgio
et al., 2017). Regarding the improvement of HRI
safety, different solutions are presented to this prob-
lem. Applications such as ”beWare of the Robot”
(Matsas and Vosniakos, 2017) tackle the safety issues
through ”emergencies” or warning signals in the form
of visual and auditive stimuli.
Instead of warning the user, another way to
tackle the safety issues is to adapt the robot’s move-
ments. This can be achieved through a ”digital twin”
environment, where the physical environment is di-
rectly transcribed to a digital one, allowing for part or
all of the logic to be in the digital environment. The
robot can then use this system to avoid the human or
even stop entirely (Maragkos et al., 2019).
The introduction of biological signals in HRI
can improve the quality of the interaction. For in-
stance, it can allow the user to control a robot using
a brain-machine interface (Bi et al., 2013) or allow
the robot to recognise the human’s mental state and
physical activities through sensors monitoring heart-
rate, muscle activity, brainwaves through EEG, nose
temperature and head movement (Al-Yacoub et al.,
2020).
In particular, electrodermal activity (EDA) is
one of the leading indicators of stress. There are
various techniques and open-source software that can
be used to analyse such signals (Lutin et al., 2021).
More recently, deep learning algorithms alongside the
”classical” statistical algorithms can be used to make
more complex analysis (Aqajari et al., 2020).
1.2 Contribution and Article Structure
The presented work proposes a solution to study a
human-robot collaboration scenario in Virtual Real-
ity. The presented solution consists of a simulated
environment that the user can visualize and interact
with via a head-mounted display (HMD). It explores
a ROS (Stanford Artificial Intelligence Laboratory et
al., 2020) Motion Planning, manipulation and con-
trol tool named MoveIt to animate a model of Baxter
robot to which the user interacts. The created sys-
tem is then explored in a pilot study to evaluate how
the participants react to distractions in their simulated
workplace, and how they feel about the interaction
with the robot.
This paper is organized as follows: section 2 de-
scribes the main goal of this work and the considera-
tions taken. The architecture and implementation of
the created system are presented in section 3. Sec-
tion 4 introduces the pilot study performed with the
system created and provides an assessment and dis-
A VR Application for the Analysis of Human Responses to Collaborative Robots
69
cussion on the outcome. Finally, section 5 concludes
the article.
2 VR FOR COLLABORATIVE
ROBOTS INTERACTION
ANALYSIS
The goal of this work is to create a system to study
human-robot interaction and use it to analyse how dis-
tractors may affect a human performing a collabora-
tive task with a robot. The system consists of a vir-
tual environment where the user interacts with a sim-
ulated Baxter robot, cooperating to complete simple
tasks. During these interactions, the user’s reactions
to the robot’s actions, such as posture and physiolog-
ical signals, namely, electrodermal activity, and elec-
trocardiogram are recorded to support the evaluation
of users’ reactions to the disturbing events purposely
added.
The use of Virtual Reality to study human-robot
collaboration has the clear advantage of providing
clean, repeatable and safe support to create counter-
parts of live experiences (Duguleana et al., 2011).
This is perfect for analysing how adequate an environ-
ment or an interactive system is for human use. Be-
sides safety, these approaches may have economical
advantages as they enable the validation of hypothe-
ses without risking any kind of material losses due to
inadequate usage, or do any type of predictive analy-
sis of what will be the outcome of the introduction of
a change, such as a collaborative robot, in a specific
point of the production process.
There is however the question of knowing if the
user behaviours in a VR-based environment are dif-
ferent from the ones in a real situation.
Although other factors may contribute to the mis-
match of the above, the immersion level and sense of
presence are two crucial aspects since the results ob-
tained in a VR-based test will not be accurate if a high
sense of immersion and presence is not achieved.
For this reason, it is necessary to evaluate these
factors as perceived by each user, along with the in-
teractive task under analysis, to enable the prediction
of the accuracy of the task-related parameters under
estimation. This is commonly done through the ap-
plication of self-response questionnaires such as UEQ
and flow short scale questionnaires and by evaluating
the user’s reactions, as will be analysed later.
Another important aspect to take into account is
the realism of the robots’ movements. To obtain
results comparable to real situations, the simulated
robot has to behave like a real one in a real environ-
ment. Whenever possible, the use of a controller that
mimics or matches as close as possible that of the real
robot will bring some guarantee that in what concerns
the perception of robot motions by the user will be
similar to the real case.
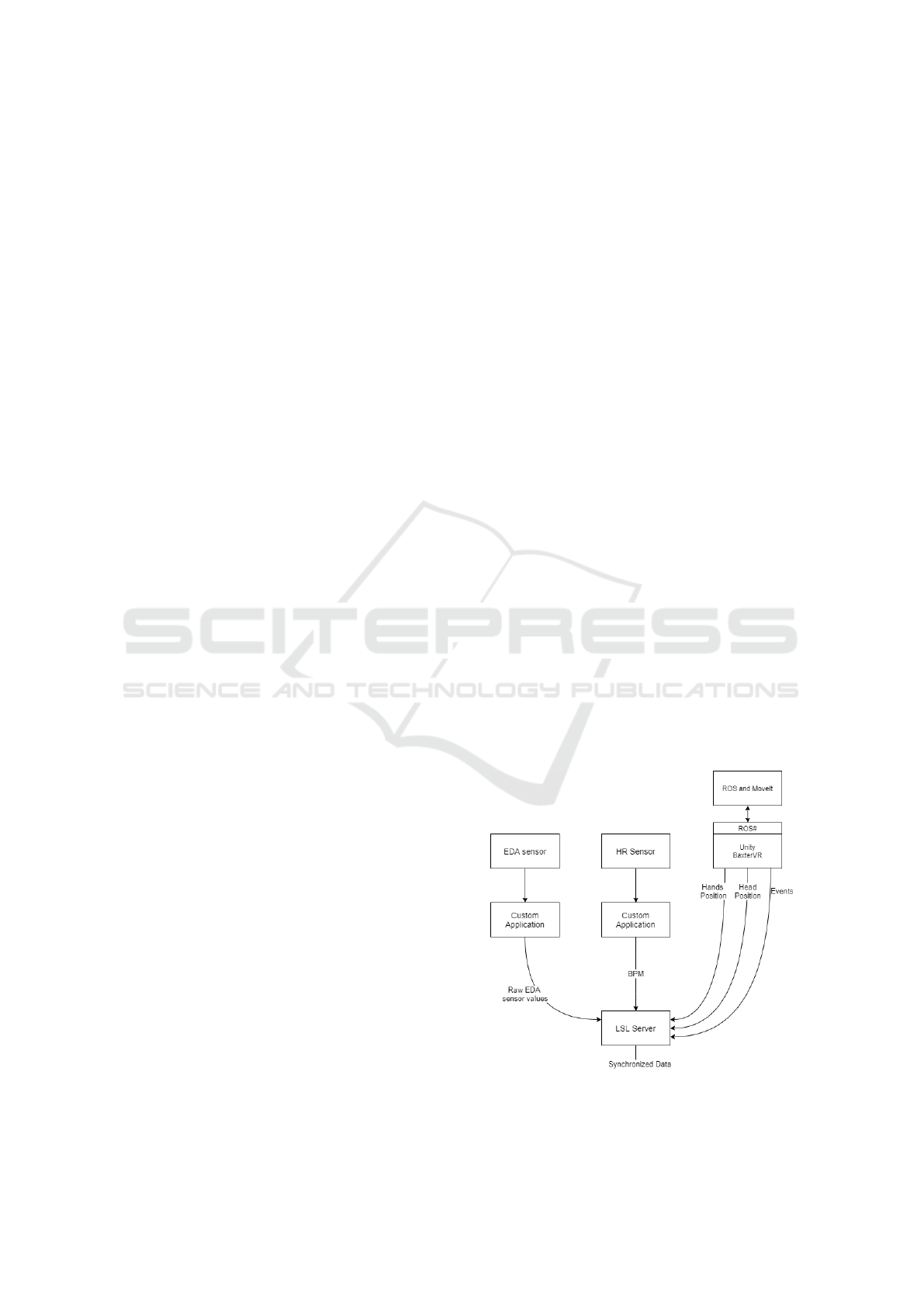
3 ARCHITECTURE,
IMPLEMENTATION AND
SCENARIO
The implementation of the above resulted in a sce-
nario around the Baxter robot supported by a modular
architecture (figure 1) composed of three main ele-
ments:
• The BaxterVR application developed on Unity™.
• MoveIt - a ROS-based motion planning and con-
troller for real robots.
• A data acquisition system developed over the Lab-
streaminglayer (LSL) (Swartz Center for Compu-
tational Neuroscience, 2021) framework.
The BaxterVR application allows the users to ex-
plore a collaborative robot scenario and interact with
it via a handheld controller, as will be described
later. This application communicates with MoveIt,
the robot planner and controller supported by a ROS
(Robot Operating System) connection. BaxterVR
also uses an LSL connection for enabling the syn-
chronous registration of the generated events and
biosignals such as GSR (galvanic skin response) and
heart rate, which are captured by two other applica-
tions that use the same protocol.
Figure 1: System architecture.
GRAPP 2022 - 17th International Conference on Computer Graphics Theory and Applications
70

3.1 Implementation
To handle the communications between BaxterVR
and MoveIt, a total of three ROS nodes were cre-
ated. Their purpose is to handle the robot joint an-
gles to BaxterVR, transmit information about the VR
objects, such as their positions, and orientations to
MoveIt, and handle requests to move the robot using
an action server.
BaxterVR publishes the necessary information
about the objects in the environment, such as position,
orientation and size to the corresponding ROS node,
which uses the Planning Scene ROS API to add them
to the planning scene. The scene objects that are rel-
evant for the movement calculations are represented
in MoveIt as boxes. Using Rviz it is possible to vi-
sualize them as green boxes (figure 2). In this case,
the objects are the two conveyor belts standing next
to Baxter that will be presented in section 3.2. To re-
duce the communication overload, objects’ positions
are updated only if their changes are above a given
threshold.
Figure 2: Rviz Visualization.
To publish the robot arms joint angles to Bax-
terVR, two separate topics are used, one for each arm,
with a custom message containing seven values, cor-
responding to each of the seven joints, obtained using
a MoveIt interface.
The BaxterVR simulation needs to be able to
make requests to MoveIt to control the robot. It also
requires the ability to preempt or cancel these re-
quests, for example when the object being picked up
moves. Periodic feedback is also necessary to syn-
chronize the actions on both sides, such as attaching a
picked-up object to Baxter’s end effector in Unity’s
side at the same time it is attached in MoveIt. A
ROS action is the perfect fit for the previous descrip-
tion and as such, a ROS action server was created to
control the simulated Baxter robot. When it receives
a request, it sends the necessary information to the
motion planner using the Motion Planning API. Bax-
terVR from its side can issue the following requests:
• Move the end-effector to a specific position.
• Move the end-effector to a specific position using
a Cartesian path.
• Pick up an object, given its position.
• Detach an object from a robot end-effector.
• Change the speed of the arms.
As mentioned previously, the robot needs to react
to changes in the environment, such as movements of
the object being picked up. With the Motion Planning
API, it is possible to make asynchronous requests
to the motion planner and cancel executing requests,
however, it does not provide a simple way to know
the status of a request being executed. A solution to
this problem is to monitor the result action topic from
the action that MoveIt uses to communicate with the
motion planner, as this topic is only published when
the motion is concluded while also giving information
about its success.
3.1.1 Rosbridge and ROS#
Unity, being the support for the development of Bax-
terVR applications, does not directly support the con-
nection to ROS. However, a lot of efforts have been
made over the last few years toward this goal (Hussein
et al., 2018) and it is now possible to use Rosbridge
on the ROS side and ROS# on the Unity side to make
this connection.
Rosbridge (or rosbridge suite) is a standard ROS
library that provides a JSON interface so that non-
ROS programs can send commands to ROS. ROS#
makes use of this interface using a Unity Asset Pack-
age to give Unity-based applications the ability to
communicate with ROS. This includes publishing and
subscribing to topics, communicating through ser-
vices and actions, and even use custom messages.
ROS# also introduces some important robotics func-
tionalities such as importing a robot through a Uni-
versal Robot Description Format (URDF) file. In this
project, this functionality was used to import Baxter’s
model.
3.1.2 Synchronous Biosignals Acquisition
To identify reactions to the distracting events in
the BaxterVR application both the user’s electro-
dermal activity (EDA) and heart rate (HR) are ac-
quired and stored. EDA is acquired using a Bitalino
board (da Silva et al., 2014) with a sampling rate of
1kHz using, whereas HR frequency is obtained us-
ing Polar H10 heart rate sensor, both of them using in
house developed applications that establish the LSL
bridge with these Bluetooth-enabled devices.
A VR Application for the Analysis of Human Responses to Collaborative Robots
71

The development of the Unity Based applica-
tion (BaxterVR) included support for Lab Streaming
Layer (LSL) for enabling the capture of the evolution
of hand and head coordinates, and registering the oc-
currence of the events described in the next section
(3.2). This LSL support was also included in the de-
velopment of both the Polar H10 and the Bitalino ap-
plication.
The synchronous signals acquisition is handled by
LabRecorder, the LSL recording application, which
receives the timestamped streams and stores them.
One of the major advantages of this framework is that
all the recorded data streams can then be related as
they share the same clock reference. LSL has another
big advantage, which is the easy integration of new
data sources in data collecting experiments.
3.2 A Collaborative Robot Scenario
The designed scenario mimics an industrial environ-
ment where the human executes a task in collabora-
tion with a robot. As with any real environment, unre-
lated events will happen that may lead to distractions
of the user contributing to errors and/or fatigue.
The basis of the current scenario consists of the
robot picking objects from a conveyor belt and hand-
ing them to the human partner. The human, in turn,
has to grab these objects and place them in boxes fol-
lowing a given protocol. To grab the objects the hu-
man has to reach over to them with the controller and
press a button that closes the virtual hand and attaches
the object to it. This method to interact with the object
was considered to be the most natural option since to
press the button the user has to close its hand around
the remote as if grasping a real object.
To move around the simulation the human has two
options, move in real life or use a joystick. The main
objective is for the users to move mainly in real life
and use the joystick to make small adjustments so that
the virtual room better adequates to the real one. In
the simulation, the users always start at the centre of
the room, independently of their position in the real
room. As such, in an extreme example, if the simula-
tion is started while the user is standing next to a wall
in real life, he can no longer move in the direction
blocked by the wall without the joystick.
For exploring different situations, the Baxter robot
has two different approaches for interacting with the
human: it can either hand the object to the human
and wait for him/her to grab it or drop the object on
the ground as soon as it reaches the delivery position
(figure 3). Dropped objects break into pieces once
they touch the ground, so the human has to wait until
Baxter picks and hands another one.
Figure 3: Baxter dropping an object.
The scenario is organized in increasing difficulty
levels aiming at analysing their effect on the user per-
formance. The task of delivering an object was made
purposely complex so that it requires the user to focus
on it to successfully complete a level.
As previously mentioned, one of the objectives of
this experiment is to understand how distractions in
the surrounding environment affect the user. With this
in mind, three types of events were created to redirect
the attention of the participant during the experiment.
Event Type 1: Thirty seconds into the experiment,
and every minute after that, a door opens at one side
of the room, with the appropriate sound, and a robot
cart appears, transporting a box (figure 11). It moves
across the room until it reaches another door, exiting
the room.
Event Type 2: Another event is a box that appears in
a conveyor belt on the corner of the room in random
time intervals between 15 and 35 seconds (figure 4).
A loud alarm can be heard when it appears as well as
the sound of the conveyor belts moving.
Event Type 3: Lastly, when there are only thirty sec-
onds left to complete the level, the clock on the wall
starts ticking and flashing red (figure 8).
Despite failing the level when the timer runs out,
the user does not automatically fail the entire test.
Each level is evaluated individually, and even after
failing, he must deliver all the objects to pass to the
next level.
Figure 4: Distracting box.
GRAPP 2022 - 17th International Conference on Computer Graphics Theory and Applications
72

This scenario was designed to be simple (figure 6)
so that it is processed fast enough to not cause any
discomfort to the user while at the same time contain-
ing elements similar to the ones found in an indus-
trial environment such as conveyor belts or transporter
robots. As already mentioned, the main objective is
to grab the objects handed by Baxter and place them
inside a box (figure 5). The objects are simple rectan-
gular bars and can be of four different colours, blue,
orange, green or indigo and have to be placed inside
a box with the corresponding colour. To obtain a box,
the user must press a button with the corresponding
colour. Once a box has one or two objects inside, to
score, the user has to deliver it by placing it on top of
an elevator and pressing a button (figure 7). On one
of the walls, there is a whiteboard that displays infor-
mation about the current level, more specifically, how
much time is left, the score, objects missed and the
difficulty level (figure 8).
Figure 5: User placing an object inside the box.
Figure 6: Surrounding environment.
The simulation has a total of five levels. The robot
speed increases with each level, starting at 50% of the
maximum speed, raising 10% per level. To success-
fully complete a level, the user must deliver a preset
amount of objects within two minutes. The number
of objects to deliver increases one per level and starts
at one object.
The objects handed by the robot arrive periodi-
cally on a conveyor belt next to Baxter, being their
sequence of colours of complete random order (figure
Figure 7: User delivering a box with one object.
Figure 8: Score Board.
9). When an object gets to the pre-defined position,
close to Baxter, the conveyor belt stops for a moment,
waiting for the robot to grab it (figure 10). If Bax-
ter starts the grabbing movement, the conveyor belt
doesn’t move until the object is grabbed, otherwise,
two seconds later, it starts moving again and the ob-
ject is lost. If the robot picks the object and hands it to
the user, it must be grabbed so that Baxter can pick up
another or, if at level three or above, the human must
pick the object before the robot reaches the delivery
position, otherwise it will fall to the ground and get
broken into pieces.
Figure 9: Conveyor belt that delivers the objects to Baxter.
A VR Application for the Analysis of Human Responses to Collaborative Robots
73
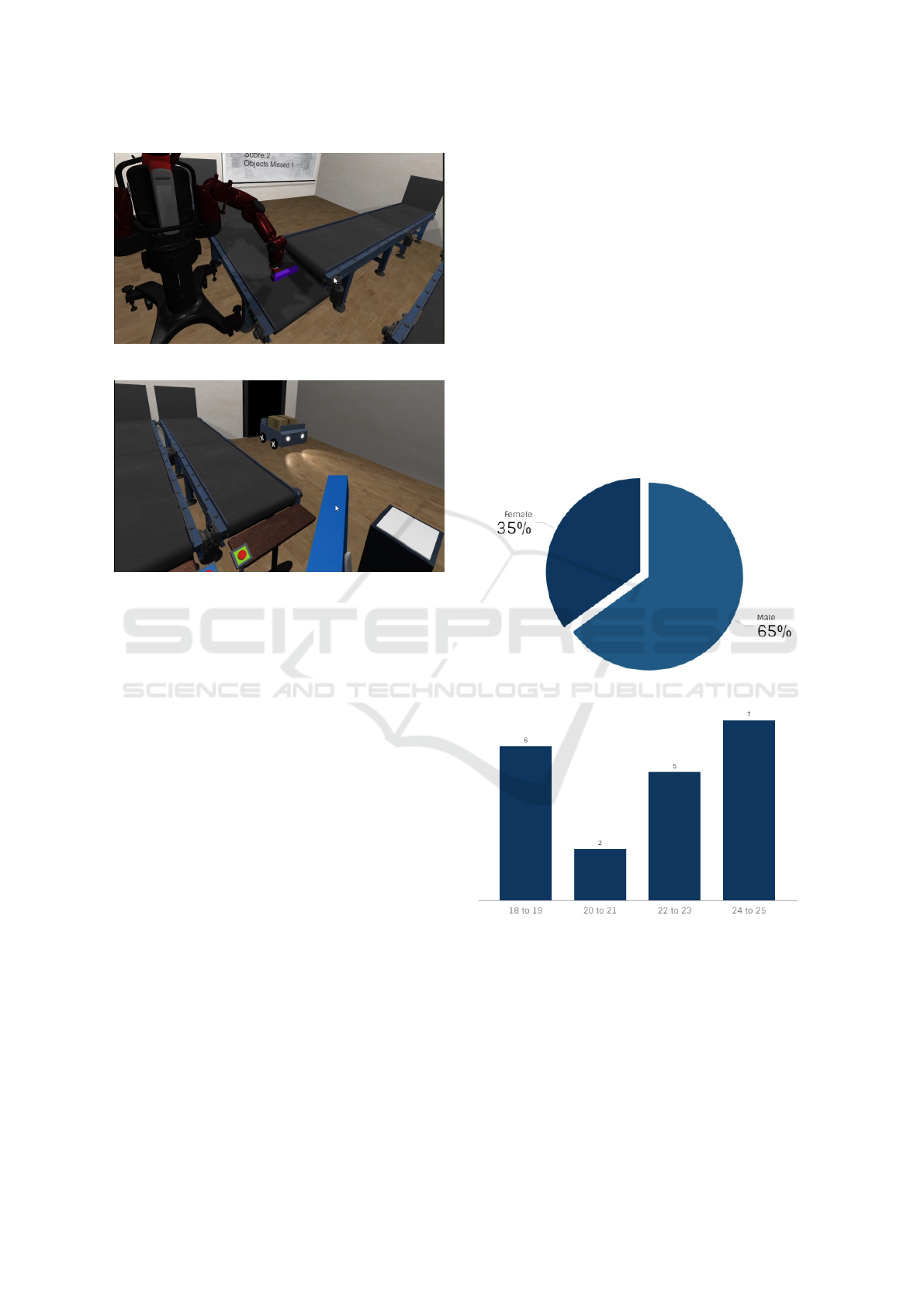
Figure 10: Baxter picking up an object.
Figure 11: Transporter robot.
4 A PILOT EXPERIMENT
Using the system described previously, a pilot exper-
iment was conducted to understand how the users re-
act to the distractions while interacting with a robot in
an industrial environment and how they feel about the
interaction.
Since this experiment focuses on VR interaction,
an important aspect to take into account is the equip-
ment to use to allow the user to experience the appli-
cation created.
There is currently a vast number of HMDs on the
market. The technical evolution of processors and
displays for the smartphones industry has created the
necessary support for new all-in-one headsets, such
as Oculus Quest, or Vive Focus. These products
have seen recently a dramatic improvement in terms
of the enclosed processing power, battery autonomy,
and display quality. Nevertheless, the tethered exist-
ing versions still enable the use of high-end graphics-
enabled computers both to process and display con-
tents, without requiring extensive optimisation efforts
or sacrificing any aspect of graphical quality. An-
other important advantage of these PC connected de-
vices is the possibility of establishing simple com-
munications with other software packages running on
the same machine. These reasons led to the devel-
opment of the BaxterVR application targeting Oculus
Rift™, exploring the compatibility mode of Oculus
Quest devices through a USB-C (Oculus Link) con-
nection with the computer running the application.
This is particularly convenient as it enables ROS-
MoveIt, LSL-data collectors, and the BaxterVR ap-
plication to share the same powerful machine and ex-
ploit simplified and reliable communications between
them.
In this study, the participants interact with the sim-
ulated robot described previously, while their biolog-
ical signals are recorded. In the end, they answer a
UEQ questionnaire (Laugwitz et al., 2008), a Flow
Short Scale Questionnaire (Rheinberg et al., 2006)
and a few open answer questions to allow the partic-
ipants to give any opinion that cannot be established
by the questionnaires, such as if they had motion sick-
ness and what was the cause.
Figure 12: Gender distribution of the participants.
Figure 13: Age distribution of the participants.
This pilot experiment had the participation of 20
volunteer students of MSc and PhD courses with a
gender distribution of 35% female and 65% male (fig-
ure 12), and ages between 18 and 25 years old (figure
13).
The protocol followed in the experiment was the
following:
1. Disinfect all the equipment used.
2. The participant is introduced to the experiment,
GRAPP 2022 - 17th International Conference on Computer Graphics Theory and Applications
74

Figure 14: UEQ Questionnaire results.
explained what he/she has to do to successfully
conclude each level and what data is going to be
collected and how.
3. The participant reads and signs a consent.
4. The EDA and HR sensors are placed on the par-
ticipant.
5. The participant puts on a hygienic mask for the
VR system and the VR system itself.
6. The simulation is started and the participant
should play it following the given rules and try-
ing to complete each level.
7. If at any time the participant starts feeling un-
comfortable with the experiment, the procedure
should immediately stop. Otherwise, he/she
should finish the simulation without any kind of
interruption.
8. When the simulation ends, either because the par-
ticipant concluded the final level or because it was
stopped early, ask if he/she wants to play again
and is asked his/her opinion on the simulation.
9. The participant fills a User Experience Question-
naire and a Flow Short Scale Questionnaire to
evaluate the simulation and answers four open an-
swer questions.
4.1 Analysis of the Questionnaires
From the analysis of the UEQ questionnaire, the high-
est rating categories were dependability, stimulation
and novelty with ”Excellent”, then attractiveness and
perspicuity with ”Good” and finally, efficiency with
”Above Average” (figure 14).
One of the most interesting results is the low rat-
ing of the Efficiency category, compared to the oth-
ers. When asked the opinion about the simulation
most people said that the robot seemed slow on the
later levels. In reality, the robot was moving faster
than in the first levels, however, the participants seem
to get used to the task they have to perform and end
up finishing it before the robot grabs another piece. In
the case of this simulation, the efficiency category can
also be thought of as the efficiency of the interaction,
since the perception of the robot being slower than it
should, translates into a low efficiency rating.
The Flow Short Scale questionnaire evaluates
three aspects of the simulation on a scale of 1 to 7:
flow, anxiety level and challenge level. Flow level
indicates if the user is feeling engaged and focused
while engaged in the activity. If the flow level is high,
the participants find the activity intrinsically interest-
ing and take pleasure and enjoyment when involved
in it. Anxiety level translates to how much anxiety
the users felt and challenge level indicates if the chal-
lenges presented were too difficult (7) or too easy (1).
Table 1 presents an average and the standard devi-
ation of the flow, anxiety and challenge level. Ac-
cording to the results, the challenge level seems to be
perfectly adequate, with a score of 4 and a relatively
low standard deviation of 0.458. The anxiety level
has the lowest value with 3.85, meaning that the par-
ticipants were not in high levels of anxiety during the
simulation. However, it presents a significant stan-
dard deviation of 1.512. This is partially due to some
of the anxiety scores being a lot higher than the av-
erage, with values reaching 5, 6 or even 7. Most of
these high scores are from the participants that were
using the joystick for moving in the VR environment,
and consequently, reported motion sickness. On the
other hand, most of the lowest scores on anxiety were
reported by the participants that felt that the robot was
too slow. Lastly, a flow score of 5.525 out of 7 means
that the participants liked the activity and the simu-
lation and felt engaged and focused, although some
aspects could be improved.
In the open answer questions, the users were asked
to describe the interaction with the robot; what were
the main difficulties; what caused the most distrac-
tion; and, at last, suggestions to improve the simula-
tion.
When asked to evaluate the surrounding distrac-
tions, the result was that the ticking clock and some
of the surrounding noises were the most distracting
elements. Some participants even ignored completely
the existence of the transporter robot. The reason for
this is that they were focused on the interaction and
A VR Application for the Analysis of Human Responses to Collaborative Robots
75

the task they had, which involved a lot of visual anal-
ysis.
Concerning the interaction with the robot, as men-
tioned previously, most people felt like it was too
slow, especially in the later levels. Some people also
reported that it felt like something was wrong when
the robot stopped waiting for them to grab the object,
dropping it on the ground instead. This interaction is
intended and is meant to test if it is more natural to
have the robot behave like it is aware of the human,
waiting for him to grab the object, or behaving like
a traditional robot that is just doing its task without
considering the collaborating partner. The results are
within the expectations, meaning that, even though in-
teracting with a non-sentient robot, the human still
feels like the interaction is more natural if the robot
reacts to his actions instead of doing a pre-planned
task.
One of the main complaints about this experiment
was related to the movement inside VR. The partic-
ipants have two ways to move inside VR, either by
using a joystick or by moving in real life. The real
space where the experiment takes place was roughly
the same size as the working space inside the simula-
tion. This led to two kinds of behaviours from the par-
ticipants, some would move in real life, concluding
the experiment without touching the joystick, others
moved almost exclusively with the joystick because
they were afraid to bump into something in real life.
Table 1: Results from the Flow Short Scale Questionnaire.
Average Standard Deviation
Flow 5.525 0.667
Anxiety 3.85 1.512
Challenge 4 0.459
4.2 Biological Signals
As mentioned previously, this experiment includes
the recording of electrodermal activity and heart rate
of the participants. Later the acquired data is to be
processed for further analysis. As an example, the
raw data collected from Bitalino’s EDA sensor is con-
verted to microsiemens using a formula provided in
Bitalino’s Electrodermal Activity (EDA) Sensor User
Manual (PLUX - Wireless Biosignals, 2020). Figure
15 (top) shows an example of a recorded EDA sig-
nal and figure 16 the HR of the same participant. The
blue vertical lines on figure 15 correspond to a spe-
cific event: the clock starts ticking.
As one of the objectives of this work is to try to
identify the influence of the simulation events on the
subject’s anxiety and stress, we expect to observe the
corresponding response in the acquired bio-signals.
Figure 15: Top: EDA signal of a participant. Bottom: Con-
tinuous Decomposition Analysis of the EDA signal.
Nevertheless, these signals do not have any kind of
absolute scale as their baselines and responses vary
from person to person. For example in what con-
cerns EDA signals can be divided into two parts: the
tonic component, or Skin Conductance Level (SCL)
which changes only slightly within tens of seconds,
and the phasic component or Skin Conductance Re-
sponse (SCR). The SCR represents a rapid change
that happens shortly after the onset of a stimulus, usu-
ally 1 to 5 seconds, and thus, it can be used to detect a
possible reaction to an event. When a response occurs
in the absence of a stimulus, it is called a non-specific
SCR.
To perform analysis on this signal, the free open-
source software Ledalab was used (Benedek and
Kaernbach, 2010a; Benedek and Kaernbach, 2010b).
The recorded signal is noisy and is recorded at a high
sample rate, so before the actual processing, it is nec-
essary to first downsample it and apply a moving av-
erage smoothing.
The filtered signal can then be analysed using a
Continuous Decomposition Analysis, extracting the
tonic and phasic activities (figure 15 (bottom)). In the
case of the example given (figure 15), event-related
activations are detected in the first, second and fourth
events. We can confirm these results through visual
analysis. After the first event (figure 17), a sudden
change in the skin conductance is verified with la-
tency between 2 and 3 seconds. This is in accordance
with the results obtained, which indicate an SCR af-
ter the first event, with a latency of 2.7 seconds. In
figure 18 it is possible to recognise the reaction of
five participants the first time the clock started tick-
ing. The event is represented by a vertical black line
and the conductivity values of each participant are rel-
GRAPP 2022 - 17th International Conference on Computer Graphics Theory and Applications
76

Figure 16: HR of a participant.
Figure 17: EDA response decomposition after the first
event: Gray: tonic component, Blue: phasic component.
0 1000 2000 3000 4000 5000 6000 7000 8000
Time [ms]
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
EDA [uS]
Figure 18: EDA responses to the clock ticking event, for 5
participants.
ative to the conductivity measured when the event oc-
curred.
At the time of the event, the EDA of all partici-
pants was decreasing and in a window of 1 to 4 sec-
onds after the event it changed its behaviour, present-
ing a positive slope variation. These correspond to
SCRs, which indicate a reaction to the ticking clock.
5 CONCLUSIONS
From this pilot experiment, we can extract some valu-
able information, even if only the questionnaires were
processed completely for the whole group of partici-
pants. First, from the UEQ questionnaire, we con-
clude that the overall looks and interaction in the sim-
ulation is satisfactory. This is an important aspect to
take into account because the more people test a prod-
uct, the more reliable the results are, and having them
enjoy the time spent with that product is a means to
attract more people into testing it.
Analysing the answers, the high results of the at-
tractiveness, perspicuity and stimulation categories,
together with the opinions of the participants, lead
us to believe that the objective of providing an ad-
equate VR-based alternative to real scenario exper-
iments was achieved. The lower score on the effi-
ciency category reveals that the interaction is less ef-
ficient than desired, as mentioned previously. Given
that the robot arm is moving at the maximum rec-
ommended speed in the last difficulty level, one way
to speed up the interaction and improve its efficiency
would be to use both of Baxter’s arms. In an ideal
situation, the robot would be waiting for the human
to complete his task and not the other way around.
This way the human would not feel like the robot was
holding him back, but instead, feel like it was helping
him.
The fact that most participants almost ignored the
existence of the transporter robot was not expected,
but it reveals that their focus was towards the interac-
tion and the task at hand, which ultimately is a good
thing. On the other hand, the ticking clock and sur-
rounding sounds causing the most distraction, suggest
that the most efficient distractions in these types of ex-
periments rely heavily on auditory queues.
Another aspect to take into account when deal-
ing with virtual reality applications is the surround-
ing space. Although having enough physical space
to move around, some users still prefer to move with
a joystick due to the fear of bumping into an object.
Moving with the joystick in most cases causes motion
sickness, especially if the user relies exclusively on
this type of motion. The option of using the joystick
to move in the simulation was left to the user so that
they could make small adjustments to their position in
VR to better adequate it to the real-world space. The
fact that some users chose to rely only on this type of
movement was unexpected, but since it can influence
the results, in future work, this possibility should be
removed.
One detail that also induced stress to some users,
mainly the same users that used only the joystick
movement, was the wire that connects the Oculus
Quest to the computer and the fear they would be-
come entangled. To have the best possible results, the
space that the users have to move around should be
A VR Application for the Analysis of Human Responses to Collaborative Robots
77

bigger than the one in the simulation and, ideally, the
simulation should be able to run using only a wire-
free headset so that the users can move around freely
without worrying about cables.
Future work will include a deeper analysis of the
acquired biosignals and relate them to user move-
ments and events responses recorded for the whole
group of participants. It would also be interesting to
use a signal to detect anxiety such as eyes movements.
REFERENCES
Al-Yacoub, A., Buerkle, A., Flanagan, M., Ferreira, P.,
Hubbard, E.-M., and Lohse, N. (2020). Effec-
tive human-robot collaboration through wearable sen-
sors. In 2020 25th IEEE International Conference
on Emerging Technologies and Factory Automation
(ETFA), volume 1, pages 651–658.
Aqajari, S. A. H., Naeini, E. K., Mehrabadi, M. A., Labbaf,
S., Rahmani, A. M., and Dutt, N. (2020). Gsr analy-
sis for stress: Development and validation of an open
source tool for noisy naturalistic gsr data.
Benedek, M. and Kaernbach, C. (2010a). A continuous
measure of phasic electrodermal activity. Journal of
Neuroscience Methods, 190(1):80–91.
Benedek, M. and Kaernbach, C. (2010b). Decomposition
of skin conductance data by means of nonnegative de-
convolution. Psychophysiology, 47(4):647–658.
Bi, L., xin’an, F., and Liu, Y. (2013). Eeg-based brain-
controlled mobile robots: A survey. Human-Machine
Systems, IEEE Transactions on, 43:161–176.
Blow, M., Dautenhahn, K., Appleby, A., Nehaniv, C. L.,
and Lee, D. (2006). The art of designing robot faces:
Dimensions for human-robot interaction. In Proceed-
ings of the 1st ACM SIGCHI/SIGART Conference on
Human-Robot Interaction, HRI ’06, page 331–332,
New York, NY, USA. Association for Computing Ma-
chinery.
da Silva, H. P., Guerreiro, J., Lourenc¸o, A., Fred, A., and
Martins, R. (2014). Bitalino: A novel hardware frame-
work for physiological computing. In Proceedings of
the International Conference on Physiological Com-
puting Systems - Volume 1: PhyCS,, pages 246–253.
INSTICC, SciTePress.
de Giorgio, A., Romero, M., Onori, M., and Wang, L.
(2017). Human-machine collaboration in virtual re-
ality for adaptive production engineering. Procedia
Manufacturing, 11:1279 – 1287. 27th International
Conference on Flexible Automation and Intelligent
Manufacturing, FAIM2017, 27-30 June 2017, Mod-
ena, Italy.
Duguleana, M., Barbuceanu, F. G., and Mogan, G. (2011).
Evaluating human-robot interaction during a manipu-
lation experiment conducted in immersive virtual re-
ality. In Shumaker, R., editor, Virtual and Mixed Real-
ity - New Trends, pages 164–173, Berlin, Heidelberg.
Springer Berlin Heidelberg.
Hussein, A., Garcia, F., and Olaverri Monreal, C. (2018).
Ros and unity based framework for intelligent vehi-
cles control and simulation.
Kidd, C. D. and Breazeal, C. (2008). Robots at home:
Understanding long-term human-robot interaction. In
2008 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems, pages 3230–3235.
Knudsen, M. and Kaivo-oja, J. (2020). Collaborative
robots: Frontiers of current literature. Journal of In-
telligent Systems: Theory and Applications, 3:13–20.
Kr
¨
uger, J., Lien, T., and Verl, A. (2009). Cooperation of
human and machines in assembly lines. CIRP Annals,
58(2):628–646.
Laugwitz, B., Held, T., and Schrepp, M. (2008). Construc-
tion and evaluation of a user experience questionnaire.
volume 5298, pages 63–76.
Liu, H., Qu, D., Xu, F., Zou, F., Song, J., and Jia, K. (2019).
A human-robot collaboration framework based on hu-
man motion prediction and task model in virtual envi-
ronment. In 2019 IEEE 9th Annual International Con-
ference on CYBER Technology in Automation, Con-
trol, and Intelligent Systems (CYBER), pages 1044–
1049.
Lutin, E., Hashimoto, R., De Raedt, W., and Van Hoof, C.
(2021). Feature extraction for stress detection in elec-
trodermal activity. In BIOSIGNALS, pages 177–185.
Maragkos, C., Vosniakos, G.-C., and Matsas, E. (2019).
Virtual reality assisted robot programming for hu-
man collaboration. Procedia Manufacturing, 38:1697
– 1704. 29th International Conference on Flexible
Automation and Intelligent Manufacturing ( FAIM
2019), June 24-28, 2019, Limerick, Ireland, Beyond
Industry 4.0: Industrial Advances, Engineering Edu-
cation and Intelligent Manufacturing.
Matsas, E. and Vosniakos, G.-C. (2017). Design of a vir-
tual reality training system for human–robot collabo-
ration in manufacturing tasks. International Journal
on Interactive Design and Manufacturing (IJIDeM),
11(2):139–153.
PLUX - Wireless Biosignals (2020). Electro-
dermal activity (eda) sensor user manual.
https://bitalino.com/storage/uploads/media/
electrodermal-activity-eda-user-manual.pdf. Ac-
cessed: 2021-09-27.
Rheinberg, F., Vollmeyer, R., and Engeser, S. (2006). Die
erfassung des flow-erlebens.
C¸
¨
ur
¨
ukl
¨
u, B., Dodig-Crnkovic, G., and Akan, B. (2010).
Towards industrial robots with human-like moral re-
sponsibilities. In 2010 5th ACM/IEEE International
Conference on Human-Robot Interaction (HRI), pages
85–86.
Stanford Artificial Intelligence Laboratory et al. (2020).
Robotic operating system.
Swartz Center for Computational Neuroscience (2021).
Labstreaminglayer. https://github.com/sccn/
labstreaminglayer. Accessed: 2021-09-27.
GRAPP 2022 - 17th International Conference on Computer Graphics Theory and Applications
78
