
Human Activity Recognition: A Spatio-temporal Image Encoding of 3D
Skeleton Data for Online Action Detection
Nassim Mokhtari
a
, Alexis N
´
ed
´
elec
b
and Pierre De Loor
c
Lab-STICC (CNRS UMR 6285), ENIB,
Centre Europ
´
een de R
´
ealit
´
e Virtuelle, Brest, France
Keywords:
3D Skeleton Data, Spatio-temporal Image Encoding, Sliding Window, Online Action Recognition, Human
Activity Recognition, Deep Learning.
Abstract:
Human activity recognition (HAR) based on skeleton data that can be extracted from videos (Kinect for ex-
ample) , or provided by a depth camera is a time series classification problem, where handling both spatial and
temporal dependencies is a crucial task, in order to achieve a good recognition. In the online human activity
recognition, identifying the beginning and end of an action is an important element, that might be difficult in a
continuous data flow. In this work, we present a 3D skeleton data encoding method to generate an image that
preserves the spatial and temporal dependencies existing between the skeletal joints.To allow online action
detection we combine this encoding system with a sliding window on the continous data stream. By this way,
no start or stop timestamp is needed and the recognition can be done at any moment. A deep learning CNN
algorithm is used to achieve actions online detection.
1 INTRODUCTION
The extraction of knowledge from sensor data has
become a very active field of research in part due
to the accessibility of data generated by technolog-
ical advances in the field of the Internet of Things
and their pervasiveness in everyday life. Research
on human activity recognition (HAR) has become
more widespread in recent years due to its use in sev-
eral areas such as surveillance-based security and life
support (Ronao and Cho, 2016). This research area
exploits different automatic learning techniques for
HAR like recognising ”do sport” activity, which im-
plies to recognise actions that constitute the activity
like running, jumping, etc...
According to (Wang et al., 2019), there are two
types of human activity recognition, sensor-based and
video-based. The first category is concerned with
data emitted by sensors such as accelerometers, gy-
roscope, bluetooth, sound sensors, Inertial Measure-
ment Unit (IMU), etc... .The second category is con-
cerned with the analysis of videos or images contain-
ing human movements, including depth cameras that
can provide skeletal data such as Kinect (Figure 1) .
a
https://orcid.org/0000-0002-9402-3638
b
https://orcid.org/0000-0003-3970-004X
c
https://orcid.org/0000-0002-5415-5505
In this work, we propose a spatio-temporal image
encoding for online action recognition (OAR) based
on 3D skeletal data, focusing on the use of depth cam-
eras (Kinect sensor), since they are less invasive than
wearable sensors (IMU). Our OAR system will be ex-
ploited to allow interaction between a user and a com-
puter system.
Studies have been made in this research field to
determine the characteristics of an activity as well as
the differences between form and style of the same
activity performed by several people (LeCun et al.,
2015; Duong et al., 2009). These features as well as
the time series constitute the basic information, if they
are well used, using a classifier and an extraction of
the most important features, they allow activity recog-
nition (Ronao and Cho, 2016).
Recent advances in the field of image classifica-
tion (Martins et al., 2020; Cao et al., 2020) and speech
recognition (Zhang et al., 2021; Mustaqeem and
Kwon, 2020) related to deep learning research, par-
ticularly convolutional neural networks, have demon-
strated their interest in feature extraction and classifi-
cation and seem to be best suited to our problem on
the recognition of human activities.
Data encoding is an important part of the learning
process, since the model’s performances are related
to the data encoding, choosing a good data represen-
448
Mokhtari, N., Nédélec, A. and De Loor, P.
Human Activity Recognition: A Spatio-temporal Image Encoding of 3D Skeleton Data for Online Action Detection.
DOI: 10.5220/0010835800003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
448-455
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Skeleton Joints Captured by Kinect V2 Sensor (Manghisi et al., 2017).
tation is crucial to achieve an accurate recognition.
There are several skeletal data representation proposi-
tions, such as using images (Liu et al., 2017c; Laraba
et al., 2017; Ludl et al., 2019) .
Performing Online Action Recognition (OAR)
implies to consider sensor’s data as a continuous
stream, where identifying the beginning and the end
of an action is an important element, that might be a
difficult task. One solution to overcome this problem
is the use of a sliding window on continuous data in
order to train the model (Delamare et al., 2021; Liu
et al., 2019; Weng et al., 2017; Kulkarni et al., 2014).
Activity recognition has a huge potential in many
areas. Our system can be used in different fields such
as sport (gesture training) or healthcare (functional re-
habilitation, Assistance Daily Living). Our system is
intended to be interactive with its users, so the im-
portant thing is to get the best compromise between
recognition rate and online detection, to be able to of-
fer a real-time interaction with a user.
The rest of the document is organised as follows:
Section 2 introduces a synthesis of the various works
carried out in the field skeleton data representation. In
Section 3 we present our proposed method for skele-
ton data representation. Section 4, will presents the
chosen data set that will be used for the experimen-
tal part of the work, presented in Section 5. Finally,
we will present the results of this work as well as the
possible developments to improve the human activity
recognition in real time in Section 6.
2 RELATED WORKS
In the case of human activity recognition based on
skeletal data, and in order to achieve a good recogni-
tion, the evolution of the different joints must be con-
sidered on both spatial and temporal domain, there-
fore, choosing an encoding that fulfils these criteria is
mandatory.
There are many proposals for encoding the skele-
tal data, such as using images, like the Encoded Hu-
man Pose Image (EHPI) proposed by (Ludl et al.,
2019), which encodes each joint of the skeleton, ex-
tracted from a video, as a pixel, where the x and y
coordination where first normalised, then used as val-
ues for the (R,G,B) color, where the third value was
fixed to 0 (Figure 2). This encoding was used with a
CNN to recognise actions from video data.
(Laraba et al., 2017) and (Pham, 2019) proposi-
tions, also make a transformation of the coordinates
(X, Y, Z) of a joint into components (R, G, B) of a
color. Each joint is represented by a pixel and each
frame is represented by a column. The result is an
image that corresponds to a specific action or activity.
(Laraba et al., 2017) proposed to duplicate rows of
the images, to enhance their information (Figure 3),
and used their encoding with a CNN on 3D Skeleton
data.
(Pham, 2019) proposed first, to reorder the skele-
ton joint according to (Du et al., 2015) proposition,
which divide human skeleton into five parts, includ-
Human Activity Recognition: A Spatio-temporal Image Encoding of 3D Skeleton Data for Online Action Detection
449

Figure 2: From skeletal joints to an Encoded Human Pose
Image (EHPI) (Ludl et al., 2019).
Figure 3: llustration of the proposed RGB representation of
a 3D skeleton sequence from (Laraba et al., 2017) repre-
senting a front kick.
ing two arms (P1, P2), two legs (P4, P5), and one
trunk (P3). In each part from P1 to P5, the joints
are concatenated according to their physical connec-
tions, then rearrange these parts in a sequential order
(P1 → P2 → P3 → P4 → P5). Then Pham pro-
posed SPMF (Skeleton Pose-Motion Feature) com-
bining 3D skeleton poses and their motions, using the
distance between joints. Finally, an Enhanced-SPMF
was proposed, using a color enhancement, for increas-
ing contrast and highlighting the texture and edges of
the motion maps (Figure 4). This method was used
with ResNet model, and achieved good performance
on human activity recognition common datasets, but,
one of the limitations listed by Pham is how to scope
with Online Action Recognition (OAR) task.
Figure 4: Enhanced-SPMF encoding of a forward kick
(Pham, 2019).
(Liu et al., 2017c) also proposed to encode the
data as images. Where the 3D data as well as the joint
numbers and the frame numbers were used to repre-
sent a movement sequence in a 5D space. These five
pieces of information are encoded in different ways in
ten separate frames. This ten images were exploited
by ten parallel AlexNets in order to recognise human
activities from 3D skeleton data.
(Yan et al., 2018) proposed a different way to rep-
resent skeletal data, using graphs, where each node
represents a joint in a timestamp t. The first step con-
sist of connecting joint with edges according to the
connectivity of human body structure, Then each joint
will be connected to the same joint in the consecutive
frame (Figure 5). A such representation can handle
both spatial and temporal dependencies, since each
node is connected to his spatial neighbours (according
to the skeletal) and also his temporal one (the previous
and following state of the joint) .
Figure 5: Spatial temporal graph of a skeleton sequence
(Yan et al., 2018).
3 PROPOSED METHOD
We propose to encode the sequences of skeletal data
as images, using the Encoded Human Pose Image in-
troduced by (Ludl et al., 2019), but, since the Kinect
can provide 3D data for each joint, we choose to use
each of (X,Y,Z) components of the joint in order to
calculate the (R,G,B) value, like (Laraba et al., 2017;
Pham, 2019) did. The (X,Y,Z) components are first
normalized, in order to make the encoding insensitive
to the skeletal morphology of the human body, and
then encoded into (R,G,B).
In order to preserve the spatial dependencies ex-
isting between the skeletal joints, we propose to re-
order the joint provided by the Kinect (initially order
as show in Figure 1) according to the human skeletal.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
450
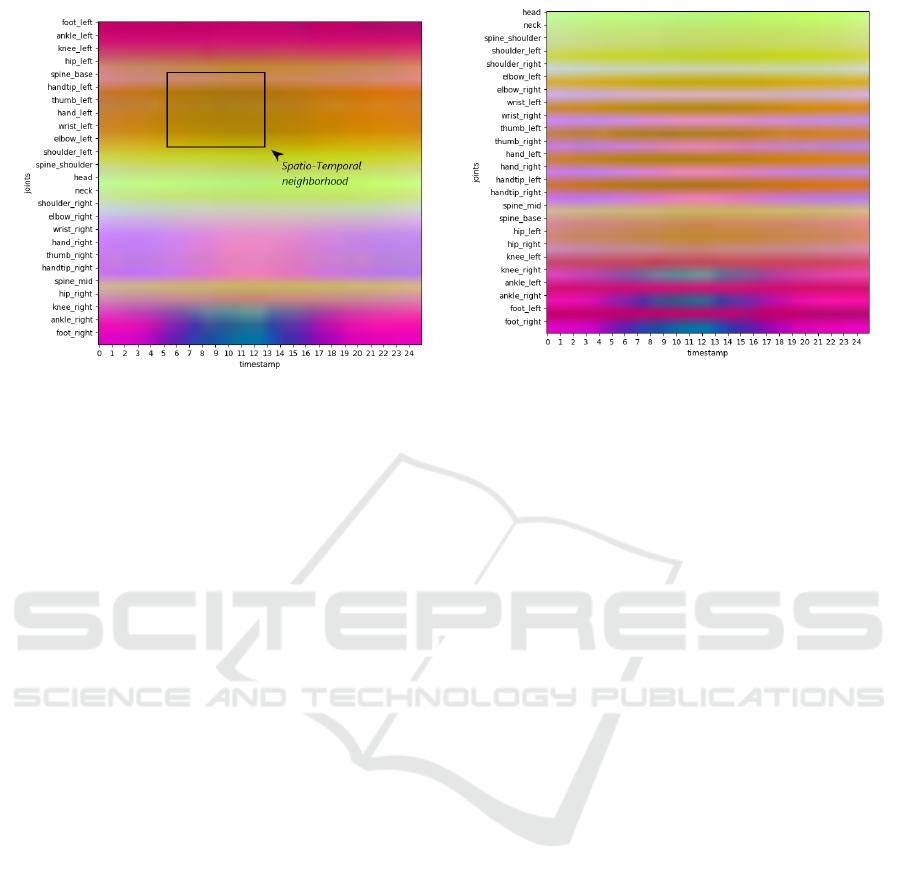
(a) Using foot to foot order.
(b) Using head to feet order.
Figure 6: Forward-Kick from UOW Online Action 3D data set using Skeletal encoding based on (EHPI).
We follow two different strategies :
• foot to foot : Starting from the left foot to the head
through the left arm, then from the head to the
right foot through the right arm.
• head to feet : Starting from the head to the feet
through the arms, in the other hand.
These representations ensure that both of spatial
and temporal dependencies are preserved, since each
pixel (joint at a timestamp t) is near to his temporal
neighbours (following the image width) and his spa-
tial one (following the image height).
The Figure 6 shows the representation of a for-
ward kick from the UOW Online Action 3D data set,
using the foot to foot order (Figure 6a) and the head
to feet order (Figure 6b), where we can notice that the
most important color changes are done in the right
foot, ankle and knee region.
The black square in Figure 6a represents a spatio-
temporal neighbourhood of a joint, applying a convo-
lution filter on a such image region, ensures to handle
the spatial dependency existing between joints, and
temporal one existing between frames.
Since we proposed to encode skeletal data as im-
ages, we choose to use a CNN model (presented in
Section 5.1) to perform this online action recognition,
due to their well-known performance in the field of
image processing, specifically in the task of features
extraction. We propose to use a pre-trained version of
VGG16, as we believe that using transfer learning for
feature extraction can be helpful and time saving,
As our main goal is to perform an Online Action
Recognition, this implies that the skeletal data have
to be treated in a stream. In this case, finding the start
of each action is a crucial point, that’s why, we used
the sliding window approach proposed by (Delamare
et al., 2021).
The training set is segmented into window of
equal length (which is the average of actions’ duration
in term of Kinect’s frames) in order to get sequences,
the labels of this sequences is the action performed
at the middle of the window, the offset of this slid-
ing window is fixed to one Kinect’s frame, which al-
lows us to have several encodings for the same action
(starting and ending at different points). Training our
model using this approach avoids identifying the start
and the end of an action, and ensure the action recog-
nition even when the data is provided as a stream.
4 DATASET
The proposed method is evaluated on two datasets,
the UOW Online Action 3D dataset, and the OAD
dataset. Both datasets have unsegmented online se-
quences of skeleton data, collected from a Kinect.
4.1 UOW Online Action 3D
The UOW Online Action 3D Contains 20 different ac-
tions (21 including the ”No-Action”), performed by
20 different subjects with up to 3-5 different execu-
tions. From each of the 48 sequences, the 25 joint
positions per frame were used as inputs (Tang et al.,
2017).The train is done on the repeated sequences,
and test on the continuous ones.
As proposed by (Delamare et al., 2021) The data
have been reorganised into windows of 50 frames as
it is the average duration of all actions in this dataset,
Human Activity Recognition: A Spatio-temporal Image Encoding of 3D Skeleton Data for Online Action Detection
451

Figure 7: The standard VGG-16 network architecture (Ferguson et al., 2017).
with a frame-by-frame offset, ending up having 91525
samples for the train subset (Where 25% is left for the
validation), and 22555 samples for the test subset.
4.2 The OAD Dataset
The Online Action Detection dataset (OAD) was cap-
tured using the Kinect V2, it includes 59 long se-
quences and 10 actions, including drinking, eating,
writing, opening cup- board, washing hands, opening
microwave, sweeping, gargling, throwing trash, and
wiping.The train is done on 30 sequences, and test on
20 sequences, the remaining 9 sequences are ignored
in our work, since they are used for the evaluation of
the running speed (Li et al., 2016).
The data have been reorganised into windows of
40 frames as it is the average duration of all actions in
this dataset, with a frame-by-frame offset, ending up
having 4152 (Where 25% is left for the validation),
and 4671 samples in the test subset.
5 RESULTS AND DISCUSSION
In this part of the work, we will present our experi-
mental results, obtained on the UOW Online Action
3D dataset and the OAD dataset. First, a comparison
between our skeleton encoding propositions (foot to
foot, head to feet) with ”no reorder” is done on the
UOW dataset, and then, we will compare our results
to existing works on both datasets.
5.1 Deep Learning Model
The Keras pre-trained version of the VGG16 model
(Figure 7), proposed by (Simonyan and Zisserman,
2015),is used as a feature extractor. We use the convo-
lution/pooling part of the VGG16 that will be frozen
during the training phase (no weight adjustment will
be done on it), followed by two Dense layers of 4096
units, with a Dropout probability of 0.5 and a batch
normalisation for each layer’s output. Finally a classi-
fier layer using so f tmax function is used for the class
inference.
The model is trained for 100 epochs, with batches
of 64 samples, using ADAM as our stochastic gradi-
ent descent method, with the following parameters :
• learning rate=0.001
• decay rate for the 1st moment = 0.9
• decay rate for the 2nd moment = 0.999
• epsilon = 1e-07
The weights giving the best the validation accu-
racy during the training process are stored.
5.2 Encoding Comparison
Our proposed method for skeleton data encoding will
produce images of dimension h x w, where h refers
to the number of joints, and w to the sliding window
length. Since we are working on data provided by
Kinect giving 25 joints, and the the sliding window
length is fixed to 50 for the UOW Online Action 3D
dataset, the result of our encoding will be images of
25x50.
We choose to resize our images to 224x224, which
is the default VGG16 input shape, since this model
does not support images bellow 32x32. The resizing
is done using the bi-linear interpolation, or the area
interpolation.
The comparison between the proposed encoding
methods is done according to the accuracy obtained
on the test subset of the UOW dataset. The results are
summarised in Table 1, where the ”no reorder” refers
to the use of Encoded Human Pose Image (EHPI) pro-
posed by (Ludl et al., 2019).
From the results presented in Table 1, we can no-
tice that the resizing using the bi-linear interpolation
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
452
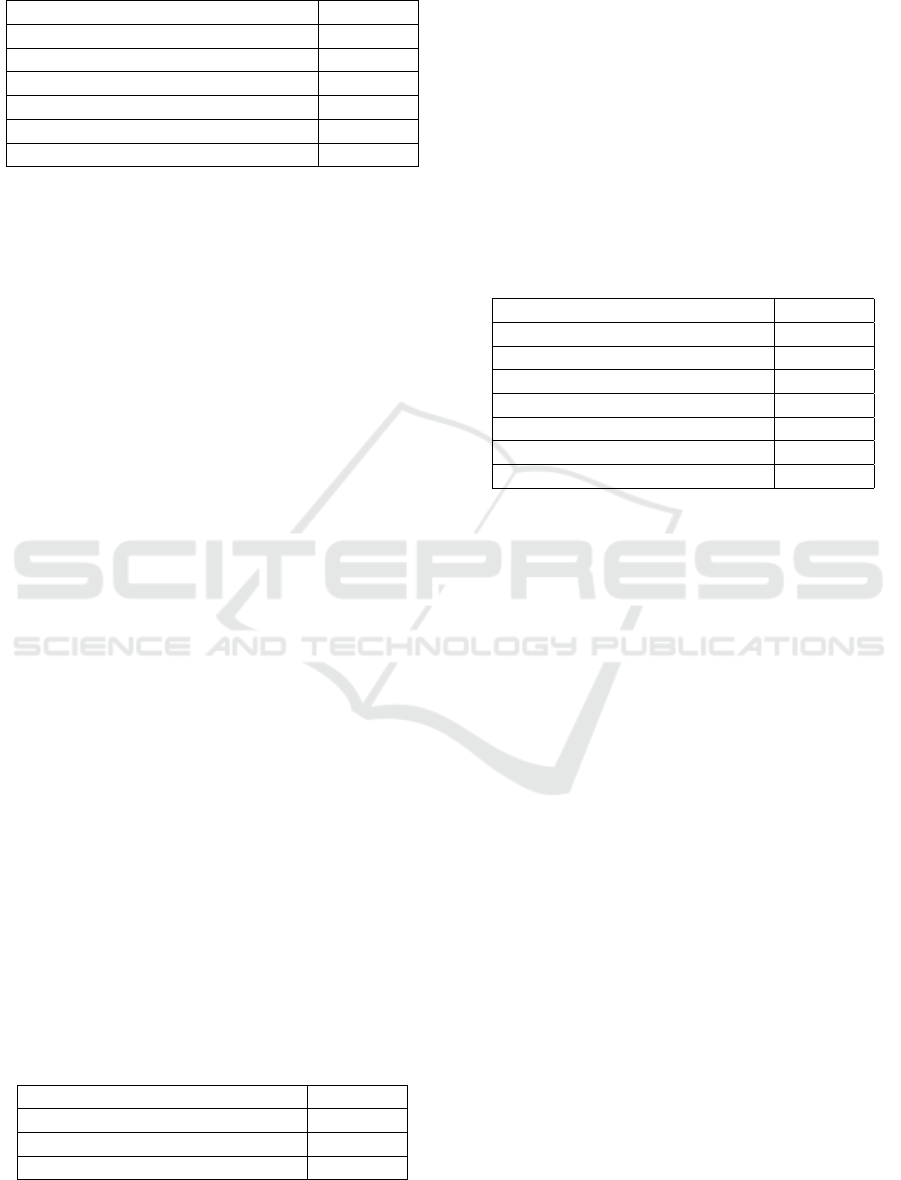
Table 1: Results of encoding method comparison on the
UOW dataset.
Encoding method Accuracy
foot to foot + bi-linear interpolation 71.38 %
foot to foot + area interpolation 70.54 %
head to feet + bi-linear interpolation 69.01 %
head to feet + area interpolation 66.82 %
no reorder + bi-linear interpolation 69.35 %
no reorder + area interpolation 68.88 %
offers better performances then the area interpolation
in all cases. Reordering the skeleton data from the left
foot to the head through the left arm, then from the
head to the right foot through the right arm gives the
best accuracy, this result demonstrates the contribu-
tion of our proposal to the handle the spatio-temporal
dependencies.
We decided to introduce some sparsity in our
model, by adding L1 regularisation to the last layer, in
order to improve the classification by using only the
relevant features. This regularisation rises our overall
accuracy to 73.54 %.
For the rest of tests, we will use a foot to foot re-
order combined with a bi-linear interpolation.
5.3 UOW Online Action 3D Dataset
Comparison
The UOW Online Action 3D dataset is recent and
does not propose a method similar to ours, except
(Delamare et al., 2021) proposition, which was not
tested according to the UOW protocol, since they
choose to train on 46 sequences, validate on 1, and
test on the remaining one.
(Delamare et al., 2021) proposed the Sliding Win-
dow Graph Convolutional Network (SW-GCN), that
represents a sequence of skeletal data obtained using
a sliding window, as a graph, then use the GCN pro-
posed by (Yan et al., 2018), they also implemented a
Sliding Window Convolutional Neural Network (SW-
CNN) to compare with their proposition.
In order to compare our proposition to the SW-
CNN and SW-GCN, we tested our proposition on the
last sequence of the UOW dataset. The Table 2 sum-
marises the comparison between our proposition and
the related works on the UOW dataset.
Table 2: Comparison with related works on the UOW
dataset according to accuracy.
Method Accuracy
SW-CNN (Delamare et al., 2021) 68 %
SW-GCN (Delamare et al., 2021) 75.5%
VGG16 + our encoding 81.9 %
From the results presented in Table 2, we can no-
tice that our proposition outperform the SW-CNN,
and SW-GCN, by improving the best accuracy by
6.4 %. This result show that an image can handle both
spatial and temporal dependencies, and can even offer
better performances compared to a graph representa-
tion.
5.4 OAD Dataset Comparison
The Table 3 summarises the comparison between our
proposition and the related works on the OAD dataset.
Table 3: Comparison with related works on the OAD
dataset according to accuracy.
Method Accuracy
JCR-RNN (Li et al., 2016) 78.8%
ST-LSTM (Liu et al., 2017a) 77.5 %
Attention Net (Liu et al., 2017b) 78.3%
FSNet (Liu et al., 2019) 81.3 %
SSNet (Liu et al., 2019) 82.8%
VGG16 + our encoding 84.18 %
VGG16 + our encoding + L1 86.81 %
(Delamare et al., 2021) tested their proposition on
the OAD dataset and obtained 90% of overall accu-
racy, but since it does not follow the dataset testing
protocol proposed by (Li et al., 2016), we did not
compared our proposition to their on this data set.
The best known overall accuracy for the OAD
dataset, following the testing protocol, is 82.8%, ob-
tained by (Liu et al., 2019) with their Scale Selec-
tion Network (SSNet), our method could improve this
overall accuracy, by getting 84.18 %. The use of L1
regularisation on the last layer rises our overall accu-
racy to 86.81 %.
The Figure 8 shows our confusion matrix for the
OAD dataset, where we can see that actions like
Washing hands, Wiping, Opening Microwave oven,
Throwing trash are well recognised, with more then
96% accuracy, while drinking action has the worst
accuracy with 57.67 %, confused with eating action
(31.91 %) of the time. This can be explained by the
fact that both actions are kind of similar, since both
implies the movement of the hand to the mouth.
The Table 4 shows a comparison between our pro-
posed method, and related works on the OAD dataset,
according the the F1-Score. We can see that our
proposition outperforms all methods, on all actions,
except the result of X and their RNN-SW or Writing
action, which is 0.01% better.
A short video showing our model performing on-
line action detection on a sequence from the OAD
dataset can be found on Youtube
Human Activity Recognition: A Spatio-temporal Image Encoding of 3D Skeleton Data for Online Action Detection
453

Table 4: Comparison with related works on the OAD dataset according to F1-Score.
Actions SVM-SW
(Li et al., 2016)
RNN-SW
(Zhu et al., 2016)
CA RNN
(Li et al., 2016)
JCR RNN
(Li et al., 2016)
our
proposition
Drinking 0.15 0.44 0.58 0.57 0.67
Eating 0.47 0.55 0.56 0.52 0.81
Writing 0.65 0.86 0.75 0.82 0.85
Opening cup-
board
0.30 0.32 0.49 0.50 0.76
Washing
hands
0.56 0.67 0.67 0.71 0.92
Opening Mi-
crowave oven
0.60 0.67 0.47 0.70 0.96
Sweeping 0.46 0.59 0.60 0.64 0.90
Gargling 0.44 0.55 0.58 0.62 0.77
Throwing
trash
0.55 0.674 0.43 0.46 0.89
Wiping 0.86 0.75 0.76 0.78 0.98
Figure 8: Confusion Matrix obtained by our method on
OAD dataset.
6 CONCLUSION
The human activity recognition based on skeleton
data is a time series classification problem, where
handling both spatial and temporal dependencies is a
crucial task, in order to achieve a good recognition.
In this work, we presented a skeleton data repre-
sentation under image, based on an existing skeleton
encoding, the Encoded Human Pose Image (EHPI).
Our proposition preserves the spatial and temporal de-
pendencies existing between the skeletal joints, by re-
ordering the joints according to the human skeleton.
In the online human activity recognition, identify-
ing the beginning and the end of an action is an im-
portant element, that might be difficult when the data
is coming in a stream way. We chose to combine pro-
posed encoding with a sliding window approach, in
order to perform an online human activity recogni-
tion.
We proposed a transfer learning approach, by us-
ing a pre-trained deep neural network model (VGG16
provided by Keras) for feature extraction, combined
with classification layers, in order to achieve online
action recognition,
The experimentation done on the UOW Online
Action 3D Dataset showed that our encoding proposi-
tion can improve the baseline technique proposed by
(Ludl et al., 2019), by reordering the joints according
the human skeleton, starting from the left foot to the
right one, through the head.
Our proposition outperforms existing methods on
two challenging datasets : The UOW Online Action
3D and the OAD dataset, by getting 81.9% accuracy
on the first one, and 86.81% on the second, improv-
ing the best known accuracy by respectively 6.5% and
4.01%.
On the OAD dataset most of actions where well
recognised (with at least 90%) where some actions
like ”Opening Microwave oven” are recognised with
99%, while ”drinking” action has the worst accuracy
with 57.67 %, confused with ”eating”, which can be
caused by the similarity of both actions. A video was
uploaded to Youtube showing our online action detec-
tion on this dataset
As a future work, we aim to improve our skele-
ton data encoding method by enhancing motion in-
formation focusing on the most important joints. We
also aim to use Recurrent Neural Networks combined
with CNNs to a better use of the temporal informa-
tion present in our skeleton data encoding, since each
image row represents the evolution of a joint in time,
using RNNs might be relevant.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
454

ACKNOWLEDGEMENTS
This work has been carried out within the French-
Canadian project DOMAID which is funded by the
National Agency for Research (ANR-20-CE26-0014-
01) and the FRQSC.
REFERENCES
Cao, X., Yao, J., Xu, Z., and Meng, D. (2020). Hyperspec-
tral image classification with convolutional neural net-
work and active learning. IEEE Transactions on Geo-
science and Remote Sensing, 58(7):4604–4616.
Delamare, M., Laville, C., Cabani, A., and Chafouk, H.
(2021). Graph convolutional networks skeleton-based
action recognition for continuous data stream: A slid-
ing window approach.
Du, Y., Wang, W., and Wang, L. (2015). Hierarchical recur-
rent neural network for skeleton based action recogni-
tion. In Proceedings of the IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR).
Duong, T., Phung, D., Bui, H., and Venkatesh, S. (2009).
Efficient duration and hierarchical modeling for hu-
man activity recognition. Artificial Intelligence,
173:830–856.
Ferguson, M., ak, R., Lee, Y.-T., and Law, K. (2017). Au-
tomatic localization of casting defects with convolu-
tional neural networks. pages 1726–1735.
Kulkarni, K., Evangelidis, G., Cech, J., and Horaud, R.
(2014). Continuous action recognition based on se-
quence alignment. International Journal of Computer
Vision, 112(1):90–114.
Laraba, S., Brahimi, M., Tilmanne, J., and Dutoit, T. (2017).
3d skeleton-based action recognition by representing
motion capture sequences as 2d-rgb images. Com-
puter Animation and Virtual Worlds, 28.
LeCun, Y., Bengio, Y., and Hinton, G. (2015). Deep learn-
ing. Nature, 521:436–44.
Li, Y., Lan, C., Xing, J., Zeng, W., Yuan, C., and
Liu, J. (2016). Online human action detection us-
ing joint classification-regression recurrent neural net-
works. volume 9911, pages 203–220.
Liu, J., Shahroudy, A., Wang, G., Duan, L.-Y., and Kot, A.
(2019). Skeleton-based online action prediction using
scale selection network. IEEE Transactions on Pattern
Analysis and Machine Intelligence, PP.
Liu, J., Shahroudy, A., Xu, D., Kot, A. C., and Wang,
G. (2017a). Skeleton-based action recognition using
spatio-temporal lstm network with trust gates.
Liu, J., Wang, G., Hu, P., Duan, L.-Y., and Kot, A. C.
(2017b). Global context-aware attention lstm net-
works for 3d action recognition. In 2017 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 3671–3680.
Liu, M., Liu, H., and Chen, C. (2017c). Enhanced skeleton
visualization for view invariant human action recogni-
tion. Pattern Recognition, 68:346–362.
Ludl, D., Gulde, T., and Curio, C. (2019). Simple yet effi-
cient real-time pose-based action recognition.
Manghisi, V. M., Uva, A. E., Fiorentino, M., Bevilacqua,
V., Trotta, G. F., and Monno, G. (2017). Real time
rula assessment using kinect v2 sensor. Applied Er-
gonomics, 65:481–491.
Martins, V., Kaleita, A., Gelder, B., Silveira, H., and Abe,
C. (2020). Exploring multiscale object-based convo-
lutional neural network (multi-ocnn) for remote sens-
ing image classification at high spatial resolution. IS-
PRS Journal of Photogrammetry and Remote Sensing,
168:56–73.
Mustaqeem and Kwon, S. (2020). Mlt-dnet: Speech emo-
tion recognition using 1d dilated cnn based on multi-
learning trick approach. Expert Systems with Applica-
tions, 167.
Pham, H.-H. (2019). Architectures d’apprentissage pro-
fond pour la reconnaissance d’actions humaines dans
des s
´
equences vid
´
eo rgb-d monoculaires: application
`
a la surveillance dans les transports publics. HAL
https://hal.inria.fr/hal-01678006.
Ronao, C. A. and Cho, S.-B. (2016). Human activity recog-
nition with smartphone sensors using deep learning
neural networks. Expert Systems with Applications,
59:235–244.
Simonyan, K. and Zisserman, A. (2015). Very deep convo-
lutional networks for large-scale image recognition.
Tang, C., Wang, P., and Li, W. (2017). Online action recog-
nition based on incremental learning of weighted co-
variance descriptors.
Wang, J., Chen, Y., Hao, S., Peng, X., and Hu, L. (2019).
Deep learning for sensor-based activity recognition: A
survey. Pattern Recognition Letters, 119:3–11.
Weng, J., Weng, C., and Yuan, J. (2017). Spatio-temporal
naive-bayes nearest-neighbor (st-nbnn) for skeleton-
based action recognition.
Yan, S., Xiong, Y., and Lin, D. (2018). Spatial temporal
graph convolutional networks for skeleton-based ac-
tion recognition.
Zhang, N., Wang, J., Wei, W., Qu, X., Cheng, N., and Xiao,
J. (2021). Cacnet: Cube attentional cnn for automatic
speech recognition. In 2021 International Joint Con-
ference on Neural Networks (IJCNN), pages 1–7.
Zhu, W., Lan, C., Xing, J., Zeng, W., Li, Y., Shen, L.,
and Xie, X. (2016). Co-occurrence feature learning
for skeleton based action recognition using regular-
ized deep lstm networks.
Human Activity Recognition: A Spatio-temporal Image Encoding of 3D Skeleton Data for Online Action Detection
455
