
UAV-ReID: A Benchmark on Unmanned Aerial Vehicle Re-identification
in Video Imagery
Daniel Organisciak
1
, Matthew Poyser
2
, Aishah Alsehaim
2
, Shanfeng Hu
1
, Brian K. S. Isaac-Medina
2
,
Toby P. Breckon
2
and Hubert P. H. Shum
2,∗
1
Department of Computer and Information Sciences, Northumbria University, Newcastle upon Tyne, U.K.
2
Department of Computer Science, Durham University, Durham, U.K.
Keywords:
Drone, UAV, Re-ID, Tracking, Deep Learning, Convolutional Neural Network.
Abstract:
As unmanned aerial vehicles (UAV) become more accessible with a growing range of applications, the risk of
UAV disruption increases. Recent development in deep learning allows vision-based counter-UAV systems to
detect and track UAVs with a single camera. However, the limited field of view of a single camera necessitates
multi-camera configurations to match UAVs across viewpoints – a problem known as re-identification (Re-
ID). While there has been extensive research on person and vehicle Re-ID to match objects across time and
viewpoints, to the best of our knowledge, UAV Re-ID remains unresearched but challenging due to great
differences in scale and pose. We propose the first UAV re-identification data set, UAV-reID, to facilitate the
development of machine learning solutions in multi-camera environments. UAV-reID has two sub-challenges:
Temporally-Near and Big-to-Small to evaluate Re-ID performance across viewpoints and scale respectively.
We conduct a benchmark study by extensively evaluating different Re-ID deep learning based approaches and
their variants, spanning both convolutional and transformer architectures. Under the optimal configuration,
such approaches are sufficiently powerful to learn a well-performing representation for UAV (81.9% mAP for
Temporally-Near, 46.5% for the more difficult Big-to-Small challenge), while vision transformers are the most
robust to extreme variance of scale.
1 INTRODUCTION
Unmanned aerial vehicles (UAV) are becoming more
accessible and more powerful through technological
advancement. Their small size and manoeuvrabil-
ity allows for a wealth of applications, such as film-
making, search and rescue, infrastructure inspection,
and landscape surveying. However, the malicious or
accidental use of UAVs could pose a risk to aviation
safety systems or privacy. This necessitates the de-
velopment of counter-UAV systems. Due to the re-
cent development of computer vision and deep learn-
ing, vision-based UAV detection and tracking systems
have become more robust and reliable (Isaac-Medina
et al., 2021; Jiang et al., 2021).
There are two major issues with existing vision-
based counter-UAV systems: firstly, many systems
are only built for a single camera – once a UAV
leaves the range of capture, the captured information
can no longer be re-used; secondly, to help prevent
ID-switching and handle occlusion, many tracking
∗
Corresponding author
frameworks rely on a generic re-identification (Re-
ID) module, which cannot comprehensively handle
the complex challenges that come with re-identifying
UAVs (Isaac-Medina et al., 2021).
Of these, DeepSORT (Wojke et al., 2017) and
Tracktor (Bergmann et al., 2019) are perhaps the two
most prominent frameworks within the tracking do-
main. Tracktor requires the network to associate new
and previously disassociated tracks. DeepSORT on
the other hand, employs its Re-ID module at each
time step within the Hungarian Algorithm (Kuhn,
2012) to associate new and old detections. Indeed, in
the original and many subsequent works, the associa-
tion metric is heavily weighted towards the output of
the Re-ID network, especially when camera motion is
particularly prevalent. The reliance upon robust rei-
dentification networks by both single and multi-view
tracking frameworks is evident and thus dedicated
study to effectively re-identify UAVs is essential to
solve both problems. To enable a cross-camera UAV
system, effective Re-ID is needed to match observed
UAVs from one camera to another from different an-
136
Organisciak, D., Poyser, M., Alsehaim, A., Hu, S., Isaac-Medina, B., Breckon, T. and Shum, H.
UAV-ReID: A Benchmark on Unmanned Aerial Vehicle Re-identification in Video Imagery.
DOI: 10.5220/0010836600003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
136-146
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Big-to-Small
Temporally-Near
Figure 1: The two Re-ID sub-challenges we explore.
Temporally-Near models the difficulties of tracking UAVs,
whereas Big-to-Small simulates cross-camera or temporally
distant challenges of matching UAVs.
gles, poses, and scales. Generic Re-ID mechanisms
within off-the-shelf tracking frameworks can be im-
proved by designing a bespoke UAV Re-ID system to
handle these extreme changes.
There has been a large body of research in Re-
ID for pedestrians (Ye et al., 2021) and vehicles
(Deng et al., 2021). Most state-of-the-art person Re-
ID research typically employ engineering solutions
to improve performance, such as a ‘bag of tricks’
(Luo et al., 2019), which identifies several key Re-
ID principles to adhere to. Indeed, such methods
have been illustrated to introduce sufficient robust-
ness such that state of the art results for person Re-ID
can be achieved, even by shallow networks (Breckon
and Alsehaim, 2021). Other works exploit the rela-
tively static colour profile of pedestrians across views
with part-based systems (Sun et al., 2018; Fu et al.,
2019). In contrast, vehicles have drastically different
appearances across views, so this information must be
incorporated into the model (Zhou and Shao, 2018).
For UAV Re-ID, even more consideration is required
due to the increased potential for the change in view-
ing angle of the UAV target from any given camera
position owing to their unconstrained motion in 3D
space.
As a result of their unconstrained aerial motion
UAV may undergo considerably greater changes in
scale relative to the camera than comparable pedes-
trian or vehicle targets. Furthermore, they can appear
from any angle on the sphere, compared to pedestri-
ans and vehicles, that are typically captured from a
0-30°elevation. As a result of these extended inter-
view object tracking challenges, a study is required to
evaluate the performance of existing Re-ID systems
on these challenges that UAVs provide.
However, to the best of our knowledge, there
has been no research on UAV Re-ID. In the ab-
sence of a true multi-view UAV data set, we pro-
pose the UAV-reID dataset, as a new and challeng-
ing benchmark for UAV Re-ID. To simulate Re-ID
challenges, UAV-reID has two sub-challenge dataset
splits: Temporally-Near aims to evaluate the perfor-
mance across a short time distance, as Re-ID mod-
ules within tracking frameworks must successfully
identify the same UAV in subsequent frames within
videos; Big-to-Small evaluates Re-ID performance
across large scale differences. The results inform Re-
ID performance of matching UAVs across two cam-
eras, or across a large timescale within the same cam-
era. Figure 1 visualises these sub-challenges.
We conduct a benchmark study of state-of-the-art
deep neural networks and frameworks designed for
Re-ID, including ResNet (He et al., 2016), SE-ResNet
(Hu et al., 2018), SE-ResNeXt (Xie et al., 2017), Vi-
sion Transformers (ViT) (Dosovitskiy et al., 2021),
ResNetMid (Yu et al., 2017), Omni-scale Network
(OSNet) (Zhou et al., 2019), Multi-level Factorisation
Network (MLFN) (Chang et al., 2018), Parts-based
Convolutional Baseline (PCB) (Sun et al., 2018),
Harmonious Attention Network (HACNN) (Li et al.,
2018), and Not 3D Re-ID (N3D-ReID) (Breckon and
Alsehaim, 2021). We test all baselines with a cross-
entropy loss, a triplet loss, a combined loss and a
multi-loss.
Experimental results show that existing Re-ID
networks cannot transfer seamlessly to UAV Re-ID,
with the best setup achieving 81.9% mAP under
Temporally-Near and 46.5% under Big-to-Small. ViT
is the most robust to extreme scale variance. This
compares to 84.61% (Breckon and Alsehaim, 2021)
performance when evaluated on typical pedestrian or
vehicle targets (e.g. MARS dataset (Zheng et al.,
2016)) as are commonplace in existing Re-ID eval-
uation benchmarks.
The contributions of this paper are summarised as
follows:
• proposal of the novel task of UAV Re-ID to match
UAVs across cameras and time frames, to improve
visual security solutions on UAVs
• construction of the first UAV Re-ID data set
UAV-reID, to facilitate Re-ID system development
and benchmarking. This is formulated by two
sub-challenge dataset splits, Temporally-Near and
Big-to-Small, to evaluate performance under con-
ditions where Re-ID is used in a practical environ-
ment, and remain applicable even when dataset
availability is constrained.
• creation of the first extensive benchmark over
UAV-ReID: A Benchmark on Unmanned Aerial Vehicle Re-identification in Video Imagery
137

a variety of state-of-the-art Re-ID architectures
within the UAV domain: ResNet, SE-ResNet, SE-
ResNeXt, ViT, ResNetMid, OSNet, MLFN, PCB,
HACNN, N3D-ReID; with critical evaluation of
their strengths and weaknesses, obtaining 81.9%
mAP on Temporally-Near and 46.5% mAP on
Big-to-Small.
2 RELATED WORK
Here we detail existing literature with respect to evo-
lution of Re-ID methodology, and its application
within the UAV domain.
2.1 Re-identification
Before large-scale Re-ID data sets were proposed,
traditional machine learning works focused on de-
signing hand-crafted features and learning distance
metrics (Karanam et al., 2019). Even though UAV-
reID is a small data set, UAVs can appear at many
different sizes and it is difficult to hand-craft fea-
tures that are robust to this extreme scale transfor-
mation. For this reason, we conduct this study on
deep learning methods which are capable of comput-
ing robust features (He et al., 2016; Hu et al., 2018)
and demonstrate supreme performance on other Re-
ID tasks (Sun et al., 2018; Hermans et al., 2017; Li
et al., 2018).
Re-ID with deep learning became popular after
the release of ResNet (He et al., 2016) with many
works taking advantage of the complex information
that very deep features could encode. More recently,
extensions such as SE-ResNet (Hu et al., 2018) and
SE-ResNeXt (Xie et al., 2017) have seen more use
as a generic backbone architecture for Re-ID frame-
works. These frameworks commonly consist of engi-
neering solutions (Luo et al., 2019) for easier repre-
sentation matching. Person Re-ID (Ye et al., 2021)
frameworks typically take advantage of the similar
colour profile of pedestrians across views, often by
splitting the image into parts (Sun et al., 2018; Fu
et al., 2019) to separately encode information of the
head, clothes, and shoes. Conversely, vehicle Re-ID
(Deng et al., 2021) has to contend with shape infor-
mation that undergoes significant deformation across
viewpoints, which may require encoding viewpoint
information within the model (Zhou and Shao, 2018;
Meng et al., 2020).
Compared to most classification problems, Re-
ID often contains many classes (individuals, vehicles,
UAVs) and few samples per class. This makes learn-
ing class-specific features difficult. To handle this
problem, it is often beneficial to consider metric learn-
ing, usually in the form of the triplet loss (Hoffer and
Ailon, 2015) or centre loss (Wen et al., 2016). The
triplet loss in particular has seen extensive use for per-
son (Hermans et al., 2017; Cheng et al., 2016) and ve-
hicle (Kuma et al., 2019) Re-ID, and can even handle
both tasks simultaneously (Organisciak et al., 2020).
Within this study it is therefore natural to consider the
triplet loss for UAV Re-ID.
2.2 Computer Vision on UAV
A large body of research applying computer vi-
sion to imagery captured by UAVs has been devel-
oped, including object detection (Gaszczak et al.,
2011), visual saliency detection (Sokalski et al., 2010;
G
¨
okstorp and Breckon, 2021), visual segmentation
(Lyu et al., 2020), target tracking (Li et al., 2020)
and aerial Re-ID (Grigorev et al., 2019; Teng et al.,
2021; Zhang et al., 2021). However, the study of
such tasks where UAV are the main object of inter-
est has not been extensively investigated. Most UAV-
related computer vision research is focused on deep
learning approaches for UAV detection and tracking
(Isaac-Medina et al., 2021; Liu et al., 2020b; Craye
and Ardjoune, 2019; Opromolla et al., 2019). In this
context, some data sets have been created to investi-
gate novel visual-based counter-UAV systems. The
Drone-vs-Bird Challenge data set (Coluccia et al.,
2019) collects a series of videos where UAV usu-
ally appear small and can be easily confused with
other objects, such as birds. Recently, the Anti-UAV
data set (Jiang et al., 2021) has been proposed to
evaluate several tracking algorithms in both optical
and infrared modalities. Despite the advances in the
counter-UAV domain and the available data sets, this
study represents the first time UAV Re-ID has been in-
vestigated. We believe this is a crucial task for future
vision-based counter-UAV systems, which are both
passive in nature and, of course, afford visual con-
firmation of acquired UAV targets.
3 DEEP NEURAL NETWORK
ARCHITECTURES
We present an overview of the deep learning archi-
tectures considered within this work in terms of both
their underlying convolutional neural network back-
bone and the loss function that they employ for weight
optimisation.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
138
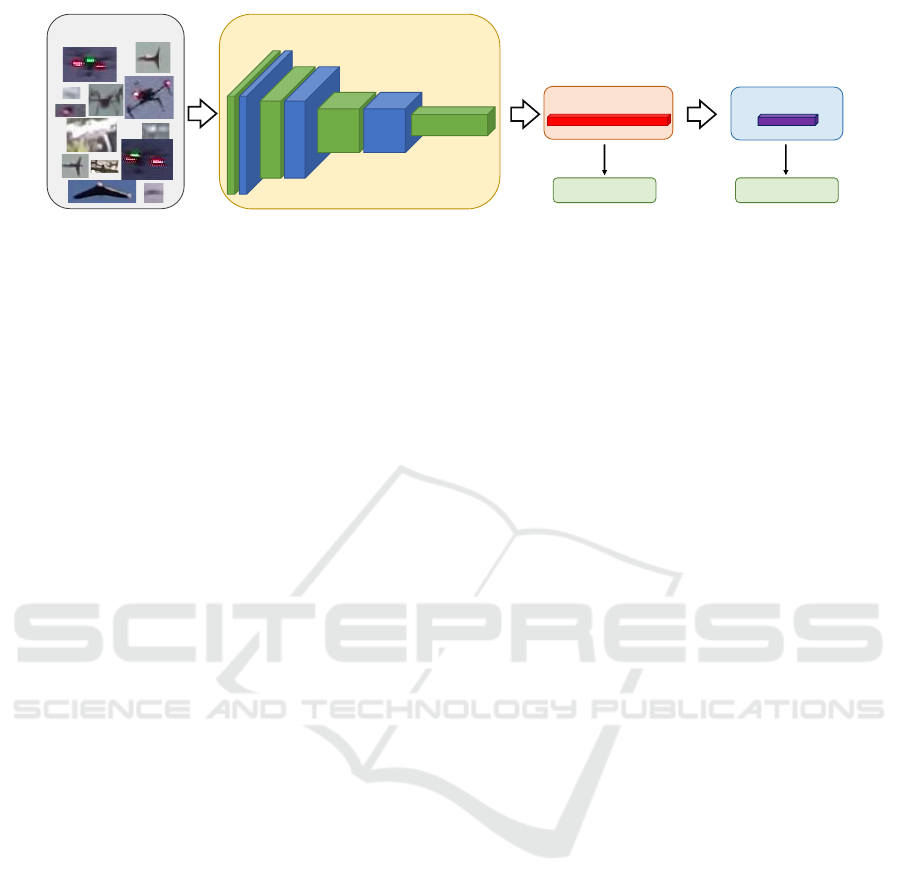
Feature Representation
Softmax Output
Triplet Loss Cross-Entropy Loss
Backbone Network
Input Data
Figure 2: An overview of the pipeline for all of our experiments. Input data from the proposed UAV-ReID data set is processed
by the given backbone network to obtain a feature representation. This feature representation is used in the triplet loss, and
also goes through a softmax classification layer to be used in the cross-entropy loss. The backbone networks we evaluate are
presented in Section 3.1.
3.1 Network Backbones
Deep neural networks (DNN) are machine learning
systems that use multiple layers of non-linear compu-
tation to model the complicated relationship between
the input and output of a problem. Convolutional neu-
ral networks (CNN) are particularly suited for image-
based object identification and tracking in computer
vision applications. Firstly, CNNs can capture object
features irrespective of their spatial locations on an
image, due to the shift-invariance of convolution ker-
nels. Secondly, modern CNNs can detect objects of
complex shapes, sizes, and appearance by stacking
multiple convolution kernels to learn powerful fea-
ture representations. We describe a selection of state-
of-the-art CNNs and generic Re-ID frameworks that
we evaluate for UAV Re-ID. Our overall framework
is shown in Figure 2.
ResNet: Residual neural networks (He et al., 2016)
are a popular variant of CNNs that connect adjacent
layers of a network (residuals) with an identity map-
ping. Learning residuals enables training significantly
deeper architectures to obtain more powerful features.
In our experiments, we use the 18-layer, 34-layer, and
50-layer configurations.
SE-ResNet: ResNets are powerful but can still be im-
proved by learning and re-weighting the hidden con-
volutional feature maps using attention. The popu-
lar Squeeze-Excitation (SE) network (Hu et al., 2018)
introduces a channel attention mechanism to identify
and appropriately weight important feature maps.
SE-ResNeXt: Another line of improvement for
ResNet is ResNeXt (Xie et al., 2017), which main-
tains the identity skip connection while splitting the
feature mapping of each layer into multiple branches.
This increased dimension of network representation
power has shown to be more effective for image
recognition and object detection.
ViT: Transformers have recently become ubiquitous
in natural language processing. Motivated by this,
Dosovitskiy et al. (Dosovitskiy et al., 2021) migrated
transformers into computer vision to propose Vision
Transformers (ViT). This architecture learns the re-
lationship among all image patches for downstream
tasks. We evaluate ViT with image patches of size
16 × 16 with the ‘small’ (8-layer) and ‘base’ (12-
layer) configurations.
ResNet50-mid: A common practice of image repre-
sentation learning in computer vision is to take hid-
den features from the penultimate CNN layer as im-
age embeddings. Yu et al. (Yu et al., 2017) explore
fusing embeddings from earlier layers to improve the
performance of cross-domain image matching. Fus-
ing representations from different layers has proven
successful for other computer vision tasks on small
objects (Liu et al., 2020a), highlighting its potential
within UAV Re-ID systems.
OSNet: There have also been CNN architectures
specifically designed for object Re-ID. Zhou et al.
(Zhou et al., 2019) propose an omni-scale network,
which improves Re-ID performance by learning to
fuse features of multiple scales within a residual con-
volutional block. Each stream in the block corre-
sponds to one scale to learn and the outputs of all
streams are dynamically combined to create omni-
scale features. Considering the expansive array of
scales at which UAV can appear, OSNet is well-suited
to the UAV Re-ID challenge.
MLFN: Multi-level Factorisation Network (Chang
et al., 2018) is similar to OSNet in that it tries to
capture discriminative and view-invariant features at
multiple semantic levels. Unlike OSNet however, it
composes multiple computational blocks, each con-
taining multiple factor modules and a selection gate
to dynamically choose the best module to represent
the input.
PCB: Different from holistic feature learning, Sun et
al. (Sun et al., 2018) propose a parts-based convo-
lutional baseline (PCB), which uniformly splits each
input image into multiple parts. As the appearance
consistency within each part is usually stronger than
between parts, it proves easier to learn more robust
UAV-ReID: A Benchmark on Unmanned Aerial Vehicle Re-identification in Video Imagery
139

and discriminative features for person Re-ID. A part
pooling module is added to deal with outliers.
HACNN: Li et al. (Li et al., 2018) propose a harmo-
nious attention network, which tackles the challenge
of matching persons across unconstrained images that
are potentially not aligned. HACNN uses layers that
incorporate hard attention, spatial attention and chan-
nel attention to improve person Re-ID performance
on unconstrained images. We reformulate this system
towards re-identification of UAV objects to thus en-
able evaluation of its performance within the counter-
UAV domain
The N3D-ReID Framework: The use of Re-ID best
practices (Luo et al., 2019) alongside simple networks
have been demonstrated to be a suitable replacement
for more complex Re-ID networks, as identified by
the Not 3D Re-ID Framework (Breckon and Alse-
haim, 2021) (N3D-ReID). By introducing a Batch
Normalisation Neck between the deep backbone net-
work and a multi-loss function explained in Section
3.2, the authors were able to achieve state of the art re-
sults within the person Re-ID domain. Moreover, they
utilize an additional backbone architecture denoted
ResNet50-IBN-a (Pan et al., 2018), which introduces
both batch normalisation (Ioffe and Szegedy, 2015)
and instance normalisation (Ulyanov et al., 2017) into
the backbone architecture itself. As such, we fur-
ther evaluate the performance of ResNet50-IBN-a and
the backbone architectures outlined in Section 3.1
within this separate re-identification framework in ad-
dition to that illustrated in Figure 2. All implementa-
tion details remain unchanged from the original paper
(Breckon and Alsehaim, 2021).
3.2 Loss Functions
In order to perform learning via weight optimisation
across the specified deep neural network architecture,
a loss function denoting relative network weight per-
formance on the specified task is minimised via com-
putational optimisation with corresponding weight
updates via backpropagation. We detail a number of
such loss functions which are considered within this
study for the application of UAV Re-ID.
Cross-Entropy Loss: The cross-entropy (CE) loss
function is the standard loss that is used in most ma-
chine learning classification tasks. The negative log-
likelihood between the true class labels and predicted
class labels is minimised:
L
CE
= −
∑
x∈X
y
x
log f (x; θ), (1)
where a network f with parameters θ predicts the
class of an input x with a true class index y
x
.
Triplet Loss: The triplet loss is a metric learning
technique that decreases the distance between positive
pairs of images and increases the distance of negative
pairs. Metric learning is commonly used in applica-
tions such as verification and Re-ID, where there are
many classes and few instances per classes. Because
of the lack of class-specific data, the network cannot
reliably learn class-specific information. The network
instead learns to place images onto a manifold with
similar images placed close to one another.
We denote a triplet, t = (x, x
+
, x
−
), where x is the
query image, x
+
is an image of the same object, and
x
−
is an image of a different object. The triplet loss
function is formulated as follows:
L
triplet
=
∑
t∈T
max((|| f
∗
(x;θ) − f
∗
(x
+
;θ)||
2
− || f
∗
(x;θ) − f
∗
(x
−
;θ)||
2
+ α), 0),
(2)
where T is the set of mined triplets, || · ||
2
is the
Euclidean distance, and the feature representation
f
∗
(x;θ) is obtained by passing input x through net-
work f with parameters θ, and taking the representa-
tion before the softmax classification layer. Negative
images are pushed away from positive images by a
margin of α.
Triplets need to be sufficiently difficult in order
to improve the performance of the model (Hermans
et al., 2017). We employ hard negative mining to
each query image in the batch. This means that within
each iteration, the most difficult negative samples are
considered and processed by the loss function. In
turn, these samples maximise how much is learnt dur-
ing backpropagation. Given a query image q, the
hardest negative image in the gallery is found via
min|| f
∗
(q)− f
∗
(g
i
)||
2
, where g
i
, i ∈ {1, . . . , B} are the
gallery images, B is the batch size, and ||·||
2
is the Eu-
clidean distance.
Combined Loss: In many Re-ID works, combining
the two losses can lead to performance gains (Luo
et al., 2019). We test this setting for UAVs where both
losses receive equal weight:
L = L
CE
+ L
triplet
. (3)
Multi-loss: Following the success of N3D-ReID
(Breckon and Alsehaim, 2021), we further evalu-
ate the performance of a multi-loss function that
has demonstrated superior performance to more well-
established loss functions within the person Re-ID
domain. This loss is formulated as a weighted sum
across cross-entropy loss, L
ID
, ranked list loss, L
RLL
,
centre loss, L
centre
, and erasing-attention loss, L
E att
,
as follows:
L = L
ID
+ L
RLL
+ β · L
centre
+ L
E att
. (4)
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
140

Query
Rank
1
2
3
4 5
Figure 3: Examples from ViT with a combined loss on Big-
to-Small. A green box indicates a correct Re-ID. ViT can
extract salient features from very low-resolution images to
match UAVs across scale.
As such, all losses receive equal weighting other
than centre loss which serves to support L
RLL
, and
thus receive weight β. We define L
ID
as cross-entropy
loss with additional Label Smoothing (Szegedy et al.,
2016). L
RLL
can be considered a direct alternative to
triplet loss, and learns a hypersphere for each class
additionally to triplet loss behaviour. Learning the hy-
persphere helps avoid intra-class data distribution that
might be apparent within triplet loss, and particularly
impactful when training with limited data. Finally,
L
E att
introduces additional attention to image sam-
ples that receive erasing under random erasing aug-
mentation (Zhong et al., 2020) such that its impact
is increased, as implemented in (Breckon and Alse-
haim, 2021; Pathak et al., 2020). This is particularly
important when data availability is constrained so the
effects of over-fitting are minimised during training;
learning will be maximised from features extracted
from erasing-augmented images that are less likely to
contribute to UAV regions.
4 UAV Re-ID DATASET
We present our dataset for the UAV Re-ID task and
corresponding experimental setup.
4.1 Data
UAV-reID is designed to evaluate two practical ap-
plications of Re-ID. All data set instances are con-
structed via sampling from 61 UAV videos. UAVs
are cropped from single frames of these videos de-
pending on the specific challenge. UAV images are
then resized to size 224 × 224 Images are augmented
via random flipping, random cropping, and random
erasing (Zhong et al., 2020). Similar to early person
Re-ID data sets, we include two images per identity
for each setting. Across both challenges, our dataset
contains 61 UAV identities and 244 UAV images.
We use 30 identities for training and the remaining
31 identities for testing. Our code can be found at
https://github.com/danielorganisciak/UAVReID.
4.2 Challenges
Temporally-Near: Given a UAV video with t frames,
we consider UAVs in frames
t
5
and
2t
5
. This temporal
distance is close enough that UAVs remain at a sim-
ilar size in most cases, but far enough for UAVs to
appear from a different viewpoint. This simulates the
task that a Re-ID module embedded within a tracking
framework must perform, whereby UAVs undergo a
limited transformation.
Big-to-Small: We obtain the largest and smallest
UAV detections across the whole video. This simu-
lates the task of matching known UAVs (for which
we have rich visual information) with UAVs detected
from a long distance. As such, we can identify the
far-off UAV, and whether it poses a potential threat.
4.3 Evaluation Protocol
We use the standard mean average precision (mAP),
and rank based metrics to evaluate the selected state-
of-the-art methods. The test set is split into a query
set and a gallery set, with 31 identities each. Given a
query image, q, the Re-ID framework ranks all gallery
images, g
i
in order of likelihood that g
i
= q, i.e. they
contain the same UAV.
The rank-r matching rate is the percentage of
query images with a positive gallery image within the
highest r ranks. The precision at rank r, P
r
, compares
the number of true positives (TP) with the total num-
ber of positives in the top r ranks:
P
r
=
TP
TP+FP
, (5)
where FP is the number of false positives. As we only
have one gallery image per query image, the mAP is
calculated via
mAP =
1
Q
Q
∑
q=1
1
r
q
, (6)
where the correct identity of q is found at rank r
q
, and
Q is the total number of query images.
All experiments were performed using the
torchreid framework (Zhou and Xiang, 2019) on an
NVIDIA RTX 2080 Ti GPU. All backbones were pre-
trained on ImageNet.
UAV-ReID: A Benchmark on Unmanned Aerial Vehicle Re-identification in Video Imagery
141

Table 1: Methods Tested on the ‘Temporally-Near’ sub-challenge.
Backbone Re-ID CE Triplet CE + Triplet
mAP rank-1 rank-5 mAP rank-1 rank-5 mAP rank-1 rank-5
ResNet-18 × 81.9 77.4 77.4 72.7 61.3 74.2 71.7 58.0 77.4
ResNet-34 × 77.1 70.1 74.2 74.6 71.0 71.0 74.4 61.3 83.9
ResNet-50 × 75.9 71.0 71.0 75.5 71.0 71.0 76.7 67.7 77.4
SE-ResNet-50 × 77.1 71.0 80.6 74.1 67.7 74.2 79.4 74.2 80.6
SE-ResNeXt-50 × 75.8 71.0 77.4 66.8 61.3 64.5 76.2 74.2 74.2
ViT Small × 75.6 67.7 74.2 74.1 64.5 74.2 75.6 64.5 74.2
ViT Base × 79.2 74.2 77.4 73.2 67.7 74.2 81.3 77.4 80.6
ResNet50mid X 78.0 71.0 87.1 74.0 67.7 74.2 76.1 67.7 77.4
OSNet X 71.0 61.3 70.1 73.8 67.7 71.0 75.7 71.0 71.0
MLFN X 69.9 61.3 71.0 73.4 67.7 67.7 65.7 58.1 61.3
PCB X 80.8 74.2 87.1 73.2 67.7 67.7 81.4 77.4 80.6
HACNN X 72.1 64.5 71.0 77.7 71.0 77.4 74.5 64.5 77.4
Bold denotes the highest values in the table, red denotes the highest in each column, blue denotes the second highest in each column.
Table 2: Methods Tested on the ‘Big-to-Small’ sub-challenge.
Backbone Re-ID CE Triplet CE + Triplet
mAP rank-1 rank-5 mAP rank-1 rank-5 mAP rank-1 rank-5
ResNet-18 × 40.3 32.3 41.9 36.9 25.8 32.3 37.5 25.8 32.3
ResNet-34 × 33.7 22.6 29.0 37.9 29.0 35.5 38.8 25.8 35.5
ResNet-50 × 37.8 22.6 51.6 39.0 29.0 35.5 42.9 29.0 35.5
SE-ResNet-50 × 38.0 25.8 51.6 42.5 29.0 45.0 41.4 29.0 38.7
SE-ResNeXt-50 × 40.0 29.0 35.5 31.9 16.1 29.0 38.8 29.0 32.3
ViT Small × 43.1 35.5 35.5 39.0 22.6 41.9 40.9 29.0 38.7
ViT Base × 40.5 29.0 54.8 36.9 22.6 32.3 46.5 35.5 45.2
ResNet50mid X 38.4 25.8 51.6 42.3 32.3 32.3 43.2 32.3 38.7
OSNet X 38.0 25.8 35.5 34.5 19.4 35.5 33.2 19.4 32.3
MLFN X 38.1 22.5 38.7 36.8 25.8 32.3 33.9 22.6 25.8
PCB X 41.3 32.3 35.5 43.7 32.3 41.9 38.2 25.8 32.3
HACNN X 36.0 19.4 45.2 39.4 25.8 32.3 41.2 25.8 41.9
Bold denotes the highest values in the table, red denotes the highest in each column, blue denotes the second highest in each column
5 EVALUATION
We conduct an extensive benchmark evaluation
over both the Temporally-Near and Big-to-Small re-
identification challenges.
5.1 Results
Results on the ‘Temporally-Near’ and ‘Big-to-Small’
sub-challenge dataset splits can be found in Table
1 and 2, respectively. ViT Base with CE+Triplet
loss comprehensively outperforms all other methods
on the Big-to-Small sub-challenge, and has fourth
highest mAP on the Temporally-Near sub-challenge.
From Figure 3, rows two and three, we observe that
ViT returns a similar ranking list on query UAVs that
have different colour. It follows that ViT is captur-
ing shape information as well as colour, which we
hypothesise is due to its global self-attention mech-
anism, yielding superior performance compared to
convolutional methods that rely on a local receptive
field. This is in-keeping with the results of (Isaac-
Medina et al., 2021), which corroborates the suit-
ability of transformer networks towards detecting and
identifying small objects such as drones. Similar to
ViT, PCB also splits the input image into parts and
obtains good performance across both tasks. This in-
dicates that a part-based strategy can be effective for
UAV Re-ID.
As expected, Big-to-Small is more challenging
than Temporally-Near due to the extreme variation
in scale. The best rank-1 matching rate of 77.4%
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
142

Table 3: Methods Tested Using the N3D-ReID framework (Breckon and Alsehaim, 2021)
Backbone Temporally-Near Big-to-Small
mAP rank-1 rank-5 mAP rank-1 rank-5
ResNet-18 74.3 67.7 71.0 36.4 25.8 29.0
ResNet-34 70.1 64.5 67.7 37.8 29.0 32.3
ResNet-50 79.5 74.2 77.4 38.5 29.0 32.3
SE-ResNet-50 72.1 64.5 71.0 40.2 32.3 35.5
SE-ResNeXt-50 72.0 67.7 67.7 39.4 29.0 35.5
ViT Small 79.2 71.0 77.4 39.6 29.0 32.3
ViT Base 77.0 71.0 77.4 41.6 29.0 38.7
ResNet50mid 78.7 71.0 77.4 45.6 35.5 41.9
OSNet 81.5 77.4 80.7 35.2 22.6 29.0
MLFN 74.3 67.7 71.0 40.8 32.3 41.9
PCB 80.5 74.2 80.7 39.3 29.0 32.3
HACNN 74.1 67.7 74.2 41.6 32.3 35.5
IBN-A 72.0 64.5 67.7 41.9 32.3 35.5
Red denotes the (joint) highest in each column, blue denotes the (joint) second highest in each column
from generic architectures such as ResNet-18 and ViT
is a strong baseline under the Temporally-Near sub-
challenge. For real-world tracking systems, Re-ID is
performed with only a few possible matches, rather
than the entire test data set. These methods should
therefore be sufficiently strong to be immediately em-
ployed within real-world systems.
In contrast, Big-to-Small has top rank-1 and rank-
5 matching rates of just 35.5% and 54.8%, respec-
tively. We can attribute the difficulty of the challenge
to the reduced colour and structure detail available to
networks at a small scale, limiting the number of a dif-
ferentiating features to identify. While colour exists,
‘blocky’ compression artifacts are much more preva-
lent and there is very little variation across the im-
age. As such, networks must be capable of identify-
ing UAV from low-quality shape information, which
only a few networks are capable of doing at this scale.
Although ViT demonstrates potential in this regard,
this sub-challenge requires further research to develop
UAV-specific architectures sufficiently robust to scale
and pose, and thus able to identify far away UAV.
The networks specific to Re-ID generally do not
perform as well as generic networks. One reason for
this is that extensive hyperparameter tuning is per-
formed on generic networks to maximise classifica-
tion performance on ImageNet, with a huge variety of
objects seen. ReID-specific networks, although pre-
trained on ImageNet, tune hyperparameters to max-
imise performance on person Re-ID data sets. Hav-
ing specialised on humans, they have less functional
ability to be transferred to different objects. However,
PCB, which uses a ResNet-50 backbone (optimised
for ImageNet), does still attain strong performance.
In almost all cases, cross-entropy loss perfor-
mance exceeds triplet loss. Further, the combined loss
is occasionally unable to yield higher performance
than cross-entropy alone. It is a common occurrence
however, that triplet loss performance improves as
the number of classes within the data set increases.
Furthermore, because UAV-reID only allows one-to-
one matching, we cannot harness the power of hard-
positive mining. We expect that triplet loss will gen-
erate better results, and perhaps exceed cross-entropy,
when a more comprehensive data set is made avail-
able.
The results from the Not-3D Re-ID framework
(Table 3) corroborate our findings. Indeed, the addi-
tional loss functions incorporated into one multi-loss
aggregation function are generally unable to improve
results, but instead offer comparable results (+/-1%)
over the earlier loss formulations (Table 1, 2). This
is again perhaps attributable to the lack of effective
hard-positive mining and few available classes. We
can once again conclude that complex state-of-the-
art person re-identification networks are less suited
to UAV re-identification than shallower, simpler net-
works. In this regard, we can firstly observe that the
IBN-A network does not out-perform the other net-
works in either challenge. The mAP performance of
IBN-A under the temporally-near challenge (72.0%)
is significantly inferior to other backbone architec-
tures. Secondly, the N3D-ReID framework is only
able to improve upon ResNet50 (79.5% mAP over
76.7% mAP) and ViT Small (79.% mAP over 75.6%
mAP) generic re-identification networks. However,
N3D-ReID yields consistently stronger results for the
Re-ID specific networks under the Temporally-Near
challenge, with the exception of HACNN (74.1%
mAP compared to 77.7% mAP).
UAV-ReID: A Benchmark on Unmanned Aerial Vehicle Re-identification in Video Imagery
143

Figure 4: Attention visualisation of the transformer mech-
anism within ViT on the Big-to-Small setting. Attention
from four different heads of the CLS token is presented.
Different attention heads attend to different parts of the im-
age, forming a more robust feature representation.
Overall, OSNET performs the strongest with the
N3D-ReID configuration, achieving 81.5%. How-
ever, this does not improve upon ResNet-18 with
just cross entropy loss (81.9%, Table 1). Any
improvements upon the Big-to-Small challenge re-
sults are similarly negligible when employing N3D-
ReID. ResNet50mid generates the highest mAP of
45.6% in this regard, less than that of ViT Base,
46.5%, when using a combination of only cross en-
tropy and triplet loss. Nevertheless, the results are
further indicative that networks that achieve good
results on the Temporally-Near challenge are not
necessarily well-suited for the Big-to-Small chal-
lenge; the best performing networks under the N3D-
ReID framework for Temporally-Near (OSNet, PCB,
ResNet50) are disjoint from those suited to Big-to-
Small (ResNet50mid, ViT Base, MLFN).
5.2 Interpreting Vision Transformers
Across all experiments, ViT attains the highest per-
formance on the Big-to-Small challenge with 46.5%
mAP. We visualise the attention maps to get a better
understanding of how they achieve this. Figure 4 is
a visualisation of four different attention heads of the
CLS token.
The first attention map attends to the entire UAV,
the second attends to its legs, the third to the pro-
pellers and the top of the UAV. This demonstrates
clearly how it is encoding features and what the final
feature representation consists of. The fourth atten-
tion map isolates the background. Even though the
background is complicated, the attention head identi-
fies that the drone is the foreground object, and con-
siders the clouds and the trees together. This gives
confidence that ViT has a good understanding of the
image, and that the feature representation is com-
posed in a structurally sound manner.
Figure 5 visualises attention from a specific im-
age patch, indicated via the yellow box. On the left,
the query patch occurs on the UAV, and the resulting
attention strongly segments the UAV from the back-
ground. On the right, the query patch occurs on one
of the propellers, and the attention head attends to
each of the other propellers. One of the advantages
Figure 5: Attention visualisation of the transformer mech-
anism within ViT on the Big-to-Small setting. The query
patch is indicated by a yellow square.
of transformers over traditional convolution is their
ability to learn non-local relationships between im-
age patches to obtain a stronger feature representa-
tion. These visualisations demonstrate this process in
action.
6 CONCLUSIONS
We have proposed the challenge of UAV re-
identification and performed a benchmark study to
examine the effectiveness of a variety of deep learn-
ing techniques. Vision transformers trained with a
combined cross-entropy and triplet loss attain strong
performance across both tasks, achieving the highest
mAP on the Big-to-Small challenge and the 4th high-
est mAP on the Temporally-Near setting. A range of
methods can re-identify UAVs over a short time pe-
riod with high precision. Of these methods, ResNet-
18 (mAP 81.9 %) appears to be easiest to fit into track-
ing frameworks due to its high performance and rela-
tively small model size.
Although the Big-to-Small data set split is very
challenging, vision transformers have shown great
promise with respect to handling extreme scale trans-
formation. We can attribute this behaviour to their
superior performance over other architectures due to
their ability to learn relationships between distant im-
age patches.
There is clear motivation for future work. A large
multi-view UAV Re-ID data set with more instance
classes would be beneficial to get the full potential out
of deep networks and multiple loss functions. Based
on its success in this benchmark, we also wish to de-
velop an improved vision transformer by incorporat-
ing techniques used in convolutional neural networks
to handle scale changes, such as concatenating out-
puts from different layers. Nevertheless, our work
establishes a clear baseline for UAV re-identification
performance, of which the benefits are evident within
potential UAV tracking frameworks.
ACKNOWLEDGEMENTS
This work is funded in part by the Future Avia-
tion Security Solutions (FASS) programme, a joint
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
144

initiative between DfT and the Home Office (Ref:
007CD). This work is made possible by the WOS-
DETC dataset.
REFERENCES
Bergmann, P., Meinhardt, T., and Leal-Taixe, L. (2019).
Tracking without bells and whistles. In 2019
IEEE/CVF International Conference on Computer Vi-
sion, pages 941–951. IEEE.
Breckon, T. and Alsehaim, A. (2021). Not 3d re-id: Sim-
ple single stream 2d convolution for robust video re-
identification. In 2020 25th International Conference
on Pattern Recognition, pages 5190–5197.
Chang, X., Hospedales, T. M., and Xiang, T. (2018). Multi-
level factorisation net for person re-identification. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 2109–2118.
Cheng, D., Gong, Y., Zhou, S., Wang, J., and Zheng,
N. (2016). Person re-identification by multi-channel
parts-based cnn with improved triplet loss function.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 1335–1344.
Coluccia, A., Fascista, A., Schumann, A., Sommer, L.,
Ghenescu, M., Piatrik, T., De Cubber, G., Nalamati,
M., Kapoor, A., Saqib, M., et al. (2019). Drone-
vs-bird detection challenge at ieee avss2019. In
2019 16th IEEE International Conference on Ad-
vanced Video and Signal Based Surveillance, pages
1–7. IEEE.
Craye, C. and Ardjoune, S. (2019). Spatio-temporal seman-
tic segmentation for drone detection. In 2019 16th
IEEE International conference on advanced video and
signal based surveillance, pages 1–5. IEEE.
Deng, J., Khokhar, M. S., Aftab, M. U., Cai, J., Kumar,
R., Kumar, J., et al. (2021). Trends in vehicle re-
identification past, present, and future: A comprehen-
sive review. arXiv preprint arXiv:2102.09744.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., Uszkoreit, J., and Houlsby,
N. (2021). An image is worth 16x16 words: Trans-
formers for image recognition at scale. In Interna-
tional Conference on Learning Representations.
Fu, Y., Wei, Y., Zhou, Y., Shi, H., Huang, G., Wang, X.,
Yao, Z., and Huang, T. (2019). Horizontal pyramid
matching for person re-identification. In Proceedings
of the AAAI Conference on Artificial Intelligence, vol-
ume 33, pages 8295–8302.
Gaszczak, A., Breckon, T., and Han, J. (2011). Real-time
people and vehicle detection from UAV imagery. In
Proc. SPIE Conference Intelligent Robots and Com-
puter Vision XXVIII: Algorithms and Techniques, vol-
ume 7878.
G
¨
okstorp, S. and Breckon, T. (2021). Temporal and
non-temporal contextual saliency analysis for general-
ized wide-area search within unmanned aerial vehicle
(uav) video. The Visual Computer. to appear.
Grigorev, A., Tian, Z., Rho, S., Xiong, J., Liu, S., and Jiang,
F. (2019). Deep person re-identification in UAV im-
ages. EURASIP Journal on Advances in Signal Pro-
cessing, 2019(1):54.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hermans, A., Beyer, L., and Leibe, B. (2017). In defense
of the triplet loss for person re-identification. arXiv
preprint arXiv:1703.07737.
Hoffer, E. and Ailon, N. (2015). Deep metric learn-
ing using triplet network. In International workshop
on similarity-based pattern recognition, pages 84–92.
Springer.
Hu, J., Shen, L., and Sun, G. (2018). Squeeze-and-
excitation networks. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 7132–7141.
Ioffe, S. and Szegedy, C. (2015). Batch normalization: Ac-
celerating deep network training by reducing inter-
nal covariate shift. In Proceedings of the 32nd In-
ternational Conference on International Conference
on Machine Learning - Volume 37, ICML’15, page
448–456. JMLR.org.
Isaac-Medina, B. K. S., Poyser, M., Organisciak, D., Will-
cocks, C. G., Breckon, T. P., and Shum, H. P. H.
(2021). Unmanned aerial vehicle visual detection and
tracking using deep neural networks: A performance
benchmark.
Jiang, N., Wang, K., Peng, X., Yu, X., Wang, Q., Xing, J.,
Li, G., Zhao, J., Guo, G., and Han, Z. (2021). Anti-
UAV: A large multi-modal benchmark for UAV track-
ing.
Karanam, S., Gou, M., Wu, Z., Rates-Borras, A., Camps,
O., and Radke, R. J. (2019). A systematic evaluation
and benchmark for person re-identification: Features,
metrics, and datasets. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 41(3):523–536.
Kuhn, H. (2012). The hungarian method for the assignment
problem. Naval Research Logistic Quarterly, 2.
Kuma, R., Weill, E., Aghdasi, F., and Sriram, P. (2019).
Vehicle re-identification: an efficient baseline using
triplet embedding. In 2019 International Joint Con-
ference on Neural Networks, pages 1–9. IEEE.
Li, W., Zhu, X., and Gong, S. (2018). Harmonious attention
network for person re-identification. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 2285–2294.
Li, Y., Fu, C., Ding, F., Huang, Z., and Lu, G. (2020). Auto-
track: Towards high-performance visual tracking for
UAV with automatic spatio-temporal regularization.
In Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition.
Liu, L., Ouyang, W., Wang, X., Fieguth, P., Chen, J., Liu,
X., and Pietik
¨
ainen, M. (2020a). Deep learning for
generic object detection: A survey. International jour-
nal of computer vision, 128(2):261–318.
Liu, M., Wang, X., Zhou, A., Fu, X., Ma, Y., and Piao,
C. (2020b). Uav-yolo: Small object detection on un-
UAV-ReID: A Benchmark on Unmanned Aerial Vehicle Re-identification in Video Imagery
145

manned aerial vehicle perspective. Sensors (Basel),
20(8):2238.
Luo, H., Gu, Y., Liao, X., Lai, S., and Jiang, W. (2019).
Bag of tricks and a strong baseline for deep person re-
identification. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
Workshops, pages 0–0.
Lyu, Y., Vosselman, G., Xia, G.-S., Yilmaz, A., and Yang,
M. Y. (2020). UAVid: A semantic segmentation
dataset for UAV imagery. ISPRS Journal of Pho-
togrammetry and Remote Sensing, 165:108–119.
Meng, D., Li, L., Liu, X., Li, Y., Yang, S., Zha, Z.-J.,
Gao, X., Wang, S., and Huang, Q. (2020). Parsing-
based view-aware embedding network for vehicle re-
identification. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 7103–7112.
Opromolla, R., Inchingolo, G., and Fasano, G. (2019).
Airborne visual detection and tracking of cooperative
uavs exploiting deep learning. Sensors, 19(19).
Organisciak, D., Sakkos, D., Ho, E. S., Aslam, N., and
Shum, H. P. H. (2020). Unifying person and vehicle
re-identification. IEEE Access, 8:115673–115684.
Pan, X., Luo, P., Shi, J., and Tang, X. (2018). Two at once:
Enhancing learning and generalization capacities via
ibn-net. In European Conference on Computer Vision.
Pathak, P., Eshratifar, A. E., and Gormish, M. (2020).
Video person re-id: Fantastic techniques and where
to find them (student abstract). In Proceedings of
the AAAI Conference on Artificial Intelligence, vol-
ume 34, pages 13893–13894.
Sokalski, J., Breckon, T., and Cowling, I. (2010). Automatic
salient object detection in UAV imagery. In Proc. 25th
Int. Conf. on Unmanned Air Vehicle Systems, pages
11.1–11.12.
Sun, Y., Zheng, L., Yang, Y., Tian, Q., and Wang, S. (2018).
Beyond part models: Person retrieval with refined part
pooling (and a strong convolutional baseline). In Pro-
ceedings of the European conference on computer vi-
sion, pages 480–496.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wojna,
Z. (2016). Rethinking the inception architecture for
computer vision. 2016 IEEE Conference on Computer
Vision and Pattern Recognition, pages 2818–2826.
Teng, S., Zhang, S., Huang, Q., and Sebe, N. (2021).
Viewpoint and scale consistency reinforcement for
UAV vehicle re-identification. International Journal
of Computer Vision, 129(3):719–735.
Ulyanov, D., Vedaldi, A., and Lempitsky, V. (2017). Im-
proved texture networks: Maximizing quality and di-
versity in feed-forward stylization and texture synthe-
sis. 2017 IEEE Conference on Computer Vision and
Pattern Recognition, pages 4105–4113.
Wen, Y., Zhang, K., Li, Z., and Qiao, Y. (2016). A discrim-
inative feature learning approach for deep face recog-
nition. In European conference on computer vision,
pages 499–515. Springer.
Wojke, N., Bewley, A., and Paulus, D. (2017). Simple on-
line and realtime tracking with a deep association met-
ric. In 2017 IEEE International Conference on Image
Processing, pages 3645–3649.
Xie, S., Girshick, R., Doll
´
ar, P., Tu, Z., and He, K. (2017).
Aggregated residual transformations for deep neural
networks. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 1492–
1500.
Ye, M., Shen, J., Lin, G., Xiang, T., Shao, L., and Hoi, S. C.
(2021). Deep learning for person re-identification: A
survey and outlook. IEEE Transactions on Pattern
Analysis and Machine Intelligence.
Yu, Q., Chang, X., Song, Y.-Z., Xiang, T., and Hospedales,
T. M. (2017). The devil is in the middle: Exploiting
mid-level representations for cross-domain instance
matching. arXiv preprint arXiv:1711.08106.
Zhang, S., Zhang, Q., Yang, Y., Wei, X., Wang, P., Jiao,
B., and Zhang, Y. (2021). Person re-identification
in aerial imagery. IEEE Transactions on Multimedia,
23:281–291.
Zheng, L., Bie, Z., Sun, Y., Wang, J., Su, C., Wang, S.,
and Tian, Q. (2016). Mars: A video benchmark for
large-scale person re-identification. In European Con-
ference on Computer Vision. Springer.
Zhong, Z., Zheng, L., Kang, G., Li, S., and Yang, Y. (2020).
Random erasing data augmentation. In Proceedings
of the AAAI Conference on Artificial Intelligence, vol-
ume 34, pages 13001–13008.
Zhou, K. and Xiang, T. (2019). Torchreid: A library
for deep learning person re-identification in pytorch.
arXiv preprint arXiv:1910.10093.
Zhou, K., Yang, Y., Cavallaro, A., and Xiang, T.
(2019). Omni-scale feature learning for person re-
identification. In Proceedings of the IEEE/CVF In-
ternational Conference on Computer Vision, pages
3702–3712.
Zhou, Y. and Shao, L. (2018). Aware attentive multi-view
inference for vehicle re-identification. In Proceedings
of the IEEE conference on computer vision and pat-
tern recognition, pages 6489–6498.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
146
