
A Mechatronics-twin Framework based on Stewart Platform for
Effective Exploration of Operational Behaviors of Prosthetic Sockets
with Amputees
Dejiu Chen
a
, Suranjan Ram Ottikkutti
b
and Kaveh Nazem Tahmasebi
c
Unit of Mechatronics and Embedded Control Systems, KTH Royal Institute of Technology, 10044 Stockholm, Sweden
Keywords:
Mechatronics-twin, Stewart Manipulator, Transfemoral Amputee, Prosthetics, Human-in-the-Loop,
Cyber-physical System, Biomechanical Modeling, Force-control.
Abstract:
A Stewart platform is a six-degree-of-freedom parallel manipulator widely used as the motion base for
flight simulators, antenna positioning systems, machine tool technology, etc. This work presents a novel
mechatronics-twin framework that integrates such a manipulator with advanced biomechanical models and
simulations for effective exploration of operational behaviors of prosthetic sockets with amputees. By means
of the biomechanical models and simulations, the framework allows the users to first analyze the fundamental
operational characteristics of individual amputees according to their specific body geometries, pelvis-femur
structures, sizes of transfemoral sockets, etc. Such operational characteristics are then fed to one Stewart plat-
form as the reference control signals for the generation of dynamic loads and behaviors of prosthetic sockets
that are otherwise difficult to observe or realize with the real amputees. Experiments in form of integration
testing show that the proposed control strategy is capable of generating expected dynamic operational condi-
tions. Currently, the mechatronics-twin framework supports a wide range of biomechanical configurations and
the quantification of the respective intra-socket load conditions for socket design optimization and anomaly
detection.
1 INTRODUCTION
Limb amputations cause serious physical disabilities
that compromise the quality of life of many people
around the globe. Limb prostheses offer a solution
to reduce the negative impact of such disabilities, at-
tempting to restore a normal functionality and am-
putee autonomy, as much as possible. It is estimated
that 90% of amputees will wear a prosthetic limb for
the rest of their lives. At present, despite some im-
portant recent advances in prosthetics, 40 to 60% of
amputees exhibit a rather low satisfaction level due to
comfort issues (Baars et al., 2018).
As a critical interface between the amputee (nat-
ural) stump and the prosthetic (artificial) device, a
suitable prosthetic socket must ensure efficient fitting,
appropriate load transmission, stability, and control.
The performance often constitutes a key factor for the
success or failure of the prosthesis itself. The opti-
mization of prosthetic sockets is however a difficult
a
https://orcid.org/0000-0001-7048-0108
b
https://orcid.org/0000-0002-0699-3889
c
https://orcid.org/0000-0002-1685-5586
task as each solution is inherently individual, while
suffering from the fact that a wide range of opera-
tional conditions can only be partially observable or
quantifiable. Such conditions are typically related to
the dynamic load distribution, stump volume fluctua-
tion and tissue evolvement, etc. For example, in cur-
rent practices, the load bearing capability of the stump
can only be checked by prosthetists using “touch and
feel” technique. The socket-related issues that are of
concern range from reduced bio-mechanical fitness,
hampered dynamic control, to poor comfort and med-
ical complications (e.g. skin lesions).
This paper presents a novel mechatronics-twin
framework that addresses the above-mentioned chal-
lenge by serving as an analytical replica for revealing
the complex operational interplay of amputee, pros-
thetic device and prosthetic socket. The overall ap-
proach is characterized by an integration of (a) virtual
behaviors based on a combination of advanced biome-
chanical modelling, simulation, and FEA (Finite Ele-
ment Analysis); and (2) physical behaviors based on
well-controlled motions of a six-degree-of-freedom
parallel manipulator referred to as Stewart platform.
74
Chen, D., Ottikkutti, S. and Tahmasebi, K.
A Mechatronics-twin Framework based on Stewart Platform for Effective Exploration of Operational Behaviors of Prosthetic Sockets with Amputees.
DOI: 10.5220/0010838600003123
In Proceedings of the 15th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2022) - Volume 1: BIODEVICES, pages 74-83
ISBN: 978-989-758-552-4; ISSN: 2184-4305
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Overview of the mechatronics-twin that allows both virtual and physical replications of prosthetic device. The virtual
replication is supported by (1) biomechanical modelling and simulation; (2) FEA; The physical replication is supported by
(3) 3-D printing and integrating; (4) physical testing by Stewart platform.
In particular, while the virtual behaviors are useful for
establishing basic understanding of fundamental bio-
mechanical operational conditions and interactions of
individual amputees, the physical behaviors allow a
refined investigation of such operational conditions
and interactions that are otherwise difficult to ob-
serve or realize with the real amputees. Moreover, the
framework also aims to constitute an important ba-
sis for successful deployment of next generation flex-
ible wearable sensors inside bionic prosthetic sockets
for real-time monitoring of dynamic load conditions.
Due to their inherent physical flexibility, such sensors
could suffer from some performance concerns, relat-
ing typically to the measurement sensitivity, inaccu-
racy and drift (Dejke et al., 2021). By generating op-
erational data with well defined fidelity, such virtual
and physical behaviors allow the training and testing
of data-driven algorithms for the sensor functions.
Currently, the mechatronics-twin framework sup-
ports a wide range of bio-mechanical configurations
and the quantification of respective dynamic opera-
tional situations including the intra-socket load con-
ditions. This is done by the following technical steps:
(1) biomechanical modelling and simulation of over-
all gait dynamics; (2) FEA for basic analysis and vir-
tualization of possible intra-socket load conditions;
(3) 3-D printing and prototyping specific test stumps
and sockets configurations for physical tests; (4) phys-
ical testing by Stewart platform with the test stumps
and sockets. An overview of this mechatronic-twin
framework can be seen in Figure 1. The rest of this
paper elaborates these technical steps. It is struc-
tured into the following sections: Section 2 discusses
related concepts and technologies in the domains of
prosthetic design, operation perception and analysis.
Section 3, 4, 5, and 6 elaborate the support for mod-
elling, simulation, prototyping and testing. The re-
sults from a case study is presented in Section 7. Fi-
nally, the conclusion is given in Section 8.
2 RELATED WORK
Transfemoral (above knee) amputation is a surgical
procedure performed to remove the lower limb above
the knee joint when that limb has been severely dam-
aged via trauma, disease, or congenital defect. Es-
sentially, the usage of prosthetic device aims to re-
store the ambulation and self-esteem of amputee to
the maximum extent. The major components of a
transfemoral prosthesis include socket, suspension,
knee joint, pylon and feet (Geng et al., 2012). Among
these prosthetic components, the socket serves as the
interface between the residual limb and the prosthe-
sis. It must protect the residual limb and appropri-
ately transmit the forces associated with standing and
ambulation.
A perception of the intra-socket load conditions
would help the prosthetists optimize the design of
prosthetic devices for improved operational fitness
and comfort. Due to the inherent complexity and
variability of human body and prosthesis operation,
such a perception would also constitute the most im-
portant basis for enabling data-driven analyses where
machine-learning and artificial intelligence methods
are employed for the modeling and exploration of
complex operational conditions. The state of the art
approaches to modern limb prosthesis are therefore
searching for an integration of mechanical, electronic,
and computing technologies to support novel sen-
sory and data analytic capabilities. This is, however,
A Mechatronics-twin Framework based on Stewart Platform for Effective Exploration of Operational Behaviors of Prosthetic Sockets with
Amputees
75
always a challenging task. Normally, direct sens-
ing of the pressure conditions is restricted by spe-
cific requirements on sensor deployment and perfor-
mance. For example, all modern pressure sensor tech-
nologies, including resistive transducer, piezoelectric
transducer, optical pressure transducer, and capac-
itive transducer (Bao., 2000), have their respective
disadvantages. For successful usage of such technolo-
gies, sensor testing and calibration become therefore
important. For the calibration of sensors, it is always
important to take the actual operational condition into
the consideration. One reason for this is that the
specific structural conditions of each individual pros-
thetic socket, relating for example to the curvature and
surface hardness, could lead to the problems of sen-
sor performance (Khodasevych et al., 2017). Differ-
ent bio-mechanical conditions and operational behav-
iors also lead to varying dynamic conditions that in
turn may interfere negatively with the sensor drift and
hysteresis, as well as other frequency response char-
acteristics (Buis and Convery, 1997). Moreover, sen-
sor re-calibration could also be necessary in order to
compensate for the drift over life cycle.
This paper presents an approach to a novel
mechatronics-twin framework for prosthetic devices
is similar to the notion of digital-twin in regard to the
replication of a physical target system on the basis
of measurements (Boschert and Rosen, 2016). The
approach addresses however in particular the chal-
lenge of complex biomechanical dynamics of pros-
thesis operation as well as the need of physical replica
for data generation and sensor calibration. Clearly,
any approaches that rely on repeated experimentation
on the amputees will not be preferable. This would
in the worst case cause further trauma to the am-
putees. Therefore, in the mechatronics-twin frame-
work, a six-degree-of-freedom parallel manipulator
referred to as SP (Stewart Platform) has been adopted
for a refinement of the digital virtual replication given
by modeling and simulation.
Since being firstly introduced in 1949, various SP
based solutions are widely used as the motion base
for antenna positioning systems, machine tool tech-
nology, flight simulators, etc. Today, there are over
1400 research articles about manipulators analysis
and design. See e.g. (Furqan et al., 2017), (Wapler
et al., 2003), (Grace et al., 1993), (Brandt et al.,
1999) and (Fichter et al., 2008). Our approach adopts
a PID (Proportional–Integral–Derivative) strategy to
the motion control of SP, with the control refer-
ence generated by biomechanical simulation and real-
time feedback from the operation of SP. Similar ap-
proaches to SP control can be found in (S¸umnu et al.,
2017) and (Rossell et al., 2015).
3 BIOMECHANICAL
MODELLING AND
SIMULATION
This technical step aims at eliciting the most fun-
damental operational characteristics of a prosthetic
device as an integral part of amputee. Within the
mechatronics-twin framework, it provides the support
for estimating the piston-forces and moments within
the amputee stump-socket assembly during walking.
Knowledge of such physical interactions is essential
for more detailed analysis of stump and prosthesis dy-
namics. All tasks are based on OpenSim, which is an
open source tool for the modeling, simulating and an-
alyzing of neuromusculoskeletal systems (Delp et al.,
2007).
The work starts with a quantification of amputee
body geometries, sizes of the pelvis-femur structure
and prosthetic socket based on a combination of mea-
surement and estimation. These geometries are not
only essential for visual representation of the bod-
ies, but are also important in the estimation of piston-
forces with inverse dynamics when combined with a
configuration of associated body masses. To achieve
a good scaling in biomechanical models, proper mea-
surement of the limbs are required to determine the
joints connecting the various bodies. The masses of
the residual limb are initially approximated by equat-
ing the volumetric density of the default healthy limb
to the residual limb. The Static Optimisation Tool of
OpenSim is then used for a further adjustment of these
masses regarding the kinematics and ground reaction
forces of test-subject. A similar approach is used
to develop a transfemoral biomechanical model in
Figure 2: A snapshot of biomechanical model and related
gait phases.
Figure 3: Positioning femur in a transfemoral socket model.
BIODEVICES 2022 - 15th International Conference on Biomedical Electronics and Devices
76

Figure 4: (a) Basic force tensors determining the intra-socket loads condition; (b) Basic configuration of an amputee leg model
integrating transfemoral socket and stump (Right Leg).
OpenSim to estimate joint torques (Mohamed, 2018).
A biomechanical model for identifying the piston-
forces of transfemoral or transtibial prosthesis within
dynamic gait cycles is then constructed with Open-
Sim as shown in Figure 2. This model includes de-
tailed stump and socket models as shown in Figure
3. The current modeling of transfemoral prosthesis
is based on a refinement of a well defined transtibial
model(Willson, 2017). In particular, numerous adap-
tations are enabled to match the requirement of esti-
mating specific piston-forces from a transfemoral am-
putee. This includes replacing the transtibial socket,
tibia pylon, remaining tibia, and with specific trans-
femoral socket and femur configurations.
During gait cycles, the piston-forces and moments
are related to the contact forces between stump and
socket as shown in Figure 4 (a). The conjunction
of all force vectors F
C
over the discrete regions of
stump surface t at each specific gait phase is equiv-
alent to the piston force F
P
and moments of the same
stump. The contact force F
C
at each region is a com-
position of normal force experienced from the pres-
sure F
N
and shear force F
S
of the same region. For the
mechatronics-twin framework, an amputee leg model,
shown in Figure 4 (b), is used to stipulate the related
multi-body parameters of particular concern. These
include:
• Interface r: representing the imaginary rigid joint
between the femur and the socket located at the
COM (Center of Mass) of the stump.
• Interface SP: representing the joint between the
socket (S) and the femur pylon (P).
The corresponding piston-forces and moments at
these interfaces are calculated according to the sim-
ulated ground reaction forces during gait cycles and
the corresponding multi-body transformation through
the Inverse Dynamics Tool of OpenSim. In Figure
5 and Figure 6, one example of the piston forces
and moments over 7 gait cycles is shown. They
are represented in terms of percentage of gait cycle.
The sampling frequency for the simulation is 100Hz.
These internal joint reaction data are then exported for
the analysis of socket-stump interface conditions (see
Section 4 below).
Figure 5: One example of piston force along X-Axis
(lateral-medial axis) of 7 consecutive gait cycles.
Figure 6: One example of rotation moment around X-Axis
(lateral-medial axis) of 7 consecutive gait cycles.
A Mechatronics-twin Framework based on Stewart Platform for Effective Exploration of Operational Behaviors of Prosthetic Sockets with
Amputees
77

4 FINITE ELEMENT ANALYSIS
OF LOAD CONDITIONS
The goal of this technical step is to provide an effec-
tive characterization of possible intra-socket load con-
ditions of concern before any further physical tests.
Within the mechatronics-twin framework, it provides
the support for establishing the virtual behaviors relat-
ing to the contact forces on stump surface, based on
the internal joint reaction data from the biomechanical
modelling and simulation. This joint reaction can be
normalized as seen in Figure 5 in an effort to identify
relationships in the gait by comparing metrics such as
standard deviation between various test subjects (Mo-
hamed, 2018). In addition, the FEA also provides
useful insights about contact forces and displacement
on the interface of stump and socket. The analysis is
based on ANSYS workbench, which is a commercial
software tool providing support for advanced FEA.
Due to the complex fine-grained interplay of related
surface conditions, modeling with conventional soft-
ware such as MATLAB Simscape multibody would be
a less preferred option. The work begins with a setup
of the FEA model by importing the geometries of the
stump, socket and femur to the DesignModeler of AN-
SYS workbench. The simulation setup also includes
defining the material properties of the various bodies
such as density, Young’s modulus and Poisson’s ratio.
The calculated internal joint reaction data by Open-
Sim are thereafter used as the inputs to the FEA soft-
ware. See Figure 7 for one example of the derived
pressure load conditions by FEA.
Figure 7: One example of average pressure load of 7 con-
secutive gait cycles (medial posterior view).
5 3D PRINTING AND
PROTOTYPING
This technical step is responsible for producing and
prototyping the femur-stump assemblies and sockets.
Within the mechatronics-twin framework, it provides
Figure 8: The shell mold casting process of silicone stump.
the physical replica of femur-stump assemblies and
prosthetic sockets for further physical testing by the
test-rig. 3D printing is used mainly due to the excel-
lent lead times. The approach also allows a geograph-
ical distribution of activities, e.g. having the patient
measurement in one region of the world and the test-
ing in anther region.
The printing and prototyping of physical replicas
use the measurements of related femurs, stump as-
semblies and sockets. In particular, a physical replica
of socket could be dimensioned by evenly extruding
the geometry of target stump by 3 millimetres ac-
cording to a widely used socket thickness (Jamaludin
et al., 2018). The design could also be based on the
scanning of a socket being used. The stump repli-
cas are produced by a shell mold casting process, for
which the shell is first created based on the geom-
etry of stump as seen in Figure 8. Similarly, a fe-
mur prototype is also generated by printing and in-
tegrated within the stump. The related design tasks
are supported by Meshmixer (Schmidt and Singh,
2010), which is a composition tool for arbitrary sur-
face meshes.
In practices, the sizes of these physical replicas
are often larger than the maximum printing volumes
of commercially available 3D printers. Under the cir-
cumstances, the parts are printed separately and as-
sembled together thereafter. By diving the process
into multiple sections, the lead time could also be also
reduced significantly.
6 PHYSICAL TESTING BY
STEWART PLATFORM
Within the mechatronics-twin framework, the phys-
ical testing by Stewart platform allows a more de-
tailed investigation of operational behaviors of pros-
thetic devices as an integral part of amputee. The goal
is also to refine, verify and validate the correspond-
ing virtual behaviors using the physical prototypes
of femur-stump assembly and prosthetic socket. The
physical test-rig consists of the prototypes of femur-
stump assembly and prosthetic socket, and a Stewart
BIODEVICES 2022 - 15th International Conference on Biomedical Electronics and Devices
78

Figure 9: The configuration of physical test-rig with femur-
stump assembly, prosthetic socket, and Stewart platform.
platform, as shown in Figure 9. Each leg of the Stew-
art platform is mounted with a load cell and a linear
actuator for the motion control.
A schematic representation of the Stewart plat-
form is shown in Figure 11 (a). The platform has two
coordinate systems, located at the geometry center of
the moving-platform, P(X
p
, Y
p
, Z
p
), and the geome-
try center at the base-platform (i.e. the fixed plat-
form), B(X , Y, Z). Points b
i
and p
i
are the connect-
ing joints to the base and moving platforms be the
leg i, respectively. The key control parameters are
shown in Figure 11 (b) and (c). The big (R-radius)
and small (r-radius) circles represent the base- and
moving-platform respectively. The leg joints are de-
noted by the b
1
and p
1
. The figures also show the the
length of a leg and the relating angle to Z-plane.
As one key step in the process of motion control,
a lumped-parameter model is used to specify the tar-
get plant given by femur-stump assembly and socket.
This method allows the complex operational behav-
iors of prosthetic devices to be captured by parame-
terized spring-mass-damper models. Especially, the
joint movement along each DoF (Degree of Freedom)
will be expressed as follows:
F = k ×x + d × ˙x + m × ¨x (1)
where k is the spring stiffness, d is the damping coef-
Figure 10: The comparison of estimated force by a lumped
parameter model vs. actual force given a fixed displace-
ment.
ficient, m is the mass, and x is the displacement. The
preferred values for these parameters are estimated
according to the MSE (Mean Square Error) between
the estimated forces in Equation 1 and the estimated
forces from the simulations introduced in Section 3
and 4. The performance of a lumped-parameter model
identified with a pattern search algorithm (Zanetti,
2021) is shown in Figure 10. Currently, our frame-
work supports the estimation of lumped parameters
for each DoF including polar coordinates.
For the motion control of testing, the current
framework adopts a cascaded force-position control
approach, as shown in Figure 12. The design consists
of the following major function blocks:
• Force Control: This is a PID control function for
deriving the desired displacements of the central
moving plate of platform.
• Position Control: This is a PID control function
associated to each leg of the platform for deriving
the required force for the linear actuator based on
the discrepancy between the desired and measured
leg conditions.
• Inverse Kinematics: This is an analysis function
for generating the reference length of each leg of
the platform based on desired position of the cen-
tral moving plate of platform.
• Forward Kinematic: This is an analysis func-
tion for deriving the kinematic conditions of the
geometry center of the moving-platform based on
the measured leg lengths.
As shown in Figure 12, the control starts with
a specific force reference (i.e. a trajectory of de-
sired reference forces F
re f
to be implemented), de-
rived from the biomechanical modeling and simula-
tion. The controller first calculates the differences be-
tween such reference forces with the force feedback
(i.e. a trajectory of actual measured forces F
f eedback
by the Stewart manipulator) as follows:
e
f
= F
re f
− F
f eedback
(2)
where the force feedback is given as the sum of mea-
sured force feedback of each individual leg f
i
, as de-
fined below:
F
f eedback
=
6
∑
i=1
f
i
∗ sin θ
i
(i = 1, 2, ..., 6) (3)
where the force feedback of each leg, f
i
, is measured
by the load cell mounted on each leg. The angle
θ
i
denotes the angle of each leg with respect to the
XY plane on the base platform coordinate system as
shown in Figure 11. The value is calculated with the
position sensor feedback.
A Mechatronics-twin Framework based on Stewart Platform for Effective Exploration of Operational Behaviors of Prosthetic Sockets with
Amputees
79

Figure 11: (a) A schematic view of Stewart Platform(S¸umnu et al., 2017) ; The key leg parameters with (b) side view, and (c)
upper view.
Figure 12: Overview of cascaded force-position control.
The Force Control function derives the desired
displacements of the moving-platform dis
Z
for the ac-
tuation of the desired trajectory as follows:
dis
Z
= (K
pF
)e
f
+ (K
iF
)
Z
t
0
e
f
(τ)d(τ) + (K
dF
)
e
f
(τ)
dt
(4)
This desired displacement is then combined with
the observed Z-position for defining newly desired Z-
position. The Inverse Kinematics function takes then
the desired Z-position as inputs and derives the corre-
sponding reference length of each leg.
The observation of operational conditions is sup-
ported by the Forward Kinematics function, which
derives the current kinematics conditions regarding
the current positions of each leg. The design follows
the concept presented in (Harib and SrinivasanHood,
2003). With this approach, the moving-platform posi-
tion after each iteration is given based on a Jacobian
matrices. To quickly find a good approximation, a nu-
merical solution based on Newton-Raphson method
(Wilson and Sadler, 1993) is used.
The Position Control function takes the desired leg
length references as well as the actual measured leg
positions by the load cell as the input signal. Simi-
lar to force control strategy, the computed errors are
multiplied by PID constants, which have been esti-
mated by trial and error, at each time step. The needed
forces (actuator efforts), F
act
, for each leg are the out-
put of this PID controller which are used to generate
the needed length of each leg to perform the desired
movements of the moving platform of Stewart plat-
form.
BIODEVICES 2022 - 15th International Conference on Biomedical Electronics and Devices
80

F
act
= (K
pP
)e
p
+ (K
iP
)
Z
t
0
e
p
(τ)d(τ) + (K
dP
)
e
p
(τ)
dt
(5)
7 CASE STUDY AND RESULTS
In order to validate the proposed approach, a case
study is carried out using a stump replica casted ac-
cording to the configuration of an amputee. The ge-
ometry and additional data such as weight and height
are identified from a test led by Ossur Inc. as shown
in Table 1.
Table 1: Test-subject information.
Patient info. Value
Age 42 Years
Body mass 80Kg
Height 180cm
A scan of the amputee’s residual limb, shown in
Figure 13 (a), is performed to generate the 3D geom-
etry data for the 3D printing and prototyping of the
stump and socket replicas. For the case study, a cyclic
gait load is applied to the stump as a well-defined gait
behavior. Through the biomechanical modeling and
simulation (Section 3), the corresponding normalized
piston forces are identified, shown in Figure 13 (b).
Figure 13: (a) Scanned residual limb of test-subject; (b) The
related piston force during operation.
The entire assembly is 3D printed and casted
within 72 hours by using six Ultimaker 3D Print-
ers, and thereafter integrated with the Stewart Plat-
form. The Stewart Platform takes the normalised pis-
ton forces as the control references and conducts the
testing. Within the Stewart Platform, the load cells
of leg are Vetek VZ-101BH, whereas the actuators are
Transmotec DLA series linear actuators rated for 250
N of nominal dynamic load. The position control
function is implemented with an embedded computer
node based on Arduino Mega Microcontroller. A cus-
tom package is developed in ROS (Robot Operating
System) to support the control of overall behaviors.
The feedback signals from the position sensors and
load cells are collected with this embedded computer
node and passed the other control functions located
at a host PC (running with Linux, a Ryzen 9 mobile
processor and 32GB RAM).
A comparison of the resulting force trajectory
from the test is compared with the reference trajectory
as shown in Figure 14. In the test, the weight of the
platform, femur and stump assembly are subtracted
from the net force vector to effectively apply the gait
piston force load. The result shows that the proposed
control strategy is capable of achieving the required
magnitude and wave form of the dynamic load cy-
cle. Although a phase shift is observed, mainly due to
the computation delay, it would not affect the overall
quality of test regarding the the replication of targeted
mechanical process. The damping of the signal can
be attributed to the weak of knowledge of the linear
actuators. The inertia of the gearbox can also cause
a damping of the system thus preventing a faster re-
sponse. Further tuning and development of the PID
controllers may alleviate these issues.
8 CONCLUSION AND FUTURE
WORK
In this paper, a novel simulation and testing frame-
work for effective exploration of complex opera-
tional behaviors of prosthetic devices in terms of a
mechatronics-twin was presented. It serves as the an-
alytical replica of prosthetic devices with both virtual
and physical behaviors for effective data-driven anal-
ysis and sensor calculation. The approach provides
also a platform for effective optimization of prosthetic
devices by revealing undesired load conditions with-
out real tests by amputees. This would for example
avoid unnecessary trauma to the amputees.
The results by case study show that the proposed
solutions can fulfill the expected goals. Additionally,
the current design of this framework opens up many
perspectives for future research. In further studies,
the modeling support can be enhanced with a mix-
ture of heterogeneous friction coefficients as well as
more complex hyperelastic material models for the
stump. The simulation and testing cases can also be
automated for different load or gait conditions. A re-
finement of the controller design based on for exam-
ple optimal control would also improve the control
performance. Various software and hardware tech-
nologies would also need be explored to support the
implantation of the proposed framework in industrial
scale.
A Mechatronics-twin Framework based on Stewart Platform for Effective Exploration of Operational Behaviors of Prosthetic Sockets with
Amputees
81
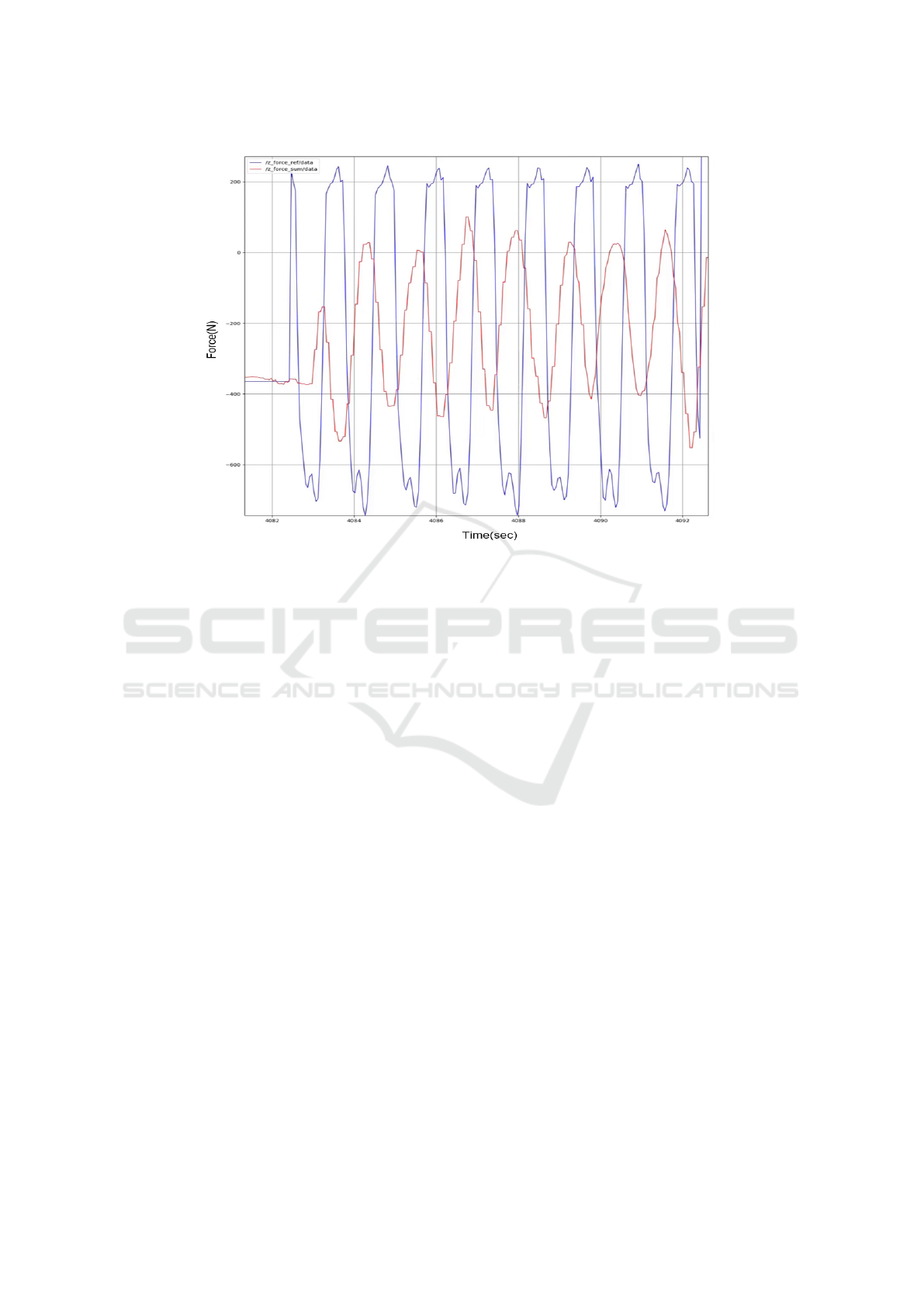
Figure 14: A result of the force control of Stewart Platform.
ACKNOWLEDGEMENTS
This work was supported by the research project
SocketSense (https://www.socketsense.eu/), funded
by the European Union’s Horizon 2020 research and
innovation programme under grant agreement No
825429.
Test-subject data such as residual limb geome-
try, weight, height and age were provided by
¨
Ossur
(https://www.ossur.com) based on a pilot study.
REFERENCES
Baars, E. C., Schrier, E., Dijkstra, P. U., and Geertzen,
J. H. (2018). Prosthesis satisfaction in lower limb am-
putees: A systematic review of associated factors and
questionnaires. Medicine, 97(39).
Bao., M. (2000). Micro mechanical transducers: pressure
sensors, mechanical transducers: pressure sensors, ac-
celerometers and gyroscopes. Handbook of Sensors
and Actuators, Elsevier.
Boschert, S. and Rosen, R. (2016). Digital twin—the sim-
ulation aspect. In Mechatronic futures, pages 59–74.
Springer.
Brandt, G., Zimolong, A., Carrat, L., Merloz, P., Staudte,
H., Lavall
´
ee, S., Radermacher, K., and Rau, G. (1999).
Crigos: a compact robot for image-guided orthopedic
surgery. IEEE Trans Inf Technol Biomed.
Buis, W. and Convery, P. (1997). Calibration problems
encountered while monitoring stump/socket interface
pressures with force sensing resistors: techniques
adopted to minimise inaccuracies. Prosthetics and or-
thotics international, 21(3).
Dejke, V., Eng, M. P., Brinkfeldt, K., Charnley, J., Lussey,
D., and Lussey, C. (2021). Development of proto-
type low-cost qtss™ wearable flexible more enviro-
friendly pressure, shear, and friction sensors for dy-
namic prosthetic fit monitoring. Sensors, 21(11):3764.
Delp, S. L., Anderson, F. C., Arnold, A. S., Loan, P.,
Habib, A., John, C. T., Guendelman, E., and The-
len, D. G. (2007). Opensim: open-source software
to create and analyze dynamic simulations of move-
ment. IEEE transactions on biomedical engineering,
54(11):1940–1950.
Fichter, E., Kerr, D., and Rees-Jones, J. (2008). The
gough—stewart platform parallel manipulator: A ret-
rospective appreciation. Journal of Mechanical Engi-
neering Science, 223:243–281.
Furqan, M., Suhaib, M., and Ahmad, N. (2017). Studies on
stewart platform manipulator: A review. Journal of
Mechanical Engineering Science, 31:4459–4470.
Geng, Y., Yang, P., Xu, X., and Chen, L. (2012). Design
and simulation of active transfemoral prosthesis. In
2012 24th Chinese Control and Decision Conference
(CCDC), pages 3724–3728.
Grace, K., Colgate, J., Glucksberg, M., and Chun, J.
(1993). Studies on stewart platform manipulator: A
review. Proceedings IEEE International Conference
on Robotics and Automation.
BIODEVICES 2022 - 15th International Conference on Biomedical Electronics and Devices
82

Harib, K. and SrinivasanHood, K. (2003). Kinematic and
dynamic analysis of stewart platform-based machine
tool structures. Robotica, 21:541–554.
Jamaludin, M. S., Hanafusa, A., Yamamoto, S.-I., Agarie,
Y., Otsuka, H., and Onishi, K. (2018). Evaluation
of the effects of geometrical changes in prosthetic
socket towards transfemoral residuum via finite el-
ement method. In 2018 IEEE-EMBS Conference
on Biomedical Engineering and Sciences (IECBES),
pages 314–319. IEEE.
Khodasevych, I., Parmar, S., and Troynikov, O. (2017).
Flexible sensors for pressure therapy: Effect of sub-
strate curvature533and stiffness on sensor perfor-
mance. Sensors, 17(10).
Mohamed, A. (2018). Modeling and simulation of trans-
femoral amputee gait. PhD thesis, University of New
Brunswick.
Rossell, J., Palacios-Quinonero, F., Rubio-Massegu, J., and
Vicente-Rodrigo, J. (2015). Tracking control for a
stewart platform prototype. 2015 International Con-
ference on Advanced Mechatronics, Intelligent Man-
ufacture, and Industrial Automation (ICAMIMIA),
0:58–63.
Schmidt, R. and Singh, K. (2010). Meshmixer: an inter-
face for rapid mesh composition. In ACM SIGGRAPH
2010 Talks, pages 1–1.
S¸ umnu, A., G
¨
uzelbey,
˙
I. H., and C¸ akir, M. V. (2017). Simu-
lation and pid control of a stewart platform with linear
motor. Journal of Mechanical Science and Technol-
ogy, 31(1):345–356.
Wapler, M., Urban, V., Weisener, T., Stallkamp, J., D
¨
urr,
M., and Hiller, A. (2003). Studies on stewart platform
manipulator: A review. Transactions of the Institute
of Measurement and Control, 25:279–280.
Willson, A. M. (2017). A Quasi-Passive Biarticular Pros-
thesis and Novel Musculoskeletal Model for Transtib-
ial Amputees. PhD thesis.
Wilson, C. and Sadler, J. (1993). Kinematics and Dynam-
ics of Machinery. Harper Collins College Publishers,
New York, 3rd edition.
Zanetti, L. R. (2021). Lumped parameter and modal models
to simulate ground reaction forces due to running.
A Mechatronics-twin Framework based on Stewart Platform for Effective Exploration of Operational Behaviors of Prosthetic Sockets with
Amputees
83
