
Evaluation of Fall Detection Approaches based on Virtual Devices:
Leveraging on Motion Capture Data in Unity environments
Eduarda Vaz
1
, Heitor Cardoso
2
and Plinio Moreno
2
1
Instituto Superior T
´
ecnico, Universidade de Lisboa, 1049-001 Lisboa, Portugal
2
Institute for Systems and Robotics, Instituto Superior T
´
ecnico, Universidade de Lisboa,
Torre Norte Piso 7, 1049-001 Lisboa, Portugal
Keywords:
Fall Detection, Wrist Devices, Sensor Simulation, Unity Environment.
Abstract:
Realistic fall detection datasets are difficult to acquire due to the high risks, awkward situation of pretending
to be falling and limited to young healthy individuals. In this work we propose to leverage on motion capture
data acquired for games and animations, to simulate the recordings of accelerometers and orientation sensors.
The simulated sensor values are obtained in the Unity environment. Our dataset allows to further evaluate
the generalization properties of previously presented methods by including new types of both falling and non-
falling samples. Our case study is the fall detection based on wristband devices.
1 INTRODUCTION
Average life expentancy and other cultural and social
factors have increased the autonomous elderly pop-
ulation that live single(Fuster, 2017), bringing chal-
lenges on health systems because is very difficult to
monitor and follow dangerous situations that have a
long-term impact on health and independent living.
Falls belong to those situations, which is the focus of
this work. Recent developments on sensing devices
and the small scale electronics have allowed the de-
velopment of wearable gadgets that estimate biosig-
nals for personal monitoring, which can be utilized by
the patients and the healthcare personnel. We study
the fast and accurate fall detection, using data pro-
vided by a 3D accelerometer and a gyroscope on the
user’s wrist.
Several works have addressed the fall detection
as a classification problem, where the ideal algorithm
cannot miss any fall ocurrence (i.e. Zero False Neg-
ative rate). Wearables on the hip (Sucerquia et al.,
2017), chest (Torres et al., 2018), wrist (Khojasteh
et al., 2018; de Quadros et al., 2018) and several
body locations (Casilari et al., 2017b) have been de-
signed and utilized for fall detection in daily activi-
ties. In this work we focus on the wristband devices
and computationally efficient machine learning algo-
rithms. Although several approaches have obtained
good results using only accelerometers (Barri Kho-
jasteh et al., 2018), the False Negative rate is very
high for actual application of the algorithms. More
recent approaches use inputs from an accelerometer,
a gyroscope and a magnetometer, which aim to ex-
tract vertical components of acceleration and velocity
(de Quadros et al., 2018). In this work we follow the
same approach, using a 3D accelerometer and 3D ori-
entation as sensory input for feature computation.
A robust detection of falls based on Machine
learning approaches requires large amounts of data
that covers all the possible daily activities as well as
different types of realistic falls. Several datasets have
been gathered in previous works (Sucerquia et al.,
2017; Khojasteh et al., 2018; Casilari et al., 2017a),
each one with a specific configuration of sensors
and devices that limits the creation of a single large
dataset. The most similar work that fits our wristband
with 3D acceleration and 3D orientation is the one by
(de Quadros et al., 2018), which contains six non-fall
daily activities and four types of falls. We use these
samples as the training set, and extend the experimen-
tal procedure by adding other activities and falls to the
dataset. To extend this dataset, we leverage on Motion
Capture data acquired for movies, games and anima-
tions
1
by creating a new fall dataset based on com-
puter simulations in the Unity engine (Haas, 2014).
Our new dataset includes people doing physical exer-
cise, two new types of falls, more daily activities and
1
https://mixamo.com
50
Vaz, E., Cardoso, H. and Moreno, P.
Evaluation of Fall Detection Approaches based on Virtual Devices: Leveraging on Motion Capture Data in Unity environments.
DOI: 10.5220/0010843600003123
In Proceedings of the 15th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2022) - Volume 4: BIOSIGNALS, pages 50-56
ISBN: 978-989-758-552-4; ISSN: 2184-4305
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

daily activities performed by handicaped persons. We
evaluate the generalization and robustness of the mod-
els built with the dataset in (de Quadros et al., 2018).
Figure 1 shows a field view of the Unity environment
with 32 characters executing actions.
2 RELATED WORK
(Sucerquia et al., 2017) presents a dataset of falls and
ADLs acquired with a device attached to the waist of
participants, which incorporate acceleration and rota-
tion data. The dataset contains 19 types of ADLs and
15 types of falls, performed by young adults and the
elderly in a wide variety of activities. A threshold-
based classifier was selected for this work, achiev-
ing up to 96% accuracy in detecting falls. How-
ever, validation testing with the elderly significantly
reduced the fall detection performance of the features
tested, as algorithms trained on data from young peo-
ple tended to bias the thresholds upwards in ampli-
tude. This type of result makes evident the need to
include data from older people in the training phase.
Considering the future availability of multiple
type of sensors in smart homes and buildings,
(Mart
´
ınez-Villase
˜
nor et al., 2019) presents a dataset
that considers RGB cameras, infrared sensors, and
accelerometers and gyroscopes at several locations
of the body of the person. The scenario is similar
to the one of the SisFall dataset (Sucerquia et al.,
2017), but adds on the multiple sensors in the environ-
ment. (Mart
´
ınez-Villase
˜
nor et al., 2019) shows that
the additional information of the multi-modal sen-
sors provides better fall detection results than using
single-mode sensors. In a follow-up (Galv
˜
ao et al.,
2021) propose to detect the falls on the dataset by
(Mart
´
ınez-Villase
˜
nor et al., 2019) using Neural Net-
work architectures, which improve further the perfor-
mance of fall detection. Although we aim to detect
falls as well, the dataset of (Mart
´
ınez-Villase
˜
nor et al.,
2019) and the fall detection of (Galv
˜
ao et al., 2021),
their application is limited to the smart-home envi-
ronment, where the computational complexity needs
to be moved to a centralized server. As stated in the
introduction, our application scenario considers that
the only available device is a wristband device for fall
detection.
The work exposed in (Quadros et al., 2017;
de Quadros et al., 2018) is the most recent on fall de-
tection using only wrist devices, which is not a com-
mon configuration in the literature. For this proto-
col, twenty-two young adults were involved, repeat-
ing each activity three times. A total of twelve dif-
ferent activities were studied, where half of them are
related to fall simulation and half simulate activities
of daily life. After evaluating five different machine
learning methods, the best result was presented by the
k-NN method, resulting in 99% accuracy. In light
of this result, it is shown that machine learning ap-
proaches with the proper motion decomposition are
potentially capable of achieving optimal results for a
fall detection system based on a wrist-worn device.
3 APPROACH
Fall detection is addressed as a binary classification
problem, considering as raw features 3-dimensional
acceleration and 3-dimensional orientation measured
on the wrist. For every data recording, we com-
pute magnitude of accelerations, velocities and dis-
placements, averaged over fixed intervals of time. In
addition, vertical components of acceleration, veloc-
ity and displacement are estimated using the orien-
tation. Finally, for each recording, mean and max-
imum values of the (vertical) accelerations, veloci-
ties and displacements are arranged in various config-
urations as input features. Those input features are
fed into the following classifiers: K-nearest neigh-
bors (KNN) (Fix and Hodges, 1951), Linear Discrim-
inant Analysis (LDA) (Fisher, 1936), Decision Trees
(DT) (Breiman et al., 2017), Logistic Regression (LR)
(Berkson, 1944) and Support-Vector Machine (SVM)
(Cortes and Vapnik, 1995).
3.1 Feature Computation
Raw acceleration values (X, Y and Z) are filtered us-
ing a median filter to reduce the noise. Then, we
follow the same approach as in (de Quadros et al.,
2018; Quadros et al., 2017) that at each sample, com-
putes the average value of each acceleration compo-
nent over one second. The basis of all the features is
then the magnitude of the filtered and averaged accel-
eration (i.e. Total Acceleration, TA). Finally, for each
sequence the mean and maximum TA values are the
basic features for each sequence to be classified.
Based on the TA values of a sequence, velocity
and displacement features are computed through inte-
gration (i.e. Total Velocity, TV; and Total Displace-
ment, TD). Similar to TA-based features, mean and
maximum values are obtained for each sequence.
The 3D orientation provides the sensor orientation
with respect to the earth, where usually the Z com-
ponent (i.e. vertical component) corresponds to the
majority of the acceleration during fall occurrences.
In addition to TA, TV and TD, we obtain the vertical
Evaluation of Fall Detection Approaches based on Virtual Devices: Leveraging on Motion Capture Data in Unity environments
51

Figure 1: Visualization of the Unity environment of our fall dataset. In this example, each character executes the motion of a
type of fall activity.
component of these features, adding the Vertical Ac-
celeration (VA), Vertical Velocity (VV) and Vertical
Displacement (VD) to the set of available features.
The final set of features includes: TA, TV, TD, VA,
VV and VD.
3.2 Classifiers
Since the feature space is low dimensional and the
number of samples on the (Quadros et al., 2017;
de Quadros et al., 2018) dataset is 792 (Note that just
22 people executed the motions), we resort to con-
ventional machine learning algorithms that have good
learning rates and work robustly on these conditions
(Adadi, 2021), such as K-nearest neighbors, Decision
Trees and Logistic Regression. We also consider Lin-
ear Discriminant Analysis and Support-Vector Ma-
chine.
4 DATASETS
The wrist-based device dataset by (de Quadros et al.,
2018; Quadros et al., 2017) is our training dataset,
which we use to create the classification model. We
contribute with a new testing dataset, which leverages
from freely available full-body character animations
captured from professional motion actors
2
. We add
several simulated sensors on the wrist: Accelerome-
ter, Gyroscope and Orientation, running the simula-
tions in Unity to generate the samples for the testing
dataset in this work.
2
https://mixamo.com
4.1 Arduino-based Device
The dataset by (Quadros et al., 2017) designs a wrist-
band based on an GY-80 device
3
connected to an Ar-
duino UNO, which is connected by cable to a desktop
computer (see Figure 5). The data recorded during
the exectution of the activities includes 3D accelera-
tions, 3D rotational velocities and 3D magnetic field
information. The dataset protocol summarized in Ta-
ble 1, considers Activities of Daily Life (ADL) in the
non-fall class, and four types of fall.
Figure 2: This caption has one line so it is centered.
The dataset contains various types of falls and a
reduced set of non-fall activities (ADLs), which are
oriented towards the elderly use-case scenario. Falls
such as trip-based falls and syncope
4
falls are not con-
sidered in this dataset. In addition, other non-fall ac-
tivities such workout exercises, gestures and idle are
not included in this dataset. We want to evaluate the
generalization properties of Machine learning models
3
Referred to as Inertial Measurment Unit (IMU)
4
Fainting due to cardiovascular abnormalities
BIOSIGNALS 2022 - 15th International Conference on Bio-inspired Systems and Signal Processing
52

Table 1: Summary of activities and number of samples per
class of the (Quadros et al., 2017) dataset. Twenty two sub-
jects participated in the recordings and each subject per-
formed every activity three times, which yields 792 sam-
ples.
Class Activity
Fall
18 samples/person
Forward fall
Backward fall
Sideways to
device’s side
Sideways to
no-device side
Fall after waist
clockwise rotation
Fall after waist
counterclockwise
rotation
Non-fall
18 samples/person
Walking
Clapping
Open and close
door
Moving object
Tying a shoe
Sitting on chair
obtained from (Quadros et al., 2017) dataset to other
types of falls and daily activities.
4.2 Virtual Device in Unity
We develop an Unity environment that includes sev-
eral characters from Mixamo. For each character, a
predefined motion as listed in Table 2 is executed.
While the motion is executed we compute the mo-
tion statistics that emulates the following sensors on
the wrist: (i) 3D accelerometer, (ii) 3D gyroscope and
(iii) 3D orientation.
Figure 3: Reference frame of the sensor computations in
Unity. Note that Unity uses Left hand coordinate systems.
During the execution of the animation, Unity pro-
vides the pose (i.e. position x and orientation matrix
A) of the wrist with respect to the world frame. We
use backward differences to compute the linear ve-
locity (v), linear acceleration (a) and angular velocity
(ω):
v(t) =
∆x(t)
∆t
(1)
a(t) =
∆v(t)
∆t
(2)
ω(t) =
∆A
∆t
A. (3)
The finite differences in Eqs. (1-3) provide the sensor
values for each animated character.
Regarding the falling class, we consider two new
types of falls: Trip and syncope. Pictures from the
animated characters for these type of falls are shown
in Figure 4. Regarding the non-falling class, we con-
sider:
• Workout exercises: Air squats, burpee, running,
jumping jacks, Frisbee throw, dribble
• Gestures: pointing, praying, waving, writing,
handshake
• Idle: Bored balancing while stand, idle stand, idle
sit, idle talking on the phone, idle laying
• Walking: Walking with a walker, walking for-
ward, walking backward, walking and turn 180,
walking injured
• Daily living exercises: Crouch to stand, stairs as-
cending and descending, standing up
Table 2 summarizes the Unity dataset classes and
its corresponding activities per class. The dataset
is parsed into a JSON (Pezoa et al., 2016) file that
contains the simulated sensor values and their corre-
sponding activity type and class label for all the 162
samples.
Table 2: Summary of activities and number of samples per
class of the Unity dataset. LH denotes the character wears
the device on the Left Hand and RH on the Right Hand.
Total number of samples is 162.
Class Activity Hand
Fall
32 samples
Trip fall 11 LH, 11 RH
Syncope fall 5 LH, 5 RH
Non-fall
130 samples
Workout
exercises
13 LH, 13 RH
Daily Living
exercises
6 LH, 6 RH
Gestures 11 LH, 11 RH
Walking 15 LH, 15 RH
Idle 20 LH, 20 RH
5 EXPERIMENTS
We evaluate the generalization capabilities of the clas-
sification models by (de Quadros et al., 2018), using
Evaluation of Fall Detection Approaches based on Virtual Devices: Leveraging on Motion Capture Data in Unity environments
53
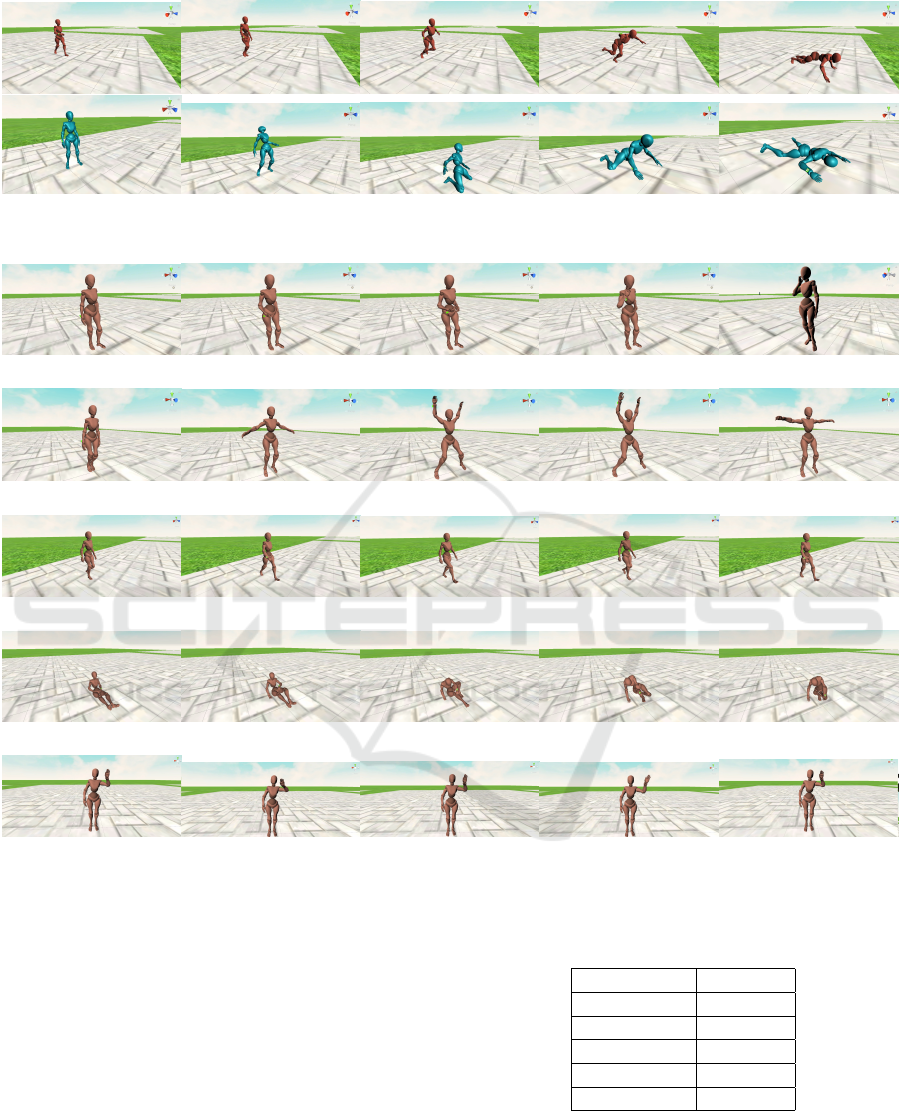
Figure 4: Visualization of the sequence of frames of unity fall types. The top row shows the character during a trip fall and
the bottom row shows the character during the syncope fall.
(a) Idle activity
(b) Jumping jacks activity, which belong to the workout exercises
(c) Walking activity
(d) Person getting up from the floor, which belong to the daily living exercises.
(e) Waving hand activity, which belong to the gestures.
Figure 5: Visualization of the sequence of frames of unity non-fall activities.
as testing set our animated characters dataset in Unity.
The evaluation measures include accuracy, sensitivity
(i.e. true positive rate) and specificity (i.e. true neg-
ative rate). In the case of fall detection the ideal tar-
get is not missing the occurrence of a fall event (i.e.
highest sensitivity). If we have competing algorithms
with similar accuracy, we prefer the approach with
higher sensitivity. The feature sets and classifiers cor-
responds to the ones described in (de Quadros et al.,
2018), which were selected by testing several feature
sets. The feature sets with best results for each classi-
fier are summarized in Table 3.
We follow the k-fold cross-validation method to
evaluate the deviations from the average values of ac-
Table 3: Feature sets and classifiers from (de Quadros et al.,
2018).
Feature set Classifier
VA, VV, VD k-NN
TA, VA, TV LDA
VA, TV LR
VA, TV DT
VA, TV SVM
curacy, sensitivity and specificity as shown in Table
4. The best model is the DT classifier with Vertical
Acceleration and Total Velocity as features, consid-
ering its high mean accuracy and sensitivity values
while having a low deviation from the corresponding
BIOSIGNALS 2022 - 15th International Conference on Bio-inspired Systems and Signal Processing
54

means. Following DT, we have SVM and LDA with
similar accuracy values, but SVM has a higher sensi-
tivity.
Table 4: Evaluation of different machine learning methods
for (de Quadros et al., 2018) dataset. Sensitivity (Sens.),
Specificity (Spec.) and Accuracy (Acc.) results.
Sens. (%) Spec. (%) Acc. (%)
k-NN 92,66 ± 4,03 84,32 ± 7,06 88,02 ± 4,60
LDA 91,68 ± 4,33 93,94 ± 3,42 92,05 ± 3,41
LR 89,04 ± 4,17 93,48 ± 3,11 90,65 ± 2,62
DT 92,93 ± 3,35 93,16 ± 3,65 93,06 ± 2,13
SVM 93,91 ± 4,28 90,39 ± 4,56 92,05 ± 2,93
The models that provide top accuracy values for
each one of the experimental setups in Table 3 are
selected to classify the samples in our new character
simulated dataset. The best classifier is k-NN with
VA, VV and VD features, because reaches perfect
sensitivity while having the second better accuracy.
Table 5: Results after applying the machine learning mod-
els obtain by training (de Quadros et al., 2018) dataset in
Unity dataset. Sensitivity (Sens.), Specificity (Spec.) and
Accuracy (Acc.) results.
Sens. (%) Spec. (%) Acc. (%)
k-NN 100 64,62 71,61
LDA 40,63 63,08 58,64
LR 90,63 35,39 46,30
DT 53,13 77,69 72,84
SVM 68,75 66,15 66,66
6 CONCLUSIONS AND FUTURE
WORK
In this work we present an extension of a fall detec-
tion dataset, where users are wearing wristband de-
vices/smartwatches. The new dataset leverages on
Motion Capture data acquired for movies, games and
animations, which are inserted in the Unity engine
to simulate the wristband sensors. Compared to the
dataset in (Quadros et al., 2017), we include two new
falling types and a large variety of non-falling activi-
ties such as workout exercises, gestures and idle ones.
This large set of non-falling samples serves to evalu-
ate the generalization capabilities of the models devel-
oped by (de Quadros et al., 2018). The k-NN model is
able to detect all the fall events in our new dataset, but
its true negative is low. To address this issue, future
work must develop a larger Unity dataset that should
be merged with the dataset in (de Quadros et al., 2018)
in order to create models with better generalization.
ACKNOWLEDGEMENTS
This publication has been partially funded by the
project LARSyS - FCT Project UIDB/50009/2020
and the project and by the project IntelligentCare –
Intelligent Multimorbidity Managment System (Ref-
erence LISBOA-01-0247-FEDER-045948), which is
co-financed by the ERDF – European Regional De-
velpment Fund through the Lisbon Portugal Regional
Operational Program – LISBOA 2020 and by the Por-
tuguese Foundation for Science and Technology –
FCT under CMU Portugal.
REFERENCES
Adadi, A. (2021). A survey on data-efficient algorithms in
big data era. Journal of Big Data, 8(1):1–54.
Barri Khojasteh, S., Villar, J. R., de la Cal, E., Gonz
´
alez,
V. M., Sedano, J., and Yazgan, H. R. (2018). Evalu-
ation of a wrist-based wearable fall detection method.
In de Cos Juez, F. J., Villar, J. R., de la Cal, E. A.,
Herrero,
´
A., Quinti
´
an, H., S
´
aez, J. A., and Corchado,
E., editors, Hybrid Artificial Intelligent Systems, pages
377–386, Cham. Springer International Publishing.
Berkson, J. (1944). Application of the logistic function to
bio-assay. Journal of the American statistical associ-
ation, 39(227):357–365.
Breiman, L., Friedman, J. H., Olshen, R. A., and Stone,
C. J. (2017). Classification and regression trees. Rout-
ledge.
Casilari, E., Santoyo-Ram
´
on, J.-A., and Cano-Garc
´
ıa, J.-M.
(2017a). Analysis of public datasets for wearable fall
detection systems. Sensors, 17(7).
Casilari, E., Santoyo-Ram
´
on, J. A., and Cano-Garc
´
ıa, J. M.
(2017b). Umafall: A multisensor dataset for the re-
search on automatic fall detection. Procedia Com-
puter Science, 110:32–39. 14th International Con-
ference on Mobile Systems and Pervasive Computing
(MobiSPC 2017) / 12th International Conference on
Future Networks and Communications (FNC 2017) /
Affiliated Workshops.
Cortes, C. and Vapnik, V. (1995). Support-vector networks.
Machine learning, 20(3):273–297.
de Quadros, T., Lazzaretti, A. E., and Schneider, F. K.
(2018). A movement decomposition and machine
learning-based fall detection system using wrist wear-
able device. IEEE Sensors Journal, 18(12):5082–
5089.
Fisher, R. A. (1936). The use of multiple measurements in
taxonomic problems. Annals of Eugenics, 7(2):179–
188.
Fix, E. and Hodges, J. J. (1951). Discriminatory analy-
sis. nonparametric discrimination: Consistency prop-
erties. Technical report, University of California,
Berkeley.
Fuster, V. (2017). Changing demographics: a new approach
to global health care due to the aging population.
Evaluation of Fall Detection Approaches based on Virtual Devices: Leveraging on Motion Capture Data in Unity environments
55

Galv
˜
ao, Y. M., Ferreira, J., Albuquerque, V. A., Barros, P.,
and Fernandes, B. J. (2021). A multimodal approach
using deep learning for fall detection. Expert Systems
with Applications, 168:114226.
Haas, J. K. (2014). A history of the unity game engine.
Khojasteh, S. B., Villar, J. R., Chira, C., Gonz
´
alez, V. M.,
and De la Cal, E. (2018). Improving fall detection
using an on-wrist wearable accelerometer. Sensors,
18(5).
Mart
´
ınez-Villase
˜
nor, L., Ponce, H., Brieva, J., Moya-Albor,
E., N
´
u
˜
nez-Mart
´
ınez, J., and Pe
˜
nafort-Asturiano, C.
(2019). Up-fall detection dataset: A multimodal ap-
proach. Sensors, 19(9):1988.
Pezoa, F., Reutter, J. L., Suarez, F., Ugarte, M., and Vrgo
ˇ
c,
D. (2016). Foundations of json schema. In Proceed-
ings of the 25th International Conference on World
Wide Web, pages 263–273. International World Wide
Web Conferences Steering Committee.
Quadros, T. d. et al. (2017). Development and evaluation of
an elderly fall detection system based on a wearable
device located at wrist. Master’s thesis, Universidade
Tecnol
´
ogica Federal do Paran
´
a.
Sucerquia, A., L
´
opez, J. D., and Vargas-Bonilla, J. F.
(2017). Sisfall: A fall and movement dataset. Sen-
sors, 17(1).
Torres, G. G., Bayan Henriques, R. V., Pereira, C. E.,
and M
¨
uller, I. (2018). An enocean wearable device
with fall detection algorithm integrated with a smart
home system. IFAC-PapersOnLine, 51(10):9–14. 3rd
IFAC Conference on Embedded Systems, Computa-
tional Intelligence and Telematics in Control CESCIT
2018.
BIOSIGNALS 2022 - 15th International Conference on Bio-inspired Systems and Signal Processing
56
