
Multi-stage RGB-based Transfer Learning Pipeline for Hand Activity
Recognition
Yasser Boutaleb
1,2
, Catherine Soladie
2
, Nam-Duong Duong
1
, J
´
er
ˆ
ome Royan
1
and Renaud Seguier
2
1
IRT b-com, 1219 Avenue des Champs Blancs, 35510 Cesson-Sevign
´
e, France
2
IETR/CentraleSupelec, Avenue de la Boulaie, 35510 Cesson-Sevign
´
e, France
Keywords:
First-person Hand Activity Recognition, Transfer Learning, Multi-stream Learning, Features Fusion.
Abstract:
First-person hand activity recognition is a challenging task, especially when not enough data are available.
In this paper, we tackle this challenge by proposing a new low-cost multi-stage learning pipeline for first-
person RGB-based hand activity recognition on a limited amount of data. For a given RGB image activity
sequence, in the first stage, the regions of interest are extracted using a pre-trained neural network (NN).
Then, in the second stage, high-level spatial features are extracted using pre-trained deep NN. In the third
stage, the temporal dependencies are learned. Finally, in the last stage, a hand activity sequence classifier
is learned, using a post-fusion strategy, which is applied to the previously learned temporal dependencies.
The experiments evaluated on two real-world data sets shows that our pipeline achieves the state-of-the-art.
Moreover, it shows that the proposed pipeline achieves good results on limited data.
1 INTRODUCTION
Understanding first-person hand activity is a challeng-
ing problem in computer vision, that has attracted
much attention due to its wide research and prac-
tical applications, such as Human-Computer Inter-
action (Sridhar et al., 2015), Humanoid Robotics
(Ramirez-Amaro et al., 2017), Virtual/Augmented
Reality (Surie et al., 2007), and Multi-media for auto-
mated video analysis (Bambach, 2015).
Recent advances in embedded technologies, such
as wearable cameras which provide low-cost data
such as RGB image sequences, have allowed more
widespread machine-learning-based egocentric activ-
ity recognition (EAR) methods (Tadesse and Caval-
laro, 2018). In addition to its low-cost, RGB im-
age sequences take into consideration both appear-
ance and motion information unlike depth maps or 3D
skeletal data which focus more on the motion. Yet, the
majority of egocentric activities are centered around
hand-object interactions and appearance is highly im-
portant to perform inter-objects and inter-scenarios
differentiation.
To this end, many RGB-based approaches have
been proposed. Most of them are based on end-to-
end Deep Learning (DL) (Kondratyuk et al., 2021)
which has been proven to be effective when a large
Open juice bottlle
TL-based Regions of
interest Extraction
TL-Based Spatial
features Extraction
Temporal
dependences Learning
Post-Fusion-based
Classification
Multi-stream stages
1
2
3
4
time
Figure 1: Our proposed learning pipeline for RGB-based
first-person hand activity recognition. For a given RGB
images activity sequence, in the first stage, the regions of
interest are extracted using a pre-trained NN. Then, in the
second stage, high-level spatial features are extracted using
pre-trained deep NN. Sequentially, in the third stage, the
temporal dependencies are learned. In the last stage, a hand
activity sequence classifier is learned, using a post-fusion
strategy, which is applied to the previously learned tempo-
ral dependencies.
amount of data is available. However, for some indus-
trial applications, providing large-scale labeled data is
still hard and expansive to achieve due to the manual
data annotation process. On the other hand, recent
advances in DL benefit greatly from problems such as
image classification (He et al., 2016; Xie et al., 2017)
and object detection (Liu et al., 2016; He et al., 2020)
which can be exploited as an alternative to overcome
the data scarcity in EAR problems e.g. transfer learn-
ing (TL) techniques.
A particular branch of DL approaches focused
on observation and exploration of spatial attention
Boutaleb, Y., Soladie, C., Duong, N., Royan, J. and Seguier, R.
Multi-stage RGB-based Transfer Learning Pipeline for Hand Activity Recognition.
DOI: 10.5220/0010856200003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
839-848
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
839

through deep neural networks (NNs) to recognize
activities based on visual information (Sudhakaran
et al., 2019; Sudhakaran and Lanz, 2018). How-
ever, the learned spatial attention is not fully confi-
dent, since it is learned in an unsupervised manner
while training a supervised EAR model. This has led
some researchers to supervise spatial attention learn-
ing by using Gaze information (Min and Corso, 2020)
or by manually annotating the data (Ma et al., 2016)
which is more expensive. In all cases, this has con-
firmed that, in first-person hand activity recognition
problems, the visual points of interest are concen-
trated around the hands and manipulated objects. This
relevant information can be used to design more ro-
bust EAR algorithms.
Motivated by all these observations, we introduce
in this paper, a new learning pipeline for RGB-based
first-person hand activity recognition, that aims at
overcoming the data scarcity problem while ensur-
ing a low-cost good and accurate recognition. It is a
novel four-stage learning pipeline, such as each stage
is described as follows: (1) Regions of Interest Ex-
traction (RoIE). Unlike existing methods that use DL-
based visual attention and require a large amount of
data, we propose to directly use the right and left
hands as pertinent regions of interest that give infor-
mation about manipulated objects and actions being
performed. These regions of interest are extracted us-
ing a TL technique. Our experiments showed that
this information is the key to first-person hand ac-
tivity recognition. In order to robustify the recog-
nition model, we propose a data augmentation pro-
cess, which is specifically adapted to these regions
of interest. (2) Spatial Features Extraction (SFE).
Here, we also use TL instead of end-to-end DL meth-
ods. This stage exploits the visual information of the
resulted regions of interest from the previous stage.
Adapting TL for RoIE and SFE allows learning with
a limited number of training samples while provid-
ing a good accuracy score. Furthermore, it decreases
the training cost, since the transferred NN are al-
ready pre-trained. (3) Temporal Dependencies Learn-
ing (TDL). For each extracted deep visual descrip-
tor (right and left) resulting from the previous stage,
we learn the temporal dependencies in a multi-stream
manner (Boutaleb et al., 2021) which also avoids the
over-fitting problem. (4) Post-Fusion classifier (PFC).
This last stage is a classifier that learns activity classes
(Boutaleb et al., 2021).
The remainder of this paper is organized as fol-
lows. After giving a review on the related work
in Section 2, we describe our proposed pipeline for
RGB-based hand activity recognition in Section 3.
Then, we show the benefits of the proposed approach
by presenting and discussing the experimental results
in Section 4. Section 5 concludes the paper.
2 RELATED WORK
First-Person hand activity recognition using visual
data that provide motion and appearance information
has attracted a lot of attention over the last few years.
Aiming at exploiting the motion information,
many approaches make use of optical flow as the main
source of motion features (Tadesse and Cavallaro,
2018). Optical flow can be obtained using direct mo-
tion estimation techniques (Irani and Anandan, 1999)
to achieve frames/sub-frames sub-pixel accuracy re-
sulting in a dense representation. Yet, this represen-
tation has a high-computational cost and suffers from
redundancy. This has lead (Abebe et al., 2016; Po-
leg et al., 2014) to use grid (spars) representation of
the optical flow. Sparse optical flow gains in com-
putational cost. However, it suffers from an informa-
tion leak and have limited discriminative capabilities
as specific motion characteristics (e.g. magnitude) are
not exploited (Tadesse and Cavallaro, 2018).
In order to exploit the appearance information,
many works traditionally used local visual features
such as HOF (Laptev et al., 2008), MBH (Wang et al.,
2012), 3D SIFT (Scovanner et al., 2007), HOG3D
(Kl
¨
aser et al., 2008), and extended SURF (Willems
et al., 2008) to encode appearance information, so that
it can be used as feature descriptors to recognize ac-
tivities. On the other hand, DL NNs have been suc-
cessful in learning high-level appearance features for
image classification (Rawat and Wang, 2017). This
has attracted a lot of interest in the EAR area (Karpa-
thy et al., 2014; Tran et al., 2015; Ji et al., 2013;
Taylor et al., 2010). Recently, (Singh et al., 2016),
proposed a two-stream DL architecture, 2D and 3D
CNNs fed by egocentric cues (hand Mask, head Mo-
tion, and saliency Map). The two-streams networks
are followed by class score fusion strategy to classify
activities. To make use of the temporal dimension,
they added a temporal stream that uses stacked opti-
cal flow as input to capture motion information. How-
ever, these egocentric cues are not always available.
Similarly, (Ma et al., 2016) proposed a two-stream ar-
chitecture: an appearance stream for object classifi-
cation task by applying hand segmentation and object
location; and a motion stream for action classification
using optical flow. Finally, the activity class label is
given by the concatenation of the action and the object
class labels. Therefore, a heavy manual data annota-
tion was necessary for object region localization and
hand segmentation. Moreover, a single RGB image is
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
840

used for encoding appearance without considering the
temporal ordering. As an alternative to optical-flow-
based motion information, which is also interpreted as
temporal dependencies features, (Ryoo et al., 2015)
extracted features from a series of frames to perform
temporal pooling with different operations, including
max pooling, sum pooling, or histogram of gradients.
Then, a temporal pyramid structure allows the en-
coding of both long-term and short-term characteris-
tics. However, these methods do not take into con-
sideration the temporal order of the activity sequence
frames.
Furthermore, to better exploit information in the
temporal dimension, many other works focused on
Recurrent Neural networks (RNNs) equipped with
Long Short Term Memory (LSTMs) cells (Cao et al.,
2017; Verma et al., 2018), and Convolutional Long
Short-Term Memory (ConvLSTM) (Sudhakaran and
Lanz, 2017; Sudhakaran and Lanz, 2018) for their
capabilities of reasoning along the temporal dimen-
sion to learn the temporal dependencies in the respect
of temporal order. This has motivated (Sudhakaran
et al., 2019) to propose an customized LSTM unit in
order to learn visual attention along the activity se-
quence jointly with the temporal dependencies. How-
ever, attention-based methods still have some limi-
tations as we mentioned in section 1. In contrast,
we propose to directly extract the regions of interest
and their associated spatial features, then we learn the
temporal dependencies in a multi-stream manner.
3 PROPOSED METHOD
This section details our proposed pipeline following
the illustration of Figure 1. In the first stage, we ex-
tract the regions of interest (Sec 3.1). Then, in the
second stage, we extract the spatial features (Sec 3.2).
In the third stage, we learn the temporal dependencies
(Sec 3.3). Once the temporal learning is ended, in the
last stage, we transfer and exploit the knowledge from
the previous stage to learn to classify activities (Sec
3.4).
3.1 TL-based Regions of Interest
Extraction (RoIE) and Data
Augmentation
Our pipeline uses as unique input a sequence of im-
ages (frames) representing a first-person hand activ-
ity, that we denote by S = {I
1
, I
2
, .., I
T
}, where I
t
is an
image frame at time-step t and T the sequence max
length.
Figure 2: The first stage of the pipeline: TL-based Regions
of interest Extraction (RoIE). Each image frame I
t
is fed
into a pre-trained NN H(I
t
) resulting in two hand region
sequences l and r that refer to the left and the right-hand
regions respectively.
As we mentioned in section 1, the main focus on
the first-person hand activity is centred around the
hands and manipulated objects. To this end, we pro-
pose to directly extract and use the left and the right
hand regions as regions of interest. Let denoting
H(I
t
) = {h
le f t
t
, h
right
t
} where H(.) is the pre-trained
NN that takes an image frame I
t
as an input and out-
puts two sub-images h
le f t
t
and h
right
t
that refers to the
left and the right hand respectively. So, by applying
this to all image frames, the activity sequence will be
reformulated by two sequences l and r that belong to
the left and right hand respectively, such as:
l = {h
le f t
t
}
t=1:T
and r = {h
right
t
}
t=1:T
(1)
Figure 2illustrates the hand region extraction pro-
cess. The proposed regions of interest characterize
the hand activity sequence in a relevant way since
the visual information from the hands contains in-
formation about the type of grasp and the shape of
objects being manipulated (noun) e.g. ”Juice bot-
tle”. Moreover, passing this information through the
time dimension allows retrieving relevant information
about the performed action (verb) e.g. ”Open”. In
Section 4.4, we quantitatively show the efficiency of
the proposed regions of interest. On the other hand,
unlike visual attention methods based on end-to-end
NN (Sudhakaran et al., 2019), using TL to extract
the regions of interest helps to avoid the over-fitting
problem and allows training with a limited number
of samples while ensuring a good accuracy score.
In section4.2, we give details about the adopted pre-
trained NN.
In daily/industrial hand activities, one of the two
hands, left or right, can be dominant. It depends on
whether the participant is right- or left-handed. This
may cause an imbalance in the training data-set and
make the model less generalizable. To this end, we
proposed an adapted data augmentation process in or-
der to balance the training data-set. It is applied to the
RoIE stage’s outputs. If only one hand is detected for
e.g. left hand, we augment the extracted sub-image of
the right-hand h
right
t
with the mirror effect of the de-
Multi-stage RGB-based Transfer Learning Pipeline for Hand Activity Recognition
841
tected left-hand h
le f t
t
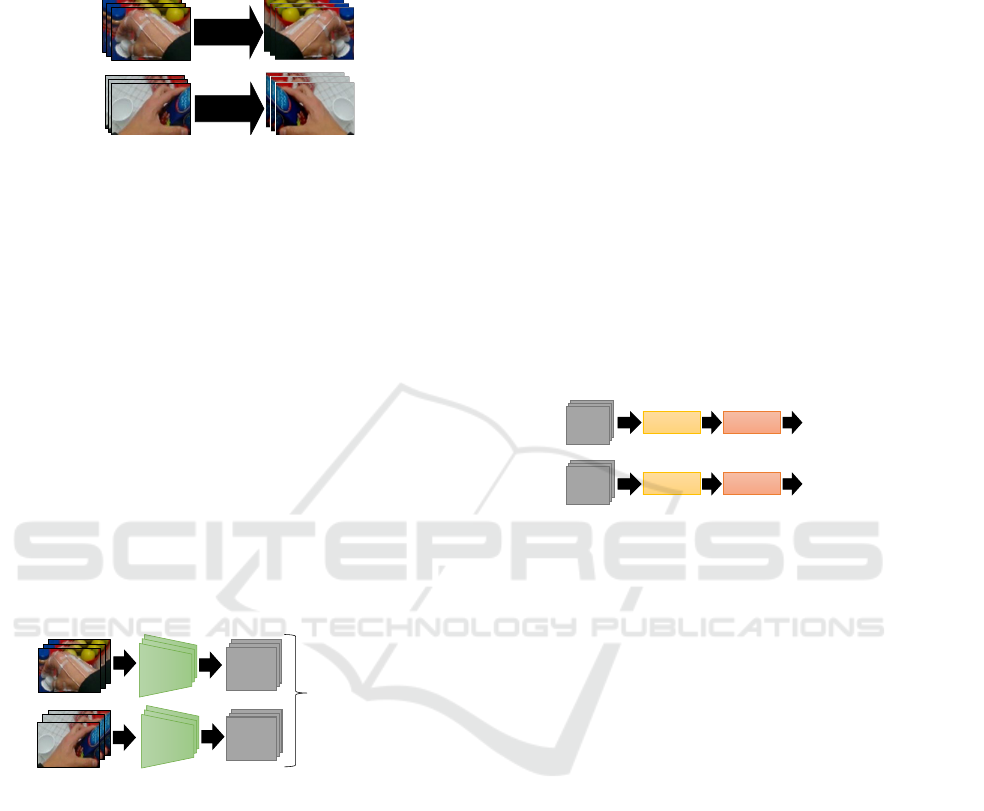
. The figure 3illustrates the data
augmentation process.
Augmentation
for left hand
(a)
(b)
Augmentation
for right hand
Figure 3: Illustration of our data augmentation process. (a)
the mirror effect of extracted right-hand sub-images h
right
t
are used as augmentation for those of the left hand. (b) the
mirror effect of extracted left-hand sub-images h
le f t
t
is used
as augmentation for those of the right hand.
In section 4.5, we show quantitatively the effec-
tiveness of this proposed data augmentation process.
3.2 TL-based Spatial Features
Extraction (SFE)
One of the problems where deep learning excels is im-
age classification (Xie et al., 2017). The goal in image
classification is to classify a specific picture according
to a set of possible categories by deeply exploring and
learning the spatial information. This motivated us to
uses a pre-trained NN classifier to extract learned spa-
tial features from the sub-images Eq.1 resulted from
the previous stage.
Deep Spatial Features
descriptors
Figure 4: The second stage of the pipeline: TL-Based Spa-
tial features Extraction (SFE). Each extracted sub-image
h
le f t
t
∈ l and h
right
t
∈ r is fed into a pre-trained NN E(.). This
stage results two deep spatial feature descriptor sequences
Ψ
l
and Ψ
r
for right and left hand respectively.
We denote by E(.) this pre-trained NN. And we
formulate the spatial feature descriptor sequences by
Ψ
l
and Ψ
r
referring to the left and the right hands
regions as follow:
Ψ
l
= {E(h
le f t
t
)}
t=1:T
and Ψ
r
= {E(h
right
t
)}
t=1:T
(2)
This stage allows to exploit the hands visual in-
formation resulted from the previous stage. Using a
sophisticated pre-trained NN reduces the dimension
while keeping a pertinent high-level spatial features.
Adding to that all TL benefits, it decreases the learn-
ing cost and avoids the over-fitting problem while
learning on a limited number of training samples. In
section 4.2, we gives details about the adopted pre-
trained NN.
3.3 Temporal Dependencies Learning
(TDL)
Learning long and complex activities requires consid-
ering the temporal dimension to make use of the long-
term dependencies between sequence time-steps. As
we do not have a learned NN for this very specific
task, we train a LSTM-based NN for its great success
and capabilities to learn these long/short term depen-
dencies. Moreover, in contrast to traditional RNNs,
LSTMs overcome the vanishing gradient problem
by using a specific circuit of gates (Hochreiter and
Schmidhuber, 1997).
LSTMs Softmax
Softmax
Activity
Activity
LSTMs
Figure 5: The third stage of the pipeline: Temporal depen-
dencies Learning. For each feature descriptor sequence Ψ
l
and Ψ
r
a NN composed of stacked LSTM layers followed
by softmax layer are trained independently to learn tempo-
ral dependencies by classifying activities.
(Avola et al., 2019; Liu et al., 2019) concatenate
different types of feature spaces as one input vector,
which may complicate the input and confuse the NN.
In contrast, similarly to (Boutaleb et al., 2021), for
each spatial feature descriptors Ψ
l
and Ψ
r
(seen in Sec
3.2), we train separately a simple NN that consists of
staked LSTM layers followed by a softmax layer to
classify activities. Therefore, in total, we train two
NN separately as shown in Figure 5.
More formally, for each descriptor sequence Ψ
l
and Ψ
r
, we model the temporal dependencies with
a composite function G
θ
l
(Ψ
l
) and G
θ
r
(Ψ
r
) respec-
tively, where G
θ
.
(·) is a LSTM network with θ
l
and θ
r
learnable parameters, while the output of G
θ
.
(·) refers
to the last hidden state of the last LSTM unit. For
each network we define a cross entropy loss functions
L
l
and L
r
as follows:
L
l
= −
N
∑
c=1
y
c
log( ˆy
c
l
) and L
r
= −
N
∑
c=1
y
c
log( ˆy
c
r
) (3)
where N is the number of classes and y
c
the tar-
get label. The ˆy
c
l
and ˆy
c
r
are the softmax outputs that
refers to the predicted label using left and right hand
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
842

LSTMs
Activity label
LSTMs
Softmax
TL-based Regions of
interest Extraction
TL-Based Spatial
features Extraction
Temporal
dependences Learning
Multi-stream stages
1
2
3
Concatenation
MLP
Post-Fusion-based Classification
Classification
Fusion
Transfer Learning
4
time
Figure 6: The fourth stage of the pipeline: Post-Fusion-based Classification. Once the temporal dependencies are learned
in the third stage. The LSTM layers are transferred to the fourth stage with fixed parameters θ
∗
l
and θ
∗
r
. Their outputs are
concatenated and fed into a MLP+softmax for the final classification.
descriptor sequence respectively. The temporal learn-
ing parameters are optimized by minimizing over a
labeled data set:
θ
∗
l
= argmin
θ
l
L
l
(y, ˆy
l
) and θ
∗
r
= argmin
θ
r
L
r
(y, ˆy
r
) (4)
At the end of the pre-training, as a result, we have
a set of two trained stacked LSTM layers, with opti-
mised parameters θ
∗
l
and θ
∗
r
:
G
θ
∗
l
(Ψ
l
), G
θ
∗
r
(Ψ
r
) (5)
We note that the purpose of this third stage is to
learn the temporal dependencies, and all the classifi-
cation results ˆy
l
and ˆy
r
are ignored. Only the results
shown in Eq.5 are needed for the next stage.
This pre-training strategy of multiple networks
avoids the fusion of different features spaces, which
reduces the input complexity and the noise learning.
It also allows the LSTM to focus only on learning
over one specific descriptors sequence Ψ
l
or Ψ
r
inde-
pendently, which also helps to avoid the over-fitting
problem (Ying, 2019; Boutaleb et al., 2021).
3.4 Post-Fusion-based Classification
(PFC)
Once the temporal dependencies are learned, we pro-
ceed to the final classification. To this end, similarly
to (Boutaleb et al., 2021), we train another multi-input
NN that exploits the resulted two pre-trained stacked
LSTM layers introduced in (Sec 3.3) that we transfer
with a fixed optimized parameters θ
∗
l
and θ
∗
r
as illus-
trated in Figure 6.
Seeking to ensure the best classification accuracy,
the two parallel output branches of the transferred
LSTMs are concatenated, then fed into a Multi Lay-
ers Perceptron (MLP) that consists of two Fully Con-
nected (FC) layers, followed by a softmax layer (Fig-
ure 6). We model this network as shown in Eq.6,
where F
γ
is a MLP+softmax with learnable parame-
ters γ, and C is the concatenation function:
F
γ
(C({G
θ
∗
l
, G
θ
∗
r
})) (6)
The learnable parameters γ are optimized using
the same loss function as in the previous stage (Sec
3.3) by minimizing over the same training data set.
This post-fusion strategy aims at ensuring a good
accuracy score by tuning between the pre-trained
LSTMs outputs.
4 EXPERIMENTS
4.1 Data Sets
Several large-scale data-sets have been proposed for
EAR, e.g. EGTEA (Sigurdsson et al., 2018) and Cha-
radesEgo (Fathi et al., 2011). In this work, we try
to solve a sub-problem of EAR, namely first-person
hand activity recognition, while activities are sup-
posed to be performed with the hands, which is not
the case for some activity categories of these data-
sets. To this end, to validate our approach, we used
the following real-world data sets:
FPHA Data Set. Proposed by (Garcia-Hernando
et al., 2018). It provides RGB and depth images with
annotations (associated activitie labels). It is a diverse
data set that includes 1175 activity videos belonging
to 45 different activity categories, in 3 different sce-
narios performed by 6 actors with high inter-subject
and intra-subject variability of style, speed, scale, and
viewpoint. It represents a real challenge for activity
recognition algorithms. For all the experiments, we
used the setting proposed in (Garcia-Hernando et al.,
2018), with exactly the same distribution of data: 600
activity sequences for training and 575 for testing.
EgoHand Data Set. Proposed by (Bambach et al.,
2015). It has 48 videos recorded with a Google glass.
Each video has two actors doing one of the 4 activ-
ities: playing puzzle, cards, jenga or chess. These
videos are recorded in 3 different environments: of-
fice, courtyard and living room. We chose this data
set to evaluate our method in case there is not enough
Multi-stage RGB-based Transfer Learning Pipeline for Hand Activity Recognition
843

training data. We used the setting proposed by (Bam-
bach et al., 2015) that randomly splits these videos
into 36 samples for training, 4 for validation and 8 for
the test.
4.2 Implementation Details
Regions of Interest Extraction. To this end, we used
a pre-trained NN proposed by (Shan et al., 2020),
which is based on Faster R-CNN (Ren et al., 2015).
We have mainly chosen this NN for its great hand de-
tection accuracy providing similar performance on the
same and cross-data set as reported in (Shan et al.,
2020). On the other hand, Faster R-CNN combines
a region proposal network (RPN) based on the CNN
model with the R-CNN (Girshick et al., 2014). This
combination allowed to reduce the computational cost
while achieving efficient object detection. This NN
is pre-trained on 100K frames of 100DOH data-set
(Shan et al., 2020) and 56.4K frames sub-sets of
(Damen et al., 2018; Sigurdsson et al., 2018; Fathi
et al., 2011). It achieves 90.46% of hand detection
accuracy on the 100DOH data set. Detectron2 (Wu
et al., 2019) is used for the implementation.
The pre-trained NN predicts bounding boxes for
all detected hands in the image frame with a confi-
dence score between 0 and 1. We accept boxes with
a confidence score above 0.8. We assign each box to
the left or the right hand of the user according to the
coordinates of the box center in the image frame. If a
third-person hand is detected (more than two hands),
we only consider the largest boxes (the closest to the
camera) as the user’s hands. Finally, for the frames
with no available detection, we assume a hand posi-
tion below the field of view.
Spatial Features Extraction. For this purpose, we
deliberately chose VGG16 (Liu and Deng, 2015)
for its widespread use as a standard foundation for
TL (Tammina, 2019) and domain adaptation (Chaves
et al., 2020). It is a powerful convolutional neural net-
work, mainly designed for large-scale image recogni-
tion. VGG16 model contains a stack of convolutional
layers which capture basic features like spots, bound-
aries, and colors pattern followed by three fully-
connected layers (FCL) that provides complex higher-
level feature patterns. To this end, we extracted fea-
tures from the last FCL, which provides an output
vector of dimension 1x4096. VGG16 has shown good
results. However, it is highly computational due to
its complex architecture and a large number of pa-
rameters. Moreover, the size of its last FCL output
is very large, and multiplying this size by the length
of the activity sequence results in a large input dimen-
sion (200x4096) for the LSTM network. This requires
high computing resources and time for the training
process. Indeed, we experimented with a lighter pre-
trained model, namely MobileNetV2 based on an in-
verted residual structure (Sandler et al., 2018). Ta-
ble 2 shows the comparison between VGG16 and
MobileNetV2. By using MobileNetV2, the accu-
racy dropped by 1.5% but we achieved gain in infer-
ence/training time and computational resources. The
two models VGG16 and MobileNetV2 are pre-trained
for image classification tasks on the ImageNet data-
set (Russakovsky et al., 2015) achieving 92.7% and
90% accuracy respectively. Keras framework is used
for the implementation.
Temporal Dependencies Learning. For each spa-
tial descriptors sequence that refers to the right and
the left hands, we trained different configurations of
separated NNs that consist of 1, 2, 3, and 4 staked
LSTM layers followed by a softmax. We selected the
best configuration that gives the best accuracy score:
2 staked LSTM layers of 100 units. We set the proba-
bility of dropout to 0.5 (outside and inside the LSTM
gates). We used Adam with a learning rate of 0.003
for the optimization. All the networks are trained with
a batch size of 64 for 400 epochs. We also padded all
sequence lengths to 200 and 100 time-steps per se-
quence for the FPHA and EgoHand data sets respec-
tively.
Post-Fusion-based Classification. Once all the tem-
poral dependencies are learned (end of stage 3), in
the PFC stage, we recover the pre-trained LSTM net-
works, we fix all their weights and discard softmax
layers. Then, the two outputs branches from the two
parallel transferred LSTMs are concatenated and fol-
lowed by a MLP that consists of two dense layers of
256 and 128 neurons respectively, equipped with a
relu activation function. At the end of the network, a
softmax layer is used for the final classification. This
network is trained until 100 epochs, with the same
batch size and optimization parameters as the previ-
ous networks. The implementation is based on Keras
framework.
4.3 State-of-the-Art Comparison
Table 1 shows the accuracy of our approach com-
pared with state-of-the-art methods on the FPHA data
set. The best performing approach among state-of-
the-art methods is Tear (Li et al., 2021), a transformer-
based that consists of two modules, inter-frame atten-
tion encoder, and mutual-intentional fusion block. By
exploiting RGB and depth modalities they achieved
97.04% of accuracy, which is equivalent to our
achievement (97.91%) while using the RGB modal-
ity only. The approach proposed by Boutaleb et al.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
844

Table 1: Activity recognition accuracy comparison of our proposed approach and the state-of-the-art on the FPHA data set.
Our method outperforms all RGB-based methods including end-to-end visual attention methods.
Methods Year Modality Accuracy(%)
Two stream-color (Feichtenhofer et al., 2016) 2016 RGB 61.56
H+O (Tekin et al., 2019) 2019 RGB 82.26
Rastgoo et al. (Rastgoo et al., 2020) 2020 RGB 91.12
Trear (Li et al., 2021) 2021 RGB 94.96
HON4D (Oreifej and Liu, 2013) 2013 Depth 59.83
HOG2-depth (Ohn-Bar and Trivedi, 2014) 2014 Depth 70.61
Novel View (Rahmani and Mian, 2016) 2016 Depth 69.21
Trear (Li et al., 2021) 2021 Depth 92.17
Lie Group (Vemulapalli et al., 2014) 2014 3D Pose 82.69
Gram Matrix (Zhang et al., 2016) 2016 3D Pose 85.39
TF (Garcia-Hernando et al., 2018) 2017 3D Pose 80.69
Nguyen et al. (Nguyen et al., 2019) 2019 3D Pose 93.22
Boutaleb et al. (Boutaleb et al., 2021) 2020 3D Pose 96.17
HOG2-depth+pose (Ohn-Bar and Trivedi, 2014) 2014 Depth+3D Pose 66.78
JOULE-all (fang Hu et al., 2015) 2015 RGB+Depth+3D Pose 78.78
Tear (Li et al., 2021) 2021 RGB+Depth 97.04
Our - RGB 97.91
Table 2: Performance comparison of our method on FPHA
data-set using two different pre-trained NNs for spatial fea-
tures extraction, namely VGG16 and MobileNetV2.
Model Inference time (ms) Parameters (millions) Last FCL size Acc.(%)
VGG16 5.17 138 1x4069 96.52
MobileNetV2 3.34 3.5 1x1028 95.01
Table 3: Activity recognition accuracy results on EgoHand
data-set that contains only 48 samples. Results show that
our method performs better on a limited amount of data.
Method Acc (%)
Khan et al. (Khan and Borji, 2018) + Ground truth hand mask 71.1
Khan et al. (Khan and Borji, 2018) 68.4
Bambach et al. (Bambach et al., 2015) + Ground truth hand mask 92.9
Bambach et al. (Bambach et al., 2015) 73.4
Babu et al. (Babu et al., 2019) 89.0
Our 98.79
(Boutaleb et al., 2021) gives good results, but they
used the ground truth of 3D hand joints, which is not
always available. This may conclude that RGB im-
age sequences can provide the necessary elements to
recognize hand activities.
Table 3 shows the accuracy of our approach com-
pared to state-of-the-art methods on the EgoHand data
set. The proposed work by (Khan and Borji, 2018)
and (Bambach et al., 2015) was more focused on hand
segmentation in an egocentric viewpoint. Neverthe-
less, they used the estimated and ground-truth hand
masks to recognize activities. We outperformed their
results by more than 5% of accuracy, confirming the
effectiveness of the proposed regions of interest over
the hand mask. Since the EgoHand contains only 48
samples, this can also prove the ability of our method
to learn on a limited amount of data.
4.4 Contribution of Proposed Regions
of Interest
To better show the contribution of left and right hands
regions of interest, we skipped the RoIE stage. In-
stead, we used the full-image frames. As expected,
results presented in table 4 shows that without our re-
gions of interest, the accuracy dropped by more than
14%, which confirms RoIE effectiveness. Moreover,
by using only the right hand as the region of interest,
we overcome most state-of-the-art methods.
Table 4: Activity recognition accuracy results on FPHA
data-set with and without using our proposed regions of in-
terest. Results show the significant impact of these regions
of interest.
Extracted region of interest Acc.(%)
Full image 82.01
Left hand bounding box 85.00
Right hand bounding box 91.82
Left+Right hands bounding boxes 96.52
As we mentioned in section 3.1, highly relevant
information related to manipulated objects (nouns)
e.g. ”juice bottle” can be derived from the visual
data of the hand boxes, such as grasp type and ob-
ject shape. Furthermore, by learning the tempo-
ral dependencies through this information, we can
also relevantly characterize the actions (verbs) e.g.
”open”. For more ablation studies, we experimented
our method on object and action recognition. Table 5
shows that our proposed method gives a good object
and action recognition score by achieving 97.56% and
94.26% of accuracy respectively.
Multi-stage RGB-based Transfer Learning Pipeline for Hand Activity Recognition
845
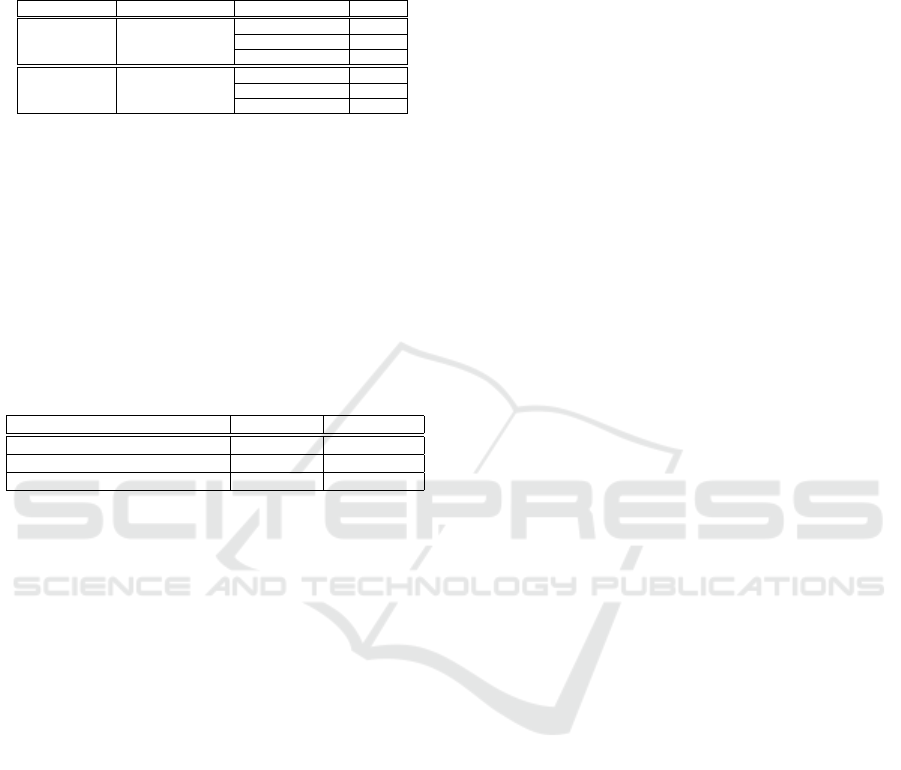
Table 5: Object (noun) and Action (verb) recognition ac-
curacy on FPHA data-set using our proposed pipeline. The
accuracy results show that the proposed regions of inter-
est allow object and action recognition which facilitates the
hand activity recognition.
Task Number of classes Region of interest Acc(%)
Left hand 88.69
Objects (nouns) 27 Right hand 95.82
Left+Right hands 97.56
Left hand 85.56
Actions (verbs) 27 Right hand 92.17
Left+Right hands 94.26
4.5 Data Augmentation
The results in Table 6 show that the accuracy is signif-
icantly increased by 1.39% when we used our adapted
data augmentation process. Furthermore, using only
the right-hand regions of interest, we outperforms
most state-of-the-art methods by achieving 94.26% of
accuracy.
Table 6: Activity recognition accuracy results on FPHA
data-set. (*) without data augmentation, (**) using data
augmentation.
Extracted region of interest Acc(*) (%) Acc(**) (%)
Left hand bounding box 85.00 88.00
Right hand bounding box 91.82 94.26
Left+Right hands bounding boxes 96.52 97.91
5 CONCLUSION
In this paper, a novel learning pipeline for first-person
hand activity recognition has been introduced. The
proposed pipeline is composed of four stages. In the
first stage, we presented our TL-based regions of in-
terest extraction, the left, and right hands regions,
which has proven to be effective. The second stage
is the TL-based deep spatial feature extraction method
that exploits the regions of interest visual information.
To manage the temporal dimension, in the third stage
we trained temporal NNs in a multi-stream manner.
Then, in the last stage, we applied a post-fusion strat-
egy to classify activities. The pipeline is evaluated on
two real-world data sets and showed good accuracy
results.
As future improvements, we plan to exploit other
regions of interest, for e.g. the manipulated object
regions, in order to avoid the ambiguous case of high
intra-class dissimilarity, where manipulated objects in
the same activity class may have different shapes, grip
types, and colors, which may be challenging for our
proposed regions of interest that focus only on hands’
motion and appearance.
REFERENCES
Abebe, G., Cavallaro, A., and Parra, X. (2016). Robust
multi-dimensional motion features for first-person vi-
sion activity recognition. Comput. Vis. Image Un-
derst., 149:229–248.
Avola, D., Bernardi, M., Cinque, L., Foresti, G. L., and
Massaroni, C. (2019). Exploiting recurrent neural net-
works and leap motion controller for the recognition
of sign language and semaphoric hand gestures. IEEE
Transactions on Multimedia, 21:234–245.
Babu, A. R., Zakizadeh, M., Brady, J., Calderon, D., and
Makedon, F. (2019). An intelligent action recogni-
tion system to assess cognitive behavior for execu-
tive function disorder. 2019 IEEE 15th International
Conference on Automation Science and Engineering
(CASE), pages 164–169.
Bambach, S. (2015). A survey on recent advances of com-
puter vision algorithms for egocentric video. ArXiv,
abs/1501.02825.
Bambach, S., Lee, S., Crandall, D. J., and Yu, C. (2015).
Lending a hand: Detecting hands and recognizing ac-
tivities in complex egocentric interactions. 2015 IEEE
International Conference on Computer Vision (ICCV),
pages 1949–1957.
Boutaleb, Y., Soladi
´
e, C., Duong, N.-D., Kacete, A.,
Royan, J., and S
´
eguier, R. (2021). Efficient multi-
stream temporal learning and post-fusion strategy for
3d skeleton-based hand activity recognition. In VISI-
GRAPP.
Cao, C., Zhang, Y., Wu, Y., Lu, H., and Cheng, J. (2017).
Egocentric gesture recognition using recurrent 3d con-
volutional neural networks with spatiotemporal trans-
former modules. 2017 IEEE International Conference
on Computer Vision (ICCV), pages 3783–3791.
Chaves, E., Gonc¸alves, C. B., Albertini, M., Lee, S., Jeon,
G., and Fernandes, H. (2020). Evaluation of trans-
fer learning of pre-trained cnns applied to breast can-
cer detection on infrared images. Applied optics, 59
17:E23–E28.
Damen, D., Doughty, H., Farinella, G., Fidler, S., Furnari,
A., Kazakos, E., Moltisanti, D., Munro, J., Perrett,
T., Price, W., and Wray, M. (2018). Scaling ego-
centric vision: The epic-kitchens dataset. ArXiv,
abs/1804.02748.
fang Hu, J., Zheng, W.-S., Lai, J.-H., and Zhang, J. (2015).
Jointly learning heterogeneous features for rgb-d ac-
tivity recognition. In CVPR.
Fathi, A., Ren, X., and Rehg, J. M. (2011). Learning to
recognize objects in egocentric activities. CVPR 2011,
pages 3281–3288.
Feichtenhofer, C., Pinz, A., and Zisserman, A. (2016). Con-
volutional two-stream network fusion for video action
recognition. 2016 IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 1933–
1941.
Garcia-Hernando, G., Yuan, S., Baek, S., and Kim, T.-K.
(2018). First-person hand action benchmark with rgb-
d videos and 3d hand pose annotations.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
846

Girshick, R. B., Donahue, J., Darrell, T., and Malik, J.
(2014). Rich feature hierarchies for accurate object
detection and semantic segmentation. 2014 IEEE
Conference on Computer Vision and Pattern Recog-
nition, pages 580–587.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. B. (2020).
Mask r-cnn. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 42:386–397.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural Computation, 9:1735–1780.
Irani, M. and Anandan, P. (1999). About direct methods. In
Workshop on Vision Algorithms.
Ji, S., Xu, W., Yang, M., and Yu, K. (2013). 3d convolu-
tional neural networks for human action recognition.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 35:221–231.
Karpathy, A., Toderici, G., Shetty, S., Leung, T., Suk-
thankar, R., and Fei-Fei, L. (2014). Large-scale
video classification with convolutional neural net-
works. 2014 IEEE Conference on Computer Vision
and Pattern Recognition, pages 1725–1732.
Khan, A. U. and Borji, A. (2018). Analysis of hand seg-
mentation in the wild. 2018 IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
4710–4719.
Kl
¨
aser, A., Marszalek, M., and Schmid, C. (2008). A spatio-
temporal descriptor based on 3d-gradients. In BMVC.
Kondratyuk, D., Yuan, L., Li, Y., Zhang, L., Tan, M.,
Brown, M., and Gong, B. (2021). Movinets: Mobile
video networks for efficient video recognition. ArXiv,
abs/2103.11511.
Laptev, I., Marszalek, M., Schmid, C., and Rozenfeld,
B. (2008). Learning realistic human actions from
movies. 2008 IEEE Conference on Computer Vision
and Pattern Recognition, pages 1–8.
Li, X., Hou, Y., Wang, P., Gao, Z., Xu, M., and Li, W.
(2021). Trear: Transformer-based rgb-d egocentric
action recognition. ArXiv, abs/2101.03904.
Liu, S. and Deng, W. (2015). Very deep convolutional
neural network based image classification using small
training sample size. 2015 3rd IAPR Asian Confer-
ence on Pattern Recognition (ACPR), pages 730–734.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu,
C.-Y., and Berg, A. (2016). Ssd: Single shot multibox
detector. In ECCV.
Liu, Y., Jiang, X., Sun, T., and Xu, K. (2019). 3d gait
recognition based on a cnn-lstm network with the fu-
sion of skegei and da features. 2019 16th IEEE Inter-
national Conference on Advanced Video and Signal
Based Surveillance (AVSS), pages 1–8.
Ma, M., Fan, H., and Kitani, K. M. (2016). Going deeper
into first-person activity recognition. 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 1894–1903.
Min, K. and Corso, J. J. (2020). Integrating human gaze into
attention for egocentric activity recognition. ArXiv,
abs/2011.03920.
Nguyen, X. S., Brun, L., L
´
ezoray, O., and Bougleux, S.
(2019). A neural network based on spd manifold
learning for skeleton-based hand gesture recognition.
2019 IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), pages 12028–12037.
Ohn-Bar, E. and Trivedi, M. M. (2014). Hand gesture recog-
nition in real time for automotive interfaces: A multi-
modal vision-based approach and evaluations. IEEE
Transactions on Intelligent Transportation Systems,
15:2368–2377.
Oreifej, O. and Liu, Z. (2013). Hon4d: Histogram of ori-
ented 4d normals for activity recognition from depth
sequences. 2013 IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 716–723.
Poleg, Y., Arora, C., and Peleg, S. (2014). Temporal seg-
mentation of egocentric videos. 2014 IEEE Confer-
ence on Computer Vision and Pattern Recognition,
pages 2537–2544.
Rahmani, H. and Mian, A. S. (2016). 3d action recogni-
tion from novel viewpoints. 2016 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 1506–1515.
Ramirez-Amaro, K., Beetz, M., and Cheng, G. (2017).
Transferring skills to humanoid robots by extracting
semantic representations from observations of human
activities. Artif. Intell., 247:95–118.
Rastgoo, R., Kiani, K., and Escalera, S. (2020). Hand sign
language recognition using multi-view hand skeleton.
Expert Syst. Appl., 150:113336.
Rawat, W. and Wang, Z. (2017). Deep convolutional neural
networks for image classification: A comprehensive
review. Neural Computation, 29:2352–2449.
Ren, S., He, K., Girshick, R. B., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 39:1137–1149.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M. S., Berg, A., and Fei-Fei, L. (2015). Ima-
genet large scale visual recognition challenge. Inter-
national Journal of Computer Vision, 115:211–252.
Ryoo, M., Rothrock, B., and Matthies, L. (2015). Pooled
motion features for first-person videos. 2015 IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 896–904.
Sandler, M., Howard, A. G., Zhu, M., Zhmoginov, A., and
Chen, L.-C. (2018). Mobilenetv2: Inverted residuals
and linear bottlenecks. 2018 IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
4510–4520.
Scovanner, P., Ali, S., and Shah, M. (2007). A 3-
dimensional sift descriptor and its application to ac-
tion recognition. Proceedings of the 15th ACM inter-
national conference on Multimedia.
Shan, D., Geng, J., Shu, M., and Fouhey, D. F. (2020). Un-
derstanding human hands in contact at internet scale.
Multi-stage RGB-based Transfer Learning Pipeline for Hand Activity Recognition
847

2020 IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), pages 9866–9875.
Sigurdsson, G. A., Gupta, A., Schmid, C., Farhadi, A.,
and Karteek, A. (2018). Charades-ego: A large-scale
dataset of paired third and first person videos. ArXiv.
Singh, S., Arora, C., and Jawahar, C. V. (2016). First per-
son action recognition using deep learned descriptors.
2016 IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 2620–2628.
Sridhar, S., Feit, A. M., Theobalt, C., and Oulasvirta, A.
(2015). Investigating the dexterity of multi-finger in-
put for mid-air text entry. In CHI ’15.
Sudhakaran, S., Escalera, S., and Lanz, O. (2019). Lsta:
Long short-term attention for egocentric action recog-
nition. 2019 IEEE/CVF Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 9946–
9955.
Sudhakaran, S. and Lanz, O. (2017). Convolutional long
short-term memory networks for recognizing first per-
son interactions. 2017 IEEE International Confer-
ence on Computer Vision Workshops (ICCVW), pages
2339–2346.
Sudhakaran, S. and Lanz, O. (2018). Attention is all we
need: Nailing down object-centric attention for ego-
centric activity recognition. ArXiv, abs/1807.11794.
Surie, D., Pederson, T., Lagriffoul, F., Janlert, L.-E., and
Sj
¨
olie, D. (2007). Activity recognition using an ego-
centric perspective of everyday objects. In UIC.
Tadesse, G. and Cavallaro, A. (2018). Visual features for
ego-centric activity recognition: a survey. Proceed-
ings of the 4th ACM Workshop on Wearable Systems
and Applications.
Tammina, S. (2019). Transfer learning using vgg-16 with
deep convolutional neural network for classifying im-
ages. International journal of scientific and research
publications, 9:9420.
Taylor, G. W., Fergus, R., LeCun, Y., and Bregler, C.
(2010). Convolutional learning of spatio-temporal
features. In ECCV.
Tekin, B., Bogo, F., and Pollefeys, M. (2019). H+o: Unified
egocentric recognition of 3d hand-object poses and in-
teractions. 2019 IEEE/CVF Conference on Computer
Vision and Pattern Recognition (CVPR), pages 4506–
4515.
Tran, D., Bourdev, L. D., Fergus, R., Torresani, L., and
Paluri, M. (2015). Learning spatiotemporal features
with 3d convolutional networks. 2015 IEEE Interna-
tional Conference on Computer Vision (ICCV), pages
4489–4497.
Vemulapalli, R., Arrate, F., and Chellappa, R. (2014). Hu-
man action recognition by representing 3d skeletons
as points in a lie group. 2014 IEEE Conference on
Computer Vision and Pattern Recognition, pages 588–
595.
Verma, S., Nagar, P., Gupta, D., and Arora, C. (2018). Mak-
ing third person techniques recognize first-person ac-
tions in egocentric videos. 2018 25th IEEE Interna-
tional Conference on Image Processing (ICIP), pages
2301–2305.
Wang, H., Kl
¨
aser, A., Schmid, C., and Liu, C. (2012).
Dense trajectories and motion boundary descriptors
for action recognition. International Journal of Com-
puter Vision, 103:60–79.
Willems, G., Tuytelaars, T., and Gool, L. (2008). An effi-
cient dense and scale-invariant spatio-temporal inter-
est point detector. In ECCV.
Wu, Y., Kirillov, A., Massa, F., Lo, W.-Y.,
and Girshick, R. (2019). Detectron2.
https://github.com/facebookresearch/detectron2.
Xie, S., Girshick, R. B., Doll
´
ar, P., Tu, Z., and He, K.
(2017). Aggregated residual transformations for deep
neural networks. 2017 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 5987–
5995.
Ying, X. (2019). An overview of overfitting and its solu-
tions.
Zhang, X., Wang, Y., Gou, M., Sznaier, M., and Camps, O.
(2016). Efficient temporal sequence comparison and
classification using gram matrix embeddings on a rie-
mannian manifold. 2016 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR).
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
848
