
LiDAR Dataset Distillation within Bayesian Active Learning Framework
Understanding the Effect of Data Augmentation
Anh Ngoc Phuong Duong, Alexandre Almin, Léo Lemarié and B. Ravi Kiran
a
Machine Learning, Navya, France
Keywords:
Active Learning, Point Clouds, Semantic Segmentation, Data Augmentation, Label Efficiency, Dataset
Distillation.
Abstract:
Autonomous driving (AD) datasets have progressively grown in size in the past few years to enable better
deep representation learning. Active learning (AL) has re-gained attention recently to address reduction of
annotation costs and dataset size. AL has remained relatively unexplored for AD datasets, especially on
point cloud data from LiDARs. This paper performs a principled evaluation of AL based dataset distillation
on (1/4th) of the large Semantic-KITTI dataset. Further on, the gains in model performance due to data
augmentation (DA) are demonstrated across different subsets of the AL loop. We also demonstrate how DA
improves the selection of informative samples to annotate. We observe that data augmentation achieves full
dataset accuracy using only 60% of samples from the selected dataset configuration. This provides faster
training time and subsequent gains in annotation costs.
1 INTRODUCTION
Autonomous driving has witnessed a recent increase
in research and industry-based large-scale datasets
in the point cloud domain such as Semantic-KITTI
(Behley et al., 2019) and Nuscenes (Caesar et al.,
2020). These datasets enable diverse driving scenar-
ios and lighting conditions, along with variation in
the poses of on-road obstacles. The collection pro-
cedure frequently involves recording temporal seg-
ments with key frames that are manually selected.
However, these large-scale point clouds datasets have
high redundancy, especially in training Deep Neu-
ral Network (DNN) architectures. This is mainly
due to the temporal correlation between point clouds
scans, the similar urban environments and the sym-
metries in the driving environment (driving in oppo-
site directions at the same location). Hence, data re-
dundancy can be seen as the similarity between any
pair of point clouds resulting from geometric trans-
formations as a consequence of ego-vehicle move-
ment along with changes in the environment. Data
augmentations (DA) are transformations on the input
samples that enable DNNs to learn invariances and/or
equivariances to said transformations (Anselmi et al.,
2016). DA provides a natural way to model the geo-
a
https://orcid.org/0000-0002-8641-7530
metric transformations to point clouds in large-scale
datasets due to ego-motion of the vehicle.
Active Learning (AL) is an established field that
aims at interactively annotating unlabeled samples
guided by a human expert in the loop. With existing
large datasets, AL could be used to find a core-subset
with equivalent performance w.r.t a full dataset. This
involves iteratively selecting subsets of the dataset
that greedily maximises model performance. As a
consequence, AL helps reduce annotation costs, while
preserving high accuracy. AL distills an existing
dataset to a smaller subset, thus enabling faster train-
ing times in production. It uses uncertainty scores ob-
tained from predictions of a model or an ensemble to
select informative new samples to be annotated by a
human oracle. Uncertainty-based sampling is a well-
established component of AL frameworks today (Set-
tles, 2009).
This paper studies the dataset distillation or re-
duction of redundant samples on point clouds from
the Semantic-KITTI dataset. We note that Semantic-
KITTI with 23201 point cloud samples was gener-
ated by continuous motion of the ego-vehicle in ur-
ban environments in Germany. After testing differ-
ent options to evaluate uncertainty, we show that DA
techniques, if carefully chosen and applied, can im-
prove the selection of informative samples in an AL
pipeline. Contributions of the current study include:
Duong, A., Almin, A., Lemarié, L. and Kiran, B.
LiDAR Dataset Distillation within Bayesian Active Learning Framework Understanding the Effect of Data Augmentation.
DOI: 10.5220/0010860800003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
159-167
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
159

1. An evaluation of Bayesian AL methods on a large
point cloud dataset for semantic segmentation.
2. Evaluating existing heuristic function, BALD
(Houlsby et al., 2011) for the semantic seg-
mentation task within a standardized AL library
(Atighehchian et al., 2019)(Atighehchian et al.,
2020). The BALD heuristic used in conjunction
with DA techniques shows a high labeling effi-
ciency on a 6000 sample subset of the Semantic-
KITTI dataset.
3. Key ablation studies on informativeness of dataset
samples vs data augmented samples that reflect
how DA affects the quality of AL based sam-
pling/acquisition function.
4. A competitive compression over the baseline ac-
curacy while using only 60% of the dataset under
study.
Like many previous studies on AL, we do not explic-
itly quantify the amount of redundancy in the datasets
and purely determine the trade-off of model perfor-
mance with smaller subsets w.r.t the original dataset.
2 RELATED WORK
The reader can find details on the major approaches
to AL in the following articles: uncertainty-based
approaches (Gal et al., 2017), diversity-based ap-
proaches (Sener and Savarese, 2018), and a combi-
nation of the two (Kirsch et al., 2019)(Ash et al.,
2020). Most of these studies were aimed at classi-
fication tasks. Adapting diversity-based frameworks
usually applied to a classification, such as (Sener and
Savarese, 2018), (Kirsch et al., 2019), (Ash et al.,
2020), to the point cloud semantic segmentation task
is computationally costly. This is due to the dense out-
put tensor from DNNs with a class probability vector
per pixel, while the output for the classification task
is a single class probability vector per image. Var-
ious authors in (Kendall and Gal, 2017)(Golestaneh
and Kitani, 2020), Camvid (Brostow et al., 2009) and
Cityscapes(Cordts et al., 2016) propose uncertainty-
based methods for image and video segmentation.
However, very few AL studies are conducted for point
cloud semantic segmentation. Authors (Wu et al.,
2021) evaluate uncertainty and diversity-based ap-
proaches for point cloud semantic segmentation. This
study is the closest to our current work.
Authors (Birodkar et al., 2019) demonstrate the
existence of redundancy in CIFAR-10 and ImageNet
datasets, using agglomerative clustering in a seman-
tic space to find redundant groups of samples. As
shown by (Chitta et al., 2019), techniques like en-
semble active learning can reduce data redundancy
significantly on image classification tasks. Authors
(Beck et al., 2021) show that diversity-based methods
are more robust compared to standalone uncertainty
methods against highly redundant data. Though au-
thors suggest that with the use of DA, there is no sig-
nificant advantage of diversity over uncertainty sam-
pling. Nevertheless, the uncertainty was not quanti-
fied in the original studied datasets, but were artifi-
cially added through sample duplication. This does
not represent real word correlation between sample
images or point clouds. Authors (Hong et al., 2020)
uses DA techniques while adding the consistency loss
within a semi-supervised learning setup for image
classification task.
3 METHOD
In this section, we describe our setup used to eval-
uate the performances of AL for point cloud seman-
tic segmentation, including dataset setup, DNN model
architecture, the chosen DA techniques, and most im-
portantly the setup on our AL experiments.
Dataset. Although there are many datasets for im-
age semantic segmentation, few are dedicated to point
clouds. The Semantic-KITTI dataset & benchmark
by authors (Behley et al., 2019) provides more than
43000 point clouds of 22 annotated sequences, ac-
quired with a Velodyne HDL-64 LiDAR. Semantic-
KITTI is by far the most extensive dataset with se-
quential information. All available annotated point
clouds, from sequences 00 to 10, for a total of 23201
point clouds, are later randomly sampled, and used
for our experiments.
Model. Among different deep learning models
available, we choose SqueezeSegV2 (Wu et al.,
2018), a spherical-projection-based semantic segmen-
tation model, which performs well with a fast infer-
ence speed compared to other architectures, thus re-
duces training and uncertainty computation time. We
apply spherical projection (Wu et al., 2018) on point
clouds to obtain a 2D range image as an input for the
network shown in figure 1. To simulate Monte Carlo
(MC) sampling for uncertainty estimation (Gal and
Ghahramani, 2016), a 2D Dropout layer is added right
before the last convolutional layer of SqueezeSegV2
(Wu et al., 2018) with a probability of 0.2 and turned
on at test time.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
160
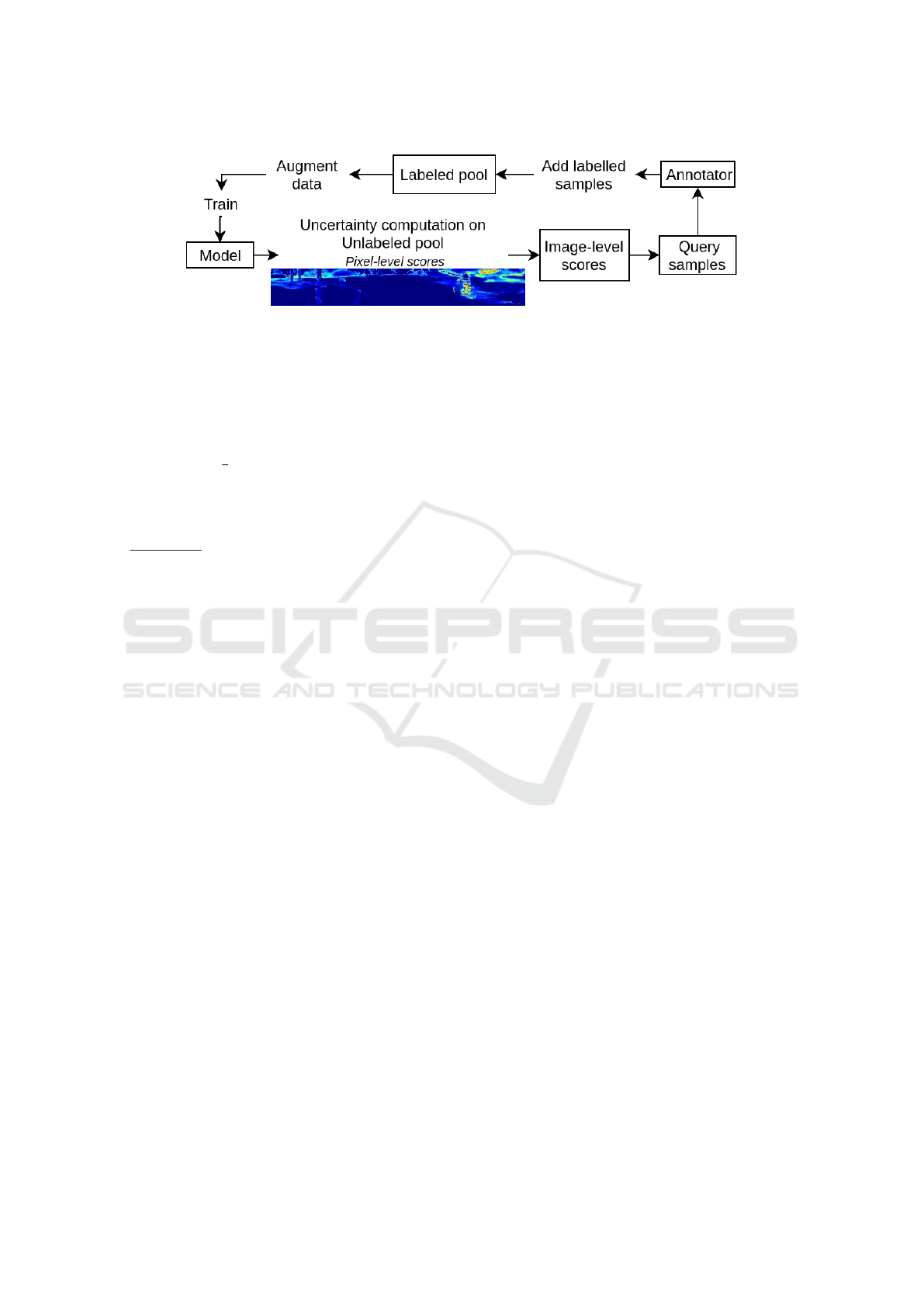
Figure 1: Global flow of active learning on range images from point clouds using uncertainty methods.
Spherical Projection. Rangenet++ architectures by
authors (Milioto et al., 2019) use range image based
spherical coordinate representations of point clouds
to enable the use of 2D-convolution kernels. The re-
lationship between range image and LiDAR coordi-
nates is the following:
u
v
=
1
2
[1 − arctan(y,x)π
−1
] × w
[1 − (arcsin(z × r
−1
) + f
up
) × f
−1
] × h
,
where (u,v) are image coordinates, (h,w) the height
and width of the desired range image, f = f
up
+
f
down
, is the vertical f ov of the sensor, and r =
p
x
2
+ y
2
+ z
2
, range measurement of each point. The
input to the DNNs used in our study are images of size
W × H × 4, with spatial dimensions W,H determined
by the FOV and angular resolution, and 4 channels
containing the x,y coordinates of points, r range or
depth to each point, i intensity or remission value for
each point.
Bayesian Uncertainty-based Approach of AL. In
a supervised learning setup, given a dataset D :=
{(x
1
,y
1
),(x
2
,y
2
),...,(x
N
,y
N
)} ⊂ X × Y , the DNN is
seen as a high dimensional function f
ω
: X → Y with
model parameters ω. A simple classifier maps each
input x to outcomes y. A good classifier minimizes
the empirical risk l : Y × Y → R, which is defined
with the expectation R
emp
( f ) := P
X,Y
[Y 6= f (X)]. The
optimal classifier is one that minimizes the above risk.
Thus, the classifier’s loss does not explicitly refer to
sample-wise uncertainty but rather to obtain a func-
tion which makes good predictions on average.
Predictive uncertainty (Hüllermeier and Waege-
man, 2021) estimates uncertainty over each prediction
ˆy = f
ω
(x) = p(y|x) given its input x. A model’s pre-
dictive uncertainty is a combination of the aleatoric
uncertainty, irreducible uncertainty due to intrinsic
randomness of underlying process, and the epistemic
uncertainty, reducible uncertainty caused due to miss-
ing knowledge, and could be reduced given additional
information.
Authors (Gal and Ghahramani, 2016) propose
generation of MC samples for a given model and in-
put, by activating standard dropout layers at inference
time. This provides an uncertainty estimation by sam-
pling different values of DNN weights. Readers can
consult work by (Gawlikowski et al., 2021) for uncer-
tainty estimation in DNNs.
Key Components of AL Framework. We shall use
the following terminologies to describe our AL train-
ing setup.
1. Labeled dataset D = {(x
i
,y
i
)}
N
i=1
where x
i
∈ W ×
H × 4 are range images with 4 input channels,
W,H are spatial dimensions, and y
i
∈ W × H ×C
are one-hot encoded ground truth with C classes.
The output of the DNN model is distinguished
from the ground truth as ˆy
i
with the same dimen-
sions.
2. Labeled pool L ⊂ D and a unlabeled pool U ⊂
D considered as a data with/without any ground-
truth, where at any AL-step L∪U = D, the subsets
are disjoint and restore the full dataset.
3. Query size B, also called a budget, to fix the num-
ber of unlabeled samples selected for labeling
4. Acquisition function, known as heuristic, provid-
ing a score for each pixel given the output ˆy
i
of the
DNN model, f : R
W ×H×C
→ R
W ×H
5. Including the usage of MC iterations the output
of the DNN model could provide several outputs
given the same model and input, ˆy
i
∈ W ×H ×C×
T where T refers to the number of MC iterations.
6. Subset model f
L
is the model trained on labeled
subset L
7. Aggregation function a : R
W ×H×C×T
→ R
+
is a
function that aggregates heuristic scores across all
pixels in the input image into a positive scalar
value, which is used to rank samples in the un-
labeled pool.
Heuristic. Heuristic functions are transformations
over the model output probabilities p(y|x) that define
uncertainty-based metrics to rank and select informa-
tive examples from the unlabeled pool at each AL-
LiDAR Dataset Distillation within Bayesian Active Learning Framework Understanding the Effect of Data Augmentation
161

step. We used the following uncertainty-based met-
rics in our experiments:
1. Certainty heuristic measures the least confident
class probability across the highest confident predic-
tion over different MC iterations :
min
y
max
i
{ f
ω
(x)}
T
i=1
where T is the number of MC iterations.
2. Entropy heuristic measures the entropy over
predicted class probabilities
H(y|x,L) = −
m
∑
c
p(y = c|x,L)log(p(y = c|x,L))
3. Variance computes the variance of predictions
from model parameters for each class, then averages
all variances from all classes to obtain the aggregated
score for a sample in classification, or a pixel in im-
age semantic segmentation. The heuristic selects the
samples having the highest aggregated scores. The
variance for each class σ
2
(p(y = c|x, L)) is:
1
T
T
∑
i=1
(p(y = c|x, w
i
|L) − p(y = c|x,L))
2
(1)
4. BALD (Houlsby et al., 2011) selects sam-
ples maximizing information gain between the pre-
dictions from model parameters, using MC Itera-
tions. The expectation in the equation below is per-
formed over model parameters ω. The information
gain I(y,ω|x,L) is given by
H(y|x,L) − E
p(ω|L)
(H(y|x,ω)) (2)
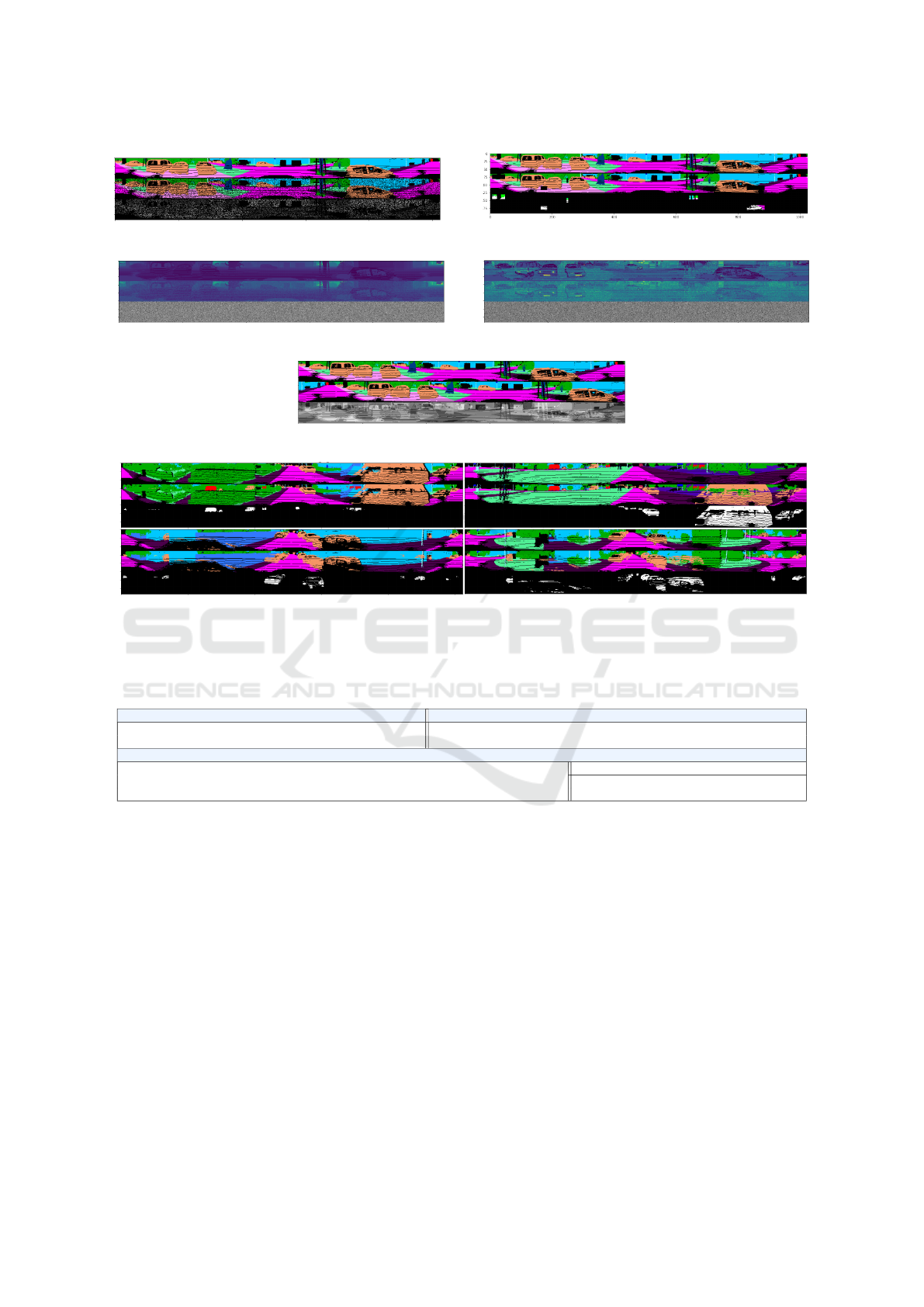
Data Augmentations on Range Images. We apply
DA directly on the range image projection. We se-
lected known effective transformations: (a) Random
dropout mask on range image and its target by cre-
ating a binary mask with uniform dropout probabil-
ity p ∈ [0.1,0.5]; (b) CoarseDropout which randomly
masks out rectangular regions by applying with the
following parameters: max_height: 16, max_holes:
5, max_width: 64, min_height: 1, min_holes: 2,
min_width: 1; (c) Gaussian noise on depth of range
image by with the following parameters µ = 0,σ
2
∈
[0.05,0.1] ; (d) Gaussian noise on remission chan-
nel of range image with the following parameters:
µ = 0,σ
2
∈ [0.5,1.0]; (e) Random cyclic shift on range
image (corresponding to rotations on point cloud) and
its target to left and right, from 0 to 22.5 degrees
around the center; (f) Instance Cut Paste randomly
copying and pasting instances from one scan to an-
other within a batch. More description and experi-
ment setup of these transformations are in figure 2.
Evaluation Metrics. To evaluate the performance
of our experiments we are using the following met-
rics:
1. MeanIoU Intersection over Union (IoU) (Song
et al., 2016), known as Jaccard index, measures the
number of common pixels between the target and pre-
diction masks over the total number of pixels. Mean-
IoU (mIoU) is mean value of IoU over all classes.
Given T P
c
, FP
c
, and FN
c
as the number of true pos-
itive, false positive, and false negative predictions for
class c, and C is the number of classes, MeanIoU can
be formulated as
1
C
C
∑
c=1
T P
c
T P
c
+ FP
c
+ FN
c
(3)
2. Labeling efficiency Authors (Beck et al.,
2021) use the labeling efficiency (LE) to compare
the amount of data needed among different sampling
techniques with respect to a baseline. In our ex-
periments, instead of accuracy, we use MeanIoU as
the performance metric. Given a specific value of
MeanIoU, the labeling efficiency is the ratio between
the number of labeled range images, acquired by the
baseline sampling and the other sampling techniques.
LE =
n
labeled_others
(MeanIoU = a)
n
labeled_baseline
(MeanIoU = a)
(4)
The baseline method is usually the random heuristic.
Experimental Setup. As seen in figure 1 we fol-
low a Bayesian AL using MC Dropout. The heuristic
computes uncertainty scores for each pixel. To obtain
the final score per range image, we use sum as an ag-
gregation function to combine all pixel-wise scores of
an image into a single score. At each AL step, the
unlabeled pool is ranked w.r.t the aggregated score.
A new query of samples limited to the budget size is
selected from the ranked unlabeled pool. The total
number of AL steps is indirectly defined by budget
size, n
AL
=
|
D
|
/B
Based on this pipeline, we made AL runs across
different heuristics: random, BALD (Houlsby et al.,
2011), entropy and certainty, with and without the ap-
plication of DA applied during training time. As men-
tioned in Table 1, we only use 6000 randomly chosen
samples from Semantic-KITTI over the 23201 sam-
ples available, because every experiment is very time-
consuming, and our resources were limited. At each
training step, we reset model weights to avoid biases
in the predictions, as proven by (Beck et al., 2021).
In order to evaluate the performances of our
pipeline over each experiment, on test set we use
LE and MeanIoU as our metrics. Finally, to speed
up the training steps, we use early stopping based
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
162
(a) Random dropout mask (b) CoarseDropout of Albumentations library
(c) Gaussian noise applied on depth channel (d) Gaussian noise applied on remission channel
(e) Random cyclic shift range image
(f) Instance Cut Paste
Figure 2: Before and after applying transformations on Semantic-KITTI. Each image corresponds to a sample such that inner
images, from top to bottom, are before and after applying transformations, and the error between them. a, b, c, d are directly
used or customized based on Albumentations library (Buslaev et al., 2020).
Table 1: Common experiments settings to each active learning (AL) run.
Data related parameters AL Hyper parameters
Range image resolution Total pool size Test pool size Init set size Budget MC Dropout AL steps Aggregation
1024x64 6000 2000 240 240 0.2 25 sum
Hyper parameters for each AL step
Max train iterations Learning rate (LR) LR decay Weight decay Batch size
Early stopping
Evaluation period Metric Patience
100000 0.01 0.99 0.0001 16 500 train mIoU 15
on the stability of training MeanIoU over patience ∗
evaluation_period iterations.
4 EXPERIMENTS
Based on previously described AL configurations, we
investigate (A) which heuristic performs the best on
semantic segmentation for point clouds, (B) the im-
pact of DA techniques on LE, (C) the informativeness
of dataset vs data augmented samples across AL steps
and (D) finally the DNN model’s stability for sample
selection.
A. Heuristic Performances on Dataset Compres-
sion. Firstly, we evaluated the performances of the
random heuristic, which is our baseline method. Each
complete AL run can achieve the goal performance
using fewer number of labeled samples (Figure 3).
BALD outperforms other heuristics, allowing the
model to converge faster with the highest LE ratio.
To focus on our study on DA, we restrict our focus
to the BALD and random heuristics for the rest of the
experiments.
B. Data Augmentation Performances on Dataset
Distillation. In this experiment, DA techniques are
applied at training time. On both random and BALD
heuristics, figure 5 shows that DA helps the model
to reach the baseline accuracy on test set faster com-
pared to runs without DA. DA provides a significant
improvement in the early AL-steps when the subset
size are small, as one expects.
LiDAR Dataset Distillation within Bayesian Active Learning Framework Understanding the Effect of Data Augmentation
163
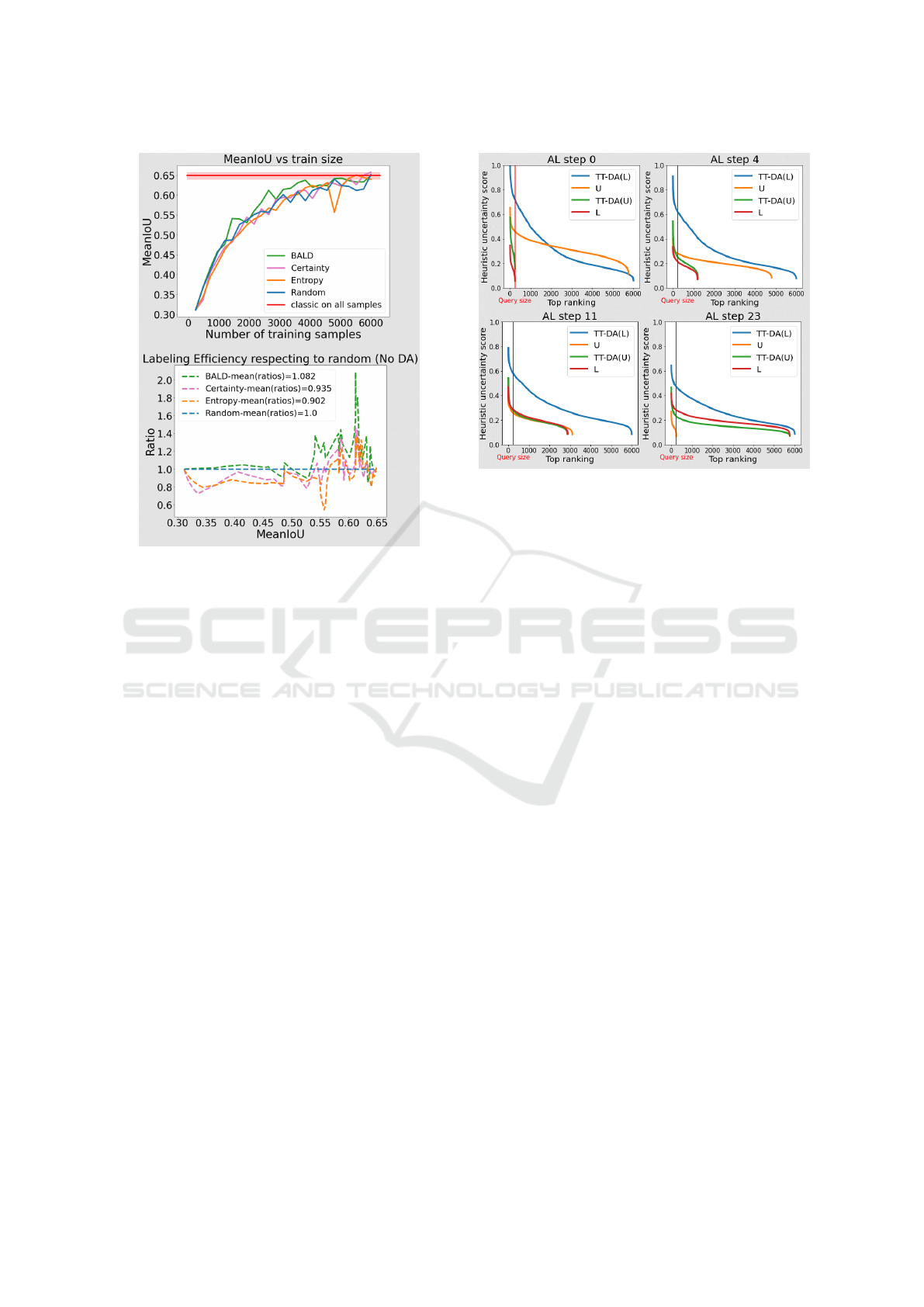
Figure 3: MeanIoU vs number of training samples and la-
beling efficiency evaluated on test set. Using 100% of avail-
able samples at the end of each run allows us to define an
average top performance.
DA provides better generalization by regulariza-
tion. Model output probabilities are confident for
dataset samples that are similar to DA samples from
the labeled pool. In other words, with DA, the model
tends to select samples different from the trained sam-
ples and their transformations, and thus reduces re-
dundancy. BALD with DA can achieve an important
dataset distillation, by using only 60% of the total
sample pool and still achieving baseline accuracy.
C. Heuristic Evaluation on Data Augmented Sam-
ples. In an effort to understand how data augmented
samples affect the heuristic function we evaluated the
heuristic function using models trained without DA
while predicting on test time augmented images. We
evaluated the aggregated heuristic scores for BALD
over firstly the labeled and unlabeled pools, secondly
we use Test-Time Data Augmentations (TT-DA) on
both labeled and unlabeled pool samples (Figure 4)
at different AL steps. To be clear, we used models
with no DA during training for this experiment. (TT-
DA(L)) is generated by applying DA at test time on the
Labeled pool (L) at each training epoch. (TT-DA(U))
contains augmented samples from the Unlabeled pool
(U). We ensure that the combined sizes of (TT-DA(U))
and (U) is always equal to 6000 samples.
In figure 4 the sorted aggregated scores a to the
Figure 4: Aggregated heuristic score of samples sorted by
decreasing value.
left of the red line which defines the budget of each
AL-step, we notice the following ordering : These re-
sults show that in the early AL steps:
a(T T DA(L)) > a((U )) > a(T T DA(U )) > a((L))
and in final AL steps:
a(T T DA(L)) > a(T T DA(U)) > a((L)) > a((U))
We observe that during the initial AL step, the ag-
gregated score is low as expected on (L), which has
been used to train the model. Because the model has
been trained on only 240 samples from (L), the ag-
gregated score is very high on (U), (TT-DA(U)) and
(TT-DA(L)). As the AL step goes on, the aggregated
scores are globally decreasing, this can be explained
by the growing pool of selected data (L) used to train
the model. In the final AL step, (U) has the smallest
uncertainty scores as the model is now well trained
and able to correctly generalize on unseen samples.
The highest aggregated scores are related to DA sam-
ples from the labeled (TT-DA(L)) and unlabeled (TT-
DA(U)) pool. This could be because the DA is pro-
viding transformed samples that are now outside the
support of the dataset distribution.
D. Model Stability and Effectiveness for Sample
Selection. In this part, we study the model stability,
based on the mean variance computed on class prob-
abilities across all MC iterations. We also measure
the model sampling effectiveness by computing mean
BALD metric.
Across all AL steps (Figure 6), models with DA
become confident in earlier AL steps (on account of
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
164
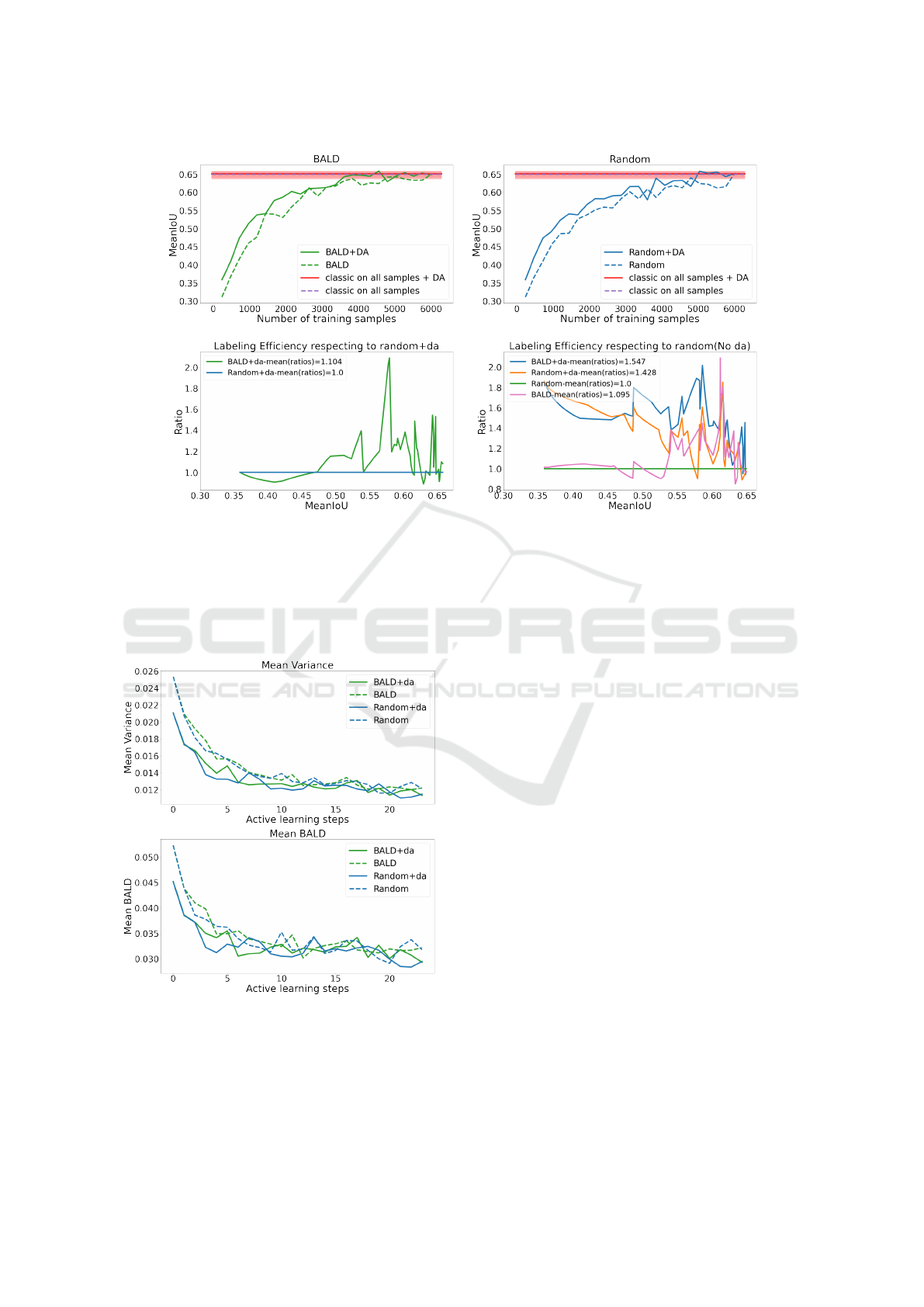
Figure 5: MeanIoU vs number of training samples and labeling efficiency evaluated on test set.
dropout), and are able to select samples that max-
imise information gain sooner w.r.t models without
DA. This experiment shows that DA improves the sta-
bility of models and allows a better and faster sample
selection by reducing the uncertainty of the heuristic
functions.
Figure 6: Mean of variances computed on class probabili-
ties over MC predictions (equation 1) and mean of BALD
(equation 2) for all pixels across all samples in the test set.
Key Future Challenges. Quantifying data redun-
dancy shall be investigated in our future study based
on work by authors in (Birodkar et al., 2019), (Guo
et al., 2021). To improve the heuristic function, re-
cent work (Lakshminarayanan et al., 2016) (Alling-
ham et al., 2021) on explicit ensembles shows strong
results for uncertainty computing, and (Aghdam et al.,
2019) show that adding temporal reasoning can be
beneficial for data selection on object detection task.
We aim to further our study by experiment on dif-
ferent budget sizes, while testing on the complete
Semantic-KITTI dataset. Another key issue in in-
dustrial datasets is the filtering or exclusion of cor-
rupted or outlier images/pointclouds from the AL
loop (Chitta et al., 2019) that frequently affect the
ranking of unlabeled pool samples. Finally, the last
but critical step in AL is the stopping criterion to ter-
minate any future input to the AL-pipeline, though
this is highly task and dataset dependent. A simple
rule can be thresholding the change in entropy over
model’s output class probabilities. It could also be
the incremental gain in the performance of the model.
A much more practical limit would be the budget of
human effort allocated to annotation.
5 CONCLUSION
Our work demonstrates the benefits of data augmen-
tation in active learning (AL) for point cloud semantic
segmentation task. It conforms with results by (Beck
et al., 2021) for the image classification task on CI-
FAR dataset. We observe that the effect of data aug-
LiDAR Dataset Distillation within Bayesian Active Learning Framework Understanding the Effect of Data Augmentation
165

mentation on BALD heuristic provides a robust and
efficient heuristic for sample selection. It not only
selects more uncertain samples at each AL step, but
also improves the heuristic function’s stability, sub-
sequently leading to improved label efficiency. With
only 60% of the samples, we reach the same accuracy
as a supervised training with the full selected subset.
The computing time gained by training the model on
the AL-selected subset from AL w.r.t training on the
original dataset could help gain few days to weeks.
Thus data augmentation within AL frameworks have
helped in reducing annotation costs as well as reduc-
ing training time in production over large datasets.
ACKNOWLEDGEMENTS
This work was granted access to HPC resources
of [TGCC/CINES/IDRIS] under the allocation
2021- [AD011012836] made by GENCI (Grand
Equipement National de Calcul Intensif). It is also
part of the Deep Learning Segmentation (DLS)
project financed by ADEME.
REFERENCES
Aghdam, H. H., Gonzalez-Garcia, A., Weijer, J. v. d., and
López, A. M. (2019). Active learning for deep detec-
tion neural networks. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
3672–3680.
Allingham, J. U., Wenzel, F., Mariet, Z. E., Mustafa,
B., Puigcerver, J., Houlsby, N., Jerfel, G., Fortuin,
V., Lakshminarayanan, B., Snoek, J., et al. (2021).
Sparse moes meet efficient ensembles. arXiv preprint
arXiv:2110.03360.
Anselmi, F., Rosasco, L., and Poggio, T. (2016). On
invariance and selectivity in representation learning.
Information and Inference: A Journal of the IMA,
5(2):134–158.
Ash, J. T., Zhang, C., Krishnamurthy, A., Langford, J., and
Agarwal, A. (2020). Deep batch active learning by
diverse, uncertain gradient lower bounds.
Atighehchian, P., Branchaud-Charron, F., Freyberg, J., Par-
dinas, R., and Schell, L. (2019). Baal, a bayesian
active learning library. https://github.com/ElementAI/
baal/.
Atighehchian, P., Branchaud-Charron, F., and Lacoste, A.
(2020). Bayesian active learning for production, a sys-
tematic study and a reusable library.
Beck, N., Sivasubramanian, D., Dani, A., Ramakrishnan,
G., and Iyer, R. (2021). Effective evaluation of deep
active learning on image classification tasks.
Behley, J., Garbade, M., Milioto, A., Quenzel, J., Behnke,
S., Stachniss, C., and Gall, J. (2019). Semantickitti:
A dataset for semantic scene understanding of lidar
sequences.
Birodkar, V., Mobahi, H., and Bengio, S. (2019). Seman-
tic redundancies in image-classification datasets: The
10don’t need.
Brostow, G. J., Fauqueur, J., and Cipolla, R. (2009). Seman-
tic object classes in video: A high-definition ground
truth database. Pattern Recognit. Lett., 30:88–97.
Buslaev, A., Iglovikov, V. I., Khvedchenya, E., Parinov, A.,
Druzhinin, M., and Kalinin, A. A. (2020). Albumen-
tations: Fast and flexible image augmentations. Infor-
mation, 11(2).
Caesar, H., Bankiti, V., Lang, A. H., Vora, S., Liong, V. E.,
Xu, Q., Krishnan, A., Pan, Y., Baldan, G., and Bei-
jbom, O. (2020). nuscenes: A multimodal dataset for
autonomous driving.
Chitta, K., Alvarez, J. M., Haussmann, E., and Farabet, C.
(2019). Training data subset search with ensemble ac-
tive learning. arXiv preprint arXiv:1905.12737.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding.
Gal, Y. and Ghahramani, Z. (2016). Dropout as a bayesian
approximation: Representing model uncertainty in
deep learning.
Gal, Y., Islam, R., and Ghahramani, Z. (2017). Deep
bayesian active learning with image data.
Gawlikowski, J., Tassi, C. R. N., Ali, M., Lee, J., Humt, M.,
Feng, J., Kruspe, A., Triebel, R., Jung, P., Roscher, R.,
Shahzad, M., Yang, W., Bamler, R., and Zhu, X. X.
(2021). A survey of uncertainty in deep neural net-
works.
Golestaneh, S. A. and Kitani, K. M. (2020). Importance of
self-consistency in active learning for semantic seg-
mentation.
Guo, J., Pang, Z., Sun, W., Li, S., and Chen, Y. (2021).
Redundancy removal adversarial active learning based
on norm online uncertainty indicator. Computational
Intelligence and Neuroscience, 2021.
Hong, S., Ha, H., Kim, J., and Choi, M.-K. (2020). Deep
active learning with augmentation-based consistency
estimation. arXiv preprint arXiv:2011.02666.
Houlsby, N., Huszár, F., Ghahramani, Z., and Lengyel, M.
(2011). Bayesian active learning for classification and
preference learning.
Hüllermeier, E. and Waegeman, W. (2021). Aleatoric and
epistemic uncertainty in machine learning: An intro-
duction to concepts and methods. Machine Learning,
110(3):457–506.
Kendall, A. and Gal, Y. (2017). What uncertainties do we
need in bayesian deep learning for computer vision?
Kirsch, A., van Amersfoort, J., and Gal, Y. (2019). Batch-
bald: Efficient and diverse batch acquisition for deep
bayesian active learning.
Lakshminarayanan, B., Pritzel, A., and Blundell, C.
(2016). Simple and scalable predictive uncertainty
estimation using deep ensembles. arXiv preprint
arXiv:1612.01474.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
166

Milioto, A., Vizzo, I., Behley, J., and Stachniss, C. (2019).
Rangenet++: Fast and accurate lidar semantic seg-
mentation. In 2019 IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS), pages
4213–4220. IEEE.
Sener, O. and Savarese, S. (2018). Active learning for con-
volutional neural networks: A core-set approach.
Settles, B. (2009). Active learning literature survey.
Song, S., Yu, F., Zeng, A., Chang, A. X., Savva, M., and
Funkhouser, T. (2016). Semantic scene completion
from a single depth image.
Wu, B., Zhou, X., Zhao, S., Yue, X., and Keutzer, K. (2018).
Squeezesegv2: Improved model structure and unsu-
pervised domain adaptation for road-object segmenta-
tion from a lidar point cloud.
Wu, T.-H., Liu, Y.-C., Huang, Y.-K., Lee, H.-Y., Su, H.-
T., Huang, P.-C., and Hsu, W. H. (2021). Redal:
Region-based and diversity-aware active learning for
point cloud semantic segmentation.
LiDAR Dataset Distillation within Bayesian Active Learning Framework Understanding the Effect of Data Augmentation
167
