
HRI-Gestures: Gesture Recognition for Human-Robot Interaction
Avgi Kollakidou
1,∗ a
, Frederik Haarslev
1,∗ b
, Cagatay Odabasi
2,∗ c
,
Leon Bodenhagen
1 d
and Norbert Kr
¨
uger
1 e
1
SDU Robotics, University of Southern Denmark, Campusvej 55, Odense C, Denmark
2
Fraunhofer IPA, Nobelstraße 12, Stuttgart, Germany
Keywords:
Action Recognition, Gesture Recognition, Human-Robot Interaction.
Abstract:
Most of people’s communication happens through body language and gestures. Gesture recognition in human-
robot interaction is an unsolved problem which limits the possible communication between humans and robots
in today’s applications. Gesture recognition can be considered as the same problem as action recognition which
is largely solved by deep learning, however, current publicly available datasets do not contain many classes
relevant to human-robot interaction. In order to address the problem, a human-robot interaction gesture dataset
is therefore required. In this paper, we introduce HRI-Gestures, which includes 13600 instances of RGB and
depth image sequences, and joint position files. A state of the art action recognition network is trained on
relevant subsets of the dataset and achieve upwards of 96.9% accuracy. However, as the network is designed
for the large-scale NTU RGB+D dataset, subpar performance is achieved on the full HRI-Gestures dataset.
Further enhancement of gesture recognition is possible by tailored algorithms or extension of the dataset.
1 INTRODUCTION
With the technological advancements within the field
of robotics, mobile robots are becoming more present
in our daily lives and are expected to play an even
bigger role in the future (Bodenhagen et al., 2019).
Improvements in sensor technology and vision algo-
rithms, especially deep learning, have widened the
market for mobile robots, as they can be deployed in
more use-cases. Deep learning has shown great po-
tential for tasks such as object detection, pose estima-
tion, object tracking, and action recognition.
In recent years, part of the focus has shifted from
improving the accuracy on public datasets, to mak-
ing the algorithms efficient enough to run on mo-
bile robots. This, combined with improvements in
edge hardware, has enabled robots to use, e.g., on-
line object detection for navigation (Chatterjee et al.,
2020). While object detection works robustly in un-
constrained environments, enabling robots to interact
with objects, interaction with humans is still a chal-
a
https://orcid.org/0000-0002-0648-4478
b
https://orcid.org/0000-0003-2882-0142
c
https://orcid.org/0000-0001-5241-2419
d
https://orcid.org/0000-0002-8083-0770
e
https://orcid.org/0000-0002-3931-116X
∗
Equal contribution between the authors
Figure 1: Examples of non-verbal cues used by humans and
their detected poses. Up: Stop; down: Get Attention.
lenge. A reason for this is that, while objects are in-
herently static, humans behave dynamically and their
actions are hard to predict.
One important facet of HRI is understanding in-
tentions. It is common for mobile robots to signal
their intention when navigating, e.g., through lights
(Palinko et al., 2020). Additionally, the establishment
of mutual gaze via animated eyes is used (Kr
¨
uger
et al., 2021). It is human nature to look into each oth-
ers eyes when communicating, and thus the intention
is instantly recognizable.
Kollakidou, A., Haarslev, F., Odabasi, C., Bodenhagen, L. and Krüger, N.
HRI-Gestures: Gesture Recognition for Human-Robot Interaction.
DOI: 10.5220/0010871200003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
559-566
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
559

An important problem lies with the robots’ abil-
ities to interpret humans’ intentions. One clear way
for a person to indicate their intention to a robot is
by expressing it verbally. Speech recognition has im-
proved significantly in the recent years as evident by
the emergence of personal assistants like Alexa and
Siri. Research has also been conducted on the use
of recent advancements in speech recognition in ver-
bal commands for robots (Tada et al., 2020). How-
ever, speech only accounts for 30% of communica-
tion (Hull, 2016). The rest is non-verbal communi-
cation cues, mainly body language and gestures (Fig-
ure 1). Hence, if robots are to be accepted as a part of
society, humans should be able to communicate with
them, possibly as they would with other humans. Ac-
cordingly, the ability to perceive gestures is important
in facilitating satisfactory HRI.
Gesture recognition entails perceiving how the
body moves and determining the meaning of that
movement. The problem can be split into three well-
defined subproblems: human pose estimation, track-
ing and action recognition. Human pose estimation
and object tracking are heavily researched topics and
are largely solved. Juel. et al. (2020) describe a sys-
tem for detection and tracking of objects and human
poses, designed for use on mobile robots. This sys-
tem is used for human pose detection and tracking
throughout this paper.
After detection and tracking of the human pose,
the last step in gesture recognition is interpreting the
movement of the poses. This is referred to, in liter-
ature, as action recognition and is also a well stud-
ied topic. Multiple large scale action recognition
datasets are currently publicly available (Kay et al.,
2017; Liu et al., 2020a). Besides being used as bench-
marks for action recognition algorithms, they can be
used to train algorithms for detection of various ac-
tivities in our daily lives, such as brushing teeth,
reading, drawing, and making pizza. However, they
only contain few classes which are relevant for non-
verbal communication, including nodding, shaking
head, thumb up, thumb down, and pointing to some-
thing. While these classes can be used to express
agreement/disagreement or to draw attention to some-
thing, they do not provide an expressive non-verbal
vocabulary and thus they are not sufficient for the
problem of gesture recognition in HRI.
Therefore, in order to facilitate HRI through non-
verbal communication recognition, a gesture dataset
is required. Such a dataset enables the training of
action recognition algorithms, which allow robots to
perceive the intentions of humans. For an action
recognition algorithm to work with the human pose
estimations from an online detector and tracker, it
(a) (b)
Figure 2: The skeleton models used in the (a) NTU RGB+D
and (b) COCO datasets.
needs to be trained on similar data. The dataset should
therefore contain the same pose labels as the output of
the human pose estimator used on the robot as well as
classes relevant in a HRI context. Such classes in-
clude gestures for getting the robot’s attention, mak-
ing it follow you, or making it stop (Figure 6). As
such a dataset is, to the best of our knowledge, not
available, the creation of one is necessary.
In this paper, the HRI-Gestures dataset
1
is pre-
sented. 4 RGB-D sensors are used to record 17 sub-
jects performing 15 interactive and 5 passive actions.
The interactive actions are gestures directed towards
a mobile robot, whereas the passive actions are hu-
man behaviors which a mobile robot might encounter
when navigating. 3D pose sequences are extracted
using the aforementioned human pose estimation and
tracking system. An action recognition network is
trained on subsets of the dataset created for specific
use case scenarios, resulting in gesture recognizers
which can be used as is in the relevant use cases.
2 RELATED WORK
In this section the current state of the art action recog-
nition algorithms and datasets are introduced. The
NTU RGB+D 120 dataset (Liu et al., 2020a) con-
sists of 120 classes and 114.480 action samples. It
contains multiple modalities, including RGB images,
depth maps, IR images and 2D and 3D skeletons, all
collected using a Kinect v2. Besides containing only
few classes for gesture recognition in HRI, another
1
Available at gitlab.sdu.dk/sdurobotics/HRI-Gestures
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
560

problem arises from the use of the Kinect to capture
the data. The Kinect skeleton tracking software which
is used for extracting the human pose labels has 25
joints in its skeleton model (Figure 2a). However,
the COCO keypoint dataset (Lin et al., 2014) which
is widely used for training human pose estimation al-
gorithms only contains 17 joints (Figure 2b). A robot
would therefore need to have a Kinect v2 in order to
obtain sequences which can directly be used for ac-
tion recognitiontha trained on NTU RGB+D 120.
The Kinetics 400 dataset (Kay et al., 2017) is an-
other large scale action recognition dataset consisting
of 400 classes and 306.245 action samples. The orig-
inal dataset only contains RGB videos, however, the
Kinetics Skeleton 400 dataset has been created from
it by using OpenPose (Cao et al., 2019) on the videos.
This results in 2D pose sequences with the same 17
joints as the output of other popular human pose es-
timators (Zhou et al., 2019; McNally et al., 2020), as
well as an 18th point in the center of the torso (joint
”0” in Figure 2b). While these poses can be used for
training action recognition algorithms which use the
same skeletons as what can commonly be detected on
a mobile robot, the lack of depth information poses a
problem. Some research (Liu et al., 2020b) shows that
skeleton-based action recognition algorithms perform
better when using 2D skeletons as input instead of
3D. However, when deploying the algorithm on mo-
bile robots the problem of egomotion arises. This is
better handled in 3D, as the poses can be transformed
to a static frame resulting in the 3D coordinates not
changing when the robot moves, thus eliminating the
problem of egomotion.
The dataset is the first part of the problem of ges-
ture recognition. The other part is the action recogni-
tion algorithm. Many different models for skeleton-
based action recognition have been proposed (Liu
et al., 2017; Thakkar and Narayanan, 2018; Song
et al., 2020, 2021), and most recent ones are based
on Spatial-Temporal Graph Convolutional Networks
(ST-GCN) as proposed by Yan et al. (2018). Graph
convolutions generalizes the common convolutional
layer, as they behave similarly but are not confined to
operating on a grid like structure. Instead they can
be used on any connected graph structure. ST-GCNs
treat skeleton pose sequences as graphs where joints
are connected spatially as seen on Figure 2, but also
temporally to the same joints at the previous time step.
Song et al. (2021) introduce the Richly Activated
Graph Convolutional Network (RA-GCN). It uses
multiple ST-GCN streams in a hierarchy where sub-
sequent streams learn discriminative features from in-
activated joints from the previous stream. Features
from all joints are thereby learned, making the net-
work robust to occlusion and jittering. This is ideal
in a mobile robotics context, as detections tend to be
noisy when captured online.
Gesture recognition for HRI, therefore, seems
possible with the framework presented in this work.
Training a state of the art action recognition algorithm
such as RA-GCN on a gesture dataset which contains
relevant classes for HRI and is created using the same
skeleton sequence modalities as what is available to
the mobile robot when operating in real-time.
3 GESTURE RECOGNITION
In order to recognize the gestures of people in the
vicinity of a robot, it needs to detect how the people
move their bodies and then infer a semantic mean-
ing from that movement. With the popularization
of using CNNs in computer vision, many previously
hard vision problems have become solvable as long as
enough labeled data specific to that problem is avail-
able. With the data available, the task lies in design-
ing a network which is able to learn from the available
data and generalize for unseen data instances. Given
the large amount of labeled human pose data which
is publicly available, human pose estimators gener-
alize enough to be used reliably on robots in uncon-
strained environments. However, the current focus in
action recognition research is not HRI, meaning that
labeled data relevant to gesture recognition for HRI is
not publicly available.
While the publicly available action recognition
datasets do not contain relevant data for HRI, they
have still driven research in action recognition lead-
ing to newer and better algorithms (Liu et al., 2017;
Thakkar and Narayanan, 2018; Song et al., 2020,
2021). While the gesture recognition for HRI is dif-
ferent than video analysis, the task is nevertheless
about deriving semantic meaning from sequences of
human poses, meaning that the already existing ac-
tion recognition algorithms should be transferable to
this new domain of gesture recognition for HRI, once
a suitable dataset is available.
3.1 Gesture Dataset
In order to address the problem of gesture recognition
on a mobile robot, the HRI-Gestures dataset is col-
lected. As the goal of HRI-Gestures is for the robot
to detect non-verbal communication during HRI, 15
interactive classes are chosen (Figure 6a-o) where a
person attempts to convey information or instructions
to the robot: Stop, Go right, Go left, Come here, Fol-
low me, Go away, Agree, Disagree, Go there, Get at-
HRI-Gestures: Gesture Recognition for Human-Robot Interaction
561

Figure 3: Visualization of the detection and tracking system
on people doing the Get Attention and Come Here action.
2D pose estimations are projected to 3D using the available
depth data and the people are assigned a unique ID using
the tracker. The 3D poses and ID’s are visualized together
with the point cloud.
tention, Be quiet, Don’t know, Turn around, Take this,
Pick up. As a robot is also likely to see people who are
not trying to interact with it, 5 passive classes are cho-
sen as well (Figure 6p-t): Standing still, Being seated,
Walking towards, Walking away, Talking on phone.
This results in 20 different classes for the dataset.
The dataset should contain the same modalities
the robot can obtain in real-time. Juel. et al. (2020)
describe a system for human pose detection and track-
ing made for mobile robots. The system can be used
to obtain 3D pose sequences of people in the field of
view of RGB-D cameras on the robot. It detects hu-
man poses in 2D, projects them to 3D using the avail-
able depth data, and then uses a tracker to sequence
the poses belonging to the same person (Figure 3). By
recording videos of gesture examples using RGB-D
sensors commonly found on mobile robots and then
using the pose detection and tracking system to ex-
tract pose sequences, the HRI-Gestures dataset was
created with input modalities identical to the ones de-
tected real-time on a mobile robot.
Besides using the same input modality as the one
available on the robot, the camera positions also plays
a role. While some social mobile robots have cam-
eras at heights closer to the eye-level of a person,
many mobile robots used today are logistics robots
with cameras close to the ground. In order to simulate
these differences, four cameras are placed as shown
on Figure 4, three RealSense D415 (field of view:
65°x 40°) at different angles close to the ground, and
one RealSense D455 (field of view: 87°x 58°), in the
head of a social robot. All cameras are calibrated
Figure 4: Recording setup. A display instructs the subject
which gesture to perform to the robot. This is recorded with
four different cameras.
Figure 5: Fields of view from the four cameras (action Get
attention).
and the calibration parameters are available with the
dataset. While recording the interactive classes, the
subjects direct their commands towards this robot.
The field of view of the cameras can be seen in Fig-
ure 5.
Using this setup, 17 adult subjects are recorded
performing the 20 actions. Each subject performs
the entire set of actions with a randomized order and
the process is repeated 10 times. This ensures that
the subject is unaware of the sequence of actions to
be performed and guaranteed diversity in orientation,
placement as well as performance of the actions. The
subjects are instructed to keep within a certain area in
order to ensure that they stay within the field of view
of all cameras. Figure 6 shows each action class being
performed by the subjects.
For each recording, the RGB and depth images
are saved. Afterwards, these are run through the pose
detection and tracking system, resulting in a separate
pose sequence for each camera, i.e., four for each rep-
etition. While the cameras record the same perfor-
mance, the different angles ensure that the extracted
pose sequences are not identical. The subjects are not
instructed in the nature of their gestures, only the mes-
sage they should convey. Through this, gesture varia-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
562
(a) Stop (b) Go right (c) Go left (d) Come here
(e) Follow me (f) Go away (g) Agree (h) Disagree
(i) Go there (j) Get attention (k) Be quiet (l) Don’t know
(m) Turn around (n) Take this (o) Pick up (p) Standing still
(q) Being seated (r) Walking towards (s) Walking away (t) Talk on the phone
Figure 6: Actions included in HRI-Gestures. (a) to (o) show the interactive classes, while (p) to (t) show the passive ones.
HRI-Gestures: Gesture Recognition for Human-Robot Interaction
563

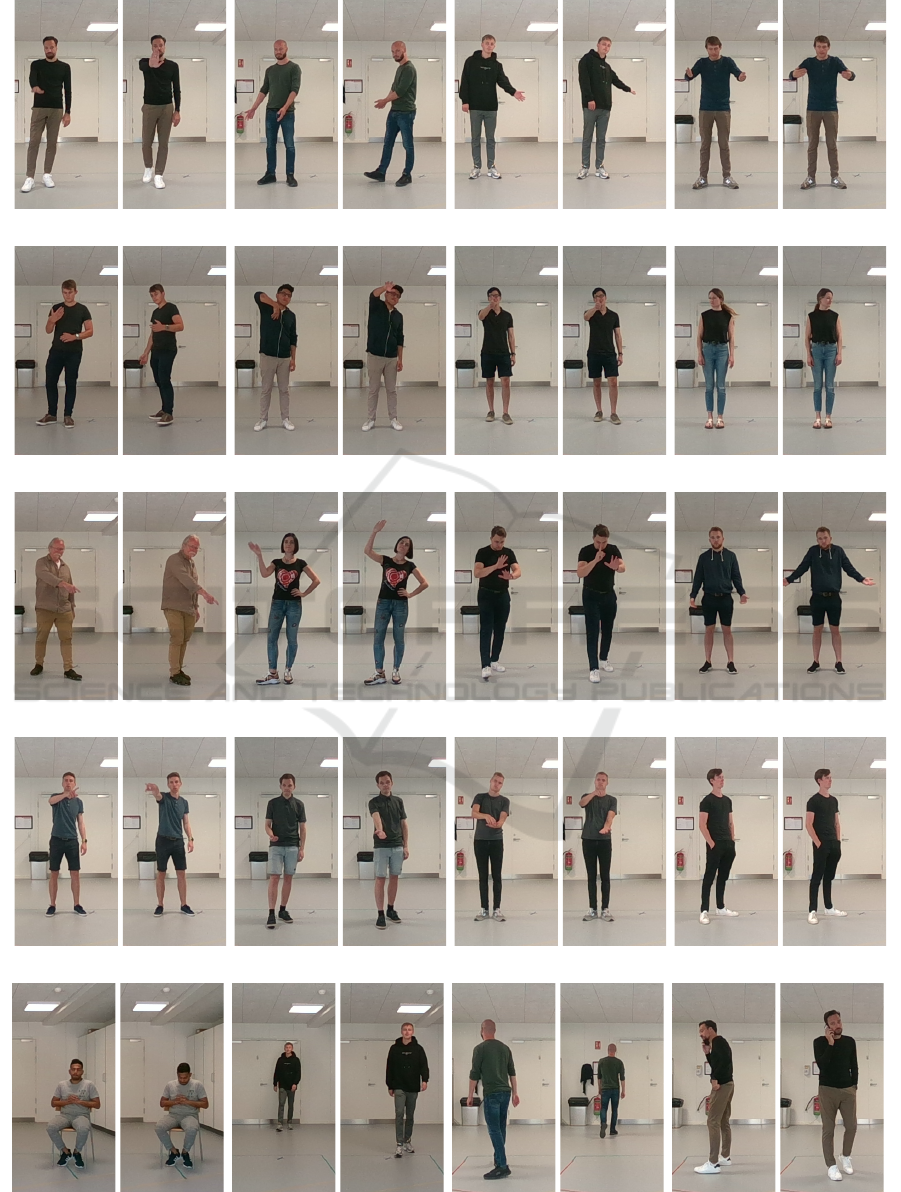
Figure 7: Difference in gesture performance (action Pick
Up) between subjects.
tions for each action class can be observed (Figure 7).
The dataset includes the joint position files as well
as the raw RGB and depth images. A drawing of
the recording setup including distances between cam-
eras and the recording along with camera calibration
files are available. The availability of the RGB and
depth images ensures that new post-processing meth-
ods, e.g. different human pose detection algorithms,
are possible in the future.
3.2 Gesture Learning
In order to obtain results on HRI-Gestures, RA-GCN
(Song et al., 2019) was trained on the dataset. This
model is especially suited for operation on a mobile
robot, as it is designed to handle occlusions which
commonly occur in robotics applications. This ro-
bustness to occlusions is due to the network’s multi-
stream design, as it is composed of several streams
of ST-GCN (Yan et al., 2018).The pose sequences
are first input to a ST-GCN stream and the activated
joints, i.e., those which contribute the most to the
output, are recorded. The activated joints are then
masked in the original sequence and become input
to a second ST-GCN stream in the 2-stream model.
This enables the model to learn rich features from all
joints and thus making it more robust to occlusions.
The network can also be set up with a third stream
which takes the similarly masked sequence of the sec-
ond stream as input, resulting in a 3-stream model.
The full HRI-Gestures dataset is used to train both
2-stream and 3-stream RA-GCN models using either
2D or 3D poses. The dataset is also split into subsets
containing only some of the classes, such as only the
interactive or the passive ones, or by merging all the
interactive classes and all the passive ones, creating a
binary classification problem.
Two splits are introduced for evaluation, Cross-
Subject (CS) and Cross-Repetition (CR). In CS, 14
subjects are used for training and 3 subjects are used
for evaluation. This evaluates the generalization of
the model to different individuals. In CR, repetitions
odd numbered repetitions of each subject is used for
training while even numbered repetitions are used for
Table 1: Cross-subject (CS) and cross-repetition (CR) ac-
curacy on full dataset using either 2 or 3 stream RA-GCN
model with 2D or 3D keypoints.
Model d CS CR
2s RA-GCN 2D 66.6% 82.3%
3s RA-GCN 2D 67.5% 83.3%
2s RA-GCN 3D 69.0% 83.8%
3s RA-GCN 3D 70.0% 84.9%
evaluation. This enables evaluation of generalization
on different instances of the same individual. CR is
also an indication of the results achievable in CS if
abundant data is available, as action performance vari-
ance will be covered.
4 RESULTS
In this section, results from training the RA-GCN net-
work on the collected dataset are presented. As men-
tioned before, RA-GCN is a multi stream model, al-
lowing subsequent streams to focus on joint locations
which were not in focus on previous streams. 2- and
3-stream models are trained on the CS and CR splits,
using either 2D or 3D joints as input modalities. The
resulting validation accuracies can be seen in Table 1.
The first thing to notice is that CR accuracy is con-
siderably higher than CS. This is because that even
though each subject did not perform the actions in the
same way through all repetitions, the relative variance
in the actions for the same subject is smaller than the
variance of the actions between subjects. This shows
that the trained models do not fully generalize to new
subjects, evident as well by the training accuracies
reaching above 99 % in most cases, which indicates
that the model overfits the data due to the large dif-
ference in training and validation accuracy. Since the
RA-GCN network was designed to operate on a much
larger dataset such as NTU, the need for a new recog-
nition model, adapted for a smaller-scale dataset be-
comes apparent. Alternatively, the problem could be
solved by collecting additional data.
When comparing 2D against the 3D counterparts,
3D delivers slightly better performance and as 3D is
also better suited for use in mobile robotic applica-
tions due to the aforementioned problem of egomo-
tion, all the following experiments are conducted us-
ing the 3D modality. The 3-stream models for both
modalities, achieve marginally better results than their
2-stream counterparts. However, since the 2-stream
model is computationally lighter than the 3-stream
model, it is better suited for mobile robotic applica-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
564

Figure 8: Confusion matrix of 2s RA-GCN with 3D key-
points on CS validation set. Black are interactive and gray
are passive classes.
tions and thus is chosen for all further experiments.
In order to further analyze the performance of the
model, a confusion matrix is constructed from the re-
sults of the 2-stream 3D model trained on the CS split
(Figure 8). The confusion matrix shows how many
validation examples of each class, which were clas-
sified as which classes. Each row corresponds to ex-
amples from a specific class, which are classified as
corresponding to the column. A correctly classified
example is counted in the diagonal, and thus most ex-
amples should lie here if the network performs well.
The passive classes perform well, as can be seen from
the lighter colors attributed to the lower end of the di-
agonal. Go there or Turn around on the other hand are
troublesome as they are classified wrongly more often
than not. This can be due to the action reenactment by
the subjects, where both classes were performed with
pointing a finger towards a direction, which could also
be seen in other classes, e.g. Go right, Take this.
In most applications, robots operate within a cer-
tain context which limits the amount of relevant ac-
tions and gestures. Several cases were selected, e.g.,
recognizing whether a person is attempting to inter-
act with the robot or not, and separate networks were
trained for those contexts by dividing the dataset in
subsets. Two subsets were created using the interac-
tive and passive classes separately. Independent net-
works are trained on the subsets. The results can be
seen on Table 2 with the equivalent subset name. The
performance on CR is, as expected, better and it is
also clear that passive classes are more easily recog-
nized than interactive ones. This means that a net-
work trained on the ”passive” subset could be used in
scenarios where a robot is navigating in a human oc-
Table 2: Subsets of classes used to partition the dataset and
train individual models.
Subset CS CR
Interactive 65.3% 81.0%
Passive 93.6% 97.1%
Binary 95.9% 98.2%
Go 68.1% 84.1%
Agreement 49.6% 52.7%
cupied environment with no intention of interaction.
A ”binary” subset was created by merging the in-
teractive classes into one class and the passive classes
into another. The binary subset shows whether the
subject is attempting to interact or not with the robot
and could be used in such a use case in mobile robots,
to clarify human’s intentions towards the robot.
”Go” describes all classes with the intention of in-
dicating a direction or goal to the robot (Go there, Go
right, Go Left, Go away). The subset shows consid-
erably better results than the individual actions in the
original model but still similar to the overall CS accu-
racy of the entire dataset, which is inadequate.
”Agreement” includes only the Agree and Dis-
agree classes, evaluating the distinction between the
two. In contrast with the rest, this subset learning is
poor. As it was observed during recordings a popular
depiction of the actions consisted of thumbs up and
thumbs down gestures, and since the skeleton joints
used, do not include the thumbs or fingers, these could
not be learned. This shows that the selected joint
skeleton is not suitable at this point for these classes.
5 CONCLUSIONS
In this paper, the problem of gesture recognition for
human-robot interaction is addressed and analyzed.
Gestures are a crucial component of communication
in human-robot interaction, and thus it is something
which robots should be able to detect in order to im-
prove their HRI capabilities.
In order to solve the problem of gesture recog-
nition, it was identified that a proper public ges-
ture dataset is missing. This paper has presented a
methodology for creating such a dataset which can be
used for training algorithms usable on mobile robots
in unconstrained environments.
The methodology has then been used to create the
HRI-Gestures dataset. Subsets of the dataset can be
used for gesture recognition in various HRI contexts,
e.g., by training a network to distinguish between in-
HRI-Gestures: Gesture Recognition for Human-Robot Interaction
565

teractive and passive classes (reaching 95.9%) in or-
der to determine whether someone is trying to interact
with the robot or not.
The results show that, with our approach, gesture
recognition with high classification rates is possible
for important subtasks in HRI. On the full classifica-
tion issue of 20 classes, our method achieves 70%.
A different joint constellation could improve results
on classes that rely on finger joints, which are not in-
cluded in the dataset.
Further enhancement of gesture recognition is
possible. Extending the dataset or creating algo-
rithms which achieve higher accuracy on the full HRI-
Gestures dataset could be considered.
ACKNOWLEDGEMENTS
This research was supported by the HanDiRob
project, funded by the European Fund for regional
development, and by the DIREC project, funded by
Innovation Fund Denmark.
REFERENCES
Bodenhagen, L., Suvei, S.-D., Juel, W. K., Brander, E.,
and Kr
¨
uger, N. (2019). Robot technology for future
welfare: meeting upcoming societal challenges – an
outlook with offset in the development in scandinavia.
Health and Technology, 9:197–218.
Cao, Z., Hidalgo Martinez, G., Simon, T., Wei, S., and
Sheikh, Y. A. (2019). Openpose: Realtime multi-
person 2d pose estimation using part affinity fields.
IEEE Transactions on Pattern Analysis and Machine
Intelligence.
Chatterjee, S., Zunjani, F. H., and Nandi, G. C. (2020).
Real-time object detection and recognition on low-
compute humanoid robots using deep learning. In
2020 6th International Conference on Control, Au-
tomation and Robotics (ICCAR), pages 202–208.
Hull, R. (2016). The art of nonverbal communication in
practice. The Hearing Journal.
Juel., W., Haarslev., F., Kr
¨
uger., N., and Bodenhagen., L.
(2020). An integrated object detection and tracking
framework for mobile robots. In Proceedings of the
17th International Conference on Informatics in Con-
trol, Automation and Robotics (ICINCO).
Kay, W., Carreira, J., Simonyan, K., Zhang, B., Hillier, C.,
Vijayanarasimhan, S., Viola, F., Green, T., Back, T.,
Natsev, A., Suleyman, M., and Zisserman, A. (2017).
The kinetics human action video dataset. ArXiv,
abs/1705.06950.
Kr
¨
uger, N., Fischer, K., Manoonpong, P., Palinko, O., Bo-
denhagen, L., Baumann, T., Kjærum, J., Rano, I.,
Naik, L., Juel, W., Haarslev, F., Ignasov, J., Marchetti,
E., Langedijk, R., Kollakidou, A., Camillus Jeppesen,
K., Heidtmann, C., and Dalgaard, L. (2021). The
smooth-robot: A modular, interactive service robot.
Frontiers in Robotics and AI, 8.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Fleet,
D., Pajdla, T., Schiele, B., and Tuytelaars, T., editors,
Computer Vision – ECCV 2014, pages 740–755.
Liu, H., Tu, J., and Liu, M. (2017). Two-stream 3d convolu-
tional neural network for skeleton-based action recog-
nition. ArXiv, abs/1904.07850.
Liu, J., Shahroudy, A., Perez, M., Wang, G., Duan, L.-Y.,
and Kot, A. C. (2020a). Ntu rgb+d 120: A large-
scale benchmark for 3d human activity understanding.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 42(10):2684–2701.
Liu, Z., Zhang, H., Chen, Z., Wang, Z., and Ouyang, W.
(2020b). Disentangling and unifying graph convo-
lutions for skeleton-based action recognition. 2020
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 140–149.
McNally, W. J., Vats, K., Wong, A., and McPhee, J.
(2020). Evopose2d: Pushing the boundaries of 2d
human pose estimation using neuroevolution. ArXiv,
abs/2011.08446.
Palinko, O., Ram
´
ırez, E., Juel, W., Kr
¨
uger, N., and Bo-
denhagen, L. (2020). Intention indication for human
aware robot navigation. In Proceedings of the 15th
International Joint Conference on Computer Vision,
Imaging and Computer Graphics Theory and Appli-
cations - Volume 2: HUCAPP.
Song, Y.-F., Zhang, Z., Shan, C., and Wang, L. (2020).
Stronger, faster and more explainable: A graph con-
volutional baseline for skeleton-based action recogni-
tion. In Proceedings of the 28th ACM International
Conference on Multimedia (ACMMM).
Song, Y.-F., Zhang, Z., Shan, C., and Wang, L. (2021).
Richly activated graph convolutional network for ro-
bust skeleton-based action recognition. IEEE Trans-
actions on Circuits and Systems for Video Technology,
31(5):1915–1925.
Song, Y.-F., Zhang, Z., and Wang, L. (2019). Richly acti-
vated graph convolutional network for action recogni-
tion with incomplete skeletons. In International Con-
ference on Image Processing (ICIP). IEEE.
Tada, Y., Hagiwara, Y., Tanaka, H., and Taniguchi, T.
(2020). Robust understanding of robot-directed
speech commands using sequence to sequence with
noise injection. Frontiers in Robotics and AI, 6:144.
Thakkar, K. C. and Narayanan, P. (2018). Part-based graph
convolutional network for action recognition. ArXiv,
abs/1809.04983.
Yan, S., Xiong, Y., and Lin, D. (2018). Spatial temporal
graph convolutional networks for skeleton-based ac-
tion recognition. ArXiv, abs/1801.07455.
Zhou, X., Wang, D., and Kr
¨
ahenb
¨
uhl, P. (2019). Objects as
points. ArXiv, abs/1904.07850.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
566
