
DeTracker: A Joint Detection and Tracking Framework
Juan Diego Gonzales Zuniga, Ujjwal and Franc¸ois Bremond
INRIA Sophia Antipolis, 2004 Route des Lucioles, BP93 Sophia Antipolis Cedex, 06902, France
Keywords:
Multiple Object Tracking, Joint Tracking and Detection, Graph Neural Networks.
Abstract:
We propose a unified network for simultaneous detection and tracking. Instead of basing the tracking frame-
work on object detections, we focus our work directly on tracklet detection whilst obtaining object detection.
We take advantage of the spatio-temporal information and features from 3D CNN networks and output a series
of bounding boxes and their corresponding identifiers with the use of Graph Convolution Neural Networks.
We put forward our approach in contrast to traditional tracking-by-detection methods, the major advantages
of our formulation are the creation of more reliable tracklets, the enforcement of the temporal consistency,
and the absence of data association mechanism for a given set of frames. We introduce DeTracker, a truly
joint detection and tracking network. We enforce an intra-batch temporal consistency of features by enforcing
a triplet loss over our tracklets, guiding the features of tracklets with different identities separately clustered
in the feature space. Our approach is demonstrated on two different datasets, including natural images and
synthetic images, and we obtain 58.7% on MOT and 56.79% on a subset of the JTA-dataset.
1 INTRODUCTION
Object detection and “multi-object tracking” (MOT)
are highly coupled tasks. In order to detect a set of tar-
gets, one must detect them and follow them through a
set of video frames. Conversely, if a set of targets are
tracked, it must be possible to localize them across the
frames. This complementary nature of the two tasks
suggests that it should be possible to train them jointly
and obtain bounding boxes and tracklets as part of the
same end-to-end pipeline. However in the predomi-
nant paradigm of “tracking-by-detection” (TBD), de-
tection and tracking are trained separately and thus
fail to complement each other’s learning. In TBD,
post-processed bounding boxes from a pre-trained de-
tector serve as inputs to a tracker. Incorrect detection
outputs therefore serve as noisy inputs and lead to in-
correct tracklet generation. This is especially press-
ing in videos with crowded and occluding scenarios
which are still significant challenges to existing detec-
tors. Lastly, traditional TBD does not have the in-built
mechanism of enforcing temporal consistency across
detections, and the manner it has been attempted is by
extracting features of detections in order to compute
similarity measures between tracklets. This is still
done with Siamese/re-id networks (Bergmann et al.,
2019) which are trained with large datasets before-
hand and handle appearance and geometric similari-
ties but not temporal information, thereby undermin-
ing the temporal consistency of tracklets.
In order to improve MOT performance, we in-
vestigate both joint detection, tracking and data as-
sociation components. There are some works (Kim
and Kim, 2016; Bergmann et al., 2019; Feichten-
hofer et al., 2017; Voigtlaender et al., 2019; Wang
et al., 2019; Xu and Wang, 2019; Sun et al., 2020;
Wang et al., 2020; Pang et al., 2020) which attempt
to address joint-detection-and-tracking (JDT). (Kim
and Kim, 2016; Bergmann et al., 2019; Feichtenhofer
et al., 2017; Wang et al., 2020) propose to unify ob-
ject detector with a model-free single-object tracker.
The tracker first uses 2D CNNs to extract appearance
features from the detection in the previous frame and
from the image in the current frame. Based on these
appearance features, the tracker regresses the location
of the detected object to the current frame. As each
object is tracked independently, the data association
problem is naturally resolved. (Voigtlaender et al.,
2019; Wang et al., 2019; Xu and Wang, 2019) pro-
pose to extend the object detector by adding a Re-
ID branch, which employs CNNs to extract embed-
dings for positive and negative samples learned with
the triplet loss. At test time, the embedding obtained
from the Re-ID branch can serve as a similarity mea-
surement used by the Hungarian algorithm for data
association. However, these methods are limited to
526
Zuniga, J., Ujjwal, . and Bremond, F.
DeTracker: A Joint Detection and Tracking Framework.
DOI: 10.5220/0010875700003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
526-536
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

frame-wise detections. Consequently, they only allow
frame-by-frame association, requiring manual adjust-
ment of temporal stride. (Sun et al., 2020; Pang et al.,
2020) propose a tubelet approach based on multiple
input frames based on 3D CNNs as feature extractors
but only consider a shallow temporal association pro-
portioned by their respective backbones.
We advocate two important lines of improvements
towards better MOT performance –
1. Object interaction within a single frame (spatial)
and across multiple frames(spatio-temporal) can
be beneficial for object localization and associ-
ation. We point this argument because existing
methods extract features by CNNs for each object
at each frame and they are independent both from
the same object in other frames and from other
objects in any frame.
2. 3D CNN approaches have shown to be an im-
provement for multiple frame detection and bene-
fit greatly from Graph Convolution Neural Net-
works as it was shown in with their 2DCNNs
counterpart (Wang et al., 2020).
Our technique is different, as it directly computes
tracklets over multiple frames by modeling their as-
sociation, combining the strength of 3D CNNs and
GCNNs. We postulate that an end-to-end trainable
pipeline where detection and tracking complement
each other during the training phase can bolster both
detection and MOT. Our proposed method called De-
Tracker conducts joint detection of bounding boxes
and tracklets while being end-to-end trainable. De-
Tracker focuses on 4 principle aspects – a) Detec-
tion of object bounding boxes, b) generating track-
lets for each detected bounding box, c) ensuring tem-
poral consistency i.e. ensuring high intra-class dis-
criminability to discern between tracklets with differ-
ent identities and simultaneously maintaining low dis-
criminability for tracklets for the same identity com-
puted in different batches of frames and, d) ensuring
end-to-end training for the whole pipeline.
Our experiments and analysis confirm that De-
Tracker achieves comparable state-of-art perfor-
mance on MOT. We achieve of 58.7% on the MOT17
dataset and 56.79% on a subset of the JTA dataset.
2 RELATED WORK
Tracking-by-Detection based Model. Research
based on the TBD framework often adopts detec-
tion results given by external object detectors and fo-
cuses on the tracking part to associate the detection
boxes across frames. Many association methods have
been utilized on tracking models. In (Berclaz et al.,
2011; Li Zhang et al., 2008; Lenz et al., 2014; Pir-
siavash et al., 2011; Jiang et al., 2007), every de-
tected bounding-box is treated as a node of graph,
the associating task is equivalent to determining the
edges where maximum flow (Berclaz et al., 2011; Xiu
et al., 2018), or equivalently, minimum cost (Jiang
et al., 2007; Pirsiavash et al., 2011; Li Zhang et al.,
2008), are usually adopted as the principles. Re-
cently, appearance-based matching algorithms have
been proposed (Kim et al., 2015; Fang et al., 2018;
Sadeghian et al., 2017). By matching targets with
similar appearances such as clothes and body types,
models can associate them over long temporal dis-
tances. Re-ID techniques (Kuo and Nevatia, 2011;
Bergmann et al., 2019; Tang et al., 2017) are usu-
ally employed as an auxiliary in this matching frame-
work. However, these methods are limited to frame-
wise detections. Consequently, it only allows frame-
by-frame association, requiring manual adjustment
of temporal stride. Our technique is different, as it
directly computes tracklets over multiple frames by
linking prediction, enabling realtime solutions while
considering all the frames.
3D CNNS for Multi-Object Tracking. Performance
of image-based object detectors are limited when fac-
ing dense crowds and serious occlusions. Thus, some
works utilize extra information as motion (Pang et al.,
2020) or temporal features learned by the tracking
step to aid detection. Both (Kang et al., 2017) and
(Kang et al., 2016) generate multi-frame bounding
box tubelet proposals and extract detection scores and
features with a CNN and LSTM, respectively. (Pang
et al., 2020; Mahadevan et al., 2020) make a case for
3D CNNs for Multi-object tracking and Object Seg-
mentation, both tasks primarily done frame-by-frame.
(Pang et al., 2020) is the most similar approach to our
method, they predict bounding tubes (Btubes) across
3 different frames. Their prediction model consists
of 15 degrees of freedom coordinates across 3 frames
and 3 additional values for temporal locations. This
allows the target to change its direction once for each
prediction. Although (Pang et al., 2020) proposes the
concept of Btubes, it does not enforce any temporal
constraints and instead bases its tracklet association
on different hyper-parameters such as IOU threshold
depending on video frame rate and frame overlapping
to compensate the aforementioned absence of tempo-
ral consistency.
Point-precise Tracking of Multiple Objects. Al-
though some works extend MOT with pixel-precise
masks (Milan et al., 2015; Osep et al., 2018), a
much larger set of works can be found in the domain
of Video Object Segmentation(VOS), which encom-
DeTracker: A Joint Detection and Tracking Framework
527

passes multiple tasks related to pixel-precise tracking.
We tackle the task of MOT in videos by modeling the
video clip as a 3D spatio-temporal volume and us-
ing a network to track object as points. This network
is trained to push points belonging to different object
instances towards different, non-overlapping clusters
in the embedding space. This differs from most exist-
ing approaches, which first generate object detections
per-frame, and the associate them over time.
Graph Convolution Neural Networks. GCNNs
were first introduced by (Gori et al., 2005) to pro-
cess data with a graph structure directly with neu-
ral networks. The key idea of GNNs is to define a
computational graph with nodes and edges relating
each other, and to update the node and edge features
based on the node-node, node-edge, and edge-edge
interactions, i.e., a process that is called feature ag-
gregation. Each with a unique feature aggregation
rule, different versions of GCNNs (.e.g, GraphConv,
GCN, GAT) were proposed and have shown to be ef-
fective. Specifically, in computer vision, we have seen
significant improvement using GCNNs in many sub-
fields such as point cloud classification, single object
tracking, and semantic segmentation. Despite that
advances have been achieved with GCNNs in many
fields, then is no published work leveraging GCNNs
to model object interactions in object detection and
data association for MOT. To the best of our knowl-
edge, our work is the first introducing GCNNs and
3DCNNs to tackle joint detection and tracking. The
following sections explain our problem formulation,
the network architecture and the loss functions em-
ployed, and the inference process.
3 PROBLEM FORMULATION
Let us consider a minibatch B consisting of N frames
of a video V . Let there be M unique identities in
B. We want to detect a set of K , {k
i
}
M −1
i=0
tracklets
where k
i
, {b
j
i
}
N−1
j=0
is described by a set of N bound-
ing boxes. b
j
i
is the bounding box of i
th
identity in
the j
th
frame. A bounding box is given by a vector of
tuples of the form [(x
tl
, y
tl
), (x
br
, y
br
)] where tl and br
respectively abbreviate the top-left and bottom-right
corners of a bounding box. If an identity i does not ex-
ist in frame j then we indicate that b
j
i
= [(0, 0), (0, 0)]
without any loss of generality.
Since a video with large number of frames can-
not be processed all at once, we need to link tracklets
obtained from different minibatches of V . This calls
for features corresponding to different tracklets in a
minibatch to be far apart. Therefore, we wish to learn
a feature transformation f (.) of a tracklet such that,
|| f (k
i
) − f (k
j
)||
2
,
(
≤ ε i = j
≥
1
ε
i 6= j
(1)
where ε is an infinitesimally small number. The above
formulation of temporal consistency within a mini-
batch simply denotes that features of same identity
should be close while being far apart for different
identities. As we will see, the above formulation is
well built into DeTracker while supporting end-to-end
training.
4 DETRACKER
DeTracker consists of 3 main components – a) 3D
backbone, b) detection head and c) tracking head.
The overview of our approach is shown in figure
1. The 3D backbone processes a tensor of shape
B × 3 × N × H ×W of sequential video frames. The
resulting feature maps from multiple layers of the
backbone are reshaped into a 4D tensor of batch size
BN which are fed to a FCOS (Tian et al., 2019) detec-
tor in the FPN (Lin et al., 2017) scheme. The detected
bounding boxes are feature pooled using ROI-align
(He et al., 2017) and operated upon by a graph atten-
tion network (GAT) to produce the final tracklets for
the minibatch B.
4.1 3D Backbone
We use a 3D backbone for initial feature extrac-
tion from a batch B of N video frames. As against
2D backbones used in many previous works (Zhu
et al., 2018), a 3D backbone harnesses spatial as
well as temporal characteristics of a video and selec-
tively attends to moving entities (Carreira and Zisser-
man, 2017). We utilize R(2+1)D (Tran et al., 2018)
pretrained on Kinetics-400 (Carreira and Zisserman,
2017) for initial feature extraction. In 3D backbones,
temporal pooling leads to reduction in the number
of output frames compared to the number of input
frames. This is detrimental to our objective which is
to detect and track people in each video frame of B.
Therefore, we remove all temporal pooling layers to
have same number of input and output frames. Spatial
pooling in 2D and 3D backbones squeezes the spatial
dimensions of a feature map vis-
`
a-vis the input. This
leads to lack of feature details from small-scale ob-
jects. For a backbone with an output spatial stride
of s, any object with spatial dimensions smaller than
s × s reduces to sub-pixel scale in the output feature
map and is therefore difficult to detect. To facilitate
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
528
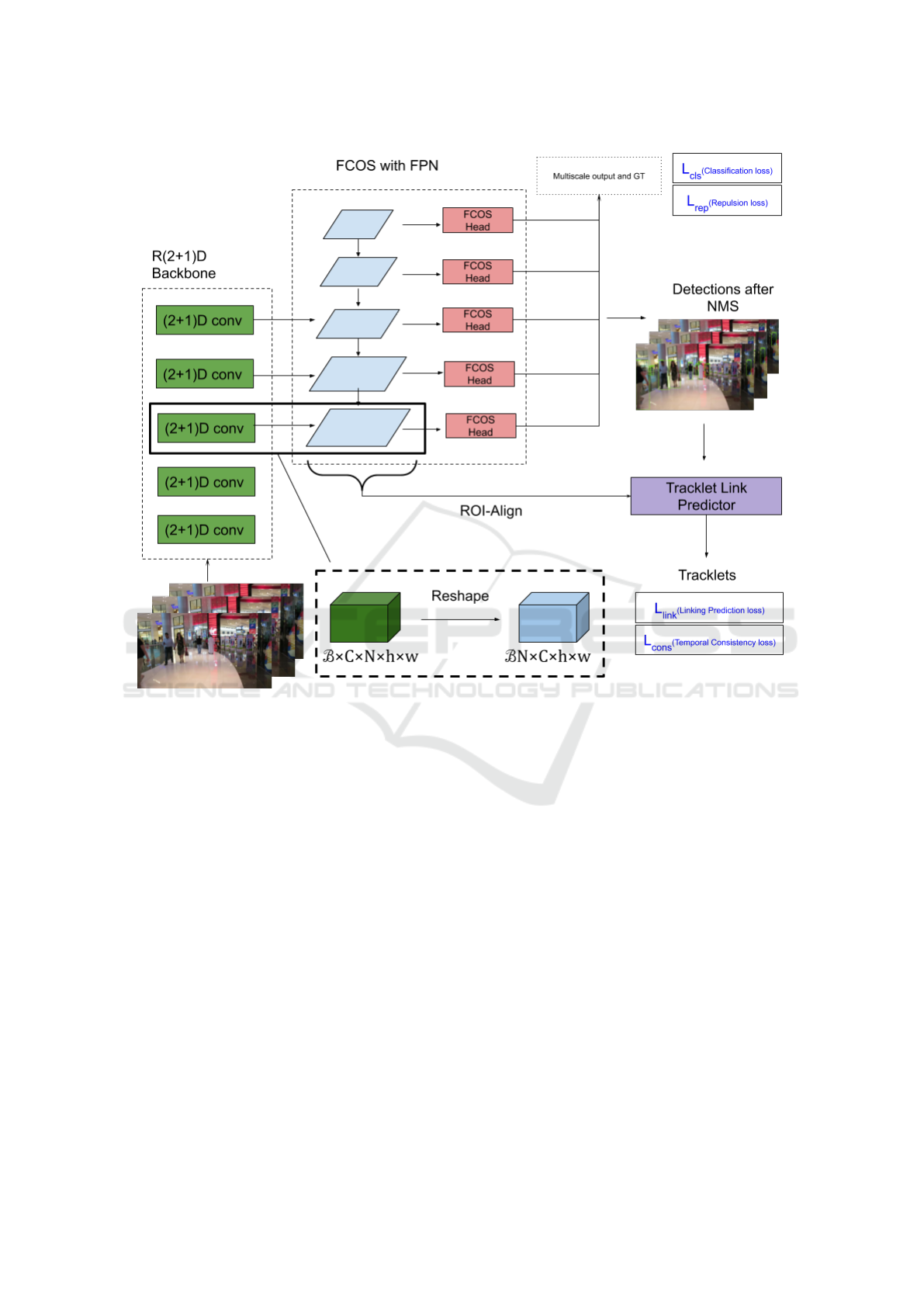
Figure 1: Overview of the proposed approach. A 3D backbone preprocesses a set of videos. The preprocessed feature maps
are reshaped into a batch of 3D feature maps which are then fed to a FCOS detector (Tian et al., 2019) implemented in FPN
paradigm. The bounding boxes obtained after NMS are pooled using ROI-align (He et al., 2017) and are fed to the Tracklet
Link Predictor.
processing under limited computational constraints, s
is usually set to a high number in 3D backbones such
as 14 in R(2+1)D (Tran et al., 2018) and therefore
is unsuitable for detecting any pedestrian less than
14 pixels in height. Existing work on dilated resid-
ual networks (Yu et al., 2017) shows that reduction
in s leads to higher resolution feature maps capable
of producing better classification and segmentation
performance. We therefore set the output stride of
R(2+1)D to 4, thereby making it theoretically possi-
ble to detect even very small-scale pedestrians. The
feature maps from the backbone are fed to the detec-
tion head which is next described.
4.2 Detection Head
Video object detection techniques aim at harnessing
video-specific characteristics of objects such as opti-
cal flow (Zhu et al., 2017), temporal context (Beery
et al., 2020) and visual memory over time (Beery
et al., 2020; Liu et al., 2019). Harnessing these char-
acteristics aids in improved performance vis-
`
a-vis
per-frame detection using 2D backbones. Harness-
ing the aforementioned characteristics often comes at
the price of high parameter count and complex ar-
chitecture which precludes their efficient usage with
a tracking module. For instance, the state-of-art CR-
CNN (Beery et al., 2020) model makes use of 2 sets of
memory banks along with a per-frame FRCNN (Ren
et al., 2015) and multiple self-attention modules. This
makes the resulting model large thereby making it dif-
ficult to use it in a longer pipeline involving object
tracking. In our work we rather adopt a middle path
of using a static image based object detector utilizing
a 3D backbone for per-frame detection.
To this end, the output feature map from the
R(2+1)D backbone is reshaped to coalesce the batch
and frame dimensions to obtain a 3D feature map
with a batch size of N × B (figure 1). Prior use of
3D backbone ensures that the feature maps fed to the
DeTracker: A Joint Detection and Tracking Framework
529

detector entail both spatial and temporal characteris-
tics. We utilize FCOS (Tian et al., 2019) as our de-
tector. FCOS is an anchor-free detector which pre-
dicts bounding boxes at every location in a feature
map. The use of a center loss ensures a low propor-
tion of false positives by assigning bounding boxes far
from potential ground truth center, a very low con-
fidence. Our approach is indifferent to the specific
choice of a detector and FCOS is chosen for its sim-
plicity, high performance and relative robustness to
occlusion (Tian et al., 2019). We utilize FCOS within
a FPN (Lin et al., 2017) paradigm to obtain better
detection response for pedestrians across scales. To
further minimize false positives and to avoid multiple
duplicate detections we substitute the repulsion loss
(Wang et al., 2018) in place of the standard smooth-
L1 loss usually used with FCOS.
During training, the detection head is trained us-
ing the standard FCOS loss function,
L
det
,
1
N
pos
(
∑
a,b
L
cls
(c
a,b
, c
∗
a,b
) + 1
c
∗
a,b
>0
L
rep
(t
a,b
,t
∗
a,b
))
(2)
where (a, b) index feature map locations, L
cls
is the
focal loss, L
rep
is the repulsion loss, c
a,b
is the clas-
sification probability at a location while t
a,b
is the re-
gression target prediction at a location. The starred
(∗) variables denote the corresponding targets. 1
c
∗
a,b
denotes an indicator function which is 1 for locations
where an object of interest i.e pedestrian is present
else is 0.
The bounding boxes detected by FCOS after post-
processing with NMS are used for discovering track-
lets as described in the next section.
4.3 Tracklet Link Prediction
To formalize this linkage operation let us consider that
given a bounding box b
i
of identity i, F (b) denotes
the frame to which it belongs. Let B denote the set of
all bounding boxes obtained across all N frames. The
objective of the linkage operation then is to compute
a mapping R : B × B −→ [0, 1] such that,
R (b
x
, b
y
) =
0 x 6= y
0 F (b
x
) = F (b
y
)
p ∈ (0, 1] otherwise
(3)
The third case in equation 3 states that given two
bounding boxes which have the same identity and are
in two different frames, the mapping R (., .) assigns a
non-zero probability p indicating that they are likely
to represent the same individual. During training tar-
get assignment for the computation of the loss func-
tion, p = 1. During testing, p is predicted by a link
prediction approach we describe next.
The tracklet link prediction in our work is done
using graph convolutional networks (GCNN). This is
motivated by two important observations. Firstly, the
collection of bounding boxes from a detector is an un-
ordered set and hence cannot be unambiguously ar-
ranged on a regular grid. GCNNs are a natural and
popular choice for handling data with an unordered
structure (Henaff et al., 2015). Secondly, local con-
text plays an important role in identification tasks
such as person re-identification (Li et al., 2019; Faren-
zena et al., 2010) and tracking.
The nodes V in our graph G(V, E) correspond to
each bounding box obtained from FCOS. The node
features are obtained by performing ROI alignment
(He et al., 2017). The adjacency matrix A for G is de-
fined such that nodes belonging to the same frame are
not connected to each other. This reflects the natural
assumption that a person can occur only once in each
frame. On the other hand, all nodes belonging to dif-
ferent frames are connected as a priori information is
not available about linkage. However, during training
we perform target assignment for the edge weights of
the graph as per equation 3, where we set p = 1.0.
Our tracklet link prediction is based on graph
attention networks (GAT) (Veli
ˇ
ckovi
´
c et al., 2017).
GATs are an improvement over traditional GCNNs
(Kipf and Welling, 2016) by incorporating self-
attention mechanism. Self-attention mechanisms al-
low nodes to attend to features of other nodes. The
latent representations for nodes thereby produced are
influenced by neighborhood nodes which are highly
related to them. This is particularly useful for in-
ductive learning tasks such as link prediction where
latent representations based on pairwise relationship
are particularly desirable.
We process G with 2 GAT layers, each with 4
attention heads. The feature vectors representing an
edge in the output graph are computed using their in-
ner product of the nodes it connects. The edge fea-
ture vectors are then processed with 2 fully-connected
layers followed by sigmoid activation to obtain the
probability value expressing the likelihood of an edge
existing between two nodes. Let (q, r) represent the
edge connecting nodes q and r in the graph G. During
training the link prediction is trained using the stan-
dard logistic regression function as follows,
L
link
, −
1
|E|
∑
(i, j)∈E
y
∗
i, j
logy
i, j
+ (1 − y
∗
i, j
)log(1 − y
i, j
)
(4)
As in equation 2, here the starred terms represent the
groundtruth values while y
i, j
represents the predicted
probability of the edge between nodes i and j.
During inference, once the links are predicted, a
threshold τ is applied and all consecutive temporal
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
530

Figure 2: Tracklet link prediction in our work using Graph ATtention networks (GAT) (Veli
ˇ
ckovi
´
c et al., 2017). In this figure
the case of 3 video frames and B is shown. Different node colors indicate no connectivity between then while those of different
colors are connected according to equation 3.
nodes linked together by edges in G are taken as a
tracklet. In this way, the final tracklets along with the
corresponding bounding boxes are determined in our
approach. Although NMS applied after bounding box
detection in FCOS is a non-differentiable operation
unlike ROI-align (He et al., 2017). Since, node em-
beddings in G are obtained using ROI-align, the train-
ing is still end-to-end. As was outlined in section 3,
ensuring tracklet features corresponding to different
identities to be far apart is necessary to ensure good
tracklet linkage.
4.4 Temporal Consistency
We enforce temporal consistency described in equa-
tion 1 to separate the features learnt for different iden-
tities. Following the notations in section 3, let k
i
be
a tracklet denoting identity i. We define the feature
F(k
i
) representing this tracklet as the mean of ROI-
align features E(.) for all bounding boxes within k
i
,
F(k
i
) , µ(E(b)),b ∈ k
i
(5)
We enforce the constraints of equation 1 using triplet
loss (Dong and Shen, 2018) terms. Given n track-
lets, the triplet loss term can be computed for each
of C(n, 2) possible pairs of tracklets, such that one
is used for extracting the anchor and positive sample
pair, and the other is used for the negative sample.
However, C(n, 2) blows up rapidly for large values of
n with the triplet loss terms thereby dominating the
linkage and detection loss terms. We therefore, sam-
ple T , min(t,C(n, 2)) tracklet pairs randomly, where
t is a hyper-parameter. For MOT17 (Leal-Taix
´
e et al.,
2015), we found t = 20 as an appropriate value.
Let (k
i
, k
j
) be one of the T tracklet pairs. We use
k
i
for extracting the anchor and positive terms of the
triplet loss. k
j
is used for extracting the negative terms
of the triplet loss. The anchor term is taken as F(k
i
)
and the negative term is the embedding of one ran-
domly chosen bounding box from k
i
. F(k
j
) is the
negative term. During training over multiple epochs,
many possible combinations of anchor, positive and
negative terms are thereby used for triplet calculation
thereby mitigating the approximation invoked by the
random sampling of T and random choice of samples
for triplet calculation. The temporal consistency loss
in our work can be written as,
L
consistent
,
T −1
∑
u=0
L
u
triplet
(6)
where L
u
triplet
is the triplet loss term computed for the
u
th
pair.
We process a complete video in batches to ob-
tain tracklets and then use the features representing
a tracklet as defined in equation 5 to link the tracklets
together using GMMCP (Dehghan et al., 2015).
5 TRAINING
The total loss function for our approach is written as
L
tot
, L
det
+ L
link
+ L
consistent
+ L
regularization
(7)
where L
regularization
is the L2 regularization losses
from the complete architecture. Our implementation
is done in PyTorch (Paszke et al., 2017) and our exper-
iments are performed on 2 NVidia V100 GPUs. Dur-
ing training, we perform data augmentation using hor-
izontl flipping, brightness and contrast variations – all
done randomly. We utilize stochastic gradient descent
(SGD) for training with an initial learning rate (lr) of
DeTracker: A Joint Detection and Tracking Framework
531
Table 1: Tracking results on MOT17: The symbol ↑ indicates higher values are better, and ↓ implies lower values are favored.
Bold entries indicates best results.
Method Detr MOTA↑ IDF↑ MT↑ ML↓ FP↓ FN↓ IDS↓
SCNet Priv 60.0 54.4 34.4 16.2 72230 145851 7611
LSST(Feng et al., 2019) Pub 54.7 62.3 20.4 40.1 26091 228434 1243
Tracktor(Bergmann et al., 2019) Pub 53.5 52.3 19.5 36.3 12201 248047 2072
Tracktor++V2(Bergmann et al., 2019) Pub 56.3 55.1 21.1 36.3 8866 235,449 1987
JBNOT(Henschel et al., 2019) Pub 52.6 50.8 19.7 25.8 31572 232659 3050
FAMNet(Chu and Ling, 2019) Pub 52.0 48.7 19.1 33.4 14138 253616 3072
TubeTK(Pang et al., 2020) w/o 63.0 58.6 31.2 19.9 27060 177483 4137
JDMOT(Wang et al., 2020) w/o 56.4 42.0 16.7 40.8 17421 223974 4572
Ours w/o 58.7 56.9 28.7 20.2 38556 189612 4830
0.005 for first 10K iterations following which lr is re-
duced to 0.0005. The lr is then decayed by 5 times
after every 50K iterations until the loss value is sta-
blized. For NMS we use a threshold of 0.6 while for
thresholding the tracklets (sec. 4.3), we set τ = 0.5.
6 EXPERIMENTS
We demonstrate the tracking performance of our pro-
posed DeTracker on 2 datasets focusing on pedestrian
tracking. We use a subset of the JTA (Fabbri et al.,
2018) dataset, which we call as the small-JTA in ad-
dition to the MOT17(Milan et al., 2016) dataset as
described in the following.
Table 2: Comparison of detection results on MOT17Det
challenge.
Method AP
JDMOT (Wang et al., 2020) 0.81
Tracktor (Bergmann et al., 2019) 0.72
Ours 72
6.1 Datasets
Multi Object Tracking Challenge-17 (MOT17).
The multi-object tracking challenge (MOT17) bench-
mark (Leal-Taix
´
e et al., 2015; Milan et al., 2016) con-
tains a set of challenging videos with varying points
of view, different object sizes, motion and frame rate.
14 videos in total, 7 for training and 7 for testing. For
tracking, MOT Challenges have two separate tracks
in the leader board: public and private. Methods in
the public track use public detections provided by the
challenges while methods in the private track can use
their own detections. As our method performs joint
detection and data association, we compare against
state-of-art published methods from both public and
private tracks.
Joint-Track-Auto (JTA) Dataset. While good for
comparing the performance of a model against the lit-
erature, the MOT17 dataset is not very appropriate for
an ablation study: it does not contain any validation
videos and has only 7 training videos, which are too
few to further split into train and val. Furthermore, the
number of submissions to the MOT17 leaderboard is
limited to 4. Hence we carry out our ablation studies
on a synthetic dataset: Joint Track Auto (JTA) (Fab-
bri et al., 2018). JTA is a dataset annotated for hu-
man pose estimation and tracking and its videos are
auto generated using the Grand Theft Auto (GTA)
game engine. The dataset contains 512 videos of
500k frames and with almost 10M accurately anno-
tated. Since the dataset is not annotated with person
bounding boxes, we adapt the human pose estimation
annotations as follows. We take the 22 body joints of
each person and fit a tight bounding box around them,
a similar process to (Amato et al., 2019). For abla-
tion studies we randomly select 25 videos which we
denominate small-JTA.
Evaluation Metrics. We use the CLEAR (Kasturi
et al., 2009) and IDF1 (Ristani et al., 2016) metrics for
MOT evaluation. For object detection, we report the
Average Precision using the official MOT17Det eval-
uation protocol. To compare with state-of-art meth-
ods, we evaluate on the test set by submitting our re-
sults to the official MOT test server. Also, we divide
the provided train set into two subsets: one for train-
ing and one for validation, and use the validation set
for ablation study.
6.2 Results and Comparative Analysis
Evaluation Multi-Object Tracking. We show MOT
performance of our proposed method in MOT17 test
set and compare with published state-of-the-art meth-
ods in table 1. Our approach has achieved comparable
results compared to other methods outlined in table 1.
Most methods featured on the MOT17 challenge use
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
532

public detections provided with the training data or
utilize external detectors for bounding box extraction.
On that basis, TubeTK (Pang et al., 2020) and JD-
MOT (Wang et al., 2020) are most suitable joint de-
tection and tracking approaches comparable to ours.
Our method outperforms JDMOT in all metrics ex-
cept FP. Compared to TubeTK (Pang et al., 2020),
our method performs worse though without using any
post-processing approach such as TubeNMS. Unlike
TubeTK, our approach does not use 3D heads for de-
tection and bounding boxes are detected per-frame.
The use of 3D heads causes TubeTK to output bound-
ing box tubes directly at different scales. While this
relegates the task of linking bounding boxes to the de-
tector, it brings in additional complexity. For instance,
suppression of duplicate tubes requires two hyperpa-
rameters, which is difficult to tune. On the other hand
our method has a single 2D NMS which has one sin-
gle parameter.
6.3 Ablation Studies
We perform ablation studies on the small-JTA dataset
due to its smaller size and also due to a limitation of 4
maximum submissions to MOT challenge (Leal-Taix
´
e
et al., 2015) website. We perform a total of 5 ablation
studies; each reflecting the relevance of one important
component of our framework as described below
Impact of Triplet Loss:
Table 3: Impact of incorporating triplet loss (Dong
and Shen, 2018) in equation 7 on MOTA of small-JTA
dataset. Improvement ( in % is computed as (with - with-
out)/(without).
Triplet Loss MOTA
Without 0.5437
With 0.5679
Improvement 4.45%
Table 3 shows that a 4.45% improvement in MOTA is
observed on incorporation of the triplet loss in equa-
tion 7. As explained in section 4.4, the anchor and
positive samples of triplet loss are taken as the track-
let feature and a randomly chosen bounding box (of
the same identity feature, all bounding box features
corresponding to the same identity are driven towards
their mean which is the feature of the entire tracklet.
As a result, triplet loss incorporation in equation 7,
assists in creating distinct clusters of features; each
cluster corresponding to a unique identity. This helps
in minimizing identity switches as tracklets are linked
across different minibatches of a video.
Impact of Self-attention GAT Layers:
Table 4: Impact of using GAT layers for tracklet link predic-
tion vis-
`
a-vis directly predicting links by computing inner
product of ROI-aligned features of bounding boxes.
Self-attention MOTA
Without 0.5229
With 0.5679
Improvement 8.6%
To study the quantitative impact of using GAT layers
for tracklet link prediction, we directly used the graph
G(V, E) in section 4.3 and created edge features by in-
ner product. Table 4 shows that about 8.6% improve-
ment is obtained in MOTA metric on usage of GAT
layers. Self-attention mechanism in GAT (Veli
ˇ
ckovi
´
c
et al., 2017) ensures semantically more meaningful
graph transformation thereby improving edge features
in case of occlusion.
Impact of Repulsion Loss:
Table 5: Repulsion loss boosts up to 3.99%.
Regression Loss AP
Smooth-L1 0.6713
Repulsion 0.6981
Improvement 3.99%
Repulsion loss (Wang et al., 2018) plays an important
role in our approach as shown in table 5 where the
AP on the samll-JTA dataset improves by nearly 4%.
Repulsion loss decreases the number of false positive
detections and therefore reduces the number of irrele-
vant nodes in our graph.
Impact of Feature Pyramids:
Table 6: FPN provides a significant nearly 5.6% improve-
ment in AP over small-JTA dataset.
FPN AP
Without 0.6610
With 0.6981
Improvement 5.6%
Feature pyramids add some memory overhead as fea-
ture maps from multiple layers need to be stored for
top-down and lateral processing. Table 6 shows that
on the small-JTA dataset, we notice (table 6) a signif-
icant improvement of 5.6% in terms of AP. Therefore
though the added memory overhead prevents us from
processing large number of video frames simultane-
ously, FPN enables us to capture more true-positives
thereby improving the overall performance of our ap-
proach.
DeTracker: A Joint Detection and Tracking Framework
533

Number of Simultaneous Frames Processed:
Table 7: Effect of changing number of frames simultane-
ously processed by our approach.
# Frames MOTA
4 0.5679
6 0.5658
Change from 4 to 6 frames -0.3%
Due to added memory overhead by FPN, we are un-
able to process large number of frames simultane-
ously. It is of interest to process large number of
frames to capture long-term spatio-temporal nature of
tracklets. As shown in table 7, we observe the per-
formance dip slightly on moving from 4 to 6 frames.
We believe this to be due to a more complex graph
as well as due to training perturbations. We aim for
a more exhaustive analysis of this ablation to a future
work.
7 DISCUSSION
In order to understand the benefits and caveats of De-
Tracker, it is necessary to analyze how the different
aspects of our architecture compare with state-of-start
approaches.
7.1 Feature Extraction
In DeTracker, we utilize ROI-Alignment (He et al.,
2017), this method allows us to perform feature ex-
traction directly from our networks’ embedding ten-
sors without needing extra layers. In contrast, ex-
isting tracking methods extract features by feeding
the cropped bounding-boxes to multiple layers in a
reid fashion scheme, these networks output similar-
ity scores between patches of ids that are needed for
data association. This approach increases the com-
plexity of the framework, adds cumbersome time,
and in most cases needs multiple training stages. It
is true that revisiting the bounding-box for feature
extraction improves considerably the similarity mea-
sures but at what cost? It is possible for DeTracker
to adopt these re-id implementation as many trackers
(Bergmann et al., 2019; Ristani and Tomasi, 2018)
do, but in the spirit of simplifying the models De-
Tracker uses a straightforward solution that does not
need multiple training stages for feature extraction.
7.2 Post-processing Heuristics
In order to have online tracking algorithms we need
to only look at past and present frames, DeTracker is
truly online. Methods such (Bergmann et al., 2019;
Pang et al., 2020) claim to be online but due to post-
processing and additional steps to create final trajec-
tories are only near-online. In (Pang et al., 2020) the
overlapping of frames is a crucial factor that gives
the method a leeway in which multiple btubes need
to be processed in order to create final trajectories.
The online status of (Bergmann et al., 2019) is incum-
bent upon the size (i.e number of layers) of the ReID
networks incorporated and moreover requires exter-
nal data for effective training. Therefore a change
in the ReID network to incorporate real life runtime
constraints can potentially disrupt the online nature
of (Bergmann et al., 2019), while this is not the case
with our approach.
8 FUTURE WORK
To conclude our analysis, we bring forward two ap-
proaches how to utilize DeTracker as a starting point
for future research.
DeTracker with Extensions. Apply DeTracker to a
given set of tracklets and extend it with tracking spe-
cific methods, given that we already proportion em-
beddings for each tracklet identity. Scenarios with
large and highly visible objects will be covered by the
frame to frame bounding box regression. For the re-
maining, it seems most promising to implement a mo-
tion model, taking into account the individual move-
ments of objects. In addition, such a motion predictor
reduce the necessity for an advanced killing policy.
Tracklet Generation. Analogous to tracking-by-
detection, we propose a tracking-by-tracklet ap-
proach. Indeed, many algorithms already use track-
lets as input, as they are richer in information for com-
puting motion or appearance models. However, usu-
ally a specific tracking method is used to create these
tracklets. We advocate the exploitation of our tracklet
detector itself, not only to create sparse detections, but
clip to clip tracklets. The remaining complex tracking
cases ought to be tackled by a subsequent tracking
method.
In this work, we have formally defined those hard
cases, analyzing the situations in which not only our
method but other dedicated tracking solutions fail.
And by doing so, we question the current focus of re-
search in multi-object tracking, in particular, the miss-
ing confrontation with challenging tracking scenarios.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
534

9 CONCLUSION
In this paper we propose an approach to jointly detect
and track multiple targets in a video stream. Our work
capitalises on existing developments in backbone ar-
chitectures, object detection and attention mecha-
nisms to facilitate end-to-end training of both detec-
tion and multi-target tracking. This reinforces the idea
that detection and tracking are complementary opera-
tions and thus indeed can be performed together. We
view this work as a solid baseline to which refine-
ments which form our future work can give way to
better and faster frameworks which can be integrated
with other high-level computer vision tasks.
REFERENCES
Amato, G., Ciampi, L., Falchi, F., Gennaro, C., and
Messina, N. (2019). Learning pedestrian detection
from virtual worlds. In International Conference of
Image Analysis and Processing (ICIAP), pages 302–
312.
Beery, S., Wu, G., Rathod, V., Votel, R., and Huang, J.
(2020). Context r-cnn: Long term temporal context
for per-camera object detection. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 13075–13085.
Berclaz, J., Fleuret, F., Turetken, E., and Fua, P. (2011).
Multiple object tracking using k-shortest paths opti-
mization. IEEE transactions on pattern analysis and
machine intelligence, 33.
Bergmann, P., Meinhardt, T., and Leal-Taix
´
e, L. (2019).
Tracking without bells and whistles. In The IEEE In-
ternational Conference on Computer Vision (ICCV).
Carreira, J. and Zisserman, A. (2017). Quo vadis, action
recognition? a new model and the kinetics dataset.
In proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 6299–6308.
Chu, P. and Ling, H. (2019). Famnet: Joint learning of
feature, affinity and multi-dimensional assignment for
online multiple object tracking. 2019 IEEE/CVF In-
ternational Conference on Computer Vision (ICCV),
pages 6171–6180.
Dehghan, A., Modiri Assari, S., and Shah, M. (2015).
Gmmcp tracker: Globally optimal generalized max-
imum multi clique problem for multiple object track-
ing. In Proceedings of the IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 4091–
4099.
Dong, X. and Shen, J. (2018). Triplet loss in siamese net-
work for object tracking. In Proceedings of the Euro-
pean Conference on Computer Vision (ECCV), pages
459–474.
Fabbri, M., Lanzi, F., Calderara, S., Palazzi, A., Vezzani, R.,
and Cucchiara, R. (2018). Learning to detect and track
visible and occluded body joints in a virtual world. In
European Conference on Computer Vision (ECCV).
Fang, K., Xiang, Y., Li, X., and Savarese, S. (2018). Recur-
rent autoregressive networks for online multi-object
tracking. pages 466–475.
Farenzena, M., Bazzani, L., Perina, A., Murino, V., and
Cristani, M. (2010). Person re-identification by
symmetry-driven accumulation of local features. In
2010 IEEE computer society conference on computer
vision and pattern recognition, pages 2360–2367.
IEEE.
Feichtenhofer, C., Pinz, A., and Zisserman, A. (2017). De-
tect to track and track to detect. In 2017 IEEE Interna-
tional Conference on Computer Vision (ICCV), pages
3057–3065.
Feng, W., Hu, Z., Wu, W., Yan, J., and Ouyang, W. (2019).
Multi-object tracking with multiple cues and switcher-
aware classification. CoRR, abs/1901.06129.
Gori, M., Monfardini, G., and Scarselli, F. (2005). A new
model for learning in graph domains. In Proceedings.
2005 IEEE International Joint Conference on Neural
Networks, 2005., volume 2, pages 729–734 vol. 2.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
Henaff, M., Bruna, J., and LeCun, Y. (2015). Deep con-
volutional networks on graph-structured data. arXiv
preprint arXiv:1506.05163.
Henschel, R., Zou, Y., and Rosenhahn, B. (2019). Multi-
ple people tracking using body and joint detections.
In Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR) Work-
shops.
Jiang, H., Fels, S., and Little, J. J. (2007). A linear pro-
gramming approach for multiple object tracking. In
2007 IEEE Conference on Computer Vision and Pat-
tern Recognition, pages 1–8.
Kang, K., Li, H., Xiao, T., Ouyang, W., Yan, J., Liu, X.,
and Wang, X. (2017). Object detection in videos with
tubelet proposal networks. 2017 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 889–897.
Kang, K., Ouyang, W., Li, H., and Wang, X. (2016). Ob-
ject detection from video tubelets with convolutional
neural networks.
Kasturi, R., Goldgof, D., Soundararajan, P., Manohar, V.,
Garofolo, J., Bowers, R., Boonstra, M., Korzhova, V.,
and Zhang, J. (2009). Framework for performance
evaluation of face, text, and vehicle detection and
tracking in video: Data, metrics, and protocol. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 31(2):319–336.
Kim, C., Li, F., Ciptadi, A., and Rehg, J. M. (2015). Mul-
tiple hypothesis tracking revisited. In 2015 IEEE In-
ternational Conference on Computer Vision (ICCV),
pages 4696–4704.
Kim, H.-U. and Kim, C.-S. (2016). Cdt: Cooperative detec-
tion and tracking for tracing multiple objects in video
sequences. volume 9910, pages 851–867.
Kipf, T. N. and Welling, M. (2016). Semi-supervised clas-
sification with graph convolutional networks. arXiv
preprint arXiv:1609.02907.
DeTracker: A Joint Detection and Tracking Framework
535

Kuo, C. and Nevatia, R. (2011). How does person iden-
tity recognition help multi-person tracking? In CVPR
2011, pages 1217–1224.
Leal-Taix
´
e, L., Milan, A., Reid, I., Roth, S., and Schindler,
K. (2015). MOTChallenge 2015: Towards a bench-
mark for multi-target tracking. arXiv:1504.01942
[cs]. arXiv: 1504.01942.
Lenz, P., Geiger, A., and Urtasun, R. (2014). Followme:
Efficient online min-cost flow tracking with bounded
memory and computation.
Li, J., Wang, J., Tian, Q., Gao, W., and Zhang, S. (2019).
Global-local temporal representations for video per-
son re-identification. In Proceedings of the IEEE
International Conference on Computer Vision, pages
3958–3967.
Li Zhang, Yuan Li, and Nevatia, R. (2008). Global data
association for multi-object tracking using network
flows. In 2008 IEEE Conference on Computer Vision
and Pattern Recognition, pages 1–8.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017). Feature pyramid networks
for object detection. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2117–2125.
Liu, M., Zhu, M., White, M., Li, Y., and Kalenichenko,
D. (2019). Looking fast and slow: Memory-
guided mobile video object detection. arXiv preprint
arXiv:1903.10172.
Mahadevan, S., Athar, A., O
ˇ
sep, A., Hennen, S., Leal-
Taix
´
e, L., and Leibe, B. (2020). Making a case for
3d convolutions for object segmentation in videos. In
BMVC.
Milan, A., Leal-Taix
´
e, L., Reid, I., Roth, S., and Schindler,
K. (2016). MOT16: A benchmark for multi-object
tracking. arXiv:1603.00831 [cs]. arXiv: 1603.00831.
Milan, A., Leal-Taix
´
e, L., Schindler, K., and Reid, I. (2015).
Joint tracking and segmentation of multiple targets.
2015 IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 5397–5406.
Osep, A., Mehner, W., Voigtlaender, P., and Leibe, B.
(2018). Track, then decide: Category-agnostic vision-
based multi-object tracking. pages 1–8.
Pang, B., Li, Y., Zhang, Y., Li, M., and Lu, C. (2020). Tu-
betk: Adopting tubes to track multi-object in a one-
step training model. In CVPR.
Paszke, A., Gross, S., Chintala, S., Chanan, G., Yang, E.,
DeVito, Z., Lin, Z., Desmaison, A., Antiga, L., and
Lerer, A. (2017). Automatic differentiation in pytorch.
Pirsiavash, H., Ramanan, D., and Fowlkes, C. (2011).
Globally-optimal greedy algorithms for tracking a
variable number of objects. pages 1201 – 1208.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Ristani, E., Solera, F., Zou, R., Cucchiara, R., and Tomasi,
C. (2016). Performance measures and a data set for
multi-target, multi-camera tracking.
Ristani, E. and Tomasi, C. (2018). Features for multi-target
multi-camera tracking and re-identification. In 2018
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 6036–6046.
Sadeghian, A., Alahi, A., and Savarese, S. (2017). Tracking
the untrackable: Learning to track multiple cues with
long-term dependencies. pages 300–311.
Sun, S., Akhtar, N., Song, X., Song, H., Mian, A., and Shah,
M. (2020). Simultaneous detection and tracking with
motion modelling for multiple object tracking. ECCV.
Tang, S., Andriluka, M., Andres, B., and Schiele, B. (2017).
Multiple people tracking by lifted multicut and person
re-identification. In 2017 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
3701–3710.
Tian, Z., Shen, C., Chen, H., and He, T. (2019). Fcos: Fully
convolutional one-stage object detection. In Proceed-
ings of the IEEE international conference on com-
puter vision, pages 9627–9636.
Tran, D., Wang, H., Torresani, L., Ray, J., LeCun, Y.,
and Paluri, M. (2018). A closer look at spatiotem-
poral convolutions for action recognition. In 2018
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 6450–6459.
Veli
ˇ
ckovi
´
c, P., Cucurull, G., Casanova, A., Romero, A., Lio,
P., and Bengio, Y. (2017). Graph attention networks.
arXiv preprint arXiv:1710.10903.
Voigtlaender, P., Krause, M., Osep, A., Luiten, J., Sekar, B.
B. G., Geiger, A., and Leibe, B. (2019). Mots: Multi-
object tracking and segmentation. In 2019 IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 7934–7943.
Wang, X., Xiao, T., Jiang, Y., Shao, S., Sun, J., and Shen,
C. (2018). Repulsion loss: Detecting pedestrians in
a crowd. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
7774–7783.
Wang, Y., Weng, X., and Kitani, K. (2020). Joint detection
and multi-object tracking with graph neural networks.
arXiv preprint arXiv:2006.13164.
Wang, Z., Zheng, L., Liu, Y., and Wang, S. (2019). To-
wards real-time multi-object tracking. arXiv preprint
arXiv:1909.12605.
Xiu, Y., Li, J., Wang, H., Fang, Y., and Lu, C. (2018). Pose
Flow: Efficient online pose tracking. In BMVC.
Xu, Y. and Wang, J. (2019). A unified neural network for
object detection, multiple object tracking and vehicle
re-identification. ArXiv, abs/1907.03465.
Yu, F., Koltun, V., and Funkhouser, T. (2017). Dilated
residual networks. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 472–480.
Zhu, J., Yang, H., Liu, N., Kim, M., Zhang, W., and Yang,
M.-H. (2018). Online multi-object tracking with dual
matching attention networks. In Proceedings of the
European Conference on Computer Vision (ECCV),
pages 366–382.
Zhu, X., Wang, Y., Dai, J., Yuan, L., and Wei, Y. (2017).
Flow-guided feature aggregation for video object de-
tection. In Proceedings of the IEEE International
Conference on Computer Vision, pages 408–417.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
536
