
Semantic Risk-aware Costmaps for Robots in Industrial Applications
using Deep Learning on Abstracted Safety Classes from Synthetic Data
Thomas Weber
1
, Michael Danner
1
, Bo Zhang
2
, Matthias R
¨
atsch
1
and Andreas Zell
3
1
Reutlingen Research Institute, Reutlingen University, Alteburgstrasse 150, 72762 Reutlingen, Germany
2
School of Electronics Information, Xi’an Polytechnic University, Xi’an, China
3
Cognitive Systems, Eberhard-Karls-University T
¨
ubingen, 72076 T
¨
ubingen, Germany
andreas.zell@uni-tuebingen.de
Keywords:
Data Sets for Robot Learning, Deep Learning, Safety in Human and Robot Interaction, Detection and
Recognition.
Abstract:
For collision and obstacle avoidance as well as trajectory planning, robots usually generate and use a simple
2D costmap without any semantic information about the detected obstacles. Thus a robot’s path planning will
simply adhere to an arbitrarily large safety margin around obstacles. A more optimal approach is to adjust this
safety margin according to the class of an obstacle. For class prediction, an image processing convolutional
neural network can be trained. One of the problems in the development and training of any neural network is
the creation of a training dataset. The first part of this work describes methods and free open source software,
allowing a fast generation of annotated datasets. Our pipeline can be applied to various objects and environment
settings and is extremely easy to use to anyone for synthesising training data from 3D source data. We create a
fully synthetic industrial environment dataset with
10 k
physically-based rendered images and annotations. Our
dataset and sources are publicly available at https://github.com/LJMP/synthetic-industrial-dataset. Subsequently,
we train a convolutional neural network with our dataset for costmap safety class prediction. We analyse
different class combinations and show that learning the safety classes end-to-end directly with a small dataset,
instead of using a class lookup table, improves the quantity and precision of the predictions.
1 MOTIVATION
Autonomous industrial robots for logistic transport
often navigate in diverse and dynamic environments.
For collision and obstacle avoidance as well as trajec-
tory planning robots usually generate and use a simple
two-dimensional costmap from a planar 2D laser scan.
These costmaps do not contain any information about
the obstacles: whether they are static or dynamic, mov-
ing in a certain direction or are living beings. There-
fore, a robot’s path planning will simply inflate around
obstacles by an arbitrary large safety margin. This
procedure generalises all obstacles in one category and
is far from the optimal representation, exemplary in
fig. 2a. Around a static obstacle (e.g. a cardboard box,
europallet) the robot could navigate quickly and with
little safety margin. The risk of a collision is limited;
due to the immobility of the obstacle, it is practically
impossible. Dynamic obstacles (e.g. a lift truck) are
likely to change positions and are therefore a risky
category. Humans crossing the path of the robot rep-
resent a high risk and should ideally be avoided by
the robot at a large distance behind of their movement
path direction. To accomplish this behaviour, how-
ever, the costmap would have to provide or contain
this information (risk, direction, etc.). With additional
information a 2D costmap with specific safety margins
can be generated, see fig. 2b.
An image processing convolutional neural network
(CNN) can be trained for this purpose. A challenge in
the development of neural networks is not only the
choice of architecture but also collecting the training
dataset. Neural networks in the field of image process-
ing for scene labelling and object segmentation require
several thousand training images. These images must
contain ground truth annotations and classes for all
the objects of interest in the images. Conventionally,
such datasets consist of real-world images, in which
the objects are painstakingly classified manually.
This procedure is very labour- and time-consuming.
Computer graphics is a powerful tool and capable
of synthesising photo-realistic images. The main
984
Weber, T., Danner, M., Zhang, B., Rätsch, M. and Zell, A.
Semantic Risk-aware Costmaps for Robots in Industrial Applications using Deep Learning on Abstracted Safety Classes from Synthetic Data.
DOI: 10.5220/0010904100003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
984-990
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

(a) plain images, individual classes (b) plain images, safety classes
(c) augmented images, individual classes (d) augmented images, safety classes
Figure 1: Inference results of different configurations on real-world images.
contributions of this work are (1) Introducing and
publishing a tool-set for individual training and
reducing manual procedures by methods allowing
the fast generation of annotated datasets, which
can be applied to various objects and environment
settings and are extremely facile and rapid to use.
(2) Proof of feasibility for training a CNN on a fully
synthetic dataset to generate output information for
enhancing the obstacle 2D costmap and thus enabling
risk-aware navigation of autonomous robots in the
real-world. (3) Providing a fully synthetic industrial
environment dataset with
10 k
physically-based
rendered images and annotations, publicly available at
https://github.com/LJMP/synthetic-industrial-dataset.
(a) standard (b) enhanced
Figure 2: Comparing 2D costmaps containing (1) static wall,
(2) dynamic object contour, (3) human legs, (+) robot posi-
tion.
2 RELATED WORK
Semantic segmentation, labelling and scene under-
standing are central problems in risk-aware robotic
navigation and relevant work is comprehensive. For
machine vision tasks like surface normal prediction,
semantic segmentation, and object boundary detec-
tion in indoor scenes Li et al (Li et al., 2018),
Song et al (Song et al., 2016) present datasets with
millions of interior designs, furniture and object as-
sets and Zhang et al (Zhang et al., 2016) improve the
detection rate with a pretrained synthetic dataset.
Besides annotated indoor scenes (Song et al., 2015),
datasets with an application to autonomous driving
are very popular. In 2012 Geiger et al (Geiger et al.,
2012) equipped a standard station wagon with two
high-resolution colour and grey-scale video cameras
to collect stereo and optical flow image pairs. Menze
and Geiger (Menze and Geiger, 2015) propose a novel
model and dataset for outdoor scenes decomposed
into a small number of independently moving objects.
Synthesising data approaches are also very common
since (deep-)CNNs require lots of parameters from raw
images as input, which has to be annotated manually.
For the SYNTHIA Dataset (Ros et al., 2016) a vir-
tual city with precise pixel-level semantic annotations
Semantic Risk-aware Costmaps for Robots in Industrial Applications using Deep Learning on Abstracted Safety Classes from Synthetic Data
985

has been generated. Wrennige et al (Wrenninge and
Unger, 2018) introduce a synthetic dataset for street
scene parsing and Richter et al (Richter et al., 2016)
reconstruct traffic scenes from game engines.
Datasets of this kind cover domestic indoor and
road traffic scenes, for which real-world annotated
datasets are readily available. This allows comparing
results of transfer-learning and fine-tuning networks
with the respective real-world data.
To the best knowledge of the authors, neither syn-
thetic nor real-world datasets for industrial environ-
ments are widely and freely available. While there
are lots of logistic applications for robots in general
and smart transportation systems, publicly accessible
datasets are noticeably missing.
3 SYNTHESISING THE DATASET
Our work follows a similar approach to the related
work, aiming at semantic segmentation and scene un-
derstanding, but in contrast, our goal is to improve
real-world robot navigation and risk-assessment in fac-
tory logistic applications. The generation procedure
of the aforementioned datasets involves fairly com-
plex and unconventional pipeline setups. We attach
importance to provide easy access to our setup and to
facilitate adjustments and changes to the 3D source
data.
This is why we opted for commonly used free and
open source software (FOSS) in the field of 3D render-
ing: the Blender (2.79b) 3D creation suite (Foundation,
279b) on Ubuntu (16.04). The fully graphical user
interface of Blender enables easy “What You See Is
What You Get” (WYSIWYG) editing of the 3D source
data and the included Python API offers the capability
to control all its functionality.
As studied in (Zhang et al., 2016), physically-based
rendering (PBR) is more computationally expensive,
yet provides better results in training a CNN. The PBR
approch allows overcoming the domain gap with a
limited set of parameters, which mimic the real-world
closely, contrary to Tobin et al (Tobin et al., 2017)
and is a computation and time trade-off. Blender’s
physically-based path tracer for production rendering
is Cycles. It provides physically-based results out-of-
the-box and a flexible node tree feature for manipu-
lating 3D information, shaders, etc. before outputting
the data in a rendering. Thereby various additional
annotations for the same 3D source data can be created
with very little effort required from the user, see e.g
fig. 3c.
The final dataset consists of
10 k
physically based
rendering RGB images with accompanying pixel-
perfect object instance ground truth bit-masks. These
bit-masks are convertible to binary mask and bounding
box annotations in the commonly used COCO format
(Lin et al., 2014).
Our dataset creation process is as follows: (1) Set
up a 3D scene with readily available high quality 3D
models from e.g. (TurboSquid, 2021; Sketchfab, 2021;
Models, 2021; CGTrader, 2021; BlendFab, 2021).
Shaders of these models
1
must be compliant to PBR or
updated to a “Principled BSDF”, (2) Use PBR lights in-
door as well as high dynamic range
360°
photos from
e.g. (Zaal, 2021; Cywka, 2021; Reimer, 2021) for real-
istic HDR image-based scene lighting, (3) Define valid
positions for the render camera (corresp. positions
a robot will likely traverse) by weight-painting mesh
vertices in the scene. This method avoids complicated
programmatic checks for whether the camera would be
placed randomly inside an object, (4) Program a script
utilising the Blender Python API to step the camera
through the 3D scene and randomly change camera
angles in a defined interval for each rendering. Ad-
ditional conditions for object count and coverage are
also in this script; e.g. to avoid rendering an image of
just a wall.
To accomplish the pixel-perfect object instance
ground truth annotation our Python script once assigns
a unique so called “PassIndex ” to every object in the
3D scene. This object instance mapping is saved for
later reference. For any rendered
png
RGB image the
PassIndex values — representing the object instances
in this image — are all rendered pixel-wise into a sep-
arate OpenEXR (
exr
) file. A sample RGB image is
depicted in fig. 3a and fig. 3b shows the corresponding
bit-masks in
exr
. The
exr
format saves the PassIndex
value as is (no value mapping) and thus allows up to
2
32
different objects within an image.
Rendering the bit-masks combined into an
exr
file reduced computation time. Further, changing the
mapping in post-process conversion of bit-masks to a
COCO annotation
json
file allows grouping of object
instances into classes as desired. For the conversion to
COCO annotation, we use pycococreator (waspinator,
2018). The
exr
file is read into a Numpy array and each
PassIndex value is singled out into a binary mask. This
mask is saved into the
json
as an instance annotation
with a class according to its mapping.
We render on a single machine with a Nvidia Ti-
tan X (11GB) and an Intel i7-6800. Final renders are
1280 × 720
pixels at 600 samples with denoising as a
reasonable trade-off between RGB image quality and
1
The authors highly advise to use “object instances with
linked mesh data”. Simply copying models will duplicate
mesh data and increase memory consumption and render
time immensely!
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
986
(a) RGB image
(b) Combined bit-masks
(c) Depth render pass
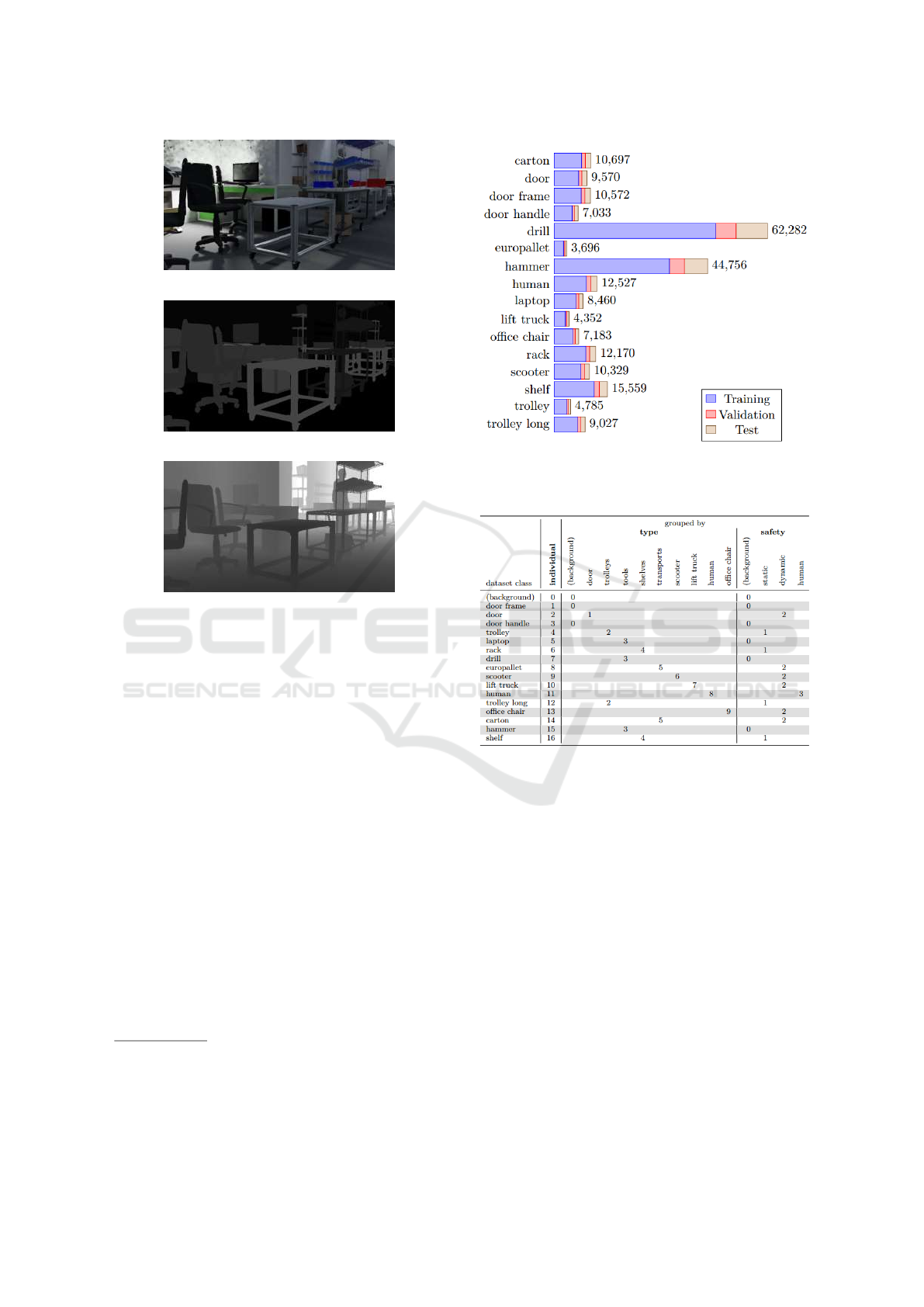
Figure 3: A rendering with annotations.
computation time. Please see our public source data
for further details on Blender setup and scripts.
2
Our final dataset consists of
10 k
images, split as
follows: (a) 7500 training, (b) 1000 validation and
(c) 1500 test images. The raw classes of objects in the
dataset are deduced from the used 3D models (bold
number denotes class ID):
0
background (ceiling, floor,
wall),
1
door frame,
2
door,
3
door handle,
4
trol-
ley,
5
laptop,
6
rack,
7
drill,
8
europallet,
9
scooter,
10
lift truck,
11
human,
12
trolley long,
13
office chair,
14 carton, 15 hammer and 16 shelf.
The total number of class instances and split dis-
tribution over all
10 k
images is depicted in fig. 4. Ex-
amples of plain, unaltered RGB image renderings are
shown in fig. 5.
4 EXPERIMENT SETUP
Our hypothesis is training a CNN directly end-to-end
for safety classes – instead of individual classes and
2
The authors are aware of the new Blender release 2.80
and it’s new physically-based real-time renderer Eevee. At
the time of dataset creation the Eevee render engine produced
unacceptable lighting artefacts. Also, the PassIndex method
breaks and would need significant changes to work in Eevee.
Figure 4: Total number of raw class instances and split
distribution in the dataest.
Table 1: Different class grouping and IDs.
using a lookup table to map class to safety category –
improves the overall performance in detection quantity
and precision. Especially small datasets benefit by this
approach to reduce class variance.
As humans are the most critical factor for risk-
aware navigation of autonomous robots, “human” is
always a separate class. Grouping similar type objects
may improve the precision, as the dataset contains very
similar objects (e.g. rack and shelf), which could be
easily confused and therefore could lower the score.
Consequently, we propose three different class
groupings on our dataset for experiments: (1) All
dataset objects as their individual class, (2) similar
objects grouped by type class, (3) objects directly
grouped into safety classes. These groupings with
the object class IDs are stated in table 1.
We chose the Mask R-CNN architecture (He et al.,
2017) for our initial experiments. It is capable of ob-
ject instance segmentation with the prediction of both
masks and bounding boxes in parallel and has proven
Semantic Risk-aware Costmaps for Robots in Industrial Applications using Deep Learning on Abstracted Safety Classes from Synthetic Data
987

Figure 5: Examples of plain, unaltered renderings.
to generalise well in a broad range of other tasks. Read-
ers are encouraged to test other architectures with our
dataset. Masks and bounding box output information
are deemed useful in post-process enhancement of a
robot’s costmap.
We start each training initialised with pre-trained
COCO weights. The following are our hyper parame-
ters and procedure: (a) backbone “resnet50”, (b) learn-
ing rate
10
−3
,
(c) image dimensions
1280 × 1280
pix-
els, (d) batch size
2
, (e) training the first ten epochs
layers “heads”, (f) and concluding with five epochs
fine-tuning layers “all”.
Overfitting on the dataset is to be expected, due to
its small size, but this effect may not show in only 15
training epochs. However, we want to ensure predic-
tions on real-world images are feasible. Therefore we
repeat the three experiments with augmented images,
as seen in fig. 6, to obtain a more robust preliminary
score. Multiple of the following augmentations are ap-
plied to the RGB images in memory at random: (1) hor-
izontal flip, (2) motion blur, (3) dropout and noises,
(4) hue and saturation shift, (5) perspective transform.
By augmenting “live” in training, the network will
practically never be exposed to the same dataset image
twice.
5 RESULTS
The results of our six experiments are displayed in
table 2 with the configurations stated in section 4. The
score per class is the mean of all scores on the testset
calculated at an IoU of at least
50 %
on the bounding
boxes.
Comparing the experiments on plain versus aug-
mented images, on average a
11 %
-points drop in score
shows. The decrease is owed to the same amount of
fifteen training epochs on yet a much more diverse
image input. The testset images are never augmented.
Real-world image input will diverge even more from
the testset, which is of our interest.
We observe an overall increase from the grouping
“individual” over “type” to “safety”. The same increase
also arises in “safety class by lookup” scores. Scores
of these looked up “dynamic”, “human” and “static”
classes are computed from the respective classes as
defined in table 1. The grouping has virtually no effect
on the “human” class. The results confirm our previ-
ously established hypothesis, training end-to-end for
safety classes instead of a lookup table, on sparse data
improves performance. A CNN seems able to abstract
more similarities in the different objects concerning
their “safety” aspect. This is also apparent in real-
world images inference results, shown in fig. 1. Keep
in mind, the trained network has never seen compara-
ble real-world data tantamount to our synthetic dataset
in training. Apparently, it is problematic for Mask R-
CNN to learn concave / cutout masks, nonetheless the
bounding boxes fit the object shape closely. In fig. 1b
the network trained on the “safety” grouping shows
more small objects detections in the background. The
same can be noticed in fig. 1d. This represents an in-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
988
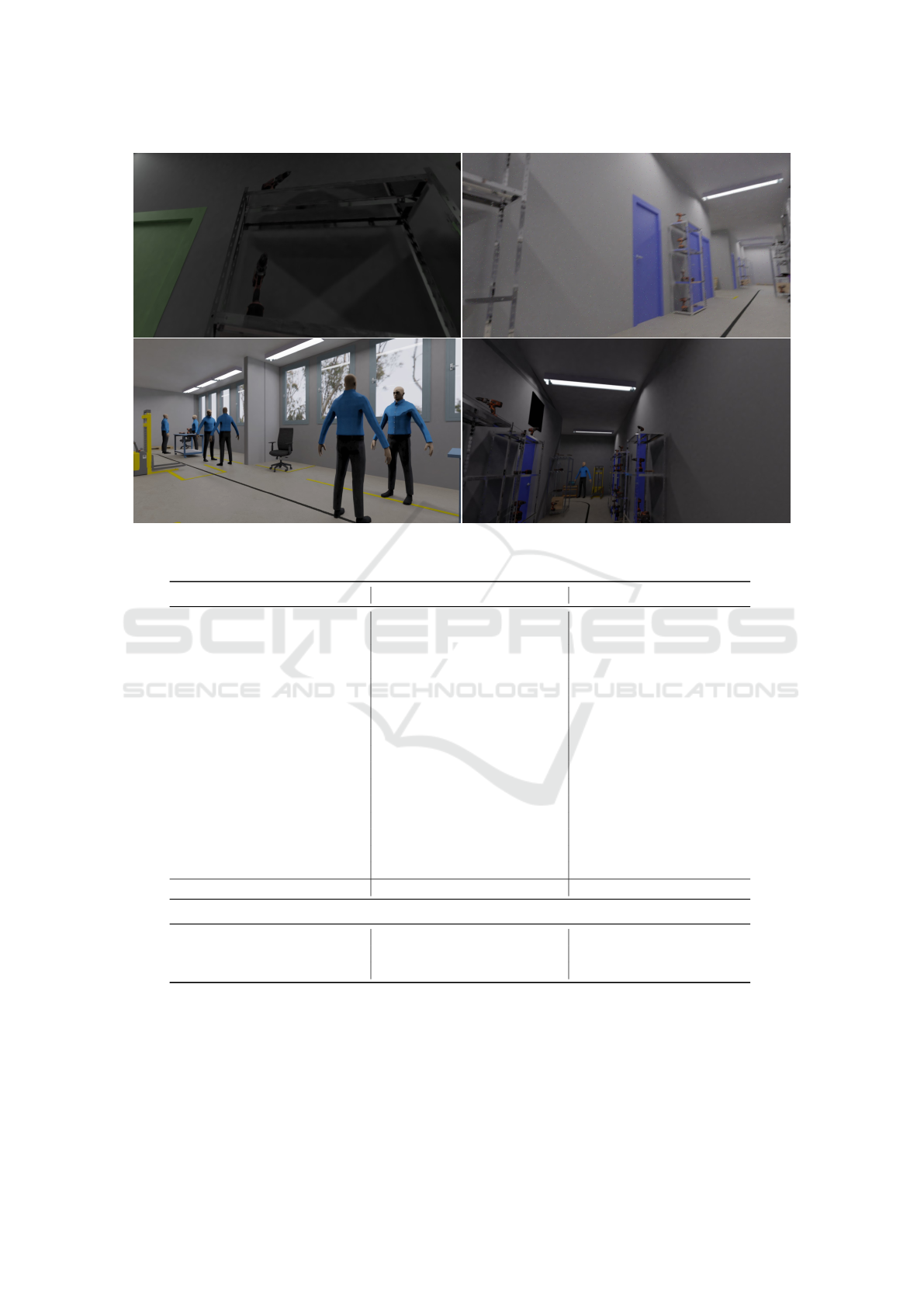
Figure 6: Examples of augmented images.
Table 2: Class mAP
50
[%] of different configurations on testset.
individual plain augm. type plain augm. safety plain augm.
carton 81.76 75.91 door 82.80 75.28 dynamic 80.17 69.46
door 73.63 52.36 human 81.68 71.13 human 83.85 77.64
door frame 51.43 21.50 lift truck 83.17 77.07 static 72.13 58.70
door handle 53.82 48.85 office chair 83.67 72.98
drill 68.72 62.60 scooter 87.92 76.70
europallet 79.52 73.71 shelves 59.14 48.16
hammer 43.70 34.69 trolleys 76.20 62.57
human 82.84 78.83 tools 61.12 54.75
laptop 66.52 57.13 transports 37.33 25.72
lift truck 87.78 76.81
office chair 80.65 69.67
rack 49.89 36.67
scooter 40.16 25.64
shelf 61.76 50.16
trolley 70.95 58.63
trolley long 81.63 69.67
average 66.05 54.90 average 70.85 60.72 average 77.78 66.88
safety class by lookup
dynamic 73.92 62.35 dynamic 74.98 65.55
human 82.84 78.83 human 81.68 71.13
static 66.06 53.78 static 67.67 55.37
formation advantage in enhancing a robot’s obstacle
costmap. A greater amount of the surroundings are
assets for risk in navigation.
6 CONCLUSION AND FURTHER
WORK
We introduce a fully synthetic industrial environ-
ment dataset with
10 k
physically-based rendered
Semantic Risk-aware Costmaps for Robots in Industrial Applications using Deep Learning on Abstracted Safety Classes from Synthetic Data
989

images and annotations. A pipeline is presented,
which can be applied to various objects and environ-
ment settings and is extremely facile to use to any-
one for synthesising training data from 3D source
data. Annotated data, 3D source data, scripts and
tutorials are published at https://github.com/LJMP/
synthetic-industrial-dataset.
We show in multiple experiments, directly learning
safety classes end-to-end on our dataset, instead of
using a lookup table, substantially increases the predic-
tion scores and quality on real-world data. This con-
firms our hypothesis that small datasets benefit from
training abstracted similarities in different objects.
The results from these experiments prove the bene-
fit of using our dataset for logistic-relevant industrial
tasks. Expanding experiments with our dataset on
different architectures can consolidate the effect of
grouping on network performance. Additionally, our
pipeline allows synthesising new datasets for novel
scenes and environments, like consumer stores, ware-
houses and groceries stores.
Further work on this research focuses on creating a
ROS-compatible (Garage and Laboratory, 2021) drop-
in replacement for the commonly used 2D costmap
generator (Marder-Eppstein et al., 2021). This will
allow a robot’s trajectory planning to take a more op-
timal approach. The safety-class-adjusted margin to
an obstacle in the semantic costmap can now be con-
sidered, instead of a blunt arbitrary margin around
obstacles, thus enabling a risk-aware navigation, as
previously described in fig. 2.
ACKNOWLEDGEMENTS
This work is partially supported by a grant of the
BMWi ZIM program, no. ZF4029424HB9
REFERENCES
BlendFab (2021). 5000+ Different free assets available for
download.
CGTrader (2021). Search thousands of 3D models on sale.
Cywka, H. A. (2021). HDRi maps for CG artists.
Foundation, B. (v2.79b). Blender free and open source
complete 3D creation pipeline.
Garage, W. and Laboratory, S. A. I. (2021). The Robot
Operating System (ROS).
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? The KITTI vision benchmark
suite. In 2012 IEEE Conference on Computer Vision
and Pattern Recognition, Providence, RI, USA, June 16-
21, 2012, pages 3354–3361. IEEE Computer Society.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. B. (2017).
Mask R-CNN. CoRR, abs/1703.06870.
Li, W., Saeedi, S., McCormac, J., Clark, R., Tzoumanikas,
D., Ye, Q., Huang, Y., Tang, R., and Leuteneg-
ger, S. (2018). InteriorNet: Mega-scale Multi-
sensor Photo-realistic Indoor Scenes Dataset. CoRR,
abs/1809.00716.
Lin, T., Maire, M., Belongie, S. J., Bourdev, L. D., Girshick,
R. B., Hays, J., Perona, P., Ramanan, D., Doll
´
ar, P.,
and Zitnick, C. L. (2014). Microsoft COCO: Common
Objects in Context. CoRR, abs/1405.0312.
Marder-Eppstein, E., Lu!!, D. V., and Hershberger, D. (2021).
costmap 2d.
Menze, M. and Geiger, A. (2015). Object scene flow for au-
tonomous vehicles. In IEEE Conference on Computer
Vision and Pattern Recognition, CVPR 2015, Boston,
MA, USA, June 7-12, 2015, pages 3061–3070. IEEE
Computer Society.
Models, B. D. (2021). The Original Blender 3D Model
Repository.
Reimer, A. (2021). royalty free assets for your cgi produc-
tions.
Richter, S. R., Vineet, V., Roth, S., and Koltun, V. (2016).
Playing for Data: Ground Truth from Computer
Games. In Leibe, B., Matas, J., Sebe, N., and Welling,
M., editors, European Conference on Computer Vi-
sion (ECCV), volume 9906 of LNCS, pages 102–118.
Springer International Publishing.
Ros, G., Sellart, L., Materzynska, J., V
´
azquez, D., and L
´
opez,
A. M. (2016). The SYNTHIA Dataset: A Large Collec-
tion of Synthetic Images for Semantic Segmentation of
Urban Scenes. In 2016 IEEE Conference on Computer
Vision and Pattern Recognition, CVPR 2016, Las Vegas,
NV, USA, June 27-30, 2016, pages 3234–3243. IEEE
Computer Society.
Sketchfab (2021). Publish & find 3D models online.
Song, S., Lichtenberg, S. P., and Xiao, J. (2015). SUN
RGB-D: A RGB-D scene understanding benchmark
suite. In 2015 IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), pages 567–576.
Song, S., Yu, F., Zeng, A., Chang, A. X., Savva, M., and
Funkhouser, T. A. (2016). Semantic Scene Completion
from a Single Depth Image. CoRR, abs/1611.08974.
Tobin, J., Fong, R., Ray, A., Schneider, J., Zaremba, W., and
Abbeel, P. (2017). Domain randomization for transfer-
ring deep neural networks from simulation to the real
world. In 2017 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), pages 23–30.
TurboSquid, I. (2021). Free 3D Models and Commercial
Use 3D Models.
waspinator (2018). pycococreator is a set of tools to help
create coco datasets.
Wrenninge, M. and Unger, J. (2018). Synscapes: A Pho-
torealistic Synthetic Dataset for Street Scene Parsing.
CoRR, abs/1810.08705.
Zaal, G. (2021). high quality HDRIs for free, no catch.
Zhang, Y., Song, S., Yumer, E., Savva, M., Lee, J., Jin,
H., and Funkhouser, T. A. (2016). Physically-Based
Rendering for Indoor Scene Understanding Using Con-
volutional Neural Networks. CoRR, abs/1612.07429.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
990
