
Transfer Learning via Test-time Neural Networks Aggregation
Bruno Casella
1,2 a
, Alessio Barbaro Chisari
3,4 b
, Sebastiano Battiato
4 c
and Mario Valerio Giuffrida
5 d
1
Department of Computer Science, University of Torino, Torino, Italy
2
Department of Economics and Business, University of Catania, Catania, Italy
3
Department of Civil Engineering and Architecture, University of Catania, Catania, Italy
4
Department of Mathematics and Computer Science, University of Catania, Catania, Italy
5
School of Computing, Edinburgh Napier University, Edinburgh, U.K.
Keywords:
Parameter Aggregation, Transfer Learning, Selective Forgetting.
Abstract:
It has been demonstrated that deep neural networks outperform traditional machine learning. However, deep
networks lack generalisability, that is, they will not perform as good as in a new (testing) set drawn from a
different distribution due to the domain shift. In order to tackle this known issue, several transfer learning
approaches have been proposed, where the knowledge of a trained model is transferred into another to im-
prove performance with different data. However, most of these approaches require additional training steps,
or they suffer from catastrophic forgetting that occurs when a trained model has overwritten previously learnt
knowledge. We address both problems with a novel transfer learning approach that uses network aggregation.
We train dataset-specific networks together with an aggregation network in a unified framework. The loss
function includes two main components: a task-specific loss (such as cross-entropy) and an aggregation loss.
The proposed aggregation loss allows our model to learn how trained deep network parameters can be aggre-
gated with an aggregation operator. We demonstrate that the proposed approach learns model aggregation at
test time without any further training step, reducing the burden of transfer learning to a simple arithmetical
operation. The proposed approach achieves comparable performance w.r.t. the baseline. Besides, if the aggre-
gation operator has an inverse, we will show that our model also inherently allows for selective forgetting, i.e.,
the aggregated model can forget one of the datasets it was trained on, retaining information on the others.
1 INTRODUCTION
Deep Learning (DL) has demonstrated superior per-
formance than traditional ML methods in a variety of
tasks. This is due to being able to extract discrimi-
native features from the data for the task at hand via
end-to-end training. Such discriminative features are
suitable for the dataset the network was trained on.
However, a deep network will not perform as good
as in a different dataset due to the domain shift (or
dataset bias) (Zhao et al., 2020).
A way to address the domain shift is via Trans-
fer Learning (TL), where the information learnt by
a trained network is (re)used in another context.
a
https://orcid.org/0000-0002-9513-6087
b
https://orcid.org/0000-0002-7831-382X
c
https://orcid.org/0000-0001-6127-2470
d
https://orcid.org/0000-0002-5232-677X
Several approaches to transfer learning have been
proposed in literature, such as sample reweighting
(Sch
¨
olkopf et al., 2007), feature distributions minimi-
sation (Tzeng et al., 2017; Litrico et al., 2021), dis-
tillation (Hinton et al., 2015), and so on (for a recent
survey on TL, please read (Zhuang et al., 2021)).
However, transfer learning techniques may be af-
fected by catastrophic forgetting (Goodfellow et al.,
2013), where a network forgets the information learnt
from a previous task when transferred to a new one.
Furthermore, generally, transfer learning requires fur-
ther training steps to accommodate for new data, even
though the learnt task remains unchanged.
The benefit of transfer learning has been demon-
strated extensively in the last years (Weiss et al.,
2016), even in distributed training scenario (Chen
et al., 2020). In this context, a central model is
trained on several datasets that have never directly
seen, as they are located in different machines (feder-
642
Casella, B., Chisari, A., Battiato, S. and Giuffrida, M.
Transfer Learning via Test-time Neural Networks Aggregation.
DOI: 10.5220/0010907900003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
642-649
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

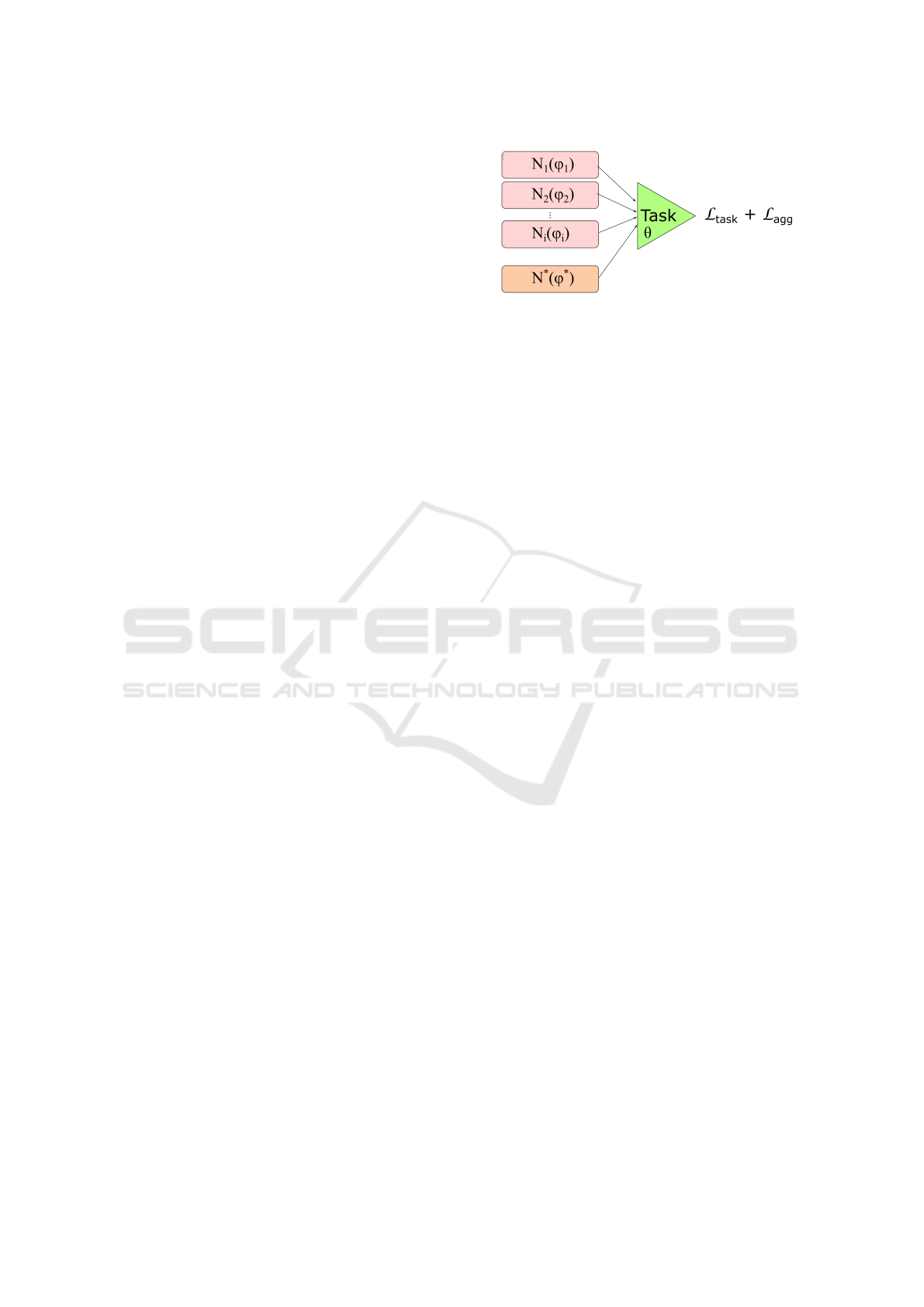
Figure 1: Pictorial representation of the proposed method that performs test-time neural network aggregation.
ated learning). However, this training paradigm raised
another question: what if one (or more) datasets used
to train the centrally trained model needs to be re-
moved? Machine unlearning (Golatkar et al., 2021) is
studied for several reasons, especially when sensible
data are used (e.g., medical imaging). However, it is
generally hard to selectively scrub the parameters of a
model such that it cannot perform well on a portion of
the dataset, whilst it retains comparable performance
as before on the rest of the dataset.
In this paper, we propose a new proof-of-concept
technique to TL that inherently allows for selec-
tive forgetting by aggregating the network parameters
without any further training. This can be applied to
different datasets, assuming they all share the same
task. Our approach is represented in Figure 1 and
works as follows: we train a VGG-like (Simonyan
and Zisserman, 2015) deep neural network for each
dataset – we will refer to these networks as N
i
, for
i = 1, ...,n, with n being the number of datasets. In
addition, a VGG-like network – named N
∗
– is also
trained taking all the datasets as inputs. All the net-
works are trained end-to-end with a aggregation regu-
lariser, ensuring that the weights learnt by N
∗
are ob-
tained as an aggregation for all the other networks N
i
.
This training paradigm will ensure that the networks
N
i
also learn how to be aggregated. Furthermore, re-
quiring that the aggregation function is invertible, our
model inherently allows for selective forgetting. In
our experiments, we set n = 2 datasets, and we used
the sum of weights as network aggregation function
(which can easily be inverted with subtraction), which
is applied to only the parameters of the feature extrac-
tors. All the networks trained within this end-to-end
framework (including N
∗
) share the same classifier.
Experimental results show that test-time network ag-
gregation is possible, outperforming the baseline.
The key contributions of our approach can be sum-
marised as follows:
1. we propose the aggregation regulariser during
training;
2. network aggregation is achieved at test time (no
further training is required);
3. our transfer learning technique does not suffer
from catastrophic forgetting;
4. our approach can also be used for selective for-
getting (assuming networks are aggregated via an
invertible function).
The rest of the paper is organised as follows. In
Section 2, we discuss the recent related works. Sec-
tion 3 outlines our proposed approach. In Section 4,
experimental results are shown and discussed. Fi-
nally, Section 5 concludes the paper.
2 RELATED WORK
The aggregation of network parameters is a form of
transfer learning. Typically, TL generally addresses
a better initial and steeper growth performance (Tom-
masi et al., 2010) by reuse of the convolutional filter
parameters of CNNs. For example, fine-tuning is the
simplest way to achieve transfer learning: a model,
pre-trained on a dataset, e.g. ImageNet (Deng et al.,
2009), is used as starting point for other datasets and
tasks (Reyes et al., 2015). Although intuitive and easy
to do, fine-tuning typically underperforms wrt other
transfer learning approaches (Shu et al., 2021; Han
et al., 2021). More sophisticated methods have been
proposed (Oquab et al., 2014), but several of them
suffer from negative transfer (Rosenstein et al., 2005;
Pan and Yang, 2010; Torrey and Shavlik, 2010; Wang
et al., 2018; Zhuang et al., 2021): the process of trans-
ferring knowledge is harmful because the knowledge
is not transferable across all the domains (in particular
when the source and target datasets are not related).
Another issue affecting transfer learning ap-
proaches is catastrophic forgetting, where new
knowledge permanently replaces information learnt
from previous tasks (Goodfellow et al., 2013). In
fact, several approaches to TL, such as Batch Spectral
Shrinkage (Chen et al., 2019), attempts to solve such
an issue. However, these approaches still rely on a
training procedure to adapt to a new dataset (or task).
However, we asked ourselves the following question:
Transfer Learning via Test-time Neural Networks Aggregation
643
is it possible achieving TL without catastrophic for-
getting at test time? We achieve that by aggregating
the weights of trained networks together.
The idea of aggregating the parameters of deep
neural networks is not new in the literature. A frame-
work that aggregates knowledge from multiple mod-
els is the Transfer-Incremental Mode Matching (T-
IMM) (Geyer et al., 2019), which enables for adap-
tive merging of models. It is a re-interpretation of
IMM (Lee et al., 2017), a work in the context of life-
long learning aiming at the sequential aggregation of
models retaining good performance on all the prior
tasks, rather than on transfer learning. T-IMM be-
longs to the field of incremental learning, a subtly dif-
ferent area concerning lifelong learning, in which the
parameters of the i-th model are used as initialisation
for model i + 1. More recently, Zoo-Tuning was pro-
posed to adaptively aggregate multiple trained models
(Shu et al., 2021). To achieve network aggregation,
the authors proposed the AdaAgg layer. However, this
approach assumes that models are already pre-trained
before being aggregated (involving a two-step learn-
ing). In our work, models are randomly initialised and
then trained once end-to-end and simultaneously.
Lifelong (or continual) learning describes the sce-
nario in which new tasks arrive sequentially and
should be incorporated into the current model, re-
taining previous knowledge (Parisi et al., 2019). Ap-
proaches to lifelong learning are mainly aimed to mit-
igate catastrophic forgetting (Rao et al., 2019; Rama-
puram et al., 2020; Ye and Bors, 2020). According to
Parisi et al. (2019), there are three main approaches
to lifelong learning: (i) retraining with regularisation;
(ii) network expansion; (iii) selective network retrain-
ing and expansion. In the first case, neural networks
are retrained with constraints to prevent forgetting.
Network expansion approaches perform architectural
changes (e.g., adding neurons) to the network to add
novel information. The last approaches update only a
subset of neurons and allow expansion (if necessary).
Our proposed method loosely follows the paradigm
of regularisation approaches with an important differ-
ence: no retraining of the architecture is performed
neither transfer learning nor selective forgetting.
Our approach to network aggregation inherently
allows network decomposition for selective forget-
ting. Recently, several related works have focused on
machine unlearning (Golatkar et al., 2020; Golatkar
et al., 2021). Overall, these approaches assume that
the portion of the dataset that the model should un-
learn is given to a scrub function that aims to remove
the information learnt from the dataset to be forgot-
ten, impacting (although minimally) the performance
of the scrubbed model on the rest of the dataset. Our
Figure 2: Graphical representation of the proposed method.
Each network N
i
is parametrised by a set of weights ϕ
i
. The
aggregated network N
∗
is parametrised by ϕ
∗
. There is no
weight sharing between these networks. However, all the
networks share the same task network (i.e., a classifier). The
total objective function is given as a combination two loss
functions: (i) task loss (i.e., cross-entropy); (ii) aggregation
loss (see Section 3.3).
approach is different: we do not require data to be
provided for selective forgetting. Instead, the aggre-
gated model trained on two (or more) datasets can be
changed by applying the inverse of the aggregation
function (in our case, a simple subtraction).
3 PROPOSED METHOD
Figure 2 displays the proposed approach: the general
idea is to aggregate the weights of two different neu-
ral networks trained on two different datasets (shar-
ing the same underlying task). The ultimate goal is to
obtain n individual networks N
i
such that their com-
position N
1
⊕ N
2
⊕ . .. ⊕ N
i
≈ N
∗
(note that the oper-
ator ⊕ refers to a generic network aggregation oper-
ator, which details will be provided in Section 3.3).
Below, we will refer to an individual network N
i
as
dataset-specific network, whereas N
∗
will be referred
to as aggregated network. As anticipated in Section 1,
all these networks used as feature extractors share the
same task network.
3.1 Task Network
As shown in Figure 2, the task network is shared
across the aggregated and dataset-specific networks.
This network is parametrised by the set of weights θ:
the output provided by all of the N
i
and N
∗
is used as
input of the task network, and its output is the predic-
tion (i.e., softmax activation in case of classification).
The task network is trained with a task-specific
loss function as L
T
(z,y; w), that takes the training data
z (in form of representation) and target variables y as
inputs, and it is parametrised by a set of weights w
(that includes θ and the parameters of the feature ex-
tractors). We used cross-entropy loss for L
T
in this
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
644

paper. For other tasks (i.e., regression), a different
loss function may be used (e.g., mean squared error).
3.2 Dataset-specific Network
Each dataset-specific network N
i
acts as a feature ex-
tractor for the dataset it is trained on. We opted to
use a VGG-like network (Simonyan and Zisserman,
2015) in our experiments. In particular, following the
same architectural tweaks as others (Loh et al., 2021),
we used a VGG-16 network with Group Normalisa-
tion (Wu and He, 2018).
1
Each network N
i
is parametrised by the set of
weights ϕ
i
that is trained via standard supervised
learning. In fact, each N
i
is trained with a different
label dataset; all of those datasets maintain the same
underlying task. This means that each dataset D
i
con-
tains a set of input data X
i
, such that x
(i)
∈ X
i
, and a
set of target values Y
i
, such that y
(i)
∈ A (the set A
is a generic set defined by the task, i.e. if the task is
classification, A will contain all the possible classes).
For each of these networks, a specific loss func-
tion is used during training:
L
T
i
x
(i)
,y
(i)
;φ
i
∪ θ
= L
T
N
i
x
(i)
,y
(i)
;φ
i
∪ θ
.
(1)
3.3 Aggregated Network
The aggregated network is similar to the dataset-
specific networks: it shares the same architecture but
not the weights. In fact, this network is parametrised
by the set of weights φ
∗
.
The aggregated network is trained such that its
weights can be expressed as a sum of the dataset-
specific networks. To achieve this, we proposed the
aggregation regulariser. Each network N
i
is made
of L
i
layers, and each layer ` is parametrised by
some weights W
`
i
∈ϕ
i
.
2
Similarly, the aggregated net-
work N
∗
includes several layers L, each of those is
parametrised by W
`
. However, it is important to em-
phasise that all the feature extractors share the same
architecture, that is, L = L
1
= L
2
= .. . = L
n
.
During training, we want that:
W
`
= W
`
1
⊕ W
`
2
⊕ . . . ⊕ W
`
n
, (2)
1
We also tried either Batch Normalisation (Ioffe and
Szegedy, 2015) or no normalisation with no success.
2
Some types of layers, for example, convolutional lay-
ers, can be parametrised by multiple weights, such as ker-
nels and bias. For the sake of clarity, we incorporate these
weights within W
`
i
.
i.e., the weights at layer ` in the aggregated network
should be equal to the aggregation of the correspond-
ing layer weights in the dataset-specific networks.
We reformulate this constrain as a regulariser during
training. Assuming that is the inverse operator of
⊕, the aggregation regulariser is then expressed as:
L
agg
(Φ) =
L
∑
`=1
W
`
h
W
`
1
⊕ W
`
2
⊕ . . . ⊕ W
`
n
i
, (3)
where Φ = φ
∗
∪ (
S
n
i=1
φ
i
) is the set of all the weights
in all the feature extractors.
3
Although the networks
learn a non-linear mapping w.r.t the task, the aggrega-
tion regulariser in Equation (3) learns the weights Φ
such that the network aggregation can be performed
with a linear operation (assuming that ⊕ is linear).
The aggregated network takes all the input data
that are used for each dataset-specific network D =
S
n
i=1
D
i
and it is trained in a supervised manner w.r.t.
the task L
T
as follows:
L
T
∗
(x, y;φ
∗
∪ θ) = L
T
(N
∗
(x),y, φ
∗
∪ θ), (4)
where (x,y) ∈ D, i.e. inputs and labels are taken from
all the datasets used to train the dataset-specific net-
works.
3.4 Objective Function
As shown in Figure 2, the objective functions used to
train our model is the following:
J(x, y;Θ) = L
task
+ L
agg
, (5)
where Θ = Φ ∪ θ is the set of all the parameters in
the network. the loss function L
task
is given as the
sum of all the task-specific loss functions expressed
in Equation (1) and Equation (4):
L
task
(x, y;Θ) = L
T
∗
(x, y;φ
∗
∪ θ)
+
n
∑
i=1
L
T
i
x
(i)
,y
(i)
;φ
i
∪ θ
.
After training, there is no guarantee that the regu-
lariser in Equation (3) ensures that Equation (2) is sat-
isfied. However, the optimisation of Equation (5) will
make sure that W
`
≈ W
`
1
⊕ W
`
2
⊕ . . . ⊕ W
`
n
. Hence, we
can retrieve N
∗
by aggregating all the weights trained
for each dataset-specific network N
i
– we will refer to
this model as
ˆ
N
∗
, such that
ˆ
N
∗
≈ N
∗
.
3
Similarly as in (Geyer et al., 2019), we only aggregate
weights of convolutional layers.
Transfer Learning via Test-time Neural Networks Aggregation
645
We can selectively forget one of the datasets from
ˆ
N
∗
by applying a simple arithmetic operation. As-
suming that we wanted to remove the k-th dataset, we
can perform the operation
ˆ
N
∗
N
k
, without any fur-
ther training (or adaptation) steps.
3.5 Implementation Details
We set the number of datasets (and thus the number
of dataset-specific networks) to n = 2. This allowed
us to demonstrate whether our approach works and
to set a baseline. We set the number of groups for
Group Normalisation to 32. We used as aggregation
operator the sum for the following reasons: (i) it has
an inverse – the subtraction; (ii) it is differentiable.
We set as task-specific loss function the cross-entropy
loss as we train the whole network for a classification
task. Stochastic Gradient Descent (SGD) was used as
optimiser for training with a learning rate η = 0.01.
The baseline was trained for 20 epochs, while train-
ing of our proposed method lasted 200 epochs. We
implemented our approach in PyTorch (Paszke et al.,
2019) on Google Colaboratory.
4 EXPERIMENTAL RESULTS
Dataset. we used MNIST (LeCun et al., 2010) as
D
1
and SVHN format 2 (Netzer et al., 2011) as
D
2
. MNIST contains 60, 000 binary images of size
28 × 28 for training and 10,000 images for testing.
SVHN contains 73, 257 colour images of size 32× 32
for training and 26,032 for testing. We chose these
two datasets for the following reasons: (i) they are
designed for the same classification (10-class) task;
(ii) data are drawn from different distributions.
Preprocessing. In order to use the same architecture
for both datasets, MNIST images were rescaled to
32 × 32. We converted the SVHN images in binary
(grayscale). As for data augmentation, we performed
random horizontal flips with a probability of 50%.
Baseline. We compared our method with a standard
VGG-16 network with Batch Normalisation (Ioffe
and Szegedy, 2015). We ran the following baseline
experimentation:
1. trained it only on MNIST – following the nota-
tion adopted in this paper, we called this trained
network N
1
;
2. trained it only on SVHN – named N
2
;
3. trained it on both (N
∗
);
4. The weights trained on N
1
and N
2
were taken to
perform N
1
⊕ N
2
at test time.
Experimental results are shown in Table 1.
Table 1: Testing performance of the proposed method com-
pared to the baseline performance. D
1
indicates MNIST;
D
2
indicates SVHN. The models obtained via aggregation
(i.e., N
1
⊕ N
2
) are obtained at test time by aggregating the
weights of the networks.
Trained on Tested on
D
1
D
2
D
1
D
2
D
1
∪ D
2
Baseline
N
1
– 99.04% 8.67% 33.75%
N
2
– 57.63% 90.29% 80.78%
N
∗
98.73% 90.58% 92.85%
N
1
⊕ N
2
9.75% 7.59% 8.19%
Proposed Method
N
1
– 98.90% 41.45% 57.35%
N
2
– 45.30% 92.41% 79.31%
N
∗
98.40% 86.47% 89.77%
N
1
⊕ N
2
96.41% 68.03% 75.88%
4.1 Discussion
Our purpose is to demonstrate that the performance
of our aggregated network N
1
⊕ N
2
is better than the
baseline. Overall, our method achieves comparable
performance with the baseline for individual tasks
(i.e., N
1
and N
2
). However, there is a slight loss in per-
formance in N
∗
, that is, the network trained on both
MNIST and SVHN, with our method. The baseline
achieves approx. 92% accuracy, whereas N
∗
trained
with our method achieves approx. 89%.
Although this minor performance reduction, our
method achieves high performance with test-time
weight aggregation. After N
1
and N
2
are trained with
the baseline and our method, weights are aggregated
by applying the ⊕ operator. Table 1 clearly shows
that our training procedure outperforms the baseline
(8% vs 75% testing accuracy). This demonstrates that
a traditional training of two networks cannot be ag-
gregated, leading to catastrophic forgetting on both
datasets. Our training approach with Equation (3) en-
ables the networks to explicitly learn an aggregation
operation that can be reproduced at test time.
Ideally, the performance of N
1
⊕ N
2
should be as
close as possible to N
∗
. As shown in the last two lines
of Table 1, there is an approximate loss of 14% ac-
curacy. We hypothesise several reasons for this gap
in accuracy: (i) our method may require more train-
ing time; (ii) Group Normalisation may be having an
impact at test time (as specified in Section 3.3, we
only aggregate the weights of convolutional layers);
(iii) use of Weight Standardisation (WS) can improve
performance (Qiao et al., 2019; Loh et al., 2021).
In relation to training time, we plot the training
and validation accuracies and losses of our method
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
646

Figure 3: Training and validation accuracies and losses of our proposed method. (A) N
1
training and validation accuracies;
(B) N
2
training and validation accuracies; (C) Total training and validation loss.
Table 2: Commutativity and Selective forgetting testing re-
sults. The training is performed in both D
1
and D
2
. The
two datasets are the same as in Table 1. Highlighted rows
are copied from Table 1 to ease comparison.
D
1
D
2
D
1
∪ D
2
Commutativity
N
1
⊕ N
2
96.41% 68.03% 75.88%
N
2
⊕ N
1
96.41% 68.03% 75.88%
Selective forgetting
N
1
98.90% 41.45% 57.35%
(N
1
⊕ N
2
) N
2
98.55% 47.90% 61.92%
(N
2
⊕ N
1
) N
2
98.55% 47.90% 61.92%
N
2
45.30% 92.41% 79.31%
(N
1
⊕ N
2
) N
1
34.67% 90.88% 75.28%
(N
2
⊕ N
1
) N
1
34.67% 90.88% 75.28%
in Figure 3. Overall, it can be noted that 50 epochs
should be enough to accommodate for both datasets.
However, we found experimentally that more train-
ing time results in higher performances in our aggre-
gated model. We hypothesise that the optimisation of
Equation (3) could require more time to learn better
aggregable models. In relation to Weight Standardi-
sation, we posit that an increase in performance may
be achievable if the aggregation function is changed
to the mean instead of the sum. Otherwise, the aggre-
gated weights will no longer be zero-centred.
4.2 Commutativity
Here, we want to demonstrate whether our method
is commutative: does the performance of N
1
⊕ N
2
match the performance of N
2
⊕ N
1
? Theoretically,
commutativity should be strictly related to the ⊕ op-
erator. However, this is not exactly guaranteed in
our framework because we only aggregate the con-
volution weights in the networks N
i
(see Section 3.3).
Group Normalisation layers also include learnable pa-
rameters that are not included during network aggre-
gation. To confirm whether our method is commu-
tative, we also performed the operation N
2
⊕ N
1
and
results are reported in Table 2. It can be seen that the
performances in both scenarios are the same. Hence,
we can conclude that our approach is commutative.
4.3 Selective Forgetting
For the same reasons as in Section 4.2, we also exper-
imentally show whether selective forgetting is possi-
ble with our method. Because of Group Normalisa-
tion layers, (N
1
⊕ N
2
) N
1
≈ N
2
, i.e., by removing the
contribution of N
1
, we do not exactly obtain N
2
(and
vice versa). Therefore, we asked the following ques-
tion: does the network obtained by (N
1
⊕ N
2
) N
1
perform as good as N
2
? Table 2 shows the experi-
mental results of selective forgetting.
Forgetting SVHN. We removed the weights of N
2
from the aggregated networks (we considered N
1
⊕ N
2
and N
2
⊕ N
1
as aggregated networks), and we pro-
vided the SVHN testing set to this new network.
The testing accuracy is 47.90%, against the 41.45%
of N
1
. Therefore, the resulting network does forget
about SVHN, although not completely (there is ap-
prox +6% increase of performance).
Forgetting MNIST. A similar experiment was per-
formed by removing the weights of N
1
from the ag-
gregated networks. Differently than before, the test-
ing accuracy of the resulting network is 34.67%, com-
pared with 45.30%. This experimentally demon-
strates that our method has completely forgotten the
information learnt from the MNIST dataset.
Retained Information. In the two previous exper-
iments, it was shown that the resulting network had
forgotten information from either of the two datasets.
However, we must check whether the network can
still perform well in the other dataset. Overall, the
performance on MNIST dataset is very similar (from
98.90% to 98.55%), whereas in the case of SVHN
there is approx 2% loss of performance (from 92.41%
to 90.88%) – although the overall testing error is
above 90%. This also demonstrates that the proposed
Transfer Learning via Test-time Neural Networks Aggregation
647

method retains information from both tasks with a
loss in performance up to 2%.
5 CONCLUSIONS
In this paper, we proposed a novel and simple proof-
of-concept transfer learning approach that inherently
allows for selective forgetting. Our training method
enables for network aggregation at test time, i.e. the
weights of two networks (trained on two different
datasets) are aggregated together, such that the result-
ing network can work on both datasets without any
further training/adaptation step.
We achieve that by introducing an aggregation
regulariser, that enables the networks to also learn
the aggregation operation in an end-to-end training
framework. We used the sum as aggregation operator,
as it is invertible and differentiable. VGG-like archi-
tectures were used as feature extractors, using Group
Normalisation in lieu of Batch Normalisation.
Our experimental results demonstrated that the
proposed approach allows for test-time transfer learn-
ing without any further training steps. Furthermore,
we showed that our training procedure is commuta-
tive: the aggregated network N
1
⊕ N
2
obtains the same
performance of N
2
⊕ N
1
. Moreover, we demonstrated
that our method allows for selective forgetting (at the
cost of up to 2% testing performance).
The proposed method has some limitations: (i) it
requires that all the networks involved in the training
share the same architecture; (ii) the selective forget-
ting does not allow to forget a subset of the dataset;
(iii) we evaluated it on just two benchmark datasets
(although the proposed framework can easily accom-
modate for multiple datasets). As future work, we will
generalise our approach exploring the training with N
i
deep neural networks, for i = 1, ...,n, with n being the
number of datasets, in a federated learning scenario.
ACKNOWLEDGEMENTS
This work was funded by the Edinburgh Napier Uni-
versity internally funded project “Li.Ne.Co.”
REFERENCES
Chen, X., Wang, S., Fu, B., Long, M., and Wang, J. (2019).
Catastrophic forgetting meets negative transfer: Batch
spectral shrinkage for safe transfer learning. In Wal-
lach, H., Larochelle, H., Beygelzimer, A., d'Alch
´
e-
Buc, F., Fox, E., and Garnett, R., editors, Advances
in Neural Information Processing Systems 32, pages
1906–1916. Curran Associates, Inc.
Chen, Y., Qin, X., Wang, J., Yu, C., and Gao, W. (2020).
Fedhealth: A federated transfer learning framework
for wearable healthcare. IEEE Intelligent Systems,
35(4):83–93.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 248–255.
Geyer, R., Corinzia, L., and Wegmayr, V. (2019). Transfer
learning by adaptive merging of multiple models. In
Cardoso, M. J., Feragen, A., Glocker, B., Konukoglu,
E., Oguz, I., Unal, G., and Vercauteren, T., editors,
Proceedings of The 2nd International Conference on
Medical Imaging with Deep Learning, volume 102
of Proceedings of Machine Learning Research, pages
185–196. PMLR.
Golatkar, A., Achille, A., Ravichandran, A., Polito, M.,
and Soatto, S. (2021). Mixed-privacy forgetting in
deep networks. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 792–801.
Golatkar, A., Achille, A., and Soatto, S. (2020). Eternal
sunshine of the spotless net: Selective forgetting in
deep networks. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
Goodfellow, I. J., Mirza, M., Xiao, D., Courville, A., and
Bengio, Y. (2013). An empirical investigation of
catastrophic forgetting in gradient-based neural net-
works. arXiv preprint arXiv:1312.6211.
Han, X., Huang, Z., An, B., and Bai, J. (2021). Adaptive
transfer learning on graph neural networks.
Hinton, G., Vinyals, O., and Dean, J. (2015). Distilling
the knowledge in a neural network. arXiv preprint
arXiv:1503.02531.
Ioffe, S. and Szegedy, C. (2015). Batch normalization: Ac-
celerating deep network training by reducing internal
covariate shift. In International conference on ma-
chine learning, pages 448–456. PMLR.
LeCun, Y., Cortes, C., and Burges, C. (2010). Mnist hand-
written digit database. ATT Labs [Online]. Available:
http://yann.lecun.com/exdb/mnist, 2.
Lee, S.-W., Kim, J.-H., Jun, J., Ha, J.-W., and Zhang, B.-
T. (2017). Overcoming catastrophic forgetting by in-
cremental moment matching. In 31st Conference on
Neural Information Processing Systems (NIPS 2017),
Long Beach, CA, USA.
Litrico, M., Battiato, S., Tsaftaris, S. A., and Giuffrida,
M. V. (2021). Semi-supervised domain adaptation for
holistic counting under label gap. Journal of Imaging,
7(10).
Loh, A., Karthikesalingam, A., Mustafa, B., Freyberg, J.,
Houlsby, N., MacWilliams, P., Natarajan, V., Wilson,
M., McKinney, S. M., Sieniek, M., Winkens, J., Liu,
Y., Bui, P., Prabhakara, S., and Telang, U. (2021). Su-
pervised transfer learning at scale for medical imag-
ing.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
648

Netzer, Y., Wang, T., Coates, A., Bissacco, A., Wu, B., and
Ng, A. Y. (2011). Reading digits in natural images
with unsupervised feature learning. In NIPS Workshop
on Deep Learning and Unsupervised Feature Learn-
ing 2011.
Oquab, M., Bottou, L., Laptev, I., and Sivic, J. (2014).
Learning and transferring mid-level image represen-
tations using convolutional neural networks. In Pro-
ceedings of the IEEE conference on computer vision
and pattern recognition, page pages 1717–1724.
Pan, S. J. and Yang, Q. (2010). A survey on transfer learn-
ing. IEEE Transactions on Knowledge and Data En-
gineering, 22.
Parisi, G. I., Kemker, R., Part, J. L., Kanan, C., and
Wermter, S. (2019). Continual lifelong learning with
neural networks: A review. Neural Networks, 113:54–
71.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., Desmaison, A., Kopf, A., Yang, E., De-
Vito, Z., Raison, M., Tejani, A., Chilamkurthy, S.,
Steiner, B., Fang, L., Bai, J., and Chintala, S. (2019).
Pytorch: An imperative style, high-performance deep
learning library. In Advances in Neural Information
Processing Systems 32, pages 8024–8035. Curran As-
sociates, Inc.
Qiao, S., Wang, H., Liu, C., Shen, W., and Yuille, A. (2019).
Micro-batch training with batch-channel normaliza-
tion and weight standardization.
Ramapuram, J., Gregorova, M., and Kalousis, A. (2020).
Lifelong generative modeling. Neurocomputing,
404:381–400.
Rao, D., Visin, F., Rusu, A. A., Teh, Y. W., Pascanu, R., and
Hadsell, R. (2019). Continual unsupervised represen-
tation learning. arXiv preprint arXiv:1910.14481.
Reyes, A. K., Caicedo, J. C., and Camargo, J. E. (2015).
Fine-tuning deep convolutional networks for plant
recognition. CLEF (Working Notes), 1391:467–475.
Rosenstein, M. T., Marx, Z., Kaelbling, L. P., and Diet-
terich, T. G. (2005). To transfer or not to transfer. In
In NIPS’05 Workshop, Inductive Transfer: 10 Years
Later.
Sch
¨
olkopf, B., Platt, J., and Hofmann, T. (2007). Correcting
Sample Selection Bias by Unlabeled Data, pages 601–
608.
Shu, Y., Kou, Z., Cao, Z., Wang, J., and Long, M. (2021).
Zoo-tuning: Adaptive transfer from a zoo of models.
In Meila, M. and Zhang, T., editors, Proceedings of
the 38th International Conference on Machine Learn-
ing, volume 139 of Proceedings of Machine Learning
Research, pages 9626–9637. PMLR.
Simonyan, K. and Zisserman, A. (2015). Very deep con-
volutional networks for large-scale image recognition.
ICLR 2015.
Tommasi, T., Orabona, F., and Caputo, B. (2010). Safety
in numbers: Learning categories from few examples
with multi model knowledge transfer. In roceedings of
IEEE Computer Vision and Pattern Recognition Con-
ference.
Torrey, L. and Shavlik, J. (2010). Transfer learning. Hand-
book of Research on Machine Learning Applications
and Trends.
Tzeng, E., Hoffman, J., Saenko, K., and Darrell, T. (2017).
Adversarial discriminative domain adaptation. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition (CVPR).
Wang, Z., Dai, Z., P
´
oczos, B., and Carbonell, J. (2018).
Characterizing and avoiding negative transfer.
Weiss, K., Khoshgoftaar, T. M., and Wang, D. (2016).
A survey of transfer learning. Journal of Big data,
3(1):1–40.
Wu, Y. and He, K. (2018). Group normalization. In Pro-
ceedings of the European conference on computer vi-
sion (ECCV), pages 3–19.
Ye, F. and Bors, A. G. (2020). Learning latent representa-
tions across multiple data domains using lifelong vae-
gan. In Vedaldi, A., Bischof, H., Brox, T., and Frahm,
J.-M., editors, Computer Vision – ECCV 2020, pages
777–795, Cham. Springer International Publishing.
Zhao, S., Yue, X., Zhang, S., Li, B., Zhao, H., Wu, B.,
Krishna, R., Gonzalez, J. E., Sangiovanni-Vincentelli,
A. L., Seshia, S. A., et al. (2020). A review of single-
source deep unsupervised visual domain adaptation.
IEEE Transactions on Neural Networks and Learning
Systems.
Zhuang, F., Qi, Z., Duan, K., Xi, D., Zhu, Y., Zhu, H.,
Xiong, H., and He, Q. (2021). A comprehensive sur-
vey on transfer learning. Proceedings of the IEEE,
109(1):43–76.
Transfer Learning via Test-time Neural Networks Aggregation
649
