
Reinforced Damage Minimization in Critical Events for Self-driving
Vehicles
Francesco Merola, Fabrizio Falchi, Claudio Gennaro and Marco Di Benedetto
Institute of Information Science and Technologies “Alessandro Faedo” (ISTI),
National Research Council (CNR), Pisa (PI), Italy
Keywords:
Autonomous Driving, Reinforcement Learning, Critical Scenarios, Deep Learning, Double Deep Q-learning,
Vision based.
Abstract:
Self-driving systems have recently received massive attention in both academic and industrial contexts, leading
to major improvements in standard navigation scenarios typically identified as well-maintained urban routes.
Critical events like road accidents or unexpected obstacles, however, require the execution of specific emer-
gency actions that deviate from the ordinary driving behavior and are therefore harder to incorporate in the
system. In this context, we propose a system that is specifically built to take control of the vehicle and per-
form an emergency maneuver in case of a dangerous scenario. The presented architecture is based on a deep
reinforcement learning algorithm, trained in a simulated environment and using raw sensory data as input. We
evaluate the system’s performance on several typical pre-accident scenario and show promising results, with
the vehicle being able to consistently perform an avoidance maneuver to nullify or minimize the incoming
damage.
1 INTRODUCTION
In the last few years, research towards fully au-
tonomous driving techniques has received massive
attention and investments from both academic com-
munities and private companies. Promises of life-
changing safety and ease have been hung on these
techniques, as self-driving vehicles have the potential
to drastically change mobility and transport.
Significant progress has already been made and
several studies (Urmson et al., 2008) (Levinson et al.,
2011) (Broggi et al., 2013) (Kendall et al., 2019) have
demonstrated that it is possible to successfully au-
tomate key driving tasks such as following the road
and maintaining distance from other vehicles in nor-
mal circumstances. Critical situations, however, have
shown to be particularly hard to handle and there-
fore currently constitute one of the main obstacles to-
wards the realization of a fully autonomous driving
system. These would include adverse weather scenar-
ios with low visibility, intricate road topologies and
traffic, sudden and unexpected obstacles and so on.
The issue derives from the fundamental differences
between the optimal behavior in normal operations
and in critical events. In the latter case, the system
is asked to perform an emergency action that often
breaks the rules of ordinary driving. Steering into an
empty sidewalk, for example, may be considered ac-
ceptable if it is needed to avoid a crash. Despite being
rare, these events are crucial for the safeness on the
road and potentially represent the point where an au-
tomated system could bring the most improvements
with respect to an human driver, which makes them
very worth of interest.
Given these premises, this work aims to investi-
gate and propose a solution to address critical pre-
accident scenarios. Starting from the assumption that
the vehicle is already able to handle ordinary opera-
tions, the focus is put on learning to correctly navigate
sudden dangerous situations. The proposed system is
based on an end-to-end design trained with reinforce-
ment learning (see Figure 1). Briefly, by using a sim-
ulated environment, the system learns to map sensory
data coming from an RGB camera to vehicle actions
directly by interacting with the virtual world in a trial-
and-error fashion. The model updates are driven by a
user defined reward that is designed to encourage cor-
rect decisions while punishing the wrong ones.
The remaining parts of this paper are organized as
follows: Section 2 discusses some of the most impor-
tant works related to the autonomous driving field; in
Section 3 we present the architecture of the proposed
system and the learning algorithm; Section 4 contains
the experimental methodology used to test the system
258
Merola, F., Falchi, F., Gennaro, C. and Di Benedetto, M.
Reinforced Damage Minimization in Critical Events for Self-driving Vehicles.
DOI: 10.5220/0010908000003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
258-266
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

as well as the achieved results; finally, the paper draws
the conclusions in Section 5 with some future direc-
tives.
Figure 1: Learning algorithm used to optimize the critical
event driving policy. At each step, the latest 4 frames gath-
ered by the camera are subjected to feature extraction and
then fed into the RL algorithm. The DQN produces the val-
ues associated with each action, then the best one is selected
and applied. The resulting reward is used to compute the
loss and update the weights of our custom feed-forward NN
(represented by the dotted line).
2 RELATED WORK
Existing approaches usually tackle the autonomous
driving problem from a general prospective and very
few take into account critical events, which thus re-
mains an open problem. That being said, most of the
works in the current literature can be categorised as
either modular pipelines or end-to-end.
Modular Pipelines. The modular design represents
the standard for autonomous driving, and is based
on the idea of breaking down the complex mapping
function from high dimensional inputs to vehicle con-
trol variables into independent modules that can be
worked on separately. Some examples of this ap-
proach would include Boss from CMU (Urmson et al.,
2008), Junior from Stanford (Levinson et al., 2011)
and BRAiVE from University of Parma (Broggi et al.,
2013). Their designs are all based on the typical
modular pipeline, composed by the perception mod-
ule, followed by scene prediction, planning and, fi-
nally, by the control module, responsible for gener-
ating motor commands. The environment sensing is
generally carried out by some combination of cam-
eras, radars, LiDARs and ultrasonic sensors, while
computer vision tasks such as semantic segmenta-
tion (Badrinarayanan et al., 2017) and object detec-
tion (Gonz
´
alez et al., 2016) enable the vehicle to un-
derstand the scene. A recent work that is particularly
relevant to this paper is the one by Vitelli et al. (Vitelli
et al., 2021) that combines a machine learning plan-
ner with a rule-based fallback layer to safely tackle
critical driving scenarios.
Supported by benchmark datasets (Geiger et al.,
2012) (Maddern et al., 2017), this kind of approach
has achieved good results and shown some clear ad-
vantages, such as the possibility of exploiting past
knowledge for the construction of each module and
the interpretability offered by the separate output of
each of them. On the other hand, auxiliary loss func-
tions are required to optimize each module separately,
which poses a considerable complexity challenge and
introduces the problem of error propagation (McAl-
lister et al., 2017).
End-to-End Designs. An alternative approach,
commonly referred to as end-to-end, has gained pop-
ularity in recent time: aimed at combining the tasks of
perception, planning and control into a single model,
a deep neural network is trained end-to-end on the
whole process. This way, all the parameters can be
directly optimized with respect to a joint end goal,
significantly reducing complexity. A solution leads
to use imitation learning (Bojarski et al., 2016) (Xu
et al., 2017), which is a supervised approach where
the model learns to replicate the behaviour of an ex-
pert. Imitation learning, however, suffers from over-
fitting (i.e., a modelling error that aligns the function
being modelled too close to the training exemplars)
and is difficult to scale, since collecting expert data
that covers all the possible scenarios is practically im-
possible. Because of this, at test time, the vehicle
is likely to encounter new situations it has not been
trained for and therefore failing to act in a proper way.
An alternative to the above solutions is reinforce-
ment learning (RL), a technique that lets the vehi-
cle learn directly by interacting with the environment
with the goal of maximizing a specific user defined
reward (Sutton and Barto, 2020) (see Section 3.1).
Reinforced Damage Minimization in Critical Events for Self-driving Vehicles
259

Reinforcement learning has shown the ability to
reach super-human performances in board games
such as Gammon (Tesauro, 1995) and Go (Silver
et al., 2017), as well as computer games (Mnih et al.,
2015). The paradigm has also seen its first success-
ful applications in the autonomous driving field, such
as Sallab et al. (Sallab et al., 2017) and Kendall et
al. (Kendall et al., 2019) works that are the closest to
this paper and represented a major source of inspira-
tion.
RL’s biggest flaw is the need for an online train-
ing, meaning that the agent has to operate in the envi-
ronment during the learning process, when the behav-
ioral policy is not yet optimized. This implies that,
in most real world applications, including this work,
the training must be carried out with the aid of a sim-
ulator, which in turn introduces the need for an ad-
ditional fine-tuning step to transfer the system from
virtual to real environment. Despite these issues, RL
is an extremely general and flexible framework, and
we believe that these characteristics make for a useful
tool to apply to critical driving events.
3 SYSTEM ARCHITECTURE
The system is built with the specific aim of handling
pre-accident scenarios and assumes the existence of a
base model that is able to drive in ordinary circum-
stances. Moreover, our proposal would ideally work
in conjunction with a classificator module, in charge
of discerning those scenarios that require emergency
actions from those that don’t (see Section 5). That
said, by using RL as our methodology, the attention
is placed on the optimization of avoidance maneuvers
in order to minimize damage.
3.1 Driving as an MDP
In a RL approach, the problem is shaped as a Markov
Decision Process (MDP) (Sutton and Barto, 2020)
consisting of:
• a set of states S
• a set of actions A
• a transition function T : S × A × S → [0, 1] that
defines the probability of landing in a particular
state s
0
at time t, given the state-action pair (s, a)
at time t-1, for each s
0
∈ S
• a reward function R : S × S ×A → R that defines
the reward R(s, a, s
0
) for each possible triple state
s, action a, next-state s
0
• a discount factor γ ∈ [0, 1] that regulates the
weight of future rewards based on their distance
in terms of time
The learner (and executor) is called agent, and the so-
lution is represented by a policy π : S ×A → [0, 1] that
associates to every state-action pair (s, a) the proba-
bility of action a being selected from state s in or-
der to maximize the obtained reward. RL is a broad
paradigm that encompasses many algorithms, but this
work focuses on Q-learning (Watkins and Dayan,
1992), which defines the Q-function as the objective
to maximize:
Q
π
(s, a) = E
π
"
∞
∑
k=0
γ
k
R
t+k+1
|S
t
= s, A
t
= a
#
(1)
In other words, the aim is to learn a policy π that max-
imizes the expected cumulative reward over an arbi-
trarily long time horizon, that can either be finite or in-
finite. In this paper we structure the task in episodes,
which corresponds to having a finite time horizon.
For our self-driving scenario, we are then required
to define a state space S, an action space A and a
reward function R. Given those three components,
the transition function is automatically fixed by the
mechanics of the used simulator.
State Space. The state space defines the type of in-
formation that the reinforcement learning agent re-
ceives at each time step about the environment. The
first consideration to make concerns how to sense the
environment. This work opts for the most straight-
forward route by solely relying on vision, just like
humans do, to keep the approach simple. Moreover,
cameras are relatively cheap and most vehicles have
at least one on board, which makes the proposed sys-
tem’s setup cost very low. The data is hence pro-
vided by a single RGB camera, placed just above the
windscreen. Because of the Markov property, future
states should only be dependent on the present and
not on the past. This means that, theoretically, every
state should be a Markov representation of all previ-
ous observations. With this in mind, using a single
image to describe the current environment state may
be too much of an oversimplification: even a human
would have trouble basing his decisions on a single
RGB frame, as that would not provide enough infor-
mation to determine direction, speed and steering an-
gles of the agent and every other moving object in the
scene. For this reason, the sequence of the most recent
4 frames is included in each environment observation.
The second consideration regards how to process
the input image. Compressed representations are usu-
ally preferable (M
¨
uller et al., 2018), (Kendall et al.,
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
260

2019), therefore we use a residual neural network
(ResNet) (He et al., 2016), pre-trained on the Ima-
geNet dataset (Deng et al., 2009), as a feature extrac-
tor for each of the 4 frames. Directly extracting the
highest level features, however, results in poor per-
formance due to the aggressive pooling operated by
the ResNet, which eliminates a lot of spatial informa-
tion in favour of a classification oriented latent space.
We therefore choose to extract features just before the
pooling layer and then perform dimensionality reduc-
tion by means of a 1x1 convolutional layer trained for
our driving task.
Action Space. The most important actions in the
driving context are throttle, brake and steer. The re-
inforcement learning algorithm we use (see Section
3.2) requires the action space to be finite, therefore
we opt for a two-dimensional discrete action space,
dedicating one dimension to throttle/brake and one di-
mension to steer. This way, at each time step, the ac-
tion can be represented as a
t
= (acc
t
, steer
t
), where
acc
t
∈ {Br ake, DoNothing, T hrottle} and steer
t
∈
{SteerLe f t, GoStraight, SteerRight}. This ultimately
results in 9 possible actions to choose from.
Reward Function. The reward function is critical
as it drives the agent behavior evolution and should
be carefully designed to encourage correct decisions
while punishing the wrong ones. The first step is
to clarify the behavior that the vehicle should learn
which, in our case, can be summarized as ”perform
a quick emergency maneuver to minimize damage in
the current critical event”. With this in mind, we pro-
pose a reward structure based on several different fac-
tors.
The main factor is collision damage: the agent is
heavily punished for colliding with an object. More
precisely, every impact produces a negative reward
with magnitude proportional to its intensity. This en-
courages the agent to avoid collisions as much as pos-
sible while also providing a feedback in those cases
where complete damage nullification is not achiev-
able, favouring mild impacts over strong ones.
Despite crash damage being undoubtedly the most
important element in the evaluation of a road accident,
a reward function solely based on it would be sparse,
even more so as the system’s performance improves
and collisions get rarer. For this reason, we include
other minor factors in the reward structure, with the
aim of providing a stable signal to the agent and re-
inforcing a more comprehensive behavior. Covered
distance, speed control and road following all fill this
role. We therefore reward the agent for each meter
traveled and punish it for braking when the speed is
below a certain threshold v
min
, throttling when speed
is above a second threshold v
max
, and steering in a
way that widens the angle φ between its traveling di-
rection and the road direction, as long as |φ| is greater
than a certain steering margin φ
max
(see Figure 2).
Figure 2: Angle φ between agent vehicle moving direction
and road direction. While |φ| is greater than φ
max
, steering
towards the direction that further increases the angle results
in a penalty.
3.2 Algorithm Choice: Deep Q-learning
For training we used our implementation of Deep Q-
Learning (Mnih et al., 2013), one of the most popular
reinforcement learning algorithms for discrete state
spaces. Deep Q-learning is based on standard Q-
learning (Watkins and Dayan, 1992), a model-free al-
gorithm that aims at estimating the action-value func-
tion Q(a, s) through a series of iterative updates based
on the Bellman equation:
Q
∗
(s, a) = E[R
t+1
+ γ max
a
0
Q
∗
(s
0
, a
0
)] (2)
Where Q
∗
(s, a) is the value that the Q-function as-
sumes under the optimal policy. Thanks to its recur-
sive form, such equation provides a simple way to de-
fine a loss function with respect to a set of parameters
θ, that can be approximated using a neural network
(Deep Q-Network, DQN):
L(θ) = [R + γmax
a
0
Q
∗
(s
0
, a
0
;θ) − Q(s, a; θ)]
2
(3)
Minimizing L(θ) is the objective of Deep Q-Learning.
Many implementations improve upon this basic
version of the algorithm by incorporating some ex-
tensions. We use two of the most famous, namely ex-
perience replay and target networks, that are known
to bring substantial performance gains (Mnih et al.,
2015). Experience replay is a technique that lets the
agent store its experiences in a buffer, called replay
memory. The experience at a certain time step t is a tu-
ple, e
t
= (s
t
, a
t
, r
t+1
, s
t+1
), containing the state at time
t, the action taken by the agent, the reward obtained at
the following time step and the following state. The
network is then trained by sampling batches of data
from the buffer at each time step in order to increase
data efficiency and break the correlation between con-
secutive samples (Lin, 1992). The target network, in-
stead, is a second network, with weights θ
0
, that gets
Reinforced Damage Minimization in Critical Events for Self-driving Vehicles
261

updated with a certain delay with respect to the first
one and is used to compute the value of Q
∗
(s
0
, a
0
) in-
side the loss function:
L(θ) = [R+γQ
∗
(s
0
, max
a
0
Q
∗
(s
0
, a
0
;θ); θ
0
)−Q(s, a; θ)]
2
(4)
This effectively decouples target selection and eval-
uation, reducing the maximization bias typical of
Deep Q-learning while also granting increased stabil-
ity thanks to the delayed weights updates (He et al.,
2016).
3.3 Training Architecture
The training process is illustrated in Figure 1. First,
the vision data, composed by the 4 more recent frames
provided by an RGB camera, is subjected to feature
extraction by means of a pre-trained ResNet (in our
case a ResNet18), gaining thus efficiency on a well-
investigated architecture. The data flow is then in-
tercepted before entering the average pooling layer
(which would remove feature positional information),
gathering then a latent space representation with di-
mension 7x7x512 for each input image, which is then
concatenated with the previous other three on a final
state vector of dimension 14x14x512. Such vector
constitutes the input part of our custom feed-forward
neural network (represented by the dotted rectangle in
the figure), which is composed by a 1x1 convolutional
layer used for dimensionality reduction, followed by
4 fully connected layers. The 1x1 convolution has 512
input and 16 output channels, resulting in a 14x14x16
representation. The encoded state is flattened before
entering the linear layers, with hidden size equal to
256. This process outputs an estimate of the value re-
lated to each one of the possible actions. The action
with the maximum output value is then selected and
applied to the agent vehicle in the simulated environ-
ment. Finally, the simulation advances by one step
producing a reward and a new RGB frame. The latter
replaces the oldest of the previous frames and is then
used to craft the following state vector. The reward,
instead, is fed into the computation of the loss, which
gets backpropagated to update the DQN’s weights by
means of gradient descent. Note that, despite be-
ing partly pre-trained, the DQN is a single model in
charge of performing direct mapping from raw sen-
sory data to vehicle actions. It is in this sense that we
refer to our system as an end-to-end architecture.
Although the process is relatively simple, it is
worth making some clarifications. First, the algorithm
makes use of a replay buffer (see Section 3.2). This
implies that the loss computation and weight update
steps are performed by sampling mini batches of tran-
sitions from said buffer. Secondly, the training is done
off-policy, meaning that actions performed during the
learning phase come from a policy different from the
one being optimized. This happens in order to widen
the explored state-action distribution as much as pos-
sible, thus increasing robustness. There are several
exploration strategies that can be used to achieve this
(Tijsma et al., 2016). We opted for ε-greedy, which
consists introducing a probability ε of selecting a ran-
dom action instead of the best one.
4 EXPERIMENTS
We conduct our experiments in CARLA, an open
urban-driving simulator specifically built to support
development and validation of self-driving models
(Dosovitskiy et al., 2017).
The experiments were structured into episodes of
60 time steps length, with 1 step being 0.1 simulated
seconds long. This has two important implications.
First, it means that the agent can act 10 times per sec-
ond. Reducing the time step length would increase
the responsiveness but also affect the computational
load. We found the value 0.1 to be low enough for
the agent to comfortably handle the critical scenarios,
simultaneously keeping the load under control. The
second implication concerns the total episode length
in terms of simulated time, which is 6 seconds. We
chose the smallest value that allows to fully solve all
of the proposed scenarios when acting properly, in or-
der to favour training efficiency in the system’s target
use case, i.e. critical driving events.
Pre-accident Scenarios. The system’s perfor-
mance is evaluated on three different typical
pre-accident scenarios, shown in Figure 3. Situation
(a) represents one of the most common pre-crash
scenario involving two vehicles: the leading car
suddenly brakes and the following one (the agent,
in our case) must quickly react by either braking
itself or performing a lane change to avoid colli-
sions. Scenario (b) is also modeled after a relatively
common occurrence. In this case the agent has to
adjust its behavior to avoid crashing with a vehicle
that suddenly crosses an unsignalized intersection at
high speed. Finally, scenario (c) is more of a limit
case, where the agent must react to a second vehicle,
coming from the opposite direction, that suddenly
loses control and invades the lane.
Note that in all of the above, the damage mini-
mization’s task difficulty changes depending on the
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
262

distance between the two vehicles, their speed, and
the suddenness of the second vehicle’s actions.
Figure 3: Scenarios used to evaluate the system, the agent
is represented by the blue car. In scenario (a) the agent must
avoid the preceding vehicle that suddenly brakes. Scenario
(b) involves prevention of a crash at an intersection. In sce-
nario (c) a vehicle loses control and invades the agent’s lane,
requiring a quick avoidance maneuver.
Training Methodology. For our experiments we
chose to use one of the pre-built urban worlds (named
town03) offered by CARLA. This is relevant, despite
the episodes being short, as urban scenes are gener-
ally more cluttered with buildings and environmental
objects than highway or rural ones.
We set the same probability for each scenario to
appear and vary the agent’s spawn location by ran-
domly selecting among 5 different points in the simu-
lated world, 3 of them being a rectilinear and 2 an in-
tersection. Both vehicle’s starting speed is randomly
selected in the range 30-60 Km/h.
In terms of hyperparameters, we found the fol-
lowing configuration to be the most effective through
preliminary testing carried out on a simplified sce-
nario: slowly decaying learning rate in the range
[10
−4
, 10
−6
], discount factor of 0.99, target network
update interval of 5000 steps and batch size 64.
The reward structure is described in Section 3.1,
but it is important to note that the weight of each cat-
egory is not the same. We found collision damage
and speed control to be the most relevant elements in
the agent’s behavior shaping. Therefore, we set the
magnitude to be 1 for steering actions (road follow-
ing) and distance covered, and 5 for actions related
to speed. The collision damage penalty, on the other
hand, fluctuates between 1 and 100 depending on the
impact intensity. Given the way we set up the reward
signal, with high emphasis on discouraging wrong
decisions, a negative sign is to be expected in most
episodes and values approaching 0 can be considered
good.
4.1 Results and Discussion
The training results are shown (Figure 4). The graph
shows a constant improvement roughly until episode
6000, where the reward stabilizes with slight fluctua-
tions at around -10. These results correspond to the
agent being able to avoid collisions in almost every
situation, with rare mild impacts in some of the most
challenging ones. The system was capable of adopt-
ing the optimal behavior in each of the three proposed
scenarios, correctly handling their internal variations
as well (performing a more or less abrupt maneuver
depending on the danger level, for example). This
is particularly important as the experimental scenar-
ios are fundamentally different from one another and
therefore require non-trivial adaptation capabilities to
be solved. Figure 5 shows an example of the agent
vehicle’s performance in all three critical scenarios.
Figure 4: Experiments results - training graph reporting the
average reward over the past 100 episodes. The average
reward stabilizes at a value of around -10, corresponding to
a good performance level in terms of collision avoidance.
Reinforced Damage Minimization in Critical Events for Self-driving Vehicles
263
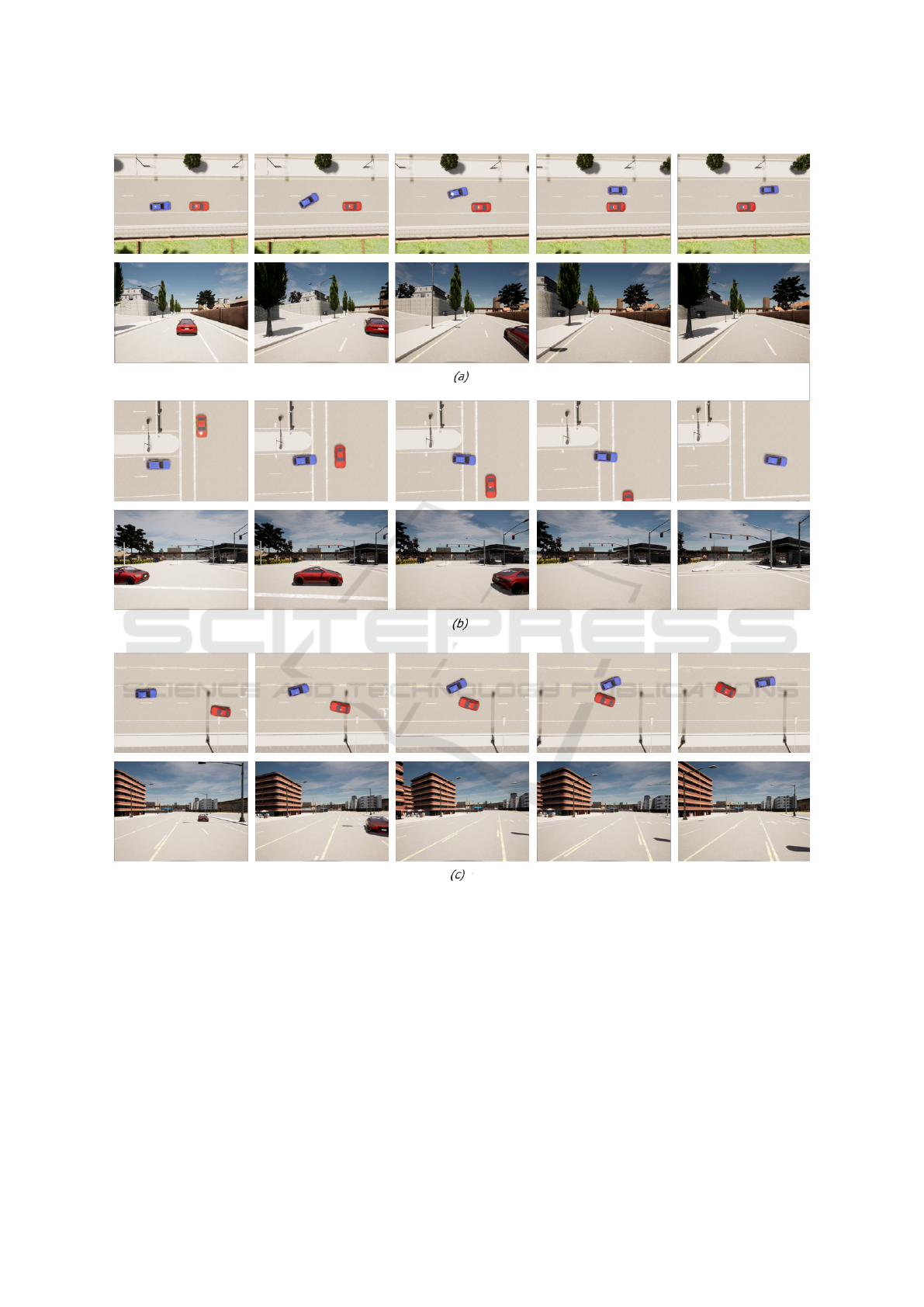
Figure 5: Three frame sequences illustrating the agent performance in the different critical scenarios. Each sequence shows
two points of view: bird’s eye view (above) and agent’s camera (below), with time increasing left to right. In the first sequence
the agent avoids the leading car that suddenly brakes. The second shows the agent braking at an intersection to let a second
vehicle pass, then driving forward. In the last sequence, the agent performs a quick steering maneuver to avoid a vehicle that
is invading the lane.
On the negative side, despite its correctness, the
learned policy was a bit jerky at times, probably due to
the discrete and rather small action space. This did not
affect the system’s ability to correctly read and adapt
to different critical events, but it is worth noting as
something to potentially improve upon in the future.
Although the agent’s performance is still not suitable
for actual real world applications, the conducted ex-
periments provided some interesting insights about
the potential of the followed approach. The major
finding is that reinforcement learning is able to solve
the critical driving tasks in a relatively short time, as
6000 episodes took around 5 hours to complete on our
system, equipped with a very affordable GPU (GTX
1060 6GB). The fact that the model was able to learn
how to manage all the different training scenarios is
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
264

encouraging and confirms the generalization poten-
tial that RL offers as a framework, even when using a
relatively simple off-the-shelf algorithm. We believe
these factors suggest that reinforcement learning ap-
proaches to critical driving events deserve further in-
vestigations.
5 CONCLUSIONS AND FUTURE
WORK
This paper proposes a deep reinforcement learning
approach for self-driving in pre-accident scenarios,
with the aim of investigating its effectiveness and
safeness specifically in critical circumstances, when
damage minimization should be the only priority.
The control system is based on an end-to-end de-
sign that directly maps raw sensory data, coming from
a single RGB camera, to vehicle commands. The im-
ages gathered by the camera are subjected to feature
extraction by means of a pre-trained ResNet and then
fed into the RL algorithm for the learning process
that takes place in a virtual environment. Model up-
dates are driven by an hand-crafted reward function,
specifically designed to encourage emergency maneu-
vers in critical situations, taking into account colli-
sion damage and other minor factors, namely speed
control, road following and covered distance. Experi-
ments were carried out on several typical pre-accident
scenario recreated in the CARLA simulated world,
where the autonomous vehicle showed promising per-
formance, managing, in the vast majority of cases, to
avoid collisions with the other vehicle in the scene.
Despite these encouraging results, the work leaves
room for future improvements. First, as previously
stated, our model is designed to be embedded in a
broader system involving a module that takes care of
driving in ordinary circumstances. To this aim, a neu-
ral network could be trained to identify critical scenar-
ios and act as a switch between the two driving sys-
tems, passing the control to the emergency one when
danger is detected.
Furthermore, the use of a more advanced rein-
forcement learning algorithm is also worth consider-
ing. Algorithms like Deep Deterministic Policy Gra-
dient (DDPG) (Lillicrap et al., 2015) or Soft Actor-
Critic (SAC) (Haarnoja et al., 2018) have recently
shown good performances and their ability to deal
with continuous action spaces could favour a more ac-
curate and smooth driving style.
ACKNOWLEDGEMENTS
This work was partially funded by the H2020 project
AI4Media “A European Excellence Centre for Media,
Society and Democracy” under GA 951911.
REFERENCES
Badrinarayanan, V., Kendall, A., and Cipolla, R. (2017).
Segnet: A deep convolutional encoder-decoder ar-
chitecture for image segmentation. IEEE transac-
tions on pattern analysis and machine intelligence,
39(12):2481–2495.
Bojarski, M., Del Testa, D., Dworakowski, D., Firner,
B., Flepp, B., Goyal, P., Jackel, L. D., Monfort,
M., Muller, U., Zhang, J., et al. (2016). End to
end learning for self-driving cars. arXiv preprint
arXiv:1604.07316.
Broggi, A., Buzzoni, M., Debattisti, S., Grisleri, P., Laghi,
M. C., Medici, P., and Versari, P. (2013). Exten-
sive tests of autonomous driving technologies. IEEE
Transactions on Intelligent Transportation Systems,
14(3):1403–1415.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). Carla: An open urban driving sim-
ulator. In Conference on robot learning, pages 1–16.
PMLR.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In 2012 IEEE conference on computer vision
and pattern recognition, pages 3354–3361. IEEE.
Gonz
´
alez, A., V
´
azquez, D., L
´
opez, A. M., and Amores, J.
(2016). On-board object detection: Multicue, multi-
modal, and multiview random forest of local experts.
IEEE transactions on cybernetics, 47(11):3980–3990.
Haarnoja, T., Zhou, A., Abbeel, P., and Levine, S. (2018).
Soft actor-critic: Off-policy maximum entropy deep
reinforcement learning with a stochastic actor. In
International conference on machine learning, pages
1861–1870. PMLR.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Kendall, A., Hawke, J., Janz, D., Mazur, P., Reda, D., Allen,
J.-M., Lam, V.-D., Bewley, A., and Shah, A. (2019).
Learning to drive in a day. In 2019 International Con-
ference on Robotics and Automation (ICRA), pages
8248–8254. IEEE.
Levinson, J., Askeland, J., Becker, J., Dolson, J., Held, D.,
Kammel, S., Kolter, J. Z., Langer, D., Pink, O., Pratt,
V., et al. (2011). Towards fully autonomous driving:
Reinforced Damage Minimization in Critical Events for Self-driving Vehicles
265

Systems and algorithms. In 2011 IEEE Intelligent Ve-
hicles Symposium (IV), pages 163–168. IEEE.
Lillicrap, T. P., Hunt, J. J., Pritzel, A., Heess, N., Erez, T.,
Tassa, Y., Silver, D., and Wierstra, D. (2015). Contin-
uous control with deep reinforcement learning. arXiv
preprint arXiv:1509.02971.
Lin, L.-J. (1992). Reinforcement learning for robots using
neural networks. Carnegie Mellon University.
Maddern, W., Pascoe, G., Linegar, C., and Newman, P.
(2017). 1 year, 1000 km: The oxford robotcar
dataset. The International Journal of Robotics Re-
search, 36(1):3–15.
McAllister, R., Gal, Y., Kendall, A., Van Der Wilk, M.,
Shah, A., Cipolla, R., and Weller, A. (2017). Concrete
problems for autonomous vehicle safety: Advantages
of bayesian deep learning. International Joint Confer-
ences on Artificial Intelligence, Inc.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing atari with deep reinforcement learn-
ing. arXiv preprint arXiv:1312.5602.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Ve-
ness, J., Bellemare, M. G., Graves, A., Riedmiller, M.,
Fidjeland, A. K., Ostrovski, G., et al. (2015). Human-
level control through deep reinforcement learning. na-
ture, 518(7540):529–533.
M
¨
uller, M., Dosovitskiy, A., Ghanem, B., and Koltun, V.
(2018). Driving policy transfer via modularity and ab-
straction. arXiv preprint arXiv:1804.09364.
Sallab, A. E., Abdou, M., Perot, E., and Yogamani,
S. (2017). Deep reinforcement learning frame-
work for autonomous driving. Electronic Imaging,
2017(19):70–76.
Silver, D., Schrittwieser, J., Simonyan, K., Antonoglou, I.,
Huang, A., Guez, A., Hubert, T., Baker, L., Lai, M.,
Bolton, A., et al. (2017). Mastering the game of go
without human knowledge. nature, 550(7676):354–
359.
Sutton and Barto (2020). Reinforcement Learning, An In-
troduction. The MIT Press.
Tesauro, G. (1995). Temporal difference learning and td-
gammon. Communications of the ACM, 38(3):58–68.
Tijsma, A. D., Drugan, M. M., and Wiering, M. A. (2016).
Comparing exploration strategies for q-learning in
random stochastic mazes. In 2016 IEEE Symposium
Series on Computational Intelligence (SSCI), pages 1–
8. IEEE.
Urmson, C., Anhalt, J., Bagnell, D., Baker, C., Bittner, R.,
Clark, M., Dolan, J., Duggins, D., Galatali, T., Geyer,
C., et al. (2008). Autonomous driving in urban envi-
ronments: Boss and the urban challenge. Journal of
Field Robotics, 25(8):425–466.
Vitelli, M., Chang, Y., Ye, Y., Wołczyk, M., Osi
´
nski, B.,
Niendorf, M., Grimmett, H., Huang, Q., Jain, A.,
and Ondruska, P. (2021). Safetynet: Safe planning
for real-world self-driving vehicles using machine-
learned policies. arXiv preprint arXiv:2109.13602.
Watkins, C. J. and Dayan, P. (1992). Q-learning. Machine
learning, 8(3-4):279–292.
Xu, H., Gao, Y., Yu, F., and Darrell, T. (2017). End-to-
end learning of driving models from large-scale video
datasets. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 2174–
2182.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
266
