
Fostering Well-being in Care with the Nautical Designed Plant Watering
Robot
Philipp Graf
1 a
, Kevin Lefeuvre
3 b
, Oskar Palinko
2 c
, Lakshadeep Naik
2 d
, Christian Zarp
2 e
,
Andreas Bischof
1 f
and Eva Hornecker
3
and Norbert Kr
¨
uger
2 g
1
Technische Universit
¨
at Chemnitz, Strasse der Nationen 62, 09111 Chemnitz, Germany
2
University of Southern Denmark, Campusvej 55, 5230 Odense, Denmark
3
Bauhaus-Universit
¨
at Weimar, Bauhausstr. 11, 99423 Weimar, Germany
Keywords:
Human-robot Interaction, Unfocused Interaction, Distributed Agency, Elderly Care.
Abstract:
The well-being of older people in care homes does not only rely on health and bodily needs but also includes
spiritual or social needs. The presence of plants and distraction from everyday routines are two rarely ad-
dressed issues in this regard. Having those in mind, we developed the concept of the ’Plant Watering Robot’
(PWR), a robotic device that has a double purpose: to water plants and serve as an attraction to observers
thereby creating amusement. It is designed as a little ship inhabited by a small ’captain’ that is displayed as
being in charge of the device’s actions. The pilot interacts with various synchronized elements building up
a narrative of being in charge of watering the plants. We first report on related work before describing the
interaction concept in more detail. We then elaborate the technical implementation of the PWR focussing on
mechanical and software aspects.
1 INTRODUCTION
Building on our ethnographic fieldwork in residen-
tial care homes and the literature, we know that not
only physical care tasks are crucial for the health of
older people but that there is a wide range of as-
pects that contribute to the well-being of this vul-
nerable group as well (Rissanen, 2013). Two of the
overriding themes, which are rarely mentioned in the
scientific literature, is the lack of indoor plants on
the one hand, but also the monotony of everyday life
caused by the constant routine of institutional proce-
dures on the other. In the present paper, we report on
the general concept and the technical development of
the PWR prototype as part of the ReThiCare project,
which uses an exploratory and co-design approach to
rethink the design spaces of care technologies for el-
a
https://orcid.org/0000-0003-4556-956X
b
https://orcid.org/0000-0002-1566-1659
c
https://orcid.org/0000-0002-4513-5350
d
https://orcid.org/0000-0002-2614-8594
e
https://orcid.org/0000-0001-8922-0621
f
https://orcid.org/0000-0003-0437-9794
g
https://orcid.org/0000-0002-3931-116X
derly care (ReThiCare, 2021). We designed a robotic
device that has a two-folded purpose: It shall on the
one hand – and also as a pretext – take care of water-
ing indoor plants in a care home. On the other hand, it
is intended to attract attention through its playful de-
sign, nautical narrative and internal interaction behav-
ior of the pilot (or ‘captain’) interacting with the ship,
thus distract from the everyday routines of older peo-
ple in care homes (see Fig. 1 and 2). By implementing
a small robotic pilot on top of the robot, that is dis-
played as being in control of the actions of the device,
we hope to build an illusion of distributed agency
within one robotic device. We propose to use the term
distributed agency to describe the perception of a user
where a robotic device is not perceived as a uniformly
acting device, but rather as a machine controlled by a
robotic agent. We hope that this puts the human coun-
terparts into an observer’s position and thereby relieve
them from possibly pressuring expectations (i.e. to
interact with the robot directly). Additional elements
on the robot, each of them contributing to the robot’s
choreography, serve as a possible source of informa-
tion for the audience about upcoming actions of the
robot and are aligned to the overall nautical narrative.
Graf, P., Lefeuvre, K., Palinko, O., Naik, L., Zarp, C., Bischof, A., Hornecker, E. and Krüger, N.
Fostering Well-being in Care with the Nautical Designed Plant Watering Robot.
DOI: 10.5220/0010909000003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 2: HUCAPP, pages
255-261
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
255

For example the rotating radar is supposed to inform
about the search mode of the robot whereby it navi-
gates through the room searching for plant pots. The
watering process is then depicted as being controlled
by the little pilot. We hereby offer a new interaction
concept for service and logistic robots in the context
of elderly care that combines a logistical (or utilitar-
ian) task with the social need for amusement and dis-
traction from daily routines in a synergetic way.
Figure 1: Screenshot of the videoprototype showing a use
case scenario of the Plant Watering Robot in a care setting.
Here, we first explain related work regarding the
watering task, the aspect of amusement and activa-
tion robots for older people, and then focus on the
aspect of distributed agency and attribution of expec-
tations on a robot. We then present our concept of the
Plant Watering Robot (PWR) alongside its interaction
concept and elaborate the mechanical implementation
and the behavior planning in detail. We conclude with
remarks on the planned empirical testing of the robot
in a real-life setting and possible scopes of analysis.
2 RELATED WORK
While there are a lot of different robotic approaches
for the purpose of elderly care, only a few, like the
robotic seal Paro (Klein et al., 2013) appear to really
fit into the actual field of care. As we know from
studies, the use of Paro relies on active deployment
by a caregiver, who situates the robot in the interac-
tion with People with Dementia (PwD). This is ob-
viously also the case for simpler care technology like
lifting devices, which can have an over straining effect
for the residents as those work directly on the body
(Hornecker et al., 2020). As we wanted the PWR to
function without caregivers supervision we decided to
construct a use scenario in which the robot does not
directly interact with the user but only is observed by
them. By avoiding focused interaction that eventually
entails verbal dialogue or even direct body contact,
we hope to foster the robots functionality when it is
sharing the same space with elderly or PwD.
The task of taking care of plants, i.e. by watering
them, is widely addressed by the sub-field of farm-
ing robotics. On the smaller scales of our context
given, namely the watering of houseplants, we found
only a few similar projects. The “Plant Watering Au-
tonomous Mobile Robot” by Nagaraja et al. (Na-
garaja et al., 2012), for example, consists of a robotic
platform with social cues, that acts on a hard-coded
behavior script. Not only to make task performance
more autonomous, but also to make the process of
searching for plant pots more interesting to look at,
we wanted to implement an autonomous and also each
time slightly varying movement behavior. This mo-
tivated us to develop a more autonomous robot us-
ing a more flexible behavior planning, consisting of a
search mode for plant pots and flexible motion plan-
ning. Also, in order to fulfill the main purpose of the
robot, the distraction of daily routines and serving as
talking points to residents and visitors, we consider it
important not to implement a strict movement trajec-
tory but to establish navigation in a varying but inten-
tional manner.
The most important source of inspiration for our
study was the CERO project (H
¨
uttenrauch et al.,
2004; Severinson-Eklundh et al., 2003), which imple-
mented a small character on top of a service robot giv-
ing feedback to user’s input and thereby complement-
ing the interface. The movement of the small char-
acter was synchronized to the spatial behavior of the
robot in order to make its movement trajectory more
predictable for human counterparts when encounter-
ing it – for example, the character rows its arms ac-
cording to the speed of the device. The additional
feedback given by the small character in an abstract
but familiar way enhances its readability and thereby
makes the robot better aligned to its social environ-
ment. The pilot serves as a subject of agency attribu-
tion that is separated but still connected to the rest of
the robot’s body.
Recent years have seen significant progress in
technologies for mobile robots driven by the open-
source Robot Operating System (ROS) framework.
This has resulted in the development of frameworks
such as move base (Zheng, 2021) for navigation on
mobile robots. Further, deep learning developments
in the past decade has also significantly improved the
perception and interaction capabilities of the robot
(Pierson and Gashler, 2017). This has resulted in
the development of object detectors (Wu et al., 2019)
or pose estimators (Deng et al., 2021), thus enabling
HUCAPP 2022 - 6th International Conference on Human Computer Interaction Theory and Applications
256

robots to detect and approach the objects such as plant
pots. We make use of these state of the art technolo-
gies in the development of this plant watering robot.
3 THE GENERAL CONCEPT OF
THE PLANT WATERING
ROBOT
It is well known that people’s general well-being de-
pends not only on their basic physical needs (the
so called existential needs) but also includes social,
spiritual, and cognitive needs. We also know from
studies, that the presence of plants can contribute
to the “psychological and social well-being” in el-
derly care settings (Rappe and Linden, 2002). Al-
though scientifically not fully explained, the presence
of “indoor plants can provide psychological benefits
such as stress-reduction and increased pain tolerance”
(Bringslimark et al., 2009). This is also taken into ac-
count in many care homes, although it is additional
work that often falls behind the core activity of care
work. Another factor of current care work, which we
identified in our field research and which we would
like to address, is the generation of distraction from
the monotonous daily routine people living in care
homes often experience. The PWR answers to those
two identified but distinct needs, the lack of plants,
and the lack of distraction from daily routines, in a
combined way: It is not only supposed to help main-
taining plants in a care home, but it should firstly
entail a nice-to-watch process and serve as a talking
point, residents, care staff or visitors may talk about
when encountered.
By doing so we try to bring back more organic
but also more social life into care homes – thereby
fostering the well-being of older people.
With the PWR, we propose a new interaction con-
cept, that is based on the idea of evoking a distributed
agency attribution on one robotic device. We hereby
hope to overcome the predominant view of robots as
one holistic actor with a unified body. As depicted
(Fig. 2), the PWR is designed as a sort of deep sea
vessel with a propeller that is controlled by a small
pilot, a myKeepOn. The myKeepOn is a robotic toy
based on the research robot KeepOn, built by Hideki
Kozima (Kozima et al., 2009), and is widely acknowl-
edged for its universal social cueing capabilities. The
following description is structured along two different
perspectives, one decidedly social and one decidedly
technical. While the social perspective focuses on the
interaction concept and the overall nautical motive,
the technical part focuses on the mechanical imple-
Figure 2: Technical overview of main elements.
mentation of the single elements and explains the be-
havior control of the whole PWR in detail.
3.1 Interaction Concept
We created a playful narrative with a nautical motive
around the robot’s form, actions, and behavior. That
is the pilot driving around its habitat and taking care
of the plants with the help of the ship which it con-
trols. By evoking the ascription of different agency
attributions on one robot, one social one (the pilot),
and several non-social ones (the ship or vessel and
the additional elements), we hope to build an illusion
of a captain that navigates (or controls) a ship (Fig.
2). We try to foster this storyline aspect by adding
five more elements to the robot, with which the pi-
lot engages or that react to this engagement: a bell,
a propeller, a radar, a control panel, and the watering
arm. The whole choreography is coherently synchro-
nized to the whole robot’s motion and task fulfillment.
We hope that this form of mechanical storytelling fos-
ters the robustness of the robot in the socially com-
plex care environment by enhancing its readability
and predictability.
For the effect of evoking a control relationship be-
tween the pilot and the ship’s elements, we consider
it especially crucial to find the right composition of
the elements interacting and – even more important –
an appropriate and coherent timing. The PWR hereby
also serves as a form of mobile stage (Lefeuvre et al.,
2021) for the pilot and opens up a non-dyadic inter-
action structure that offers the user the position of a
mere observer of a robotic theatre instead of a possi-
ble interaction partner in a focused and possibly over-
straining interaction. It hopefully may be observed
with joy and curiosity while it is present in care homes
Fostering Well-being in Care with the Nautical Designed Plant Watering Robot
257

a) Skeleton mounted on the Turtlebot. b) The PWR hull. c) Hull and skeleton assembled.
Figure 3: The main components of the PWR.
contributing to plant care but it can also be ignored.
The ‘Ship’ is colored in typical deep sea vessel blue
and red and has round portholes. Each additional ele-
ment on the deck fulfills a role in the narrative of the
robot’s behavior and task fulfillment: The propeller at
the back of the ship indicates the actual and upcom-
ing speed and direction of the robot’s movement. The
functionality of this element leans on another boat as-
sociation, the hovercraft. Building on this, we hope
to use the propeller as a delayed but still coherent in-
dicator for upcoming adjustments of the robot’s di-
rection or speed. Although the propeller disrupts the
motive of a deep-sea-vessel we hope it could be an in-
tuitively readable concept for older people or maybe
even for people with dementia. The watering process
is visualized with the help of two additional elements,
the radar on top of the cabin and a control panel next
to the myKeepOn. The radar rotates while the robot
navigates through the room indicating that the pilot is
searching for plant pots. In order to break the predom-
inant expectation towards robots regarding their fixed
routine behavior, we implement a varying search be-
havior so that the pilot searches the same room on
always different routes. The control panel visualizes
the next step of the watering process: While the ship
adjusts itself to the plant pot, the pilot turns to the con-
trol panel, indicating the upcoming start of the water-
ing process itself. The watering arm was designed co-
herently to the nautical motive and detracts from the
vessel when the watering process is being started by
the pilot.
3.2 Technical Description
In this section, we describe the technical details of
the current prototype. First, we present the mechan-
ical structure of the robot, followed by the behavior
control architecture and technical implementation of
these behaviors.
3.2.1 Mechanical Description
The PWR robot from a mechanical perspective, con-
sists of 4 major parts, as described below:
1. The ‘skeleton’, meaning the TurtleBot3 platform,
which also holds an aluminium frame (referred to
as the “aluminium skeleton”).
The aluminium skeleton’s function is to attach the
‘hull’ to the TurtleBot3 platform. Now the hull
and deck sit atop the aluminium skeleton. How-
ever, in the future, it will be mounted via 3D
printed PLA mounting brackets. The aluminium
skeleton is also mounted to the TurtleBot3 using
3D printed PLA mounting brackets. An image
of the skeleton on the TurtleBot3 platform can be
seen in fig. 3a.
2. The ‘Hull’, which is referred to as the robots shell.
This part is the visible part which resembles the
hull of a ship and hides the battery, the controllers,
motors etc. (section 3.2). The shell itself has been
3D printed in multiple pieces of the material PLA
on a Ultimaker s5 FDM printer. Hereafter it was
glued together. For a future prototype, this shell
will be upscaled and 3D printed in one piece. An
image of the shell, by itself, can be seen in fig.3b.
HUCAPP 2022 - 6th International Conference on Human Computer Interaction Theory and Applications
258
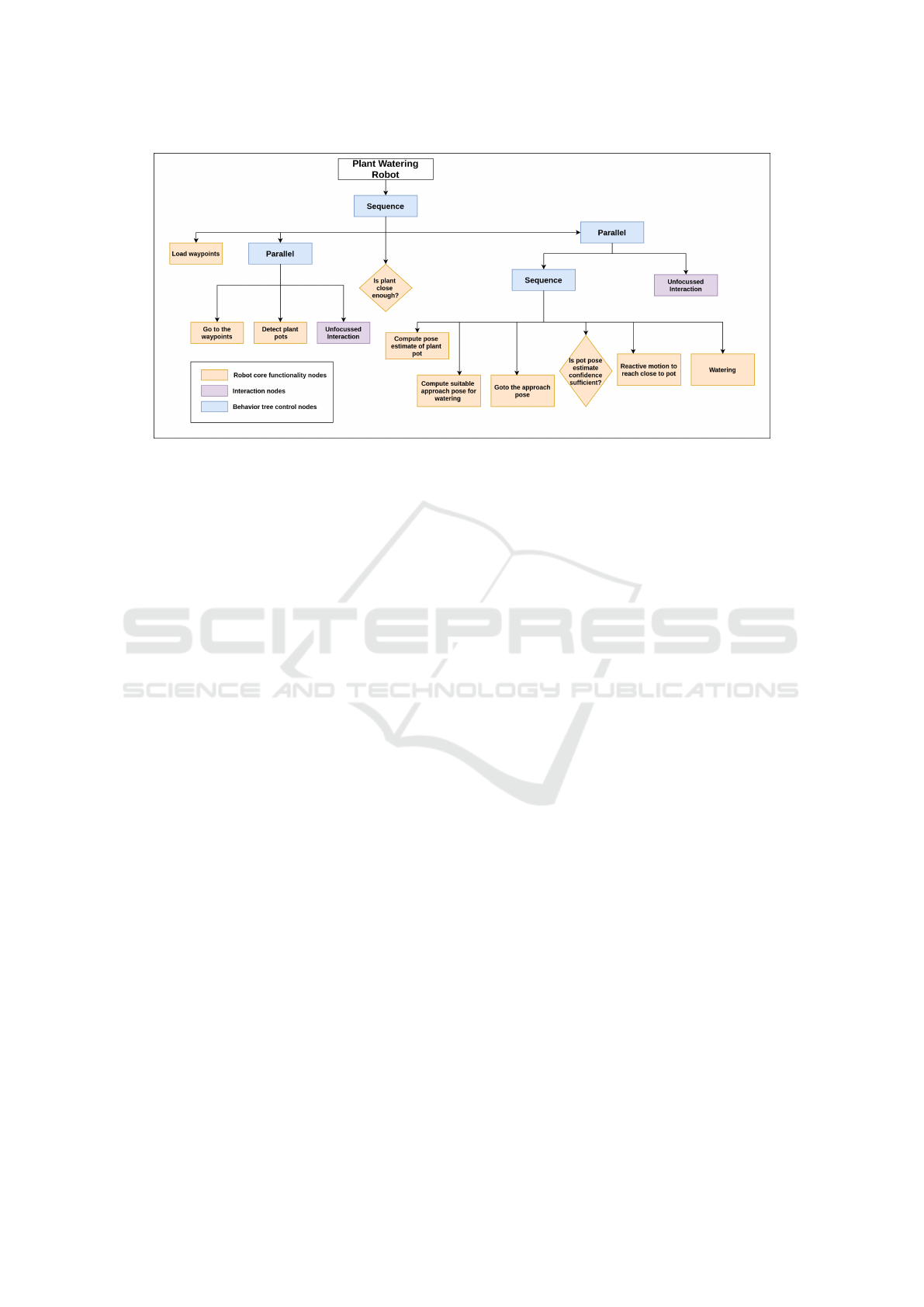
Figure 4: PWR behavior control architecture.
3. The ‘Deck’, which is the part that holds the move-
able components for the narrative (section 3.2.2)
parts and also the water tank. The deck is consid-
ered a part of the shell and can be seen mounted to
the shell in section 3.2.2. The deck is 3D printed
in two pieces and is also printed in PLA material,
on the Ultimaker s5 FDM printer. The two pieces
are glued together and then mounted to the top of
the shell.
4. The narrative components, which are the movable
components on top of the Deck, are controlled
centrally. These parts can be seen in fig. 2 together
with a small description of their function. A me-
chanical description is given in the following:
The ‘control panel’ – This part will be added
in the next prototype and will be 3D printed
with PLA material. The control panel will have
control able LED lights, for indicating watering
on/off.
The ‘pilot’ – This part is a myKeepOn, and it
sits on top of the ship’s deck and ‘controls’ the
vessel. It is a simple soft robotic agent with
a rubbery yellow surface and three degrees of
freedom. It can yaw, roll and bounce. The pro-
peller consists of two servo motors: one for yaw
motion, while the other for the continuous rota-
tion of the propeller arms.
The ‘propeller’ – This part uses two servo mo-
tors, one for yawing the base of the propeller,
used to indicate the direction of the PWR’s mo-
tion behavior. The second servo motor is used
to spin the propeller. The speed of the propeller
spin indicates the speed of the PWR. The pro-
peller mounting is 3D printed in PLA, and the
propellers themselves are wooden.
The ‘radar’ – The radar is 3D printed in PLA
and uses a servo motor to rotate. This rotation
indicates that the PWR is looking for plants to
water and may not move on a clear trajectory.
This part will be implemented in the next pro-
totype.
The ‘bell’ – The bell sits at the stem of the
PWR, and rings when entering a room. The
bell is mounted on a 3D printed tower, with a
small metal bell at the end. The bell is rung
using a servo motor connected to the bell via a
steel wire. The bell will be added to the next
prototype.
The ‘watering arm’ – The watering arm sits
inside the shell on the side of the ship. The wa-
tering arm has two servo motors, to give it two
joints to be deployed and retracted. The struc-
tural parts of the arm is 3D printed using PLA.
A tube runs from the tip of the arm to the wa-
ter tank within the PWR. Here the tube is con-
nected to a small pump, which is controlled by
the Raspberry Pi board.
3.2.2 Behavior Control
The robot has a Raspberry Pi board as the main com-
puter. All the basic planning and control algorithms
such as navigation and manipulation run on it. All
other components such as the two DoF arm for wa-
tering, the propeller, the radar and the myKeepOn
are also controlled using this computer. In addition
to this, the robot is equipped with the GPU enabled
NVIDIA Jetson Xavier for running deep learning al-
gorithms required for plant detection.
We make use of the behavior trees (Colledanchise
and
¨
Ogren, 2018), for implementing the core func-
Fostering Well-being in Care with the Nautical Designed Plant Watering Robot
259

(a) PWR navigating from room to room looking around
for plant pots
(b) PWR enters the room
(c) PWR approaches the detected plant (d) PWR waters the plant
Figure 5: Plant Watering Robot (PWR) behavior overview.
tionalities of the robot such as navigation and ma-
nipulation as well as for the interactions described in
section 3.1. Behavior trees provide an efficient way
to combine multiple behaviors, while still ensuring a
modular and reactive system. Fig. 4 describes the be-
havior control architecture of our robot using the be-
havior tree. Orange nodes are responsible for execut-
ing the core functionalities of the robot including nav-
igation, detecting plant pots and watering while blue
nodes are default behavior tree control nodes that are
used to combine these different nodes to implement
high-level behaviors. Purple nodes implement unfo-
cused interactions by synchronising actions of the dif-
ferent components on top of the robot with the robot’s
general actions. These unfocused interaction nodes
use several different components present on the deck
of the robot thus resulting in multi-modal interaction.
The robot is first provided with a set of pre-
recorded way-points in the environment. It navigates
from one way-point to another looking for plant pots
(see Fig. 5 (a) and (b)). For moving from one way-
point to another (point to point navigation) it uses
the move-base framework provided by ROS (Quigley
et al., 2009) navigation stack. Plants are perceived us-
ing deep learning-based detectron2 (Wu et al., 2019)
framework using a MaskRCNN (He et al., 2017) base
for semantic segmentation and bounding box detec-
tion. The model is fully trained on PhotoRealistic
synthetic data using BlenderProc (Denninger et al.,
2019) without any manual annotations. Once the
plant pot is detected, the robot tracks its full pose
distribution using PoseRBPF (Deng et al., 2021) and
starts approaching the plant pot (see Fig. 5 (c)). Once
it is sufficiently close to the plant pot and has suffi-
cient confidence about the pot pose estimate it starts
the watering process (see Fig. 5 (d)).
4 CONCLUSION AND FURTHER
WORK
In this work, we have presented the concept of the
Plant Watering Robot (PWR), a robotic device that
is supposed to evoke a distributed agency attribu-
tion while it is fulfilling its task thereby questioning
the predominant conception of robots as unified and
holistic actors (Krummheuer et al., 2020; Lefeuvre
et al., 2021). By using additional non-social but sym-
bolic elements on the robot with which the small pi-
lot seems to interact, we hope to construct an illusion
of control that puts the user into an observer’s role
thereby relieving him or her from the pressure of di-
rect interaction with an unknown robotic entity. By
HUCAPP 2022 - 6th International Conference on Human Computer Interaction Theory and Applications
260

using a coherent choreography with and around the
robotic device we hope to evoke a poetic and alter-
native narrative – ‘the pilot and its ship taking care
of plants’ – around the robot’s presence and its func-
tioning. We hope that this playful interaction design
approach will help to explore new design spaces for
robots in the context of care.
Our current prototype is able to perform the core
functionalities of watering and indicating its move-
ment and watering behavior. The next step of devel-
opment will focus on designing and integrating the
interaction scenarios described in Section 3.1 into the
robots behavior. We will use video-based user stud-
ies in order to evaluate the coherence of the sequential
order and find the appropriate timing of the synchro-
nized activities of the pilot, the ship, and the other el-
ements. After pretesting the PWR in a university set-
ting, we plan to conduct field tests in an elderly care
home. With the use of in-depth videographic analysis
of the interactions, we hope to answer the questions
whether the implemented interaction concept with a
distributed agency can foster the acceptance and read-
ability of a robot and at the same time evoke amuse-
ment in the residents thus contributing to the general
well-being of older people.
ACKNOWLEDGEMENTS
This work was funded by the VolkswagenStiftung in
the context of the ReThiCare project. We thank in
particular Emanuela Marchetti and Mira Thieme for
their work on the project.
REFERENCES
Bringslimark, T., Hartig, T., and Patil, G. G. (2009). The
psychological benefits of indoor plants: A critical re-
view of the experimental literature. Journal of Envi-
ronmental Psychology, 29(4):422–433.
Colledanchise, M. and
¨
Ogren, P. (2018). Behavior trees in
robotics and AI: An introduction. CRC Press.
Deng, X., Mousavian, A., Xiang, Y., Xia, F., Bretl, T., and
Fox, D. (2021). Poserbpf: A rao–blackwellized parti-
cle filter for 6-d object pose tracking. IEEE Transac-
tions on Robotics.
Denninger, M., Sundermeyer, M., Winkelbauer, D., Zi-
dan, Y., Olefir, D., Elbadrawy, M., Lodhi, A., and
Katam, H. (2019). Blenderproc. arXiv preprint
arXiv:1911.01911.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
Hornecker, E., Bischof, A., Graf, P., Franzkowiak, L., and
Kr
¨
uger, N. (2020). The interactive enactment of care
technologies and its implications for human-robot-
interaction in care. In Proceedings of the 11th Nordic
Conference on Human-Computer Interaction: Shap-
ing Experiences, Shaping Society, pages 1–11.
H
¨
uttenrauch, H., Green, A., Norman, M., Oestreicher, L.,
and Eklundh, K. S. (2004). Involving users in the de-
sign of a mobile office robot. IEEE Transactions on
Systems, Man, and Cybernetics, Part C (Applications
and Reviews), 34(2):113–124.
Klein, B., Gaedt, L., and Cook, G. (2013). Emotional
robots. GeroPsych.
Kozima, H., Michalowski, M. P., and Nakagawa, C. (2009).
Keepon. International Journal of Social Robotics,
1(1):3–18.
Krummheuer, A. L., Rehm, M., and Rodil, K. (2020). Tri-
adic human-robot interaction. distributed agency and
memory in robot assisted interactions. In Companion
of the 2020 ACM/IEEE International Conference on
Human-Robot Interaction, pages 317–319.
Lefeuvre, K., Hornecker, E., and Graf, P. (2021). Designing
a robot for elderly care homes based on the notion of
‘robot as theatre’. In Proceedings of the ACM MUM
2021 conference / forthcoming.
Nagaraja, H., Aswani, R., and Malik, M. (2012). Plant wa-
tering autonomous mobile robot. IAES International
Journal of Robotics and Automation, 1(3):152.
Pierson, H. A. and Gashler, M. S. (2017). Deep learning
in robotics: a review of recent research. Advanced
Robotics, 31(16):821–835.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., Ng, A. Y., et al. (2009). Ros: an
open-source robot operating system. In ICRA work-
shop on open source software, volume 3, No. 3.2,
page 5. Kobe, Japan.
Rappe, E. and Linden, L. (2002). Plants in health care en-
vironments: Experiences of the nursing personnel in
homes for people with dementia. In XXVI Interna-
tional Horticultural Congress: Expanding Roles for
Horticulture in Improving Human Well-Being and Life
Quality 639, pages 75–81.
ReThiCare (2021). ReThiCare rethinking care robots. http:
//www.rethicare.info/. Accessed: 2021-11-04.
Rissanen, S. (2013). Wellbeing and environment–concepts
in the elderly care home context. Designing wellbeing
in elderly care homes, pages 20–35.
Severinson-Eklundh, K., Green, A., and H
¨
uttenrauch, H.
(2003). Social and collaborative aspects of interac-
tion with a service robot. Robotics and Autonomous
systems, 42(3-4):223–234.
Wu, Y., Kirillov, A., Massa, F., Lo, W.-Y., and Gir-
shick, R. (2019). Detectron2. https://github.com/
facebookresearch/detectron2.
Zheng, K. (2021). Ros navigation tuning guide. In Robot
Operating System (ROS), pages 197–226. Springer.
Fostering Well-being in Care with the Nautical Designed Plant Watering Robot
261
