
Enhanced 3D Point Cloud Object Detection with Iterative Sampling and
Clustering Algorithms
Shane Ward and Hossein Malekmohamadi
Institute of Artificial Intelligence, De Montfort University, The Gateway, Leicester, U.K.
Keywords:
mAP– Mean Average Precision, RANSAC – Random Sampling and Consensus, DBSCAN – Density-based
Spatial Clustering of Applications with Noise, BIRCH – Balanced Iterative Reducing and Clustering using
Hierarchies, OPTICS – Ordering Points to Identify the Clustering Structure, MLVCNet – Multi-level Context
VoteNet.
Abstract:
Existing state-of-the-art object detection networks for 3D point clouds provide bounding box results directly
from 3D data, without reliance on 2D detection methods. While state-of-the-art accuracy and mAP (mean-
average precision) results are achieved by GroupFree3D, MLCVNet and VoteNet methods for the SUN RGB-
D and ScanNet V2 datasets, challenges remain in translating these methods across multiple datasets for a
variety of applications. These challenges arise due to the irregularity, sparsity and noise present in point
clouds which hinder object detection networks from extracting accurate features and bounding box results.
In this paper, we extend existing state-of-the-art 3D point cloud object detection methods to include filtering
of outlier data via iterative sampling and accentuate feature learning via clustering algorithms. Specifically,
the use of RANSAC allows for the removal of outlier points from the dataset scenes and the integration of
DBSCAN, K-means, BIRCH and OPTICS clustering algorithms allows the detection networks to optimise the
extraction of object features. We demonstrate a mean average precision improvement for some classes of the
SUN RGB-D validation dataset through the use of iterative sampling against current state-of-the-art methods
while demonstrating a consistent object accuracy of above 99.1%. The results of this paper demonstrate
that combining iterative sampling with current state-of-the-art 3D point cloud object detection methods can
improve accuracy and performance while reducing the computational size.
1 INTRODUCTION
For common point cloud object detection applica-
tions involving scene understanding, the accuracy and
performance of the method relies heavily on pre-
processing of the input data prior to training the ob-
ject detection neural network. In complex real-world
applications, the scene and objects to be inspected
are susceptible to large amounts of outlier points and
noise which results in reduced accuracy and perfor-
mance. This also results in suboptimal use of com-
putational power on input data points which provide
misleading information of the objects in the scene.
Recent works related to neural networks for 3D ob-
ject detection, specifically using point cloud input,
have yielded promising results for various applica-
tions. It has also been demonstrated that the use of
purely geometric data with existing state-of-the-art
neural networks such as VoteNet (Qi et. al, 2019),
MLCVNet (Xie et. al, 2020) and GroupFree3D (Liu
et. al, 2021) can produce superior results compared
to methods which utilize 2D detectors and approxi-
mate 3D bounding box proposals based on 3D region
networks. Methods heavily influenced by 2D detec-
tors become computationally expensive for deducing
3D proposals for complex scene understanding and
applications where speed is critical.
The PointNet (Qi et. al, 2017) architecture was the
catalyst for the development of this new set of deep
learning methods with the objective of directly pro-
cessing point cloud data to tackle classification, seg-
mentation, and object detection tasks. Prior to this
work, most 3D object detection methods performed
operations on 2D and 2.5D data to infer or project de-
tection algorithms onto 3D space such as Shape-based
3D matching or by transforming the 3D point cloud
data from irregular point clouds to regular 3D voxel
grids with methods based on VoxelNet. The PointNet
architecture was improved in terms of capturing local
structures in metric space, addressed by PointNet++.
674
Ward, S. and Malekmohamadi, H.
Enhanced 3D Point Cloud Object Detection with Iterative Sampling and Clustering Algorithms.
DOI: 10.5220/0010910600003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
674-681
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The PointNet++ architecture is a direct extension of
PointNet using additional sampling and grouping in
conjunction with PointNet. This improved the ear-
lier method by using a hierarchical network utilizing
sampling and grouping layers which in turn improved
the model’s ability to classify and segment in met-
ric space. The current state-of-the-art works for 3D
point cloud object detection all utilize a PointNet++
backbone with additional network architectures for
each such as deep hough voting (Qi et. al, 2019),
multi-level context attention (Xie et. al, 2020) and
transformer-based attention (Liu et. al, 2021).
In this paper, we build on the existing state-of-
the-art 3D point cloud object detection methods by
demonstrating the importance of iterative sampling
and clustering algorithms to achieve both fast and ac-
curate 3D bounding box proposals. We propose en-
hanced versions of the current state-of-the-art meth-
ods by integrating a RANSAC iterative sampling
method and combining this with multiple clustering
algorithms to serve a wide variety of applications
(DBSCAN, K-Means, BIRCH, OPTICS). The itera-
tive sampling method provides a customisable filter
for the raw input point cloud data to separate outliers
and the various clustering algorithms allow for the
early extraction of features prior to neural network
training. For fair comparison we run our enhanced
VoteNet, MLCVNet and GroupFree3D methods on
two common benchmark indoor 3D datasets, SUN-
RGBD and ScanNet. The objective of this work is to
present the following contributions:
1. Propose a novel iterative sampling and clus-
tering framework for 3D point cloud object detection
and can be applied to a wide variety of applications.
We demonstrate increased efficiency, accuracy and
speed through our pre-processing framework.
2. Enhanced VoteNet, MLCVNet and
GroupFree3D methods achieving state-of-the-art
results through:
- Integration of customisable iterative sampling
method for the filtering of outlier points.
- Integration and comparison of four customis-
able clustering methods to allow for early feature
extraction in training phase.
3. Considerations for deployment of state-of-the-
art 3D object detection methods in real-world ap-
plications where efficiency, accuracy and speed are
paramount.
2 BACKGROUND
In recent times, there have been many contributions
to the state-of-the-art methods for 3D object detection
on various input data. In this section, we review the
methods most relevant to this work and specifically
for methods with point cloud input data.
PointNet. The PointNet architecture as previously
stated was a large breakthrough in the direct process-
ing of raw point cloud data to achieve results with-
out the use of 2D detectors. There are advantages to
this method such as the processing time and ability to
process low numbers of data points but disadvantages
such as poor accuracy and the disconnect between the
data representation and the actual world scene, make
the method unusable for 3D point cloud object detec-
tion in applications where dense scene understanding
is a requirement. The PointNet architecture provided
an end-to-end network for the classification, part seg-
mentation and semantic segmentation of raw point
cloud data. The method which uses sampling of point
sets, is an alternative to 3D voxelization which ap-
proximates errors for applications where high accu-
racy is required. This work demonstrated that with
a basic architecture reasonable results are achieved.
For testing robustness, it was shown that with 50% of
points missing from an input set via random sampling,
the accuracy only dropped by 2.4% and 3.8%. Also,
the method demonstrated robustness to outlier points,
achieving greater than 80% accuracy even when 20%
of points are outliers. PointNet was the first of its
kind in demonstrating computational cost efficiency
which is an important factor in industrial applications.
PointNet is capable of processing greater than 1M
points/second with 1080X GPU showing great poten-
tial for real-time applications but the method did not
capture local structures in metric space.
PointNet++. The shortcomings of the PointNet archi-
tecture in terms of capturing local structures in met-
ric space were quickly addressed with PointNet++.
The architecture is a direct extension of PointNet us-
ing additional sampling and grouping in conjunction
with PointNet. This improved the earlier method by
using a hierarchical network utilizing sampling and
grouping layers which in turn improved the mod-
els ability to classify and segment in metric space.
The performance of the PointNet++ method on the
ModelNet40 dataset outperformed Subvolume (voxel
method), MVCNN (image method) and the earlier
PointNet method (Point clouds) with an accuracy of
91.9%. The paper acknowledged that further work in
improving inference speed (especially for MSG and
MRG layers) was a future option. It is also noted that
CNN based methods do not apply to unordered point
sets (point cloud data) and that the method can scale
well.
VoteNet. Perhaps the biggest breakthrough related to
this work was the introduction of the Deep Hough
Enhanced 3D Point Cloud Object Detection with Iterative Sampling and Clustering Algorithms
675

Voting network for object detection, also known as
VoteNet. The method of this paper, utilizes a Point-
Net++ backbone for feature learning and couples this
with Deep Hough voting in order to sample, group
and propose classification. The VoteNet method uti-
lizes 3D bounding boxes and depends solely on ge-
ometric information. As previously stated, VoteNet
does not make use of RGB or Depth images similar
to other methods which supports the theory that state-
of-the-art object detection methods may be developed
from the processing of raw point clouds i.e., this is an
end-to-end method. In summary, the VoteNet method
learns to vote to object centroids directly from raw
point clouds and aggregates votes through their fea-
tures and local geometry to generate high-quality de-
tection proposals using only point cloud input, outper-
forming other methods where depth and colour im-
ages are also used.
MLCVNet. The objective of the MLCVNet (multi-
level context VoteNet) method is to recognize 3D
objects correlatively, building on the state-of-the-art
VoteNet. This method utilizes a self-attention mech-
anism and multi-scale feature fusion to model the
multi-level contextual information and propose three
sub-modules. The testing performed by the authors
of this paper proves that the contextual sub-modules
improve the accuracy and performance of 3D object
detection. The results of the MLCVNet architecture
described in the MLCVNet paper can be described
as state-of-the-art. On the ScanNet v2 dataset, the
MLCVNet method outperformed VoteNet and 3DSIS
methods for all categories of the dataset in terms of
mAP. Also, the qualitative results of 3D object de-
tection on the SUN-RGBD dataset demonstrate state-
of-the-art results. The ground truth bounding boxes
were compared to the results of mainly the VoteNet
and MLCVNet networks.
GroupFree3D. At the time of undertaking this
work, the most recent state-of-the-art neural net-
work method for performing object detection on point
cloud data is the GroupFree3D method. The method
computes the feature of an object from all points
in the scene point cloud through the help of an at-
tention mechanism where the contribution of each
point is automatically learned during the training
phase. GroupFree3D proposes an attention mecha-
nism which utilises a Transformer decoder allowing
for all points in the input point cloud to be used during
training. Implemented on the benchmark SUN RGB-
D and ScanNet v2 datasets, the method obtained state-
of-the-art mAP results of 69.1 @ 0.25 and 52.8 @
0.50. The authors for this work also executed abla-
tion studies on sampling strategy which demonstrated
improvements on the initial results. The objective of
this work is to build on recent state-of-the-art devel-
opments through implementation and evaluation of
enhanced versions of the identified current state-of-
the-art end to end 3D object detection methods on a
benchmark 3D point cloud dataset.
3 METHODOLOGY
We present a framework for performing iterative sam-
pling and clustering of point cloud data for 3D object
detection methods. The desired outcome of combin-
ing iterative sampling and clustering methods results
is to reduce the number of points in the input point
cloud. As a result of iterative sampling, the input
point cloud will have outlier points filtered which im-
proves the neural network’s ability to accurately de-
tect objects in a dense or noisy scene. Adding cluster-
ing methods in combination with sampling will allow
for early extraction of key features and the identifi-
cation of point clusters, the building blocks of each
object present in a scene. We recognise that a wide
variety of applications may be served by such a frame-
work for 3D point cloud object detection and we
therefore include several clustering algorithm options
in the framework to cater for this.
3.1 Iterative Sampling
Iterative sampling algorithms have existed for
decades and have proven to be powerful tools in the
pre-processing and filtering of input data prior to neu-
ral network training. Perhaps the most common and
effective iterative sampling method is the Random
sample consensus (RANSAC) which estimates pa-
rameters of a mathematical model from a set of ob-
served data that contains outliers. A basic assumption
is that the data consists of inlier data points whose
distribution can be described by a model, and out-
liers which are data points which do not fit the model.
These outlier points in point cloud dada, can result in
incorrect detection approximations about the interpre-
tation of the point set.
Figure 1: Segmentation of inlier and outlier points using
RANSAC method on industrial MVTec ITODD dataset.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
676

This outlier detection method applies to a wide
range of data science applications, but in this context
applies to dense point clouds for real-world applica-
tions. The removal of points in input point clouds
which provide no contextual information of objects
to be detected will reduce bounding box detection in-
accuracies and result in increased computational ef-
ficiency. The issue of computational size in training
neural networks with point cloud data remains one of
the most prevalent and RANSAC allows for signifi-
cant reductions in non-contextual points in the input
data. The most relevant purpose of of the RANSAC
method is to provide a robust method for the segmen-
tation and removal of planes from point cloud scenes
which is important in many applications where base
planes are present with the objects to be inspected on
top of the base plane.
3.2 Clustering
Similar to iterative sampling methods, clustering al-
gorithms allow data points to be grouped into clus-
ters in an unsupervised manner. However clustering
methods allow for further subdivision of point sets
into several groups as opposed to just inlier and out-
lier groups with the RANSAC method. Multiple clus-
tering algorithms exist and are widely used in data
science applications. Relevant to this work on clus-
tering point cloud data for 3D object detection, we
have included four of the most common algorithms as
options within our proposed framework for training
neural networks.
3.2.1 DBSCAN
Density-based spatial clustering of applications with
noise (DBSCAN) is a density-based clustering algo-
rithm. DBSCAN is one of the most common clus-
tering algorithms and most cited in scientific litera-
ture, hence our selection for our proposed framework.
Given a set of points in space, DBSCAN groups to-
gether points that are closely packed together i.e.
points with multiple nearest neighbors. DBSCAN
marks points that lie alone in low-density regions as
outliers i.e., points whose nearest neighbors are too
far away.
3.2.2 K-means
K-means clustering is another popular unsupervised
clustering algorithm, which aims to group a number
of observations n into a target number of clusters k.
For each observation, it belongs to the cluster with
the nearest mean (cluster centroid), which serves as a
Figure 2: DBSCAN clustering algorithm diagram.
Figure 3: DBSCAN clusters example using industrial
MVTec ITODD dataset.
prototype of the cluster. The overall effect of mini-
mizing the averages of the squared distances between
the data points in the same point set. The pseudo-code
for the K-means clustering algorithm is described in
Fig. 4 below.
Algorithm 1 k-meeans algorithm
1: Specify the number k of clusters to assign.
2: Randomly initialize k centroids.
3: repeat
4: expectation: Assign each point to its closest centroid.
5: maximization: Compute the new centroid (mean) of each cluster.
6: until the centroid positions do not change.
Figure 4: Pseudo-code for K-means clustering algorithm.
The K-means clustering method provides a useful
alternative to DBSCAN which focuses on the centroid
centres of clusters. This method aligns with the over-
all desired outcome of 3D point cloud object detection
and pointwise networks due to the use of centroid cen-
tres. The size of the clusters must be set and for this,
the mean average size of each object class is used.
3.2.3 BIRCH
Balanced iterative reducing and clustering using hier-
archies (BIRCH) is another commonly used unsuper-
vised data science algorithm used to perform hierar-
chical clustering over particularly large datasets. The
main advantage of the BIRCH clustering algorithm is
its ability to incrementally cluster multi-dimensional
metric data points in a given point set to produce the
best quality clustering for a given set of memory and
time resource constraints. As a result of the effi-
ciency of the BIRCH clustering algorithm we imple-
ment BIRCH as another option in the proposed frame-
work. BIRCH has been successfully implemented
in several related works for the clustering of multi-
dimensional point sets.
Enhanced 3D Point Cloud Object Detection with Iterative Sampling and Clustering Algorithms
677

3.2.4 OPTICS
Ordering points to identify the clustering structure
(OPTICS) is the final commonly used clustering al-
gorithm implemented in the framework for enhanc-
ing 3D point cloud object detection. The OPTICS
clustering algorithm is also used for finding density-
based clusters in spatial data. The principle of OP-
TICS is similar to DBSCAN, however it addresses
the main DBSCAN weakness: the detection of mean-
ingful clusters in data of varying density. In order to
achieve this, each point in the point set is ordered such
that the spatially closest points are neighbors in the or-
dered structure. A special distance is also stored for
each point that represents the density that must be ac-
cepted for a cluster so that both points belong to the
same cluster.
4 RESULTS AND DISCUSSION
In order to evaluate the performance of our iterative
sampling and clustering framework, we first integrate
it to the current state-of-the-art VoteNet, MLCVNet
and GroupFree3D 3D point cloud object detection
methods. We demonstrate the ability of the itera-
tive sampling to separate outlier points and reduce the
size of the input point cloud while all relevant data
points remain. We also demonstrate and compare the
ability of each clustering algorithm to enhance fea-
ture extraction in each of te state-of-the-art methods
using the benchmark SUN RGB-D and ScanNet V2
datasets with PointNet++ backbone for fair compar-
ison. All experiments for the purposes of this paper
were run utilizing the same setup for a fair compar-
ison also. The workstation consists of an Intel i9-
10900 processor (2.8GHz) and Nvidia GeForce RTX
2060 GPU. The workstation is running Ubuntu 20.04
and we use a python 3.7 anaconda environment to in-
stall all required packages, including PyTorch 1.1 and
Cuda 10.1.
4.1 Evaluation of Iterative Sampling
Enhanced VoteNet. For the implementation of this
method, we follow the provided instructions of the
VoteNet paper. This includes the use of a PointNet++
backbone with 4 set abstraction layers and 2 feature
propagation layers for a fair comparison and the use
of the common benchmark SUN RGB-D training and
validation datasets. The integration of the iterative
sampling framework method includes the modifying
the SUN RGB-D detection dataset class to include the
option to run VoteNet with RANSAC iterative sam-
pling. To achieve the results described in Tables 1
and 2 below, we use 20,000 points as the input for
each point cloud scene. We run 400 epochs with a
batch size of 8 and a learning rate of 0.001. A key
point to note is that for training we use only geometric
information and no image data for a fair comparison
against methods utilising image data.
Table 1: Mean average precision mAP @ 0.25 Enhanced
VoteNet comparison against current state-of-the-art meth-
ods on SUN RGB-D v1 validation set - Part 1.
Method bath bed bookshelf chair desk
VoteNet 74.4 93.0 28.8 75.3 22.0
MLVCNet 79.2 85.8 31.9 75.8 26.5
GroupFree3D 80.0 87.8 32.5 79.4 32.6
Ours RANSAC 80.4 87.4 30.2 63.2 96.0
Ours DBSCAN 61.8 65.4 21.3 48.6 63.5
Ours BIRCH 66.1 69.3 20.7 47.4 62.6
Ours KMeans 75.4 73.7 23.2 51.3 66.8
Ours OPTICS 64.3 66.5 21.3 44.7 59.3
Table 2: Mean average precision mAP @ 0.25 Enhanced
VoteNet comparison against current state-of-the-art meth-
ods on SUN RGB-D v1 validation set - Part 2.
Method dresser nightstand sofa table toilet
VoteNet 29.8 62.2 64.0 47.3 90.1
MLVCNet 31.3 61.5 66.3 50.4 89.1
GroupFree3D 36.0 66.7 70.0 53.8 91.1
Ours RANSAC 24.1 63.6 66.4 45.2 69.1
Ours DBSCAN 17.9 36.6 31.9 36.5 80.3
Ours BIRCH 18.1 42.2 32.5 39.9 84.4
Ours KMeans 21.3 49.4 34.3 43.5 91.1
Ours OPTICS 18.8 43.4 31.0 40.3 79.6
Table 3: Mean average precision mAP @ 0.5 Enhanced
VoteNet comparison against current state-of-the-art meth-
ods on SUN RGB-D v1 validation set - Part 1.
Method bath bed bookshelf chair desk
VoteNet 45.4 53.4 6.8 56.5 5.9
GroupFree3D 64.0 67.1 12.4 62.6 14.5
Ours RANSAC 37.7 18.6 14.2 37.4 56.4
Ours DBSCAN 42.1 19.7 6.9 19.3 5.8
Ours BIRCH 50.3 17.2 4.1 20.2 7.5
Ours KMeans 57.1 35.4 7.0 23.3 11.4
Ours OPTICS 52.2 17.7 6.3 18.2 6.9
Table 4: Mean average precision mAP @ 0.5 Enhanced
VoteNet comparison against current state-of-the-art meth-
ods on SUN RGB-D v1 validation set - Part 2.
Method dresser nightstand sofa table toilet
VoteNet 12.0 38.6 49.1 21.3 68.5
GroupFree3D 21.9 49.8 58.2 29.2 72.2
Ours RANSAC 13.6 34.7 14.4 16.0 61.3
Ours DBSCAN 6.4 17.0 7.2 23.5 63.6
Ours BIRCH 5.6 19.6 7.8 28.4 52.5
Ours KMeans 7.3 23.8 9.1 22.6 64.7
Ours OPTICS 6.1 21.0 8.1 28.9 50.7
The integration of the RANSAC iterative sam-
pling method to remove outlier points yielded promis-
ing results across the bath and desk class at mAP @
0.25 and bookshelf and desk at mAP @ 0.5 improving
on the current state-of-the-art GroupFree3D methods
shown in Tables 1 and 2 above, however the result
proved inconsistent across all classes.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
678
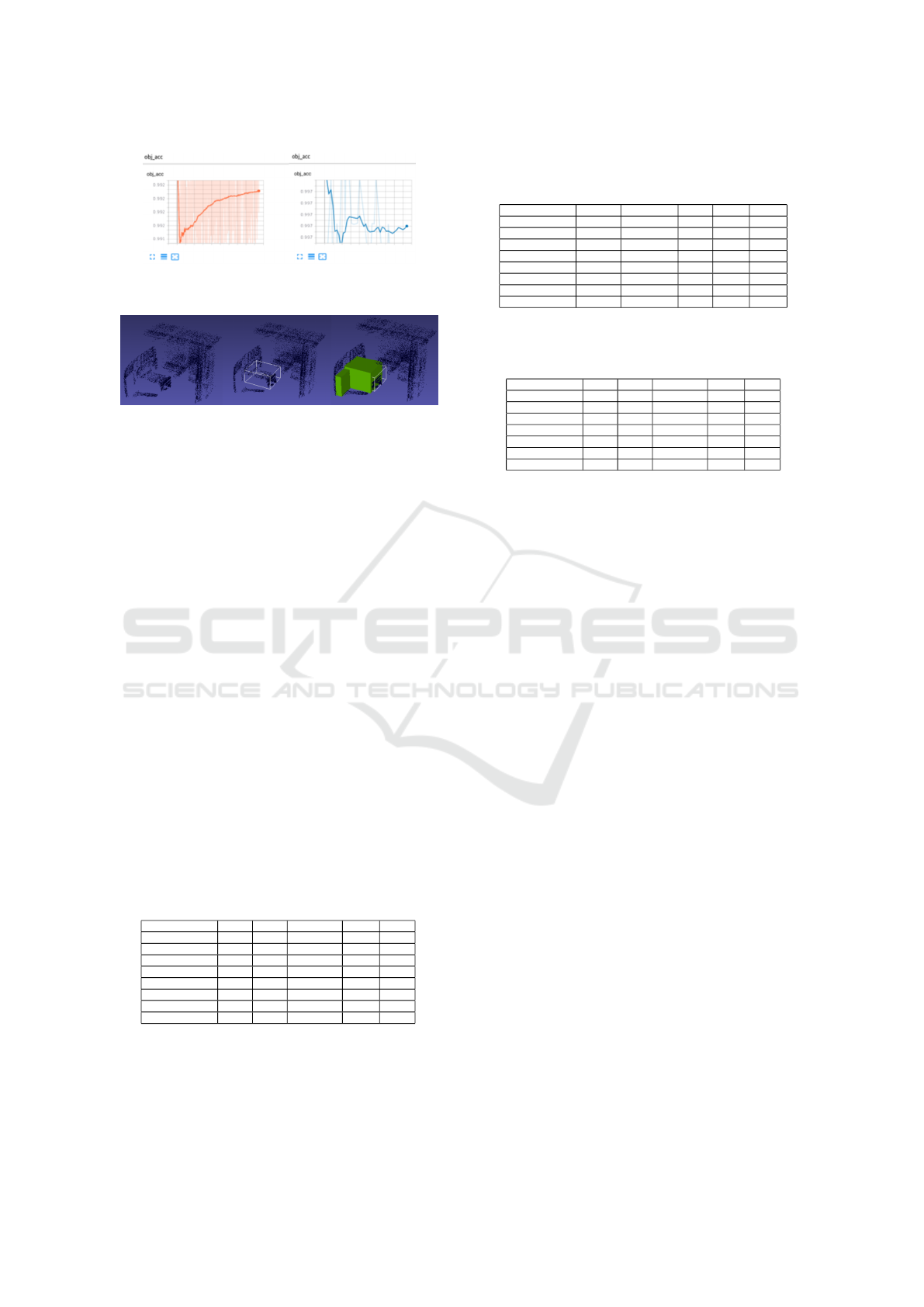
Figure 5: Average Object Accuracy of 99.27% and 99.84%
on SUN RGB-D training and validation datasets.
Figure 6: Input point cloud scene (20k points, Enhanced
VoteNet bounding box prediction, Ground truth comparison
vs prediction.
Enhanced MLCVNet. For the implementation of
this method, we follow the provided instructions of
the MLCVNet paper. This includes the use of a Point-
Net++ backbone with 4 set abstraction layers, 2 fea-
ture propagation layers and three sub-modules (patch-
patch context, object-object context and global-scene
context) to support a multi-level context attention
mechanism for a fair comparison and the use of the
common benchmark SUN RGB-D training and vali-
dation datasets. The integration of the iterative sam-
pling framework method includes the modifying the
SUN RGB-D detection dataset class to include the op-
tion to run MLCVNet with RANSAC iterative sam-
pling. To achieve the results described in Tables 3
and 4 below, we again use 20,000 points as the input
for each point cloud scene. We run 400 epochs with a
batch size of 8 and a learning rate of 0.001 due to time
constraints. Additionally, A key point to note is that
for training we use only geometric information and
no image data for a fair comparison against methods
utilising image data.
Table 5: Mean average precision mAP @ 0.25 En-
hanced MLCVNet comparison against current state-of-the-
art methods on SUN RGB-D v1 validation set - Part 1.
Method bath bed bookshelf chair desk
VoteNet 74.4 93.0 28.8 75.3 22.0
MLVCNet 79.2 85.8 31.9 75.8 26.5
GroupFree3D 80.0 87.8 32.5 79.4 32.6
Ours RANSAC 76.7 79.6 15.6 60.9 9.8
Ours DBSCAN 23.8 74.0 5.6 55.4 7.6
Ours BIRCH 26.5 76.7 4.6 56.4 8.5
Ours KMeans 31.2 76.7 4.6 56.4 8.5
Ours OPTICS 25.6 79.2 12.3 43.9 6.2
Enhanced GroupFree3D. For the implementation
of this method, we follow the provided instructions
of the GroupFree3D paper. This includes the use of
a PointNet++ backbone with 4 set abstraction layers
and 2 feature propagation layers and transformer de-
Table 6: Mean average precision mAP @ 0.25 En-
hanced MLCVNet comparison against current state-of-the-
art methods on SUN RGB-D v1 validation set - Part 2.
Method dresser nightstand sofa table toilet
VoteNet 29.8 62.2 64.0 47.3 90.1
MLVCNet 31.3 61.5 66.3 50.4 89.1
GroupFree3D 36.0 66.7 70.0 53.8 91.1
Ours RANSAC 12.2 35.4 27.4 39.2 95.5
Ours DBSCAN 9.2 23.2 28.0 34.3 86.1
Ours BIRCH 8.6 13.1 21.7 24.0 72.8
Ours KMeans 9.6 26.5 32.1 36.1 87.3
Ours OPTICS 7.8 19.0 25.3 26.1 77.7
Table 7: Mean average precision mAP @ 0.5 En-
hanced MLCVNet comparison against current state-of-the-
art methods on SUN RGB-D v1 validation set - Part 1.
Method bath bed bookshelf chair desk
VoteNet 45.4 53.4 6.8 56.5 5.9
GroupFree3D 64.0 67.1 12.4 62.6 14.5
Ours RANSAC 16.6 32.2 10.0 36.2 3.9
Ours DBSCAN 14.5 29.1 4.7 23.2 4.4
Ours BIRCH 13.9 36.1 2.6 17.5 3.4
Ours KMeans 27.8 31.2 7.1 23.5 29.1
Ours OPTICS 16.5 33.4 3.8 15.9 8.7
coder module to support a multi-head attention mech-
anism for iterative object feature extraction and box
prediction for a fair comparison and the use of the
common benchmark SUN RGB-D training and vali-
dation datasets. The integration of the iterative sam-
pling framework method includes the modifying the
SUN RGB-D detection dataset class to include the
option to run GroupFree3D with RANSAC iterative
sampling. To achieve the results described in Tables 3
and 4 below, we again use 20,000 points as the input
for each point cloud scene. We run 400 epochs with
a batch size of 8 and a learning rate of 0.001 due to
time constraints. A key point to note is that for train-
ing we use only geometric information and no image
data for a fair comparison against methods utilising
image data.
4.2 System Performance
As demonstrated by the experimental results per-
formed for this work, there is significant potential
to further enhance existing state-of-the-art 3D point
cloud object detection methods with the use of it-
erative sampling and clustering methods. Our pro-
posed framework demonstrates improvements on the
state-of-the-art VoteNet and MLCVNet methods for
2 classes in each evaluation run. Due to time con-
straints, our experimental works on clustering meth-
ods and the use of the ScanNet V1 dataset was omit-
ted from this version of the paper. We demonstrate the
success of the evaluated RANSAC iterative sampling
method on the SUN RGB-D validation dataset.
For Enhanced VoteNet, we improve on the state-
of-the-art mAP results for the bath and desk classes @
0.25 with +0.4 and +64.4 respectively. For Enhanced
VoteNet with mAP @ 0.5 we improve on the state-of-
Enhanced 3D Point Cloud Object Detection with Iterative Sampling and Clustering Algorithms
679

Table 8: Mean average precision mAP @ 0.5 En-
hanced MLCVNet comparison against current state-of-the-
art methods on SUN RGB-D v1 validation set - Part 2.
Method dresser nightstand sofa table toilet
VoteNet 12.0 38.6 49.1 21.3 68.5
GroupFree3D 21.9 49.8 58.2 29.2 72.2
Ours RANSAC 7.3 7.0 11.6 8.4 56.2
Ours DBSCAN 5.3 32.8 20.3 13.7 39.9
Ours BIRCH 7.1 37.6 42.5 17.9 11.2
Ours KMeans 8.0 39.6 21.0 14.3 45.1
Ours OPTICS 9.8 40.4 36.8 11.9 28.5
Figure 7: Average Object Accuracy of 99.18% and 99.09%
on SUN RGB-D training and validation datasets.
the-art mAP results for the bookshelf and desk classes
with +1.8 and +41.9. We also demonstrate an object
accuracy of 99.27% during training and 99.84% dur-
ing testing.
For Enhanced MLCVNet, we improve on the
state-of-the-art mAP results again for the desk classes
@ 0.25 with +25.8. For Enhanced MLCVNet with
mAP @ 0.5 we did not achieve any improvements on
the state-of-the-art mAP results for any classes in the
validation dataset. We also demonstrate an object ac-
curacy of 99.18% during training and 99.09% during
testing.
For Enhanced GroupFree 3D, we do not improve
on the state-of-the-art mAP results @ 0.25 or @
0.5. Due to time constraints the number of epochs
for training this model was reduced. We do how-
ever demonstrate an object accuracy of 99.23% dur-
ing training and 99.11% during testing. Overall, it
is clear from the experimental results that the addi-
tion of the iterative sampling method to each of the
current state-of-the-art methods can achieve improved
results due to the filtering of outlier points. However,
it is also clear that this is inconsistent across all object
classes in the SUN RGB-D dataset and will require
future works to fine tune and improve results on other
classes to yield improved results.
5 CONCLUSIONS
In this paper, we propose an iterative sampling and
clustering framework to enhance 3D point cloud ob-
ject detection. For iterative sampling we utilize the
popular RANSAC algorithm which allows for the
filtering out outlier points in the input point cloud.
For clustering, we utilize the DBSCAN, K-means,
Figure 8: Input point cloud scene (20k points, Enhanced
MLCVNet bounding box prediction, Ground truth compar-
ison vs prediction.
Table 9: Mean average precision mAP @ 0.25 Enhanced
GroupFree3D comparison against current state-of-the-art
methods on SUN RGB-D v1 validation set - Part 1.
Method bath bed bookshelf chair desk
VoteNet 74.4 93.0 28.8 75.3 22.0
MLVCNet 79.2 85.8 31.9 75.8 26.5
GroupFree3D 80.0 87.8 32.5 79.4 32.6
Ours RANSAC 30.8 38.9 10.0 35.1 58.4
Ours DBSCAN 29.7 36.6 21.8 33.7 37.2
Ours BIRCH 34.3 44.9 24.7 39.1 40.3
Ours KMeans 31.3 34.6 20.3 35.2 38.1
Ours OPTICS 33.4 43.5 23.1 37.8 39.0
Table 10: Mean average precision mAP @ 0.25 Enhanced
GroupFree3D comparison against current state-of-the-art
methods on SUN RGB-D v1 validation set - Part 2.
Method dresser nightstand sofa table toilet
VoteNet 29.8 62.2 64.0 47.3 90.1
MLVCNet 31.3 61.5 66.3 50.4 89.1
GroupFree3D 36.0 66.7 70.0 53.8 91.1
Ours RANSAC 13.2 11.3 17.9 53.6 49.6
Ours DBSCAN 16.6 22.9 23.5 49.7 50.4
Ours BIRCH 19.8 26.3 19.2 51.0 63.8
Ours KMeans 28.5 32.6 28.1 52.0 51.3
Ours OPTICS 21.8 23.7 19.0 50.5 62.1
Table 11: Mean average precision mAP @ 0.5 Enhanced
GroupFree3D comparison against current state-of-the-art
methods on SUN RGB-D v1 validation set - Part 1.
Method bath bed bookshelf chair desk
VoteNet 45.4 53.4 6.8 56.5 5.9
GroupFree3D 64.0 67.1 12.4 62.6 14.5
Ours RANSAC 38.6 41.3 10.2 51.7 12.9
Ours DBSCAN 32.0 42.4 13.8 37.6 36.4
Ours BIRCH 30.8 38.9 20.0 35.1 58.4
Ours KMeans 34.3 44.9 24.7 39.1 40.3
Ours OPTICS 33.1 40.2 16.4 38.0 41.4
Table 12: Mean average precision mAP @ 0.5 Enhanced
GroupFree3D comparison against current state-of-the-art
methods on SUN RGB-D v1 validation set - Part 2.
Method dresser nightstand sofa table toilet
VoteNet 12.0 38.6 49.1 21.3 68.5
GroupFree3D 21.9 49.8 58.2 29.2 72.2
Ours RANSAC 16.3 21.4 18.6 43.3 51.2
Ours DBSCAN 14.1 20.9 22.3 47.8 55.7
Ours BIRCH 13.2 11.3 17.9 53.6 49.6
Ours KMeans 19.8 26.3 29.2 51.0 63.8
Ours OPTICS 20.2 18.7 21.9 29.0 54.7
BIRCH and OPTICS algorithms which are widely
used for data pre-processing techniques. We evaluate
our framework by integrating to the current state-of-
the-art VoteNet, MLCVNet and GroupFree3D meth-
ods which boast the fastest, most accurate and highest
performing results across the benchmark SUN RGB-
D and ScanNet V2 point cloud datasets.
Through the experimental results demonstrated in
this paper, the RANSAC iterative sampling method
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
680

can be a useful addition to enhance current state-of-
the-art 3D point cloud object detection methods, as
shown with the improvements made on the state-of-
the-art mean average precision values @ 0.25 and
@ 0.5 for some classes. However, along with this,
the experimental results proved that the iterative sam-
pling method caused inconsistency across all classes.
This indicates the limitations of utilizing ou unsuper-
vised iterative sampling and clustering framework on
a dataset of varying classes and object shapes/sizes
demonstrating this may be best suited to applications
with primitive shapes or similar point cloud scenes. In
future works, we plan to further extend and fine tune
the framework to achieve superior results on other
common benchmark datasets.
The results show that Enhanced VoteNet and En-
hanced MLCVNet achieved high object accuracy re-
sults for both training and testing on the benchmark
SUN RGB-D dataset with all runs yielding object ac-
curacy results greater than 99.1% which is promising.
The objective of this work is to evaluate the above
dataset and methods using key considerations of in-
dustrial applications which has not been previously
done for raw point cloud object detection methods.
VoteNet and MLCVNet, which were implemented on
the 3D point cloud dataset, show promising results in
terms of accuracy, computation, and real-time capa-
bility for industrial applications. However, one ad-
ditional consideration which needs further evaluation
is the process of updating the models for new ob-
ject classes, changes in ambient conditions or infras-
tructure in an industrial setting as this is important in
modern real-world applications.
REFERENCES
Saifullahi Aminu Bello, Shangshu Yu, and Cheng
Wang. Review: Deep learning on 3d point clouds. 2020.
Holger Caesar, Varun Bankiti, Alex H. Lang, Sourabh
Vora, Venice Erin Liong, Qiang Xu, Anush Krishnan, Yu
Pan, Giancarlo Baldan, and Oscar Beijbom. nuscenes: A
multimodal dataset for autonomous driving. 2020.
B. Calli, A. Singh, A. Walsman, S. Srinivasa, P. Abbeel,
and A. M. Dollar. The ycb object and model set: Towards
common benchmarks for manipulation research. pages
510–517, 2015.
A. X. Chang, T. Funkhouser, L. Guibas, P. Hanrahan,
Q. Huang, Z. Li, S. Savarese, M. Savva, S. Song, H. Su, J.
Xiao, L. Yi, and F. Yu. Shapenet: An information-rich 3d
model repository. 2015.
Angela Dai, Angel X. Chang, Manolis Savva, Maciej
Halber, Thomas Funkhouser, and Matthias Nießner. Scan-
net: Richly-annotated 3d reconstructions of indoor scenes.
2017.
Bertram Drost, Markus Ulrich, Paul Bergmann, Philipp
Hartinger, and Carsten Steger. Introducing mvtec itodd - a
dataset for 3d object recognition in industry. Oct 2017.
Andreas Geiger, Philip Lenz, Christoph Stiller, and
Raquel Urtasun. Vision meets robotics: The kitti dataset.
2013.
Timo Hackel, N. Savinov, L. Ladicky, Jan D. Wegner,
K. Schindler, and M. Pollefeys. Semantic3d.net: A new
large-scale point cloud classification benchmark. volume
IV-1-W1, pages 91–98, 2017.
S. Hinterstoisser, V. Lepetit, S. Ilic, S. Holzer, G. Brad-
ski, K. Konolige, and N. Navab. Modelbased training, de-
tection and pose estimation of texture-less 3d objects in
heavily cluttered scenes. 2012.
T. Hodan, P. Haluza,
ˇ
S. Obdr
ˇ
z
´
alek, J. Matas, M.
Lourakis, and X. Zabulis. T-less: An rgb-d ˇ dataset for
6d pose estimation of texture-less objects. 2017.
R. Larsen, H. Aanaes, and S. Gudmundsson. Fusion
of stereo vision and time-of-flight imaging for improved 3d
estimation. volume 1, pages 1–9, 2019.
Yangyan Li, Rui Bu, Mingchao Sun, Wei Wu, Xin-
han Di, and Baoquan Chen. Pointcnn: Convolution on x-
transformed points. 2018.
Yongcheng Liu, Bin Fan, Shiming Xiang, and Chun-
hong Pan. Relation-shape convolutional neural network for
point cloud analysis. 2019.
D. Maturana and S. Scherer. Voxnet: A 3d convo-
lutional neural network for real-time object recognition.
pages 922–928, 2015.
Charles R. Oi, Hao Su, Kaichun Mo, and Leonidas J.
Guibas. Pointnet: Deep learning on point sets for 3d classi-
fication and segmentation. Apr 2017.
Charles R. Qi, Li Yi, Hao Su, and Leonidas J. Guibas.
Pointnet++: Deep hierarchical feature learning on point sets
in metric space. 2017.
Charles R. Qi, Or Litany, Kaiming He, and Leonidas J.
Guibas. Deep hough voting for 3d object detection in point
clouds. 2019.
Shuran Song, Samuel P. Lichtenberg, and Jianxiong
Xiao. Sun rgb-d: A rgb-d scene understanding benchmark
suite. pages 567–576, 2015.
Gusi Te, Wei Hu, Zongming Guo, and Amin Zheng.
Rgcnn: Regularized graph cnn for point cloud segmenta-
tion. 2018.
Yue Wang, Yongbin Sun, Ziwei Liu, Sanjay E. Sarma,
Michael M. Bronstein, and Justin M. Solomon. Dynamic
graph cnn for learning on point clouds. Jun 2019.
Z. Wu, S. Song, A. Khosla, F. Yu, L. Zhang, X. Tang,
and J. Xiao. 3d shapenets: A deep representation for volu-
metric shapes. 2015.
Qian Xie, Yu-Kun Lai, Jing Wu, Zhoutao Wang, Yim-
ing Zhang, Kai Xu, and Jun Wang. MLCVNet: Multi-level
contextvotenetfor 3d object detection. 2020.
Ze Liu, Zheng Zhang, Yue Cao, Han Hu, Xin Tong.
Group-Free 3D Object Detection via Transformers. 2021.
Enhanced 3D Point Cloud Object Detection with Iterative Sampling and Clustering Algorithms
681
