
HCP–VR: Training First Responders through a Virtual Reality
Application for Hydrogeological Risk Management
Federico De Lorenzis
a
, Filippo Gabriele Prattic
`
o
b
and Fabrizio Lamberti
c
Politecnico di Torino, Dip. di Automatica e Informatica (DAUIN), Corso Duca degli Abruzzi, 24, 10129 Torino, Italy
Keywords:
Virtual Reality, Training, Assessment, Scaffolding, First Responders, Simulation, Multiplayer.
Abstract:
Training First Responders (FRs) can represent a difficult task due to the need for preparing trainees to face dan-
gerous situations without exposing them to actual risks. VR technology can help overcome these limitations
by offering accurate simulations in which trainees can safely experience critical scenarios while improving
their knowledge and skills about a specific procedure. In this paper, a Virtual Reality Training System (VRTS)
designed to train FRs in the High Capacity Pumping (HCP) procedure is presented. This application aims to
prepare operators through two different training modes (Guided and Evaluated) within a realistic computer-
generated scenario. A user study involving 22 operators from the Civil Protection of Regione Piemonte was
conducted to assess the learning efficacy and the overall quality of the VRTS. Feedback was collected both
via qualitative evaluations and a quiz session on theoretical content. Participants praised the usability of the
application and the overall quality of the training experience. Finally, the scores of the quiz session showed a
knowledge gain associated with the use of the VRTS to train in the considered procedure.
1 INTRODUCTION
When they need to take action, First Responders
(FRs) are required to follow strict guidelines to secure
their and others’ safety, since they often work in life-
threatening situations and operate tools and machines
that can be dangerous in case of misuse. This obser-
vation is particularly true for operators that manage
crises in the event of hydrogeological disasters, who
often are called upon to act when the event is still
ongoing and must use equipment with high pump-
ing capacity that, if used carelessly, can cause victims
among both operators and civilians. It is, therefore,
necessary for FRs to undergo appropriate training that
can prepare them to face high-risk situations.
However, training in the context of the High Ca-
pacity Pumping (HCP) module of Civil Protection can
be difficult. On the one side, operators must be pre-
pared to work in hostile conditions, whereas on the
other side, it is not possible to expose trainees to ac-
tual risks. Training operators using theoretical lessons
neglects the practical skills that are required during
on-field operations. Engaging the trainees in practi-
cal exercises overcome this limitation, but presents a
a
https://orcid.org/0000-0002-2449-9470
b
https://orcid.org/0000-0001-7606-8552
c
https://orcid.org/0000-0001-7703-1372
different set of problems. In particular, the equipment
for these operations includes expensive pumps whose
number is limited; if a pump is deployed for training,
it cannot be readily available in case of an emergency.
If the pump is deployed as a training device for a lim-
ited time, not all the trainees can operate it, leading to
an incomplete training process. Moreover, even if the
equipment is deployed for a sufficient amount of time,
it must still be used in safe conditions to safeguard the
trainees’ health; therefore, the resulting training prac-
tice is just an approximation of a real scenario.
The restrictions above can be addressed by intro-
ducing a Virtual Reality (VR) module as a comple-
ment to the traditional HCP training, since VR tech-
nology can simulate high-risk scenarios without ex-
posing the users to actual dangers, and in particular
immersive VR applications can be used to acquire
the practical skills associated to the considered proce-
dure. In this paper, a VR application for training FRs
is presented. This VR Training System (VRTS) simu-
lates a realistic scenario where the trainees can follow
all the steps of the HCP procedure and use the rela-
tive equipment (pump, tubes, hoses, etc.). The VRTS
offers two different training modes: a Guided (or scaf-
folded) Mode to learn the different steps of the proce-
dure, and an Evaluated Mode to assess the trainee’s
knowledge and practical skills.
De Lorenzis, F., Pratticò, F. and Lamberti, F.
HCP–VR: Training First Responders through a Virtual Reality Application for Hydrogeological Risk Management.
DOI: 10.5220/0011007800003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 2: HUCAPP, pages
273-280
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
273

To evaluate the overall learning value, the attrac-
tiveness and the usability of the developed system, the
application was tested with volunteers from Civil Pro-
tection, and feedback was collected (before and after
the experience) and later analyzed.
The activity was performed in collaboration with
an Italian regional Civil Protection body, involving
in particular several Civil Protection and Forest Fire
Fighting Units of Piedmont Region, Italy and the
Piedmont Region Coordination body of Civil Protec-
tion Volunteering in the context of the PITEM RISK
project (for which Politecnico di Torino has been ap-
pointed as the implementing body for the Piedmont
Region). More specifically, this paper builds on a VR
application developed for the RISK FOR sub-project,
which aims at improving the training of the many ac-
tors involved in the disaster management of the AL-
COTRA region, a territory between Italy and France.
The presented activities, though, fall within the scope
of the RISK ACT sub-project, whose goal is to exploit
the outputs of RISK FOR in real-world use cases such
as the one situated in the considered application.
2 RELATED WORKS
In the last years, the use of VRTSs has seen a great
diffusion in many contexts including academia, med-
ical field (Kaluschke et al., 2018), and industry (P
´
erez
et al., 2019). VRTSs have been especially useful for
training activities that are mainly focused on practical
tasks involving specialized equipment. In such cases,
training can be enhanced by learning experiences that
offer hands-on approaches (Gavish et al., 2015). It
was demonstrated that the use of VR in this type of
learning contexts can be more beneficial with respect
to the use of other types of training tools, such as
printed material or video lessons. In particular, VRTS
are more effective in terms of procedural knowledge
retention and confidence when compared to printed
learning tools (Buttussi and Chittaro, 2021), whereas
they are more efficient in terms of retention of infor-
mation and self-efficacy increment when compared
to non-immersive, video-based trainings (Lovreglio
et al., 2021). Another aspect that contribute to the
diffusion of VRTSs is the fact that VR technology is
particularly suited for the creation of training tools,
mainly due to its ability to simulate (Lateef, 2010)
real scenarios with a high level of accuracy and with-
out exposing users to the corresponding risks. For
example, it is possible to recreate an evacuation sce-
nario in the event of a road tunnel fire (Calandra et al.,
2021), where the users can learn emergency regula-
tions while experiencing a realistic simulation of fire
and smoke.
Based on the above considerations, VRTSs are
particularly useful for the education of FRs or other
operators that must train in practical tasks while work-
ing in dangerous situations. In facts, immersive
VR applications have been largely adopted in risk-
management contexts: for example, to train operators
in the CBRN procedure (Lamberti et al., 2021), or cri-
sis management teams (composed by policemen, fire-
men and doctors) in rescue missions (Conges et al.,
2020).
An additional advantage offered by VRTSs is the
possibility to enhance the training efficacy by includ-
ing automatic guiding and evaluation modules: users
can be trained and evaluated directly by the applica-
tion, therefore the presence of a trainer is not neces-
sary. Regarding the design of these modules, despite
the diffusion of VRTSs there are no standard rules to
follow during the development of a new application.
Nevertheless, it still possible to find general guide-
lines the describes the best design practices in the lit-
erature (Feng et al., 2018). In particular, the most
common solutions for training consist in scaffolding
systems that guide the trainee step-by-step, either us-
ing audio or textual feedback (or a combination of
both). This feedback can consist either of instructions
that describe the next step of the training, or correc-
tion given to the trainee after each task. As for the
assessment of the users’ performance, the adopted so-
lutions are either run-time error signaling or the use of
a final report that can be consulted only at the end of
the VR experience.
To conclude, the present activities build on a
previously published research activity on the use of
simulation-based VR as a mock-up tool for training
experiences (Prattic
`
o et al., 2021). In the above ac-
tivity, a sandbox VR application was used to support
Training Provisioners (TPs) in designing a training
experience, and this approach was compared to a stan-
dard, dramaturgy-based one. In this paper, the feed-
back and the results collected from the TPs are used
to improve that VR application and to implement a
guiding and an evaluation system into it to safely train
operators from Civil Protection.
3 METHODOLOGY
This paper presents a VR-based experience to train
operators from Civil Protection in the HCP procedure.
An existing, sandbox VR application was first im-
proved accordingly to previously collected feedback
from Civil Protection TPs, and later used to build a
VRTS targeted to FRs.
HUCAPP 2022 - 6th International Conference on Human Computer Interaction Theory and Applications
274

3.1 HCP Module and Procedure
The HCP module is a part of the Colonna Mobile
1
of Civil Protection; it consists of a series of vehicles
and teams of operators that must be dispatched in the
event of a hydrogeological crisis. It is described by a
series of general guidelines that define the tools and
the overall procedure to guarantee the interoperabil-
ity of modules from different countries (”Euratom”,
2008). The procedure consists of a series of steps
that the FRs need to follow to operate high-capacity
pumps, drain flooded areas and monitor water levels.
In particular, when a hydrogeological crisis oc-
curs, the FRs must wear the necessary Personal Pro-
tective Equipment (PPE), then approach and inspect
the deluged ground; this first phase aims to assess the
situation and identify the area that must be drained
(aspiration area, generally a puddle) and the delivery
area (e.g., a river) where the water can be discharged.
The operators must then place the pump near the as-
piration area, in a feasible location for the pumping
activities: the placement must consider the character-
istics of the pump (capacity, power) and the environ-
ment (height, obstacles) since they all contribute to
the success of the operation. In case of a wrong place-
ment (e.g., too far from the aspiration area), the pump
will fail to move the water.
Once the pump is correctly placed, the operators
must delimit the operational field and start assembling
the aspiration and delivery chains using rigid or semi-
rigid tubes and, for the latter, also foldable hoses.
The two chains must be connected to the pump and
directed to the aspiration and delivery areas, respec-
tively. The aspiration chain must end with a filter that
shall be submerged in the flooded area. The operator
that places the filter must wear additional PPE (a life
vest secured with a safety rope) to limit the chances
of drowning. The delivery chain must end with a rigid
tube anchored to the ground near the delivery loca-
tion. If the delivery area is another river, a protective
sheet must be used to protect its bank.
Once the above steps have been completed, the
operators can start the pumping procedure and wait
for its completion. During this phase, they must mon-
itor the pumping activities to assess the state of the
aspiration and delivery chains and detect possible wa-
ter leakings. If leaking is detected, the procedure must
be stopped and the tubes repaired or substituted. The
operations terminate when all the water is removed
from the aspiration area.
1
https://www.regione.piemonte.it/web/temi/protezione-
civile-difesa-suolo-opere-pubbliche/protezione-
civile/logistica/colonna-mobile-regionale
3.2 VR Application
The application was developed for immersive VR
Head-Mounted Displays (HMDs) like Vive Pro
2
and
Oculus Quest 2
3
, and the bundled hand controllers
were used to interact with the Virtual Environment
(VE). The system was implemented using Unity
4
, and
the VR component was handled using the SteamVR
framework. The 3D assets were created using Unity
(for the VE), Blender
5
(for the tools, the pump, the
vehicles, and the characters), and image-editing soft-
ware (for the textures).The logic and algorithms con-
trolling the virtual 3D objects were wirtten in the C#
programming language.
The application was initially designed as a sand-
box experience where the users can freely interact
with the tools used in the HCP procedure. The VE
was modeled as a realistic deluged area between two
rivers, near a forest but easily accessible by vehicles
(Fig. 1). The behavior of the equipment was based
on the HCP guidelines, manuals, and empirical ob-
servations collected during Civil Protection real ex-
ercises. For instance, the pump was implemented to
simulate all the necessary steps for the pumping pro-
cedure, using the instruction manual as a reference.
The users can interact with all the doors and valves
and start the pumping procedure by interacting with
the control panel. Moreover, audio feedback was used
to enhance realism and replicate the noise of the en-
gine, and a particle effect was exploited to simulate
the water ejected at the end of the delivery chain.
Figure 1: The fictional environment used in the VRTS. It
is a realistic reconstruction of a deluged area between two
rivers that can be accessed easily by vehicles.
Particular care was also dedicated to the simula-
tion of the aspiration and delivery chains. Rigid tubes
were implemented as single 3D objects; semi-rigid
2
https://www.vive.com/us/product/vive-pro-starter-kit/
3
https://www.oculus.com/quest-2/
4
https://www.unity.com/
5
https://www.blender.org/
HCP–VR: Training First Responders through a Virtual Reality Application for Hydrogeological Risk Management
275

tubes and foldable hoses were handled instead as cou-
ples of different 3D elements (the end-points) con-
nected by a third element simulating the realistic be-
havior of the tube/hose itself. Regardless of the type
and the implementation, all the tubes can be assem-
bled to build the aspiration or delivery chains and can
be connected directly to the pump.
Although the user can interact with every 3D el-
ement (with the help of visual cues highlighting the
objects during the interaction), the experience can
change depending on how it is configured. In partic-
ular, the user can choose a particular task (delimiting
the operational field, assembly of the delivery or the
aspiration chain, etc.) to activate only a subset of 3D
objects. When the chosen task requires more than one
operator, Non-Player Characters (NPCs) can help the
user (e.g., to transport the tubes). The NPCs were im-
plemented using an event-based approach and finite-
state machines. Furthermore, voice-overs were added
to the NPCs to give the general context to the users.
3.3 Improvements
As mentioned above, feedback collected during a pre-
vious study (Prattic
`
o et al., 2021) was used to improve
the usability and the realism of the existing applica-
tion. In particular:
• two training modes were added to the application
in order to train operators in the HCP procedure;
• the overall graphics quality of the VE was im-
proved by substituting the tree models with new
ones without billboarding effects;
• the behavior of the NPCs was modified to im-
prove the realism; some of the animations were
changed, and the parameters managing the inverse
kinematics were tuned to obtain more accurate
and esthetically-pleasing results;
• the user’s hands (previously static models holding
the 3D geometries of the HMD controllers) were
substituted with animated hands to enhance the re-
alism and the user’s sense of immersion;
• the tubes’ and hoses’ logic was changed in order
to improve the assembly interaction and the over-
all behavior (in particular the effect of gravity on
the tubes’ endpoints);
• the audio effect associated to the pump was
changed and its intensity was linked to the pump’s
doors (closing a door reduces the volume);
• a multiplayer version of the VR application was
developed to train multiple users at the same time;
in this version, two operators can work together
(Fig. 2) inside the same simulation to complete
the procedure, helping each other in assembling
the aspiration and delivery chains and in the man-
agement of the pump.
(a) (b)
Figure 2: Two operators working together in the multiplayer
version of the application: they meet and communicate at
the beginning of the simulation (a), and assemble the deliv-
ery chain, connecting a semi-rigid tube to the pump (b).
3.4 Training Modes
The results obtained in the previous study (Prattic
`
o
et al., 2021) were used to design and add two different
training modes to the existing sandbox application: a
Guided Mode (GM) and an Evaluated Mode (EM). In
particular, feedback from the TPs was used to define:
• the correct order of operations to complete the
procedure;
• the guidelines to ensure the operators’ safety;
• the theoretical content to be delivered during the
training.
The main goal of the GM is to instruct the trainees
to complete the HCP procedure, focusing not only on
the order of the operations but also on the reason be-
hind each action. In this mode, the whole procedure
is divided into micro-tasks (e.g., “take the protective
sheet and place it”), and the trainee is guided through
them by a scaffolding system using voice-overs, high-
lights and icons (Fig. 3). The voice-over is diegetic,
and it is inserted in the scene as a radio communica-
tion from the leader of the operators. For each micro-
task, the voice-over describes the necessary actions
to complete it, while the highlights point out all the
elements mentioned by the voice-over. If the trainee
successfully complete the micro-task, the voice-over
describes the next step and the procedure continues.
If the trainee fails (e.g., he or she makes a mistake),
the voice-over signals the error and describes a pos-
sible correction. At any moment, it is possible to re-
peat the last instruction described by the voice-over
by pressing a button on the hand controllers. The GM
ends when the trainee successfully complete the last
micro-task. Similarly to the original sandbox applica-
tion, it is possible to be guided through the whole pro-
HUCAPP 2022 - 6th International Conference on Human Computer Interaction Theory and Applications
276

cedure or through a subset of micro-tasks (e.g., only
the assembly of the delivery chain).
(a) (b)
Figure 3: Highlights and icons used in the GM to guide
the trainees in the HCP procedure. In (a), the blue and red
highlights point out the endpoints of a semi-rigid tube to
explain how to assemble the aspiration chain; in (b), the
highlights describe where to place the pump.
In the EM, there is no guiding system and the
trainee is free to interact with all the 3D objects. Mis-
takes are not signaled (the only feedback is the behav-
ior of the pump and the other objects in the scene), but
the trainee can undo the actions performed previously
and correct errors (if he or she notices them). An eval-
uation module keeps track of the trainee’s actions and
produces a report at the end of the simulation. This
report aims to highlight incorrect actions (e.g., “You
forgot to wear the PPE”) and give an overall evalua-
tion on the user’s performance. This training mode is
designed to be used multiple times to gradually im-
prove the user’s performance until no error is made.
4 EXPERIMENTS
In order to assess the overall quality of the developed
VRTS (learning effectiveness, potential as a learning
tool, usability, attractiveness), a user study was con-
ducted with 22 subjects from the Civil Protection of
Piedmont Region. The participants came from differ-
ent cities – therefore, from different Civil Protection
sites/units – and their knowledge of the HCP proce-
dure varied (some participants were unfamiliar with
the procedure, other claimed to have previous knowl-
edge on the topic). None of the subjects had previous
experience with immersive VR applications. The age
ranged from 30 to 73 years (µ = 55.38, σ = 9.69).
4.1 User Study
In the user study, the participants were asked to fill in
a questionnaire and take a quiz on the HCP procedure
to collect background information and assess previ-
ous knowledge of the procedure. Afterwards, each
subject was asked to experience the VRTS in GM to
train in the HCP procedure, and was also offered the
possibility to use the EM to get a a feedback on the
performance (Fig. 4). All the experiments were con-
ducted using the single player version of the VRTS.
Finally, the subjects were asked to take the same quiz
used before the experience to assess the knowledge
gain associated with the use of the VRTS, as well as
to fill in a second part of the questionnaire evaluating
the whole experience and collecting general feedback
and possible suggestions for future improvements.
(a) (b)
Figure 4: An operator from Civil Protection using the
VRTS. In (a), the operator is placing the pump; in (b), the
operator is assembling the aspiration chain.
The quiz used in this study consisted in a series of
multiple-choice questions and one open-ended ques-
tion. The multiple-choice questions concerned proce-
dural details like:
• where to place the pump;
• how to use the PPE;
• how to operate the pump’s valves;
• how to operate the pump during the pumping pro-
cedure;
• how to secure the operational field;
• how to assemble the delivery and aspiration
chains.
The open-ended question, instead, concerned the
whole procedure and asked to briefly describe the fi-
nal goal of the HCP module.
The questionnaire administrated to the partici-
pants was composed of several sections to investigate
different aspect of the training experience and the de-
veloped VRTS. In particular:
• the first section encompassed general questions
on the participant’s background (experience with
Civil Protection, with the HCP procedure, and
with immersive VR applications or video-games);
• the second section consisted of the Instructional
Materials Motivation Survey (Keller, 2010), or
IMMS. This section is composed of 36 statements
HCP–VR: Training First Responders through a Virtual Reality Application for Hydrogeological Risk Management
277

to be scored on a 1-to-5 scale (with one corre-
sponding to “not true” and five to “very true”) to
evaluate the participant’s motivations at learning
the HCP procedure. The statements considered
in this section can be grouped in four categories
(attention, confidence, relevance, and satisfaction)
and their scores can be used to get an evaluation
for each category.
• the third section consisted of a subset of the At-
trakDiff questionnaire (Hassenzahl et al., 2008)
to evaluate the Attractiveness (ATT) and Hedo-
nic Quality Stimulation (HQ-S) of the experience
(Jost et al., 2020). In particular, this section eval-
uated the training experience using 14 pairs of
terms to which the participants were asked to as-
sign a value on a 1-to-7 scale.
• the fourth section aimed to evaluate the general
usability of the VRTS and was based on the Sys-
tem Usability Scale (SUS) (Brooke, 1996). It con-
sisted of 10 statements to be scored on a 1-to-5
scale (with one corresponding to “total disagree-
ment” and five to “total agreement”).
• finally, the fifth section encompassed general
questions on the whole training experience, the
behavior of the NPCs, and the satisfaction and
confidence of the participant.
4.2 Results
The collected results were used to evaluate the train-
ing experience. In particular, the questionnaire was
used to get a subjective estimation of the characteris-
tics of the training and the developed VRTS, whereas
the quiz session provided an objective evaluation of
the knowledge gain. There were no significant differ-
ences between subjects with previous knowledge of
the HCP procedure and subjects with no experience
on the topic.
Starting with the subjective evaluation, the results
on motivations at learning (IMMS) are reported in
Fig. 5. As it can be seen, the training experience
managed to hold the trainees’ attention during the
study and was considered as satisfying. The partic-
ipants judged the experience as relevant, and consid-
ering the total score they were motivated to complete
the training. Looking at the individual answers of the
IMMS questionnaire, the attractiveness of the tackled
topic (the HCP procedure) and the quality of the in-
formation provided by the VRTS helped the trainees
to remain focused during the experience, hence the
high score assigned to the attention category. Regard-
ing the relevance category, its score can be linked
to the usefulness of the topic, together with the fi-
delity of the simulation and the organization of vir-
tual training. Finally, considering the confidence cat-
egory, even though the trainees were overall confident
about their knowledge at the end of the experience and
praised the organization of the provided content, they
pointed out that at, the beginning, they were unsure
about the effectiveness of a VR training, hence the
lower score.
Figure 5: Results collected through the IMMS question-
naire; the plot reports the results for each of the grouped
category (attention, satisfaction, relevance, confidence, to-
tal) as well as the total score.
As for the results of the AttrakDiff questionnaire,
they are showed in Fig. 6. The training received
low scores for each pair of terms proposed by the
questionnaire, which means that the experience was
judged to be positive both in terms of attractive-
ness and hedonic quality stimulation. In particular,
it was praised for being innovative and for the nov-
elty of the chosen approach, whereas the higher score
assigned to the “bold/cautious” and the “challeng-
ing/undemanding” pairs are probably linked to the
fact that the structure of the training experience was
similar to that of “standard” (non-VR) HCP training.
Moreover, the developed VRTS was tested us-
ing the SUS questionnaire, and the results showed
that the usability was judged to be good (µ = 75.95,
σ = 12.96) overall. The participants praised the func-
tionality offered by the system, though some of them
weren’t sure if they could use the application without
a technician’s support (this outcome could be due by
the fact that the subjects had no previous experience
with VR applications or video-games).
Finally, regarding the objective evaluation, the re-
sults collected in the quiz session are given in Fig. 7.
The multiple-choice questions were marked on a 0-
to-6 scale, with one point assigned to each procedural
detail being investigated. Considering the score ob-
tained before and after the experience, a significative
increment was observed (3.13 before vs 4.04 after,
p = 0.02), indicating a knowledge gain associated to
HUCAPP 2022 - 6th International Conference on Human Computer Interaction Theory and Applications
278
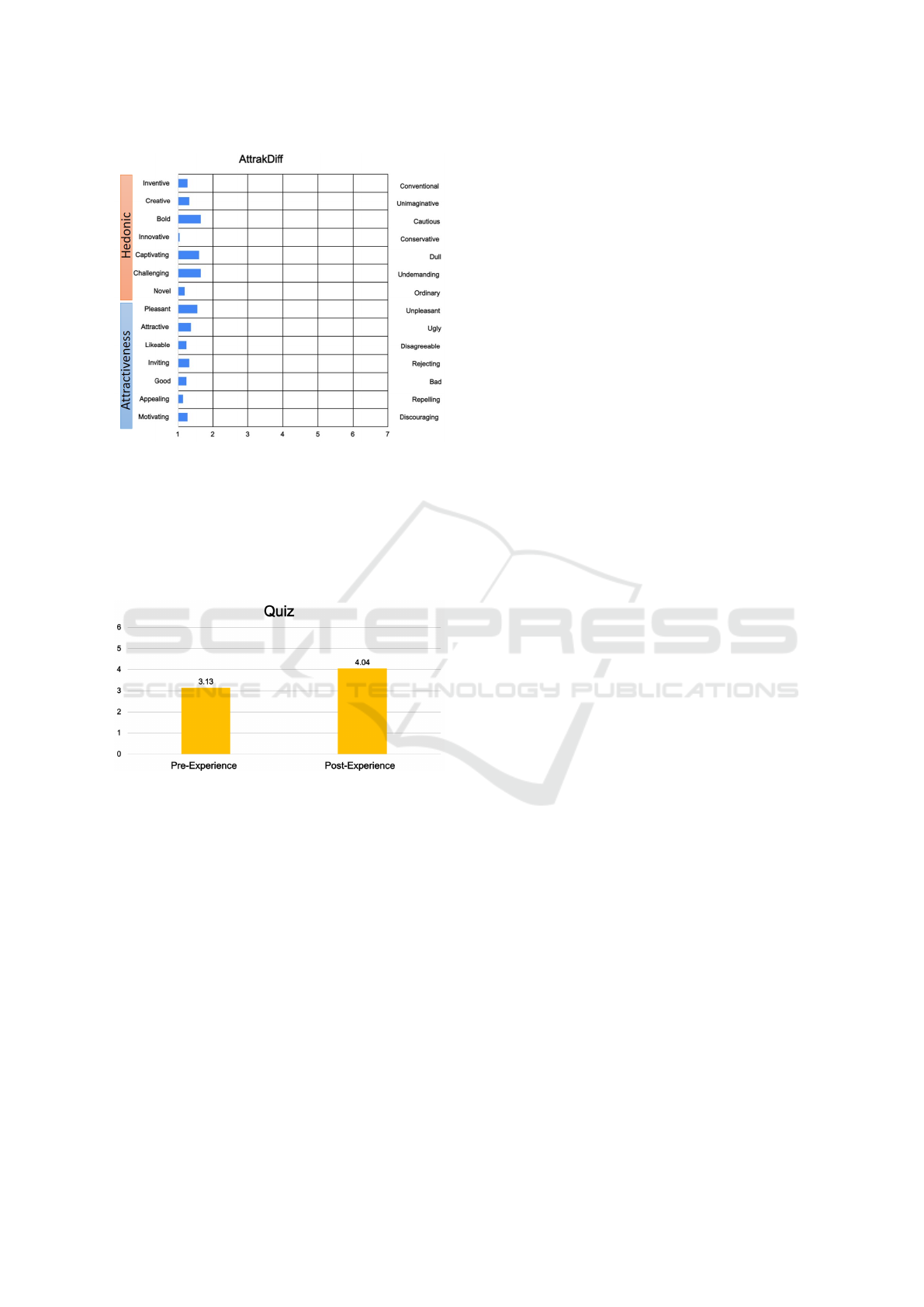
Figure 6: Results collected through the AttrakDiff question-
naire.
the training experience. The open-ended question was
not scored, but it was observed that after the training
the participants were able to describe the HCP pro-
cedure and the aim of the HCP module with higher
accuracy.
Figure 7: Results of the quiz session: the left column
refers to the questions administered before the training ex-
perience, whereas the right column summarizes the post-
experience ouctomes.
5 CONCLUSIONS
This paper presented a VRTS developed as a follow-
up to a previous study and designed as a tool for
training FRs in the HCP procedure. The applica-
tion was developed to overcome the limitations of the
standard training. In facts, VR technology can offer
detailed and accurate simulations of potentially life-
threatening scenarios where users can train without
incurring in actual risks. In particular, the developed
application simulated a scenario where FRs must act
in the event of an hydrogeological crisis: using a high-
capacity pump, the operators must drain a deluged
area while respecting all the safety regulations. The
VRTS offered two different training modes to train in
the procedure and assess the trainees’ knowledge.
To assess the VRTS, a user study was conducted.
Operators from Civil Protection were asked to expe-
rience the application, and questionnaires were used
together with theoretical quizzes to evaluate the over-
all quality and the efficacy of the developed training
tool. The results showed that the participants appreci-
ated the training experience in terms of usability, at-
tractiveness and hedonic quality. They showed also
that the participants were able to maintain a high level
of attention, and that the learning experience was con-
sidered to be satisfying and relevant. Finally, the ob-
jective results collected with the quizzes showed a sig-
nificative learning gain associated to the learning ex-
perience, regardless of trainees’ previous knowledge
on the subject matter (the HCP procedure).
The study also highlighted some limitations. In
particular, a participant pointed out the necessity to
use this VRTS as a complementary module to the
standard training (which is the currently intended
use), and not in substitution, citing the differences be-
tween the 3D objects and the real, heavy equipment
as one of the reasons. Other limitations concerned the
fact that, at this moment, it is possible to train in only
one virtual scenario, and the overall dullness of the
NPCs.
Possible future developments include overcoming
the above limitations. In particular, a possibility could
be to add different scenarios with different character-
istics (an urban one, or one with different height lev-
els) to the VRTS. Another extension could concern
improving the NPCs’ behavior by adding the possi-
bility to control them using the voice to enhance the
overall realism of the experience. Finally, a possible
extension to this study could consist in using the mul-
tiplayer mode to train operators and analyze the im-
pact of collaboration on the effectiveness of the train-
ing.
ACKNOWLEDGEMENTS
The authors want to thank Luca Cavallini, Nicol
`
o
Massobrio and Gisella Vignola for their contribution
to the development of the original VR scenario. They
also want to acknowledge the support provided by
the Civil Protection and Forest Fire Fighting Units of
Piedmont Region, Italy and the Piedmont Region Co-
ordination body of Civil Protection Volunteering g in
the design and validation phase. The activities de-
scribed in this paper were conducted in the context
of the PITEM RISK project and fall within the scope
HCP–VR: Training First Responders through a Virtual Reality Application for Hydrogeological Risk Management
279

of the Interreg V-A Francia-Italia ALCOTRA PITEM
RISK ACT (4980) sub-project.
REFERENCES
Brooke, J. (1996). SUS: A ‘quick and dirty’ usability scale.
Usability Evaluation in Industry, page 189.
Buttussi, F. and Chittaro, L. (2021). A comparison of proce-
dural safety training in three conditions: Virtual real-
ity headset, smartphone, and printed materials. IEEE
Transactions on Learning Technologies, 14(1):1–15.
Calandra, D., Prattic
`
o, F. G., Migliorini, M., Verda, V., and
Lamberti, F. (2021). A multi-role, multi-user, multi-
technology virtual reality-based road tunnel fire sim-
ulator for training purposes. In Proc. of 16th Interna-
tional Conference on Computer Graphics Theory and
Applications (GRAPP 2021), pages 96–105.
Conges, A., Evain, A., Benaben, F., Chabiron, O., and Re-
biere, S. (2020). Crisis management exercises in vir-
tual reality. In 2020 IEEE Conference on Virtual Real-
ity and 3D User Interfaces Abstracts and Workshops
(VRW), pages 87–92. IEEE.
”Euratom” (2008). 2008/73/ec,euratom: Commission
decision of 20 december 2007 amending decision
2004/277/ec, euratom as regards rules for the imple-
mentation of council decision 2007/779/ec, euratom
establishing a community civil protection mechanism.
OJ, L 20:23–34.
Feng, Z., Gonz
´
alez, V. A., Amor, R., Lovreglio, R., and
Cabrera-Guerrero, G. (2018). Immersive virtual real-
ity serious games for evacuation training and research:
A systematic literature review. Computers & Educa-
tion, 127:252–266.
Gavish, N., Guti
´
errez, T., Webel, S., Rodr
´
ıguez, J., Peveri,
M., Bockholt, U., and Tecchia, F. (2015). Evaluating
virtual reality and augmented reality training for in-
dustrial maintenance and assembly tasks. Interactive
Learning Environments, 23(6):778–798.
Hassenzahl, M., Koller, F., and Burmester, M. (2008). Der
user experience (UX) auf der spur: Zum einsatz von
www.attrakdiff.de. In Brau, H., Diefenbach, S., Has-
senzahl, M., Koller, F., Peissner, M., and R
¨
ose, K.,
editors, Tagungsband UP08, pages 78–82, Stuttgart.
Fraunhofer Verlag.
Jost, P., Cobb, S., and H
¨
ammerle, I. (2020). Reality-based
interaction affecting mental workload in virtual reality
mental arithmetic training. Behaviour & Information
Technology, 39(10):1062–1078.
Kaluschke, M., Weller, R., Zachmann, G., Pelliccia, L.,
Lorenz, M., Klimant, P., Knopp, S., Atze, J. P. G., and
M
´
ockel, F. (2018). Hips - a virtual reality hip prosthe-
sis implantation simulator. In 2018 IEEE Conference
on Virtual Reality and 3D User Interfaces (VR), pages
591–592.
Keller, J. (2010). Motivational Design for Learning and
Performance: The ARCS Model Approach. Springer.
Lamberti, F., De Lorenzis, F., Prattic
`
o, F. G., and Miglior-
ini, M. (2021). An immersive virtual reality platform
for training CBRN operators. In Proc. of 2021 IEEE
45th Annual Computers, Software, and Applications
Conference (COMPSAC), pages 133–137.
Lateef, F. (2010). Simulation-based learning: Just like the
real thing. Journal of emergencies, trauma, and shock,
3:348–52.
Lovreglio, R., Duan, X., Rahouti, A., Phipps, R., and Nils-
son, D. (2021). Comparing the effectiveness of fire
extinguisher virtual reality and video training. Virtual
Reality, 25(1):133–145.
P
´
erez, L., Diez, E., Usamentiaga, R., and Garc
´
ıa, D. F.
(2019). Industrial robot control and operator training
using virtual reality interfaces. Computers in Industry,
109:114–120.
Prattic
`
o, F. G., De Lorenzis, F., Calandra, D., Cannav
`
o,
A., and Lamberti, F. (2021). Exploring simulation-
based virtual reality as a mock-up tool to support the
design of first responders training. Applied Sciences,
11(16):1–13.
HUCAPP 2022 - 6th International Conference on Human Computer Interaction Theory and Applications
280
