
Application of Data-driven Deep Learning Model in Global
Precipitation Forecasting
Wan Liu
1,2
and Yongqiang Wang
1,2
1
Changjiang River Scientific Research Institute of Changjiang Water Resources Commission,
23 Huangpu Street, Wuhan, China
2
Hubei Provincial Key Laboratory of Basin Water Resources and Ecological Environment,
23 Huangpu Street, Wuhan, China
Keywords: Precipitation Forecasting, Deep Learning, ConvLSTM, ConvGRU.
Abstract: With the improvement of data acquisition ability and the rapid increase of computer storage capacity and
transmission rate, it is possible to solve the problem of precipitation prediction by using big data and deep
learning. In this paper, the three most advanced deep learning models, namely Convolution model,
ConvLSTM model and ConvGRU model, are applied to the study of precipitation prediction, and analyze the
prediction ability of this method for global short-term precipitation. The experimental results show that the
deep learning method can effectively predict global precipitation, and the correlation coefficient of
precipitation prediction for the next 6 h is more than 0.75. The performance of convolution model is better
when the prediction period is less than 12 h, Otherwise ConvLSTM model and ConvGRU model are more
efficient. However, it is difficult to predict precipitation over northern Africa, the west coast of South
America, the eastern coast of the South Pacific and the South Atlantic.
1 INTRODUCTION
Precipitation has a great impact on human production
and social development. In addition, precipitation is
an important part of water resources ecosystem, and
plays an important role in hydrology, meteorology,
and other aspects. Short-term heavy rainfall is prone
to flood, mudslides, urban waterlogging, and other
disasters, resulting in casualties and property losses.
Therefore, it is of great significance to forecast
precipitation, especially extreme rainfall.
Precipitation is the result of the interaction of multi-
scale air system, which is affected by a variety of
environmental factors. These complex physical
mechanisms make it very difficult to predict
precipitation (Tran, 2019, Song, 2019). At present,
numerical model prediction (Simonin, et al., 2017,
Bauer, et al., 2015) and echo extrapolation (Wang, et
al., 2013, Ayzel, et al., 2019b) are the most
commonly used methods in precipitation prediction.
However, both have certain limitations for short-term
forecasting (Bližňák, et al., 2017). Therefore, due to
the complex dynamic changes of the atmosphere and
the real-time requirements of short-term precipitation
forecast, large-scale and high-precision forecast
models are urgently needed, which poses great
challenges to the fields of meteorology and
hydrology.
With the development of satellite and radar
detection technology, a mass of earth system data can
be obtained. Meanwhile, the rapid increase of
computer storage capacity and transmission rate
makes it possible to use big data and deep learning to
solve the problem of short impending precipitation
prediction (Song, et al., 2019, Su, et al., 2020, Qiu, et
al., 2017). As a kind of nonlinear mathematical model
driven by data, deep learning technology has
excellent feature learning ability (Reichstein, et al.,
2019). It can automatically learn massive data,
consequently mine the inherent characteristics of data
and the inherent physical laws. For the complex
spatio-temporal dynamic system, without a complete
understanding of its internal mechanism, the
nonlinear characteristics of the complex atmospheric
can be characterized by learning historical data
through machine learning method even without using
the mathematical and physical equations controlling
the atmosphere. In recent years, artificial intelligence
technology represented by deep learning has made
major breakthroughs in image recognition,
318
Liu, W. and Wang, Y.
Application of Data-driven Deep Learning Model in Global Precipitation Forecasting.
DOI: 10.5220/0011176400003440
In Proceedings of the International Conference on Big Data Economy and Digital Management (BDEDM 2022), pages 318-324
ISBN: 978-989-758-593-7
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

nowcasting and other fields, and even surpassed the
level of human intelligence in some tasks (LeCun, et
al., 2015).
Precipitation forecast can be regarded as a spatio-
temporal series prediction problem, which is to
predict the spatial distribution of precipitation in the
future on the premise of knowing the continuous
spatial distribution of some variables in the past
period (Shi, et al., 2015). Therefore, Recurrent neural
network (RNN) (Wang, et al., 2021) which is good at
learning temporal features of data, and Convolutional
neural network (CNN) (Ayzel, et al., 2019a) which is
good at extracting spatial features of data, are often
used to study short-term precipitation forecast. (Klein
et al., 2015) present Dynamic Convolutional Layer,
which is a generalization of convolutional layer, and
apply it to short range weather prediction. (Wang, et
al. 2018) proposed a Memory in Memory (MIM)
network for precipitation nowcasting. (Shi, et al.,
2015) combined CNN and RNN for the first time and
proposed a convolutional long short-term memory
(ConvLSTM) model to perform precipitation
nowcasting. Subsequently, (Shi, et al., 2017) further
proposed Trajectory Gated Recurrent Unit
(TrajGRU) model, which is more effective than
Convolutional Gated Recurrent Unit (ConvGRU)
(Ballas et al., 2015) in capturing temporal and spatial
correlation. (Tian, et al., 2020) proposed a generative
adversarial ConvGRU (GA-ConvGRU) model,
which significantly outperforms ConvGRU.
In this work, we apply the deep learning model to
the precipitation prediction project, using the most
advanced convolution model, ConvLSTM model and
ConvGRU model to achieve global precipitation
forecast. Analyse and compare the advantages and
disadvantages of the three models, and test their
forecasting ability in different regions of the world.
2 MATERIALS AND METHODS
2.1 Data Collection and Pre-processing
The data used in this study are NCEP FNL
Operational Global Analysis Data from 2015-2021,
which is a global reanalysis data jointly produced by
National Center for Environmental Prediction
(NCEP) and National Center for Atmospheric
Research (NCAR). These data are from the Global
Data Assimilation System (GDAS), which
continuously collects observational data from the
Global Telecommunications System (GTS), and
other sources, for many analyses. These data are on
1-degree by 1-degree grids prepared operationally
every six hours.
We selected four meteorological variables
associated with precipitation as predictors of the
model, which are relative humidity (x
1
), temperature
(x
2
), radial wind speed (x
3
) and zonal wind speed (x
4
)
at 500 hPa height. Precipitation systems are often
controlled by weather systems of 500 hPa. Relative
humidity represents the moisture content of the
precipitation system and is the most basic condition
for the occurrence of precipitation. Temperature
affects the internal energy of a precipitation system.
Radial wind speed and zonal wind speed affects the
direction and speed of precipitation system
movement.
Data preprocessing is required for the predictors
to be able to enter the model and predict precipitation
effectively. Firstly, to save the training and prediction
time of the model, the spatial resolution of the data
including the predictors and precipitation data was
compressed to 2 degrees. As the units and orders of
magnitude of each predictor are different, data need
to be normalized to achieve a unified dimension,
cancel the difference of orders of magnitude between
data, and avoid large network prediction errors
caused by large difference of orders of magnitude
between input and output data. One of the most
commonly used data normalization methods is min-
max normalization. It standardizes the data to
between 0 and 1. The normalization formula of min-
max is as follows:
*
min
max min
xx
x
x
x
−
=
−
(1)
Where, x represents a value in the sequence of
primitive variables, x* represents the normalized
value of x, x
max
and x
min
represent the maximum and
minimum values in variables, respectively.
Subsequently, all predictors at the same time were
spliced together to form a tensor X with a size of (90,
180, 4). Data were sampled according to the time
sequence to obtain the input samples {X
t-7
, …, X
t-1
,
X
t
} at time t, where X
t-1
and X
t
are a group of
predictors with a time interval of 6 hours. Similarly,
sample output {Y
t
, Y
t+1
, Y
t+2
, Y
t+3
} corresponding to
sample input at time t can be obtained, where Y
t
is the
precipitation in the next 6 hours starting from time t.
2.2 Deep Learning Model for
Precipitation Forecasting
Deep learning methods for precipitation forecasting
usually need to consider the temporal and spatial
Application of Data-driven Deep Learning Model in Global Precipitation Forecasting
319

correlation of data, therefore the commonly used
models are Convolution model, ConvLSTM model
and ConvGRU model. From the spatial viewpoint, P
observations of weather system at same time over a
spatial region with an M × N grid can be treated as a
tensor x∈R
P×M×N
. From the temporal viewpoint, a
sequence of tensors x
1
, x
2
, ..., x
t
can be obtained by
collecting observations at fixed time intervals over
time. Thus, this precipitation nowcasting problem can
be illustrated as:
()
...
,..., ... ...
ttL
ttL
ttLt-K+1 t
Y, ,Y
Y = argmax p Y , ,Y X , XY,
+
+
+
∣
(2)
Where, {X
t-K+1
, ..., X
t
} is the historical observation
sequence data of length K, and {Y
t
, ..., Y
t+L
} is the
predicted precipitation sequence data of length L in
the future.
For Convolution model, since the 2D convolution
model cannot capture the information on the time
sequence well, the 3D convolution model is adopted.
Model regards the time dimension as the third
dimension and forms a cube by stacking multiple
consecutive frames to calculate the 3D convolution in
the cube. The 3D convolution formula is as follows:
()YWXb
σ
=∗+
(3)
Where,
σ
represents the Sigmoid activation
function, W represents the convolution kernel, *
represents the convolution operator, and b represents
the offset.
ConvLSTM model, Shi et al proposed, combines
convolutional neural network with LSTM to
determine the future state of a cell by its adjacent
input units and past states. The input in LSTM model
is extended to three dimensions, and the state-to-state
and input-to-state are realized by convolution layer.
The calculation formula of ConvLSTM is as follows:
11
11
11
11
()
()
()
tanh( )
tanh( )
txithitciti
txfthftcftf
txothotcoto
ttt t xct hct c
tt t
iWxWhWcb
fWxWhWcb
oWxWhWcb
cfc i WxWh b
ho c
σ
σ
σ
−−
−−
−−
−−
=∗+∗+ +
=∗+∗+ +
=∗+∗+ +
=+ ∗+∗+
=
(4)
Where, x
t
, h
t
and c
t
represent the inputs, hidden
states, and unit outputs respectively, i
t
, f
t
and o
t
represent the three gate controls, and ° represents the
Hadamard product.
ConvGRU network is ConvLSTM network
variant. ConvGRU has fewer parameters and faster
training convergence time than ConvLSTM, because
ConvGRU controls the information flow and
removes the memory unit by two gates, the update
and reset gates, while ConvLSTM has three gates.
The main formulas are given as follows:
()
()
()
()
()
1
'
-1
-1
-1
-
'
**
**
**
1-
txzthzt
txrthrt
txhtthht
ttttt
zsWxWh
rsW xWh
hfWxrWh
hzhzh
=+
=+
=+°
=°+°
(5)
Where, f is the activation function, h
t
, z
t
, r
t
, and h
t
’
are the memory state, update gate, reset gate, and new
information, respectively. The reset gate is used to
control the previous timestamp state h
t-1
into the
ConvGRU. The update gate controls the extent to
which the previous timestamp state h
t-1
and the new
input h
t
’ affect the new state vector h
t
.
2.3 Model Structure
The model structure includes three parts: data
dimension reduction, sequence prediction and feature
reconstruction. Firstly, there are three convolution
layers, each of which has 16, 32, 32 convolution
kernels respectively. The maximum pooling layers
are added after the last two convolution layers to
reduce data dimension. The sequence prediction part
has 6 layers, and each layer has 64 convolution
kernels. For the convolution model, layers are
convolution networks. For ConvLSTM and
ConvGRU, the ConvLSTM networks or ConvGRU
networks. Finally, there are 4 convolution layers,
with 32, 16, 3 and 1 convolution kernel respectively.
Upsampling layers are added after the first two
convolution layers to restore the data. In addition,
batch normalization layer (BN) was added after each
convolutional layer and ConvLSTM layer to speed up
the training process and improve performance. The
size of all 3D convolution kernels in the model is
(3,3,3). The convolution kernels of ConvLSTM and
ConvGRU are (5,5). The model structure of
ConvLSTM model is shown in Figure 1.
BDEDM 2022 - The International Conference on Big Data Economy and Digital Management
320
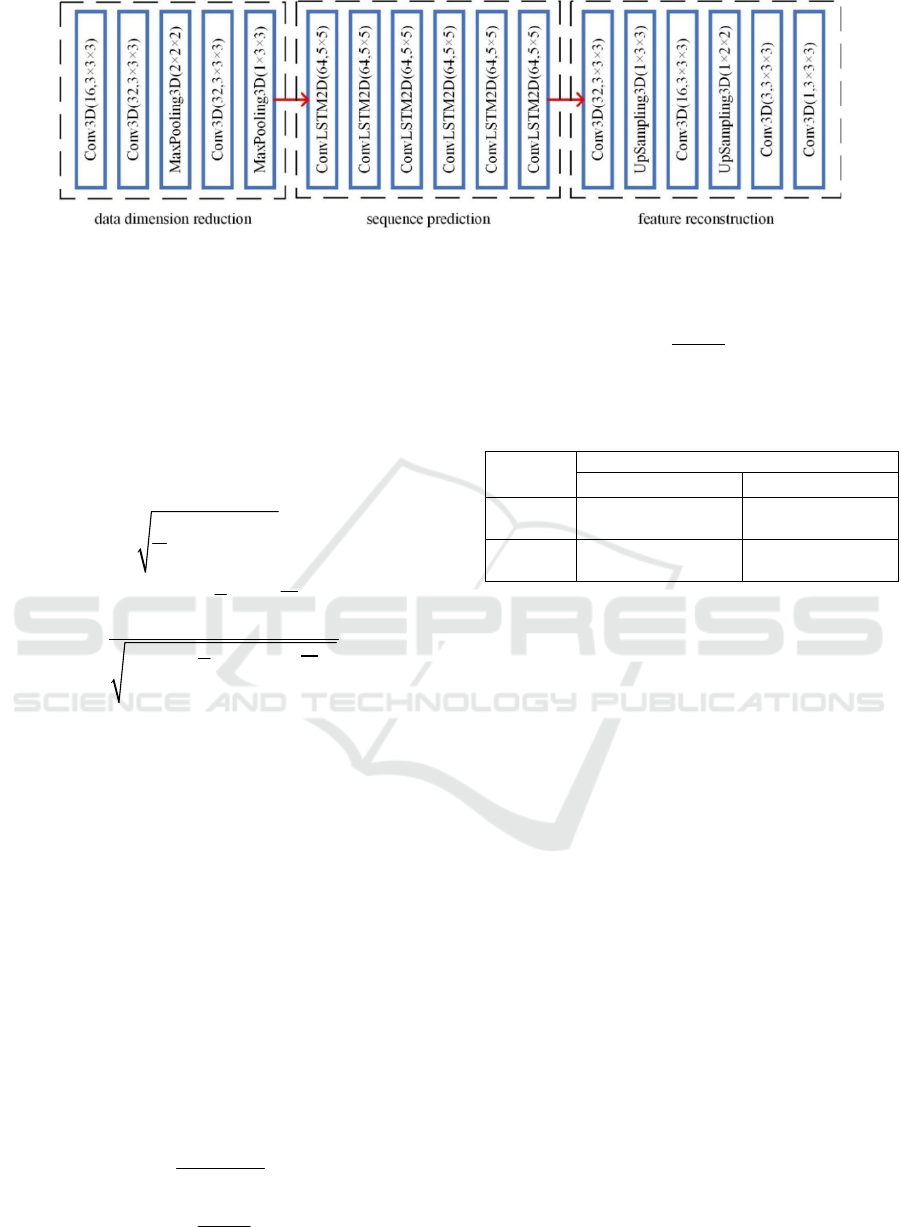
Figure 1: The model structure of ConvLSTM model.
3 EXPERIMENTS
3.1 Evaluation Methods
In this paper, we use root mean square error (RMSE)
and correlation coefficient (CC) to evaluate the
accuracy of the model. The calculation formula of
RMSE and correlation coefficient is as follows:
'2
1
1
()
n
ii
i
RMSE y y
n
=
=−
(6
)
''
1
2''2
11
()( )
()( )
n
ii
i
nn
ii
ii
yyyy
CC
yy yy
=
==
−−
=
−−
(7
)
Where, y
i
and y
i
' are measured value and model
predicted value respectively, ⎯y and ⎯y' are measured
average value and model predicted average value
respectively, and n is the number of samples. The
larger CC value is, the higher the positive correlation
between y and y' is, the better the prediction effect is.
In addition, to analyze the impact of the model on
rainstorm forecast, a precipitation threshold k was set,
and the samples were classified according to the
relationship among observed precipitation, predicted
precipitation and threshold, as shown in Table 1.
According to the successful prediction times (A),
empty prediction times (B) and prediction failure
times (C), the commonly used evaluation indexes of
precipitation prediction such as critical success index
(CSI), false alarm rate (FAR) and probability of
detection (POD) were obtained to evaluate the effect
of the model. The calculation formula of CSI, FAR
and POD is as follows:
A
CSI
A
BC
=
++
(8)
B
FAR
A
B
=
+
(9)
A
POD
A
C
=
+
(10)
Table 1: Test index classification table of precipitation
nowcasting.
Observed
Value
p
redicted value
≥
k <k
≥k
A (successful
p
rediction
)
C (missed
p
rediction
)
<k
B (empty
p
rediction)
D (invalid data)
3.2 Results
We chose three deep learning models to conduct
precipitation prediction experiments, namely,
convolution model, ConvLSTM model and
ConvGRU model. The RMSE and CC of the
predicted results are shown in Table 2. Set the
threshold value k = 0.5 mm and k = 3 mm to calculate
the evaluation indexes of precipitation forecast,
including CSI, FAR and POD. The results are shown
in Table 3.
As shown in Table 2, the application of deep
learning model to precipitation forecast projects can
achieve good performance, and the forecast accuracy
will decrease with the increase of forecast period.
Correlation coefficient of results in the first 6 hours
are all greater than 0.75 and RMSE are all less than
1.395 mm. The RMSE and CC of the ConvLSTM and
ConvGRU models are always very similar,
nevertheless the ConvGRU model had fewer
parameters and faster training and prediction times.
When the prediction period is less than 12 h, the
performance of the convolution model is the best.
While the prediction period is more than 12 h,
ConvLSTM and ConvGRU models are superior to
Convolution model due to the weak time correlation
extraction ability of the Convolution model.
Application of Data-driven Deep Learning Model in Global Precipitation Forecasting
321
Table 2: The RMSE and CC of the predicted results.
Model
6 h 12 h 18 h 24 h
RMSE CC RMSE CC RMSE CC RMSE CC
Convolution model 1.345
0.785 1.389 0.750 1.448 0.697 1.492 0.648
ConvLSTM model
1.384 0.755 1.401 0.742 1.428 0.713 1.459 0.683
ConvGRU model
1.395 0.750 1.405 0.740 1.431 0.717 1.461 0.685
Table 3: The evaluation indexes of predicted results.
Model
k = 0.5 mm k = 3 mm
CSI FAR CSI FAR CSI FAR
Convolution model 0.546
0.402 0.546 0.402 0.546 0.402
ConvLSTM model
0.576 0.335 0.576 0.335 0.576 0.335
ConvGRU model
0.572 0.327 0.572 0.327 0.572 0.327
We chose three deep learning models to conduct
precipitation prediction experiments, namely,
convolution model, ConvLSTM model and
ConvGRU model. The RMSE and CC of the
predicted results are shown in Table 2. Set the
threshold value k = 0.5 mm and k = 3 mm to calculate
the evaluation indexes of precipitation forecast,
including CSI, FAR and POD. The results are shown
in Table 3.
As shown in Table 2, the application of deep
learning model to precipitation forecast projects can
achieve good performance, and the forecast accuracy
will decrease with the increase of forecast period.
Correlation coefficient of results in the first 6 hours
are all greater than 0.75 and RMSE are all less than
1.395 mm. The RMSE and CC of the ConvLSTM and
ConvGRU models are always very similar,
nevertheless the ConvGRU model had fewer
parameters and faster training and prediction times.
When the prediction period is less than 12 h, the
performance of the convolution model is the best.
While the prediction period is more than 12 h,
ConvLSTM and ConvGRU models are superior to
Convolution model due to the weak time correlation
extraction ability of the Convolution model.
As shown in Table 3, when k = 0.5 mm, the
evaluation index scores of the three deep learning
models have their own advantages and disadvantages.
The highest CSI score of ConvLSTM model is 0.576,
the lowest FAR score of ConvGRU model is 0.327,
and the highest POD score of Convolution model is
0.863. The POD scores of the three models are all
higher than 0.8, but the CSI scores are only slightly
higher than 0.5, indicating that the missed times of
the model are far less than the number of successful
predictions and the number of empty predictions.
When k = 3 mm, the performance of evaluation
indexes of each model decreased significantly,
especially POD scores.
To further analyze the forecasting ability of the
deep learning model for global precipitation, the
precipitation data was compressed again and the
correlation coefficients of the forecast results at each
grid were calculated respectively, shown in Figure 2.
Overall, the correlation coefficients in most regions
of the world are above 0.75, particularly in 30°S-60°S
and the West Pacific coast. However, the prediction
effect is very poor in part of the areas, and even the
correlation coefficient is less than zero, such as the
Antarctic region, near the equator, northern Africa
and so on.
The Antarctic region has little precipitation due to
low temperatures, and forecasts of precipitation don't
make much sense. The Sahara Desert is located in the
north of Africa, and the special surface conditions
have a great impact on precipitation. However, the
model does not take the surface variables as a
predictor, so the performance of the model in this
region is not good., The conditions that affect
precipitation systems are complex around the equator
so that it’s difficult to predict under global models.
Especially the west coast of South America and the
east coast of the South Pacific exists El Nino
phenomenon. If this area is forecasted separately, the
effect may be improved effectively. In addition, there
is a poor forecast in the east coast of South America,
the southern Atlantic region.
BDEDM 2022 - The International Conference on Big Data Economy and Digital Management
322
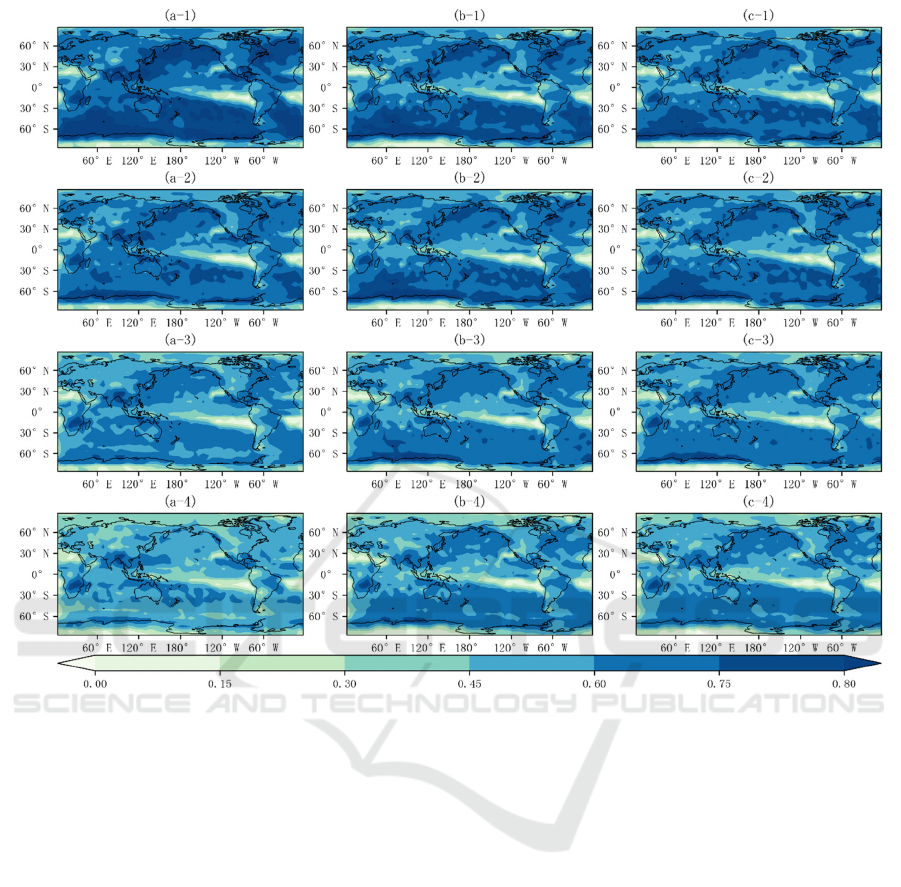
Figure 2: The correlation coefficients of the forecast results at each grid. From left to right, models are (a) Convolution model,
(b)ConvLSTM model, (c)ConvGRU model; from top to bottom, the prediction period are (1) 6 h, (2) 12 h, (3) 18 h, and (4)
24 h.
4 CONCLUSIONS
We introduced the deep learning model into the
precipitation forecast project, using the most
advanced convolution model, ConvLSTM model and
ConvGRU model to achieve global precipitation
forecast. Experimental results show that the overall
forecasting performance of the data-driven method is
excellent. The convolution model has better
prediction results for short-term precipitation.
ConvLSTM and ConvGRU models are more
effective in long-term forecasting. In addition, this
method has strong forecasting ability in 30°S-60°S
and the West Pacific Coast. But in North Africa, the
west coast of South America, the east coast of the
South Pacific, the South Atlantic, this method is
completely unavailable.
In the future, we plan to further study the
application of deep learning in precipitation
prediction and try different network structures and
loss functions to achieve better forecast performance
and faster computational efficiency. Meanwhile, the
study focuses on the influence factors of precipitation
in the west coast of South America, the east coast of
the South Pacific and the South Atlantic region, and
finds out the specific reasons for the difficulty of
forecast in this region, to realize the precipitation
forecast in complex areas.
ACKNOWLEDGEMENTS
This research was financially supported by the Key
Research and Development Program of Ningxia
(2020BCF01002), Water Resource Science and
Application of Data-driven Deep Learning Model in Global Precipitation Forecasting
323

Technology Innovation Program of Guangdong
Province (2017-03), National Natural Science
Foundation of China (51779013, U2040212),
Fundamental Research Funds for Central Public
Welfare Research Institutes (CKSF2021486/SZ,
CKSF2019478/SZ), and National Public Research
Institutes for Basic R & D Operating Expenses
Special Project (CKSF2017061/SZ).
REFERENCES
Ayzel, G., Heistermann, M., Sorokin, A., Nikitin, O. and
Lukyanova, O. (2019a). All convolutional neural
networks for radar-based precipitation nowcasting.
Procedia Computer Science. 150, 186-192.
Ayzel, G., Heistermann, M. and Winterrath, T. (2019b).
Optical flow models as an open benchmark for radar-
based precipitation nowcasting (rainymotion v0.1).
Geoscientific Model Development. 12(4), 1387-1402.
Ballas, N., Yao, L., Pal, C. and Courville, A. (2015).
Delving Deeper into Convolutional Networks for
Learning Video Representations. arXiv:1511.06432.
Bauer, P., Thorpe, A. and Brunet, G. (2015). The quiet
revolution of numerical weather prediction. Nature.
525(7567), 47-55.
Bližňák, V., Sokol, Z. and Zacharov, P. (2017). Nowcasting
of deep convective clouds and heavy precipitation:
Comparison study between NWP model simulation and
extrapolation. Atmospheric Research. 184, 24-34.
Klein, B., Wolf, L. and Afek, Y. 2015. A Dynamic
Convolutional Layer for short rangeweather prediction.
In 2015 IEEE Conference on Computer Vision and
Pattern Recognition (CVPR), pages 4840-4848.
LeCun, Y., Bengio, Y. and Hinton, G. (2015). Deep
learning. Nature. 521(7553), 436-44.
Qiu, M., Zhao, P., Zhang, K., Huang, J., Shi, X., Wang, X.
and Chu, W. 2017. A Short-Term Rainfall Prediction
Model Using Multi-task Convolutional Neural
Networks. In 2017 IEEE International Conference on
Data Mining (ICDM), pages 395-404.
Reichstein, M., Camps-Valls, G., Stevens, B., Jung, M.,
Denzler, J., Carvalhais, N. and Prabhat (2019). Deep
learning and process understanding for data-driven
Earth system science. Nature. 566(7743), 195-204.
Shi, X., Chen, Z., Wang, H., Yeung, D.-Y., Wong, W.-k.
and Woo, W.-c. (2015). Convolutional LSTM
Network: A Machine Learning Approach for
Precipitation Nowcasting. arXiv:1506.04214.
Shi, X., Gao, Z., Lausen, L., Wang, H., Yeung, D.-Y.,
Wong, W.-k. and Woo, W.-c. (2017). Deep Learning
for Precipitation Nowcasting: A Benchmark and A
New Model. arXiv:1706.03458.
Simonin, D., Pierce, C., Roberts, N., Ballard, S. P. and Li,
Z. (2017). Performance of Met Office hourly cycling
NWP-based nowcasting for precipitation forecasts.
Quarterly Journal of the Royal Meteorological Society.
143(708), 2862-2873.
Song, K., Yang, G., Wang, Q., Xu, C., Liu, J., Liu, W., Shi,
C., Wang, Y., Zhang, G., Yu, X., Gu, Z. and Zhang, W.
2019. Deep Learning Prediction of Incoming Rainfalls:
An Operational Service for the City of Beijing China.
In 2019 International Conference on Data Mining
Workshops (ICDMW), pages 180-185.
Su, A., Li, H., Cui, L. and Chen, Y. (2020). A Convection
Nowcasting Method Based on Machine Learning.
Advances in Meteorology. 2020, 1-13.
Tian, L., Li, X., Ye, Y., Xie, P. and Li, Y. 2020. A
Generative Adversarial Gated Recurrent Unit Model
for Precipitation Nowcasting. In IEEE Geoscience
and Remote Sensing Letters, pages 601-605.
Tran, Q.-K. and Song, S.-k. (2019). Computer Vision in
Precipitation Nowcasting: Applying Image Quality
Assessment Metrics for Training Deep Neural
Networks. Atmosphere. 10(5).
Wang, G., Wong, W., Liu, L. and Wang, H. (2013).
Application of multi-scale tracking radar echoes
scheme in quantitative precipitation nowcasting.
Advances in Atmospheric Sciences. 30(2), 448-460.
Wang, Y., Wu, H., Zhang, J., Gao, Z., Wang, J., Yu, P. S.
and Long, M. (2021). PredRNN: A Recurrent Neural
Network for Spatiotemporal Predictive Learning.
arXiv:2103.09504.
Wang, Y., Zhang, J., Zhu, H., Long, M., Wang, J. and Yu,
P. S. (2018). Memory In Memory: A Predictive Neural
Network for Learning Higher-Order Non-Stationarity
from Spatiotemporal Dynamics. arXiv:1811.07490.
BDEDM 2022 - The International Conference on Big Data Economy and Digital Management
324
