
A Suite of Incremental Image Degradation Operators for Testing Image
Classification Algorithms
Kevin Swingler
a
Computing Sciene and Mathematics, University of Stirling, Stirling, FK9 4LA, U.K.
Keywords:
Adversarial Images, Model Robustness, Degraded Image Performance.
Abstract:
Convolutional Neural Networks (CNN) are extremely popular for modelling sound and images, but they suffer
from a lack of robustness that could threaten their usefulness in applications where reliability is important.
Recent studies have shown how it is possible to maliciously create adversarial images—those that appear to
the human observer as perfect examples of one class but that fool a CNN into assigning them to a different,
incorrect class. It takes some effort to make these images as they need to be designed specifically to fool a
given network. In this paper we show that images can be degraded in a number of simple ways that do not need
careful design and that would not affect the ability of a human observer, but which cause severe deterioration
in the performance of three different CNN models. We call the speed of the deterioration in performance due
to incremental degradations in image quality the degradation profile of a model and argue that reporting the
degradation profile is as important as reporting performance on clean images.
1 INTRODUCTION
Convolutional Neural Networks (CNNs) are increas-
ingly criticised for being fragile, meaning that they
fail on inputs that are out of the distribution (OOD)
of the training data or on inputs that are deliberately
altered to cause failure (Heaven, 2019). Such in-
puts are often known as adversarial inputs. This pa-
per proposes a methodology for testing the robust-
ness of CNN models for computer vision, showing
how the degradation profile of a model can be used
to measure robustness and compare one model with
another. Some simple image degradation operators,
which would not fool a human viewer are shown to
significantly reduce model accuracy. The operators
are incremental, in the sense that repeated application
causes increased degradation, and we find that model
accuracy falls as the level of degradation increases.
What’s more, the ranking of the correct label in the list
of model outputs drops as an image degrades, as does
the probability assigned to the correct label. We call
these three measures the accuracy degradation pro-
file, the rank degradation profile and the probability
degradation profile. These measures degrade faster
for less robust models.
Three different models are compared: ResNet50
(He et al., 2016), the B0 version of EfficientNet (Tan
a
https://orcid.org/0000-0002-4517-9433
and Le, 2019), and version 3 of the Inception model
(Szegedy et al., 2016). The implementations readily
available in Keras were utilised, using the standard
weights from the Imagenet training data. No addi-
tional training was performed. These models were
chosen because they are widely accessible and widely
used, so their robustness is of interest. The paper is
not designed as a ranking of these algorithms—they
are chosen as illustrations only.
1.1 Background and Motivation
CNNs have become the state-of-the-art in computer
vision over the past decade, performing at or even
in excess of human levels of accuracy (Chen et al.,
2015). They have found application in industry, se-
curity, entertainment and medicine and will play a
crucial role in advances in technology such as self-
driving cars. It is becoming increasingly clear, how-
ever, that current CNN models are not as robust as
they need to be (Heaven, 2019), and if they are to be
relied on to drive us safely home or detect cancer in
a scan, then we need to be able to trust them not to
make mistakes (Maron et al., 2021a), (Maron et al.,
2021b), (Finlayson et al., 2019).
There are a small number of standard measures
of model quality. Most papers report accuracy (the
percentage of correctly classified images) and other
262
Swingler, K.
A Suite of Incremental Image Degradation Operators for Testing Image Classification Algorithms.
DOI: 10.5220/0011511000003332
In Proceedings of the 14th International Joint Conference on Computational Intelligence (IJCCI 2022), pages 262-272
ISBN: 978-989-758-611-8; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

derived measures such as precision, recall or f-score.
These measures are calculated from a dataset that is
removed from the training corpus before the mod-
elling process begins so they are independent of that
process. They are, however, generally taken from the
same distribution as the training data. Recently, there
has been an increased amount of work addressing the
question of performance on out of distribution (OOD)
examples. These are images that clearly belong to one
of the target classes for the model, but which have
been altered in some way to make them novel to the
classifier.
Much of the recent work in this field has concen-
trated on adversarial images, which are images that
are generated with the intention of fooling a classi-
fier, often guided by the classifier itself. In an early
example of this (Szegedy et al., 2013) used the gra-
dients at the output layer of a classification CNN to
guide small changes to the input pixels that would
leave the input image visually unchanged but elicit an
incorrect classification from the model. Other simi-
lar results have followed, while others have taken the
opposite view and produced images that are classi-
fied with high confidence by a CNN but which are
completely unrecognisable to humans (Nguyen et al.,
2015). Other approaches use rendering software to
produce images in which the object to be classified is
in an unusual pose (Alcorn et al., 2019) or to filter im-
ages to find those that are naturally difficult for CNNs
to classify (Hendrycks et al., 2019).
Some methods follow the gradients of the model
and some make use of gradient free optimisation tech-
niques (Uesato et al., 2018). Others make use of ad-
versarial images generated using a surrogate model
that was trained on a similar (or the same) data set.
These are known as transfer based attacks (Papernot
et al., 2017). Methods that make use of the gradients
accessible in an image may be classed as white box
attacks, as they are guided by access to the model.
Other adversarial methods, known as black box at-
tacks, degrade input images in a way that would not
cause a human observer any difficulty in making a
classification, but which can fool a CNN model. For
example, (Engstrom et al., 2019) explore the effects
of rotations and translations on classifier robustness.
They also point out that there is a focus in the liter-
ature on finding small image perturbations (in some
p-norm measure) but that humans might classify two
images as being of the same class even if there are
large differences in the pixel values.
Not all adversarial attacks involve manipulating
an existing image. A number of researchers have pro-
duced stickers that can be used to defeat computer vi-
sion algorithms by placing them in a real world scene.
For example, (Komkov and Petiushko, 2021) show
how stickers worn on a hat confuse the state-of-the-art
ArcFace face recognition model. (Thys et al., 2019)
developed a patch that can be printed and held by a
person, which is capable of hiding them from a per-
son detection algorithm.
We make the distinction between targeted adver-
sarial examples and degraded examples. The assump-
tion in a lot of the work on adversarial images is that
a malicious agent generates images to fool a CNN
classifier. The assumption behind degraded images in
more benign: simply that variations in light, weather,
image quality, occlusion and color occur naturally and
may impact the performance of classifiers. Of course,
images may also be degraded by malicious agents and
some of the degradations proposed in this paper are
both effective and trivial to apply.
We conclude that CNNs are not as robust as they
need to be, that they are easily fooled into making
errors and that a measure of robustness would be an
important step towards addressing that issue. The rest
of the paper proposes a series of such measures and
illustrates their use on three popular CNN models.
1.2 Degradation Operators
Fourteen degradation operators were tested, each with
30 different levels of degradation from the original
image. All the operators have the quality that each
subsequent level of degradation increases the differ-
ence from the original image. Operators can be char-
acterised as either global, where every pixel in the im-
age is altered at each level, or local, where only some
pixels are altered. They may also be characterised as
being deterministic, where the same degradation has
the same effect in repeated applications to the same
image, or stochastic, where the effect of applying
a degradation is drawn at random from some distri-
bution. Operators may also be either colour based,
where the colour palette is altered, or pixel based,
where the alterations are to individual pixels.
Each level of a degradation has a degree to which
it is applied. For example, if random pixel values are
changed, the degree is the number of pixels altered
at a single level. These degree parameters are chosen
experimentally to produce a degradation to near zero
accuracy after 30 levels.
The following sections briefly describe and char-
acterise each degradation operator. Unless stated oth-
erwise, the phrase randomly selected means that sam-
ples were drawn from a uniform distribution.
Random Lines. Lines of one pixel width are drawn
onto the image with anti-aliasing. Lines start at a ran-
A Suite of Incremental Image Degradation Operators for Testing Image Classification Algorithms
263

dom location on the left or top edge of the image and
end at a random location on the right or bottom edge,
meaning they have a location and orientation both
drawn from a uniform random distribution. Two dif-
ferent operators are defined, one which draws white
lines and one which draws black lines. This operator
is local, stochastic and pixel based. A single line is
added at each level of the degradation.
Random Boxes. Small black rectangles are drawn
onto the image, with random locations and with
height and width chosen from a uniform random dis-
tribution over 2 to 5 pixels. This operator is local,
stochastic and pixel based. The number of rectangles
added at each level of the degradation is (h + w)/10
where h and w are the height and width of the image
respectively.
Global Blur. A five by five pixel uniform blur is ap-
plied to the image by replacing each color channel
value for each pixel by the average of the values in
a 5 × 5 square neighbourhood around the pixel. Re-
peated application of the operator leads to increased
levels of blur. This operator is global, deterministic
and pixel based.
Local Blur. Small rectangular areas of the image
are replaced by the average value of the pixels in that
rectangle (for each color channel). Rectangle loca-
tions are selected at random from a uniform distribu-
tion over the image and height and width are selected
uniformly at random from [2, 10] pixels. This opera-
tor is local, stochastic and pixel based. The number
of rectangles added at each level of the degradation is
(h + w).
Random Noise. A number of pixels, chosen at ran-
dom, have their colours changed to a new, random
color. This operator is local, stochastic and pixel
based. The number of pixels changed at each itera-
tion is wh/50.
Random Pixel Exchange. Pairs of pixel locations
are selected at random and the color values of the
two locations are exchanged, so that the pixels ef-
fectively swap locations. The number of pixels ex-
changed at each iteration is wh/20. This operator is
local, stochastic and pixel based.
Random Adjacent Pixel Exchange. Pairs of adja-
cent pixels are swapped. The location of the first pixel
is chosen at random and the location of the second is
chosen at random from the eight adjacent locations
around the first. The number of pixels exchanged
at each iteration is wh/20. This operator is local,
stochastic and pixel based.
White Fog. Pixel locations are selected at random
and the color of the chosen pixels is faded towards
white. The fading is done by adding 20 to each of
the colour channels and clipping each at 255. The
number of pixels exchanged at each iteration is wh/5.
This operator is local, stochastic and pixel based.
Fade to Black, White or Greyscale. The whole
image has its color space altered so that it fades to-
wards a chosen target palette, either an all black im-
age, an all white image, or the image in greyscale.
To fade towards black, each color channel of each
pixel is multiplied by 0.9 and to fade to white, they
are multiplied by 1.1. The move towards greyscale is
achieved by converting the image to the HSV colour
space, multiplying the saturation channel by 0.9, and
then converting back to the RGB colour space. These
operators are global, deterministic and color based.
Posterize. The number of colors in the palette of the
image is reduced at each iteration. A simple method is
used, in which each color channel is discretized sep-
arately into a chosen number of distinct values. The
color range from 0 to 255 is split into b bins, each of
size 255/b. The color value for bin i is calculated as
(i + 1)255/b. The bin count, b starts at 32 in these
experiments and decreases by one each iteration until
it reaches 2 at the last level. This operator is global,
deterministic and color based.
JPEG Compress. Images are compressed using
JPEG compression with increasingly high levels of
compression. In this work, the imencode() func-
tion of the Python OpenCV library was used to en-
code each image, which was then reconstructed using
imdecode() to produce a degraded image. The degree
of compression over 30 iterations started at 32 and fin-
ished at 2. This operator is global, deterministic and
color based.
Model Gradient Descent. This is the only one of
the degradation operators that relies on access to the
model being used to make the classifications. It fol-
lows (Szegedy et al., 2013) by following the gradients
of the output probabilities from the model, back prop-
agating them to the input layer to make small changes
to the input image that move the classification away
from the correct output. This operator is local, deter-
ministic and pixel based.
NCTA 2022 - 14th International Conference on Neural Computation Theory and Applications
264
1.3 Approximating Real World
Degradation
All but one of the operators described above are ap-
plied without knowledge of the model that will be
used to make classifications. They can all be applied
very simply to source images in digital form. Some
may also be applied to real world scenes before the
scene is photographed and some are approximations
to real world degradations in image quality. Placing
small black or white rectangular stickers onto objects
such as road signs has been shown to confuse classi-
fication models (Eykholt et al., 2018) and we approx-
imate that with the Random Boxes operator. Simi-
larly, it would be possible to draw thin black lines
across objects that you did not want detected. The
Local Blur operator is an approximation to the effects
of grease or water on a lens, blurring small areas of
the image. The Fade to Black operator approximates
darkness and the fade to white operator approximates
saturation due to bright light. Both situations occur
naturally in vehicle driving situations. The White Fog
operator approximates the effects of fog or smoke in
a scene and and the Posterise and JPEG Compression
operators investigate the effects of poor quality sen-
sors or storage compression. We include one adver-
sarial example—the Gradient Descent—for compar-
ison, but this paper is primarily concerned with de-
graded images rather than carefully designed attacks.
2 METHODOLOGY
The degradation profile for three popular CNN image
classification algorithms was calculated. The models
are the 50 layer version of ResNet (ResNet50) (He
et al., 2016), the B0 version of EfficientNet (Efficient-
NetB0) (Tan and Le, 2019), and version 3 of the In-
ception model (InceptionV3) (Szegedy et al., 2016),
all using the default weights trained on the Imagenet
dataset. The Keras implementation of these models
was used. Models were tested using a small sample
of 590 images from the Imagenet training set, all se-
lected for being correctly classified by the ResNet50
model. Three measures of performance were calcu-
lated: Accuracy is the proportion of correctly classi-
fied images over the dataset. Label Rank is the av-
erage index position of the correct label in the model
output list, sorted by probability. A score of 5 sug-
gests that the model is often incorrect, but that the
correct answer is still in the top five. There are 1000
class labels in the Imagenet dataset so a model that is
no better than chance would score around 500. Label
Probability is the average probability assigned by the
model to the output label that is known to be correct.
The models have a softmax at the output layer, so we
expect the probability assigned to non-winning labels
to be low.
For each model, the testing regime was as follows:
For each degradation operator, all 590 images are pre-
sented to the model once for each of the 30 levels of
degradation. The three performance measures were
recorded for each level. The images are of different
sizes, but the models expect an input of a fixed size,
so the images were resized before the degradation op-
erations were applied, meaning that the pixel based
operations really did alter single pixels in the images
processed by the models. That is to say that the degra-
dations were not subject to scaling.
3 RESULTS
Over three models, fourteen degradation operators, 30
levels of degradation, and three performance metrics,
there are many ways to analyse the results. The sim-
plest aggregation is to calculate the average of each
performance metric for each model. This gives an
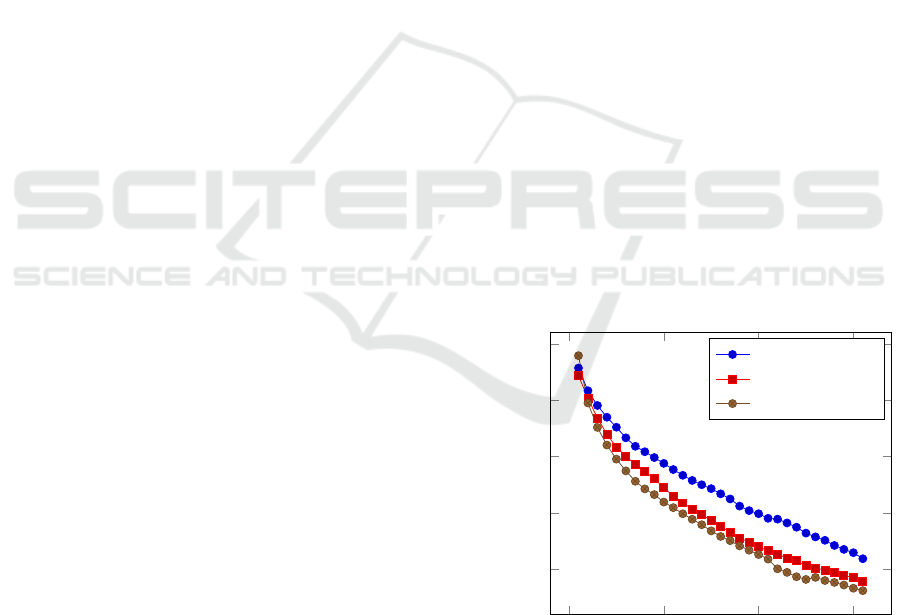
easily digested comparison among the models. Fig-
ures 1, 2 and 3 show the average of the three perfor-
mance metrics: accuracy, ranks and probability, by
level, for each of the three models. They show that
InceptionV3 is the most robust across all three mea-
sures. Note that for the correct label rank measure,
low values are closer to the top, so the winning label
has a rank of zero.
0 10 20 30
0.2
0.4
0.6
0.8
1
Degradation level
Accuracy
InceptionV3
EfficientNetB0
ResNet50
Figure 1: The accuracy degradation profile for ResNet50,
EfficientNetB0 and InceptionV3 across 30 levels of input
image degradation. The average is taken over 14 different
degradation operators.
A Suite of Incremental Image Degradation Operators for Testing Image Classification Algorithms
265

0 10 20 30
0
50
100
150
200
Degradation level
Average Rank of Correct Label
InceptionV3
EfficientNetB0
ResNet50
Figure 2: The rank degradation profile for ResNet50, Effi-
cientNetB0 and InceptionV3 across 30 levels of input image
degradation. The average is taken over 14 different degra-
dation operators.
0 10 20 30
0.2
0.4
0.6
0.8
Degradation level
Average Probability of Correct Label
InceptionV3
EfficientNetB0
ResNet50
Figure 3: The probability degradation profile for ResNet50,
EfficientNetB0 and InceptionV3 across 30 levels of input
image degradation. The average is taken over 14 different
degradation operators.
3.0.1 Degradation Profile by Model
The degradation profile of a model, given a test set
and a degradation operator describes the performance
of the model on increasingly degraded versions of the
images in a data set for which it was originally ca-
pable of achieving 100% classification accuracy. The
steeper the curve, the more fragile the model is judged
to be. We compare the profile of each operator in
turn. Figures 4, 5, and 6 show the profiles for ResNet
50, EfficientNet B0 and Inception V3. Looking at
these figures, we learn that all networks are robust to
changes from full colour to grey scale and all are par-
ticularly vulnerable to blurring an image or swapping
the values in a few pixel pairs.
0 10 20 30
0
0.2
0.4
0.6
0.8
1
Degradation level
Accuracy
Black lines
White lines
Global Blur
Rand adj pixel swap
White fog
Random Boxes
Fade black
Fade white
Fade grey
Swap rand pixels
Local blur
Posterise
JPEG
Gradient Descent
Figure 4: The accuracy degradation profile for ResNet50
for 14 different degradation operators. The y axis shows ac-
curacy and the x axis increases with the degree of degrada-
tion. The model is particularly vulnerable to the addition of
small black rectangles, the swapping of pixel locations and
blurring of the image. It can also be quickly fooled using
gradient descent away from the winning category.
3.1 Example Failure Points
In this section we investigate the degree to which an
image needs to be degraded before the average accu-
racy of a CNN classifier drops below 50% on the test
data. Tables 1, 2, and 3 describe the degree of degra-
dation required to move each of the three models from
100% accuracy to 50% accuracy. The percentage of
the pixels in the original image that are changed as a
result of each degradation is given, along with a de-
scription of the change. This measure is only mean-
ingful for the pixel based operators, as the global op-
erators alter every pixel in an image. The three op-
erators that require the fewest pixels to change be-
fore accuracy drops below 50% are those that draw
lines or small boxes onto the image. In the case of
the small boxes, for example, only 3% of the pixels
need to be changed in the images in the test set be-
NCTA 2022 - 14th International Conference on Neural Computation Theory and Applications
266

0 10 20 30
0
0.2
0.4
0.6
0.8
1
Degradation level
Accuracy
Figure 5: The accuracy degradation profile for EfficientNet
B0 for 14 different degradation operators. The y axis shows
accuracy and the x axis increases with the degree of degra-
dation. The model is particularly vulnerable to the swap-
ping of pixel locations and blurring of the image. Refer to
figure 4 for the legend.
0 10 20 30
0
0.2
0.4
0.6
0.8
1
Degradation level
Accuracy
Figure 6: The accuracy degradation profile for Inception
V3 for 14 different degradation operators. The y axis shows
accuracy and the x axis increases with the degree of degra-
dation. The model is particularly vulnerable to the addition
of small black rectangles, the swapping of pixel locations
and blurring of the image. Refer to figure 4 for the legend.
fore the accuracy drops below 50% for the ResNet50
model. The degradations that the models are most ro-
bust to are the color saturation based operators: fade
to black, fade to white and fade to grey scale. All
three models are very robust under a change from full
color to grey scale, maintaining around 80% accuracy
even when the image is reduced completely to grey
scale. Similarly, the models are robust to a reduction
in the number of colours in the palette. EfficientNet is
particularly robust, achieving 55% accuracy when the
palette is reduced to just 8 colors.
The gradient descent operator is the only one we
employ that is aided by access to the model itself. By
following the steepest gradient away from the win-
ning category label, an adversarial image is generated,
which is similar to the original image, but produces a
different output label. A more robust model will re-
quire a greater number of steps down the classification
gradient before the output class is changed. Of the
three models we investigate here, ResNet50 and Effi-
cientNetB0 are far more brittle than the Inception V3
model, with the number of steps required to change
the labels on 50% of the test set being 1, 4 and 22 for
the models respectively.
Table 1: The average change made to images in the test set
to reduce the accuracy of the ResNet50 model from 100%
to 50% on that dataset. The % Ch. column contains the
number of pixels changed as a percentage of those in the
image.
Degr. Change Made Ch.
Black
Lines
6 randomly placed 1 pixel
wide lines
6%
White
Lines
7 randomly placed 1 pixel
wide lines
8%
Random
Boxes
90 boxes 3%
Global
blur
4 consecutive 5×5 convo-
lutions
100%
Local blur 1792 local blur boxes 70%
Noise 8% of pixels replaced
with a random color
8%
Swap Ad-
jacent Pix-
els
56% of pixels changed 56%
Swap
Rand.
Pixels
9% of pixels changed 9%
White Fog Average pixel values in-
creased: 151 to 187
86%
Fade
Black
Average pixel values re-
duced: 151 to 18
100%
Fade
White
Average pixel values in-
creased: 151 to 250
100%
Posterise Reduced to 151 Colors 100%
JPEG
Compress
Reduced to 135 Colors 100%
Gradient
Descent
1 Iteration 100%
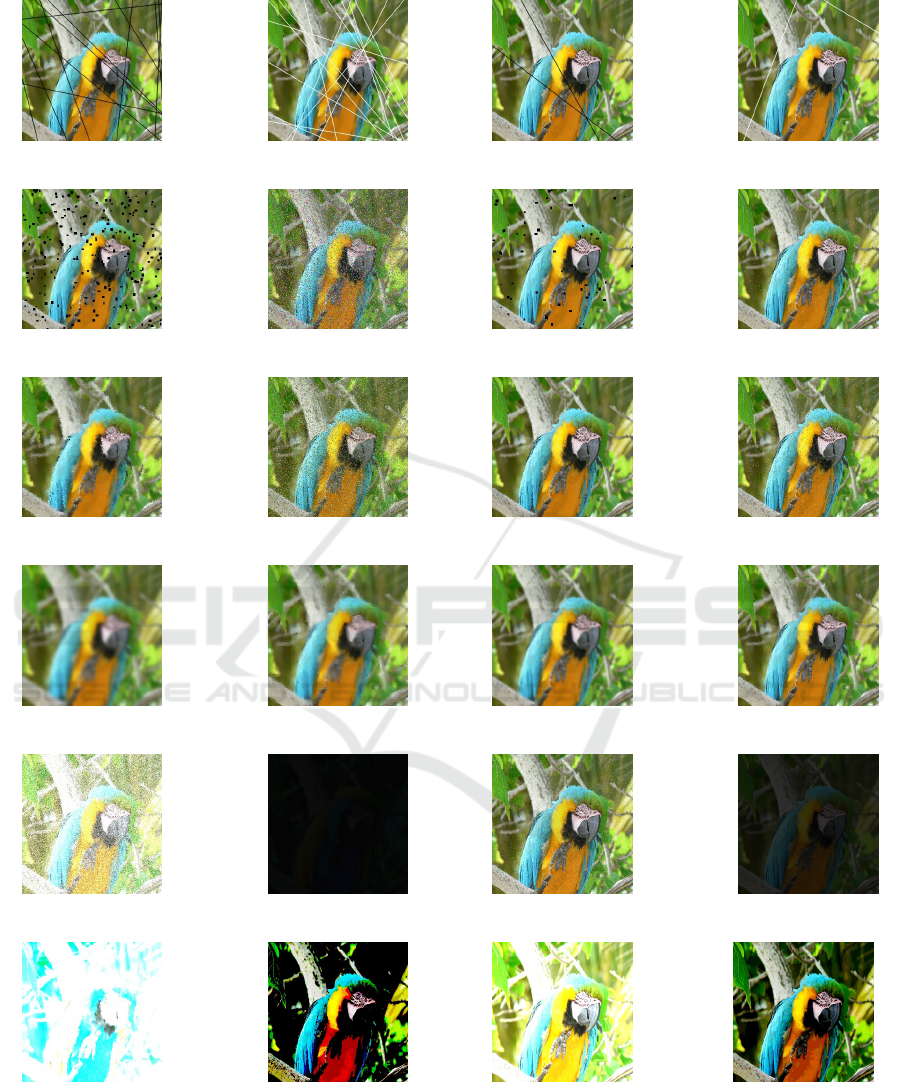
3.2 Visualising the Effects of
Degradation
To help the reader visualise the degree to which im-
ages need to be changed to produce a significant drop
in model performance, we present some visual exam-
A Suite of Incremental Image Degradation Operators for Testing Image Classification Algorithms
267

Table 2: The average change made to images in the test set
to reduce the accuracy of the EfficientNetB0 model from
100% to 50% on that dataset. The % Ch. column contains
the number of pixels changed as a percentage of those in the
image.
Degr. Change Made Ch.
Black
Lines
10 randomly placed 1
pixel wide lines
10%
White
Lines
12 randomly placed 1
pixel wide lines
13%
Random
Boxes
224 boxes 8%
Global
blur
2 consecutive 5×5 convo-
lutions
100%
Local blur 896 local blur boxes 70%
Noise 16% of pixels replaced
with a random color
16%
Swap Ad-
jacent Pix-
els
56% of pixels changed 56%
Swap
Random
Pixels
13% of pixels changed 13%
White Fog Average pixel values in-
creased: 151 to 190
89%
Fade
Black
Average pixel values re-
duced: 151 to 31
100%
Fade
White
Average pixel values in-
creased: 151 to 253
100%
Posterise Reduced to 8 Colors 100%
JPEG
Compress
Reduced to 25 Colors 100%
Gradient
Descent
5 Iterations 100%
ples. Specifically, we present examples of images that
move an Inception V3 model from 100% accuracy to
90%, 50% and 10% respectively. For each degrada-
tion operator, the accuracy profile is used to find the
number of times the degradation needs to be applied
to first cause the accuracy to drop below the target
threshold on the test dataset. A single example im-
age is then degraded this many times to produce an
example image. These images are just examples, but
they illustrate to the human viewer how little or much
degradation is needed to cause a drop in performance
from slight to catastrophic.
4 OTHER MEASURES OF
ROBUSTNESS
CNN models have an output layer that associates a
score or probability with every possible class label.
Classification is performed by identifying the label
Table 3: The average change made to images in the test
set to reduce the accuracy of the Inception V3 model from
100% to 50% on that dataset. The % Ch. column contains
the percentage of pixels changed in the image.
Degr. Change Made Ch.
Black
Lines
13 randomly placed 1
pixel wide lines
14%
White
Lines
14 randomly placed 1
pixel wide lines
13%
Random
Boxes
176 boxes 7%
Global
blur
5 consecutive 5×5 convo-
lutions
100%
Local blur 5824 local blur boxes 77%
Noise 24% of pixels replaced
with a random color
24%
Swap Ad-
jacent Pix-
els
78% of pixels changed 78%
Swap
Random
Pixels
22% of pixels changed 22%
White Fog Average pixel values in-
creased: 151 to 225
100%
Fade
Black
Average pixel values re-
duced: 151 to 8
100%
Fade
White
Average pixel values in-
creased: 151 to 253
100%
Posterise 85 Colors 100%
JPEG
Compress
Reduced to 23 Colors 100%
Gradient
Descent
Reduced to 22 Iterations 100%
with the highest score. A model might be considered
more robust if a degradation causes the correct label
to be rated as the second most probable rather than
the 10th. Where the probabilities of the top rated cat-
egories are close, there are methods based on context
(Chu and Cai, 2018) that might help disambiguate the
confusion. Therefore, it is useful to know the proba-
bility assigned to the correct label and how far down
the probability rankings a degradation moves the cor-
rect label. We measure the average probability and
the average rank of the correct class across our test
dataset for each degree of degradation. We call these
the probability degradation profile and the rank degra-
dation profile.
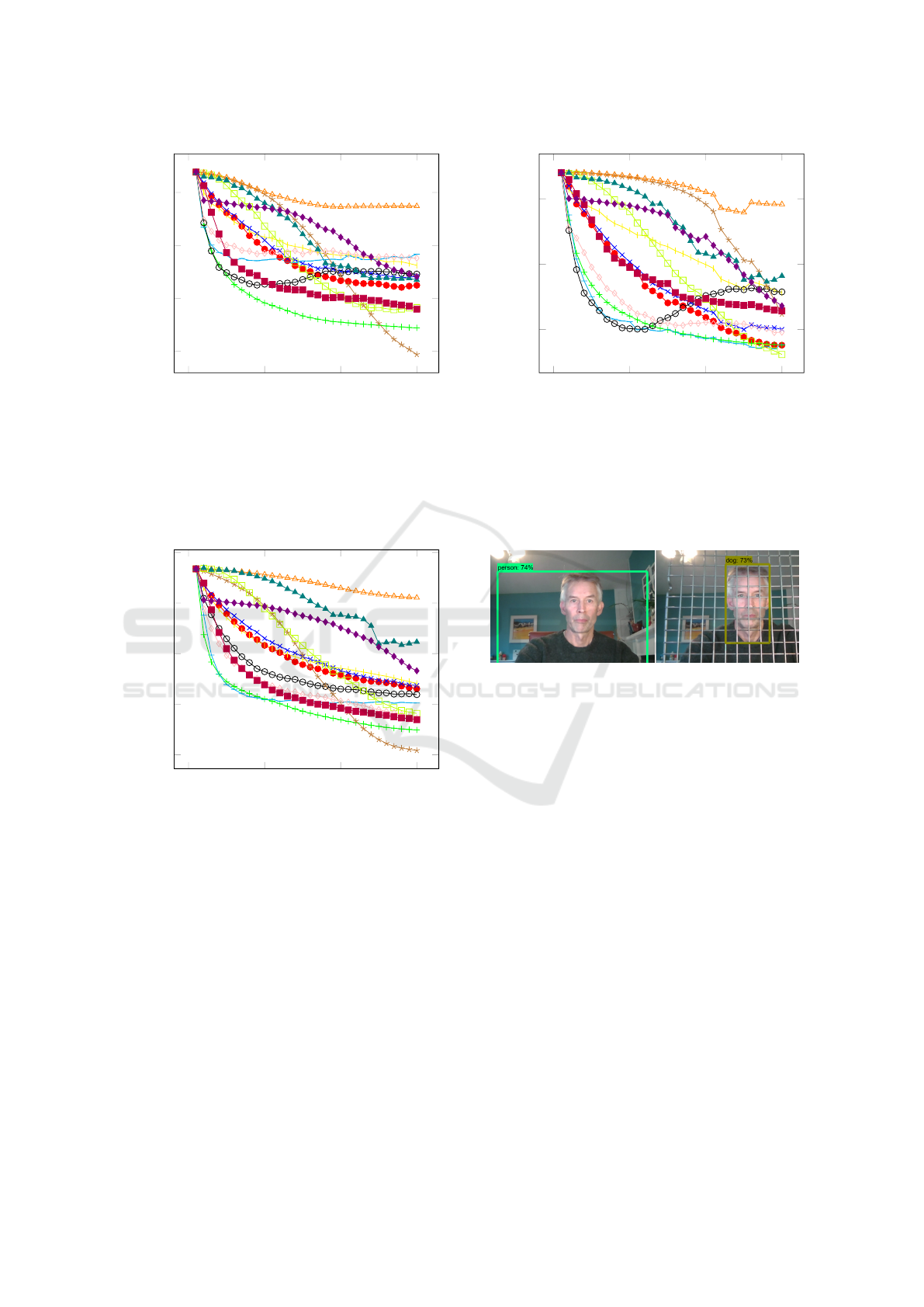
Figures 10, 11 and 12 show the rank degrada-
tion profiles for ResNet50, EfficientNetB0 and Incep-
tion V3, respectively and figures 13, 14 and 15 show
the probabiliy degradation profiles for ResNet50, Ef-
ficientNetB0 and Inception V3, respectively.
NCTA 2022 - 14th International Conference on Neural Computation Theory and Applications
268
(a) Black lines. (b) White Lines.
(c) Small Boxes. (d) Random Noise.
(e) Adj. Pixel Swap. (f) Rand. Pixel Swap.
(g) Global Blur. (h) Local Blur.
(i) White Fog. (j) Fade to Black.
(k) Fade to white. (l) Posterise.
Figure 7: Example degraded images at the first point where
the accuracy measure for our test data first drops from 100%
to below 50%.
(a) Black lines. (b) White Lines.
(c) Small Boxes. (d) Random Noise.
(e) Adj. Pixel Swap. (f) Rand. Pixel Swap.
(g) Global Blur. (h) Local Blur.
(i) White Fog. (j) Fade to Black.
(k) Fade to white. (l) Posterise.
Figure 8: Example degraded images at the first point where
the accuracy measure for our test data first drops from 100%
to below 90%.
A Suite of Incremental Image Degradation Operators for Testing Image Classification Algorithms
269
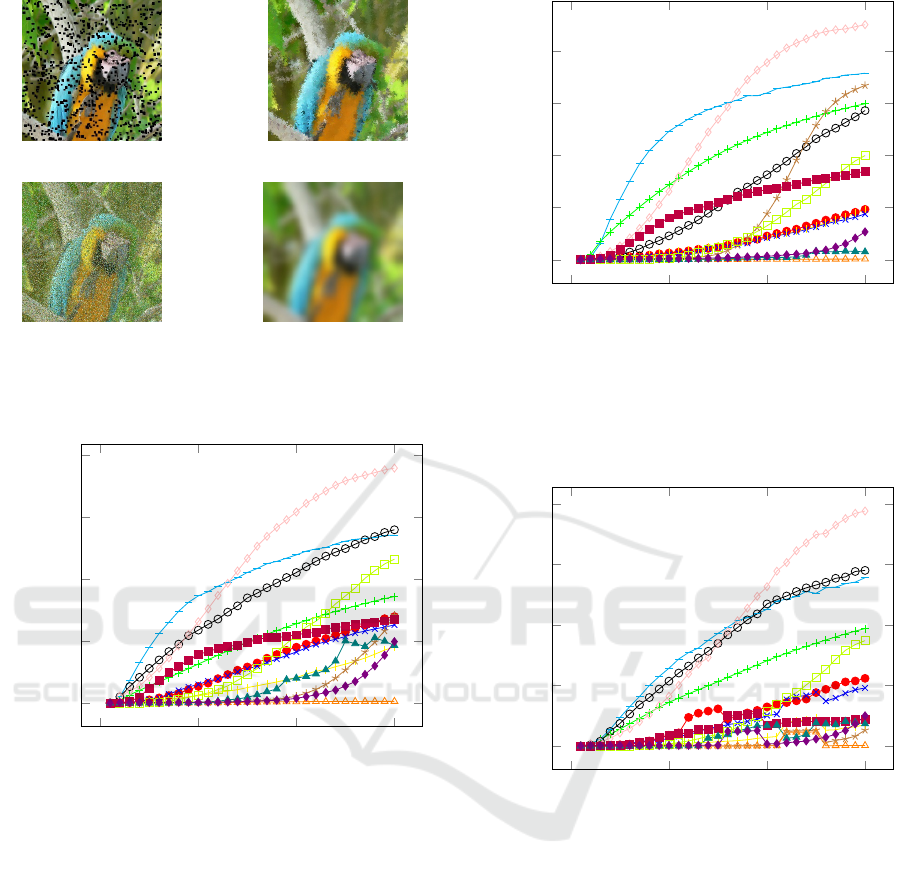
(a) Small Boxes. (b) Adj. Pixel Swap.
(c) Rand. Pixel Swap. (d) Global Blur.
Figure 9: Example degraded images at the first point where
the accuracy measure for our test data first drops from 100%
to below 10%.
0 10 20 30
0
100
200
300
400
Degradation level
Accuracy
Figure 10: The rank degradation profile for ResNet50 for
14 different degradation operators. The y axis shows aver-
age ranking of the correct label and the x axis increases with
the degree of degradation. The three most damaging degra-
dations are swapping pixel pairs, and occluding with small
rectangles. Refer to figure 4 for the legend.
5 CONCLUSIONS AND FURTHER
WORK
It is clear that some of the commonly used computer
vision CNN models are easily fooled by a range of
image degradations. By presenting a suite of sim-
ple degradation operators, we hope to encourage re-
searchers to include a measure of robustness in ad-
dition to accuracy measures when presenting new
algorithms or architectures. We found that three
commonly used CNN architectures were robust to
changes in the color palette, but that small pixel
0 10 20 30
0
100
200
300
400
Degradation level
Accuracy
Figure 11: The rank degradation profile for EfficientNet B0
for 14 different degradation operators. The y axis shows
average ranking of the correct label and the x axis increases
with the degree of degradation. The three most damaging
degradations are swapping pixel pairs, and occluding with
small rectangles. Refer to figure 4 for the legend.
0 10 20 30
0
100
200
300
400
Degradation level
Accuracy
Figure 12: The rank degradation profile for Inception V3
for 14 different degradation operators. The y axis shows
average ranking of the correct label and the x axis increases
with the degree of degradation. The three most damaging
degradations are swapping pixel pairs, and occluding with
small rectangles. Refer to figure 4 for the legend.
level changes such as drawing thin lines or swap-
ping random pixel values cause severe degradation
in accuracy. We show some examples where the ac-
curacy of the CNN falls below 10%, and the iden-
tity of the object is still clear to the human eye.
We hope that more researchers will include mea-
sures of robustness when they report the performance
of new computer vision algorithms. To this end,
the code to perform the image degradations and as-
sociated experiments may be found on github at
https://github.com/kevswingler/ImageDegrade.
NCTA 2022 - 14th International Conference on Neural Computation Theory and Applications
270
0 10 20 30
0.2
0.4
0.6
0.8
Degradation level
Accuracy
Figure 13: The probability degradation profile for ResNet50
for 14 different degradation operators. The y axis shows the
average probability assigned to the correct label and the x
axis increases with the degree of degradation. The three
most damaging degradations are swapping pixel pairs, and
occluding with small rectangles. Refer to figure 4 for the
legend.
0 10 20 30
0
0.2
0.4
0.6
0.8
Degradation level
Accuracy
Figure 14: The probability degradation profile for Efficient-
Net B0 for 14 different degradation operators. The y axis
shows the average probability assigned to the correct label
and the x axis increases with the degree of degradation. The
three most damaging degradations are swapping pixel pairs,
and occluding with small rectangles. Refer to figure 4 for
the legend.
We are curious to see whether the simple degrada-
tions we propose can be used live. For example, rather
than use a carefully designed patch to fool a person
detector, as proposed by (Thys et al., 2019), simple
props are often sufficient. The question of computer
vision camouflage is the subject of ongoing work, but
figure 16 shows one small example where an SSD
MobileNet object detection algorithm trained on the
MS-COCO dataset is fooled into labelling a person as
a dog with the aid of nothing more sophisticated than
0 10 20 30
0.4
0.6
0.8
Degradation level
Accuracy
Figure 15: The probability degradation profile for Inception
V3 for 14 different degradation operators. The y axis shows
the average probability assigned to the correct label and the
x axis increases with the degree of degradation. The three
most damaging degradations are swapping pixel pairs, and
occluding with small rectangles. Refer to figure 4 for the
legend.
Figure 16: It is easy to fool an SSD object detector by sim-
ply holding a grid in front of yourself - here the classifica-
tion changes from person to dog.
a cake cooling rack.
As the robustness of models improves, the type
of degradations that should be tested will evolve and
we do not expect the operations described here to be
challenging for long. We hope that other authors will
propose further tests and that some kind of arms race
will enhance the robustness of all models. We hope,
of course, that the algorithm developers win the race
but at the moment what is important is that they start
to take part.
REFERENCES
Alcorn, M. A., Li, Q., Gong, Z., Wang, C., Mai, L., Ku, W.-
S., and Nguyen, A. (2019). Strike (with) a pose: Neu-
ral networks are easily fooled by strange poses of fa-
miliar objects. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 4845–4854.
Chen, L., Wang, S., Fan, W., Sun, J., and Naoi, S.
(2015). Beyond human recognition: A cnn-based
A Suite of Incremental Image Degradation Operators for Testing Image Classification Algorithms
271

framework for handwritten character recognition. In
2015 3rd IAPR Asian Conference on Pattern Recogni-
tion (ACPR), pages 695–699. IEEE.
Chu, W. and Cai, D. (2018). Deep feature based con-
textual model for object detection. Neurocomputing,
275:1035–1042.
Engstrom, L., Tran, B., Tsipras, D., Schmidt, L., and
Madry, A. (2019). Exploring the landscape of spatial
robustness. In International Conference on Machine
Learning, pages 1802–1811. PMLR.
Eykholt, K., Evtimov, I., Fernandes, E., Li, B., Rahmati, A.,
Xiao, C., Prakash, A., Kohno, T., and Song, D. (2018).
Robust physical-world attacks on deep learning visual
classification. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
Finlayson, S. G., Bowers, J. D., Ito, J., Zittrain, J. L., Beam,
A. L., and Kohane, I. S. (2019). Adversarial attacks on
medical machine learning. Science, 363(6433):1287–
1289.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Heaven, D. (2019). Why deep-learning ais are so easy to
fool.
Hendrycks, D., Zhao, K., Basart, S., Steinhardt, J.,
and Song, D. (2019). Natural adversarial exam-
ples.(2019). arXiv preprint cs.LG/1907.07174.
Komkov, S. and Petiushko, A. (2021). Advhat: Real-world
adversarial attack on arcface face id system. In 2020
25th International Conference on Pattern Recognition
(ICPR), pages 819–826. IEEE.
Maron, R. C., Haggenm
¨
uller, S., von Kalle, C., Utikal,
J. S., Meier, F., Gellrich, F. F., Hauschild, A., French,
L. E., Schlaak, M., Ghoreschi, K., Kutzner, H., Heppt,
M. V., Haferkamp, S., Sondermann, W., Schadendorf,
D., Schilling, B., Hekler, A., Krieghoff-Henning, E.,
Kather, J. N., Fr
¨
ohling, S., Lipka, D. B., and Brinker,
T. J. (2021a). Robustness of convolutional neural net-
works in recognition of pigmented skin lesions. Euro-
pean Journal of Cancer, 145:81–91.
Maron, R. C., Schlager, J. G., Haggenm
¨
uller, S., von Kalle,
C., Utikal, J. S., Meier, F., Gellrich, F. F., Hobels-
berger, S., Hauschild, A., French, L., Heinzerling, L.,
Schlaak, M., Ghoreschi, K., Hilke, F. J., Poch, G.,
Heppt, M. V., Berking, C., Haferkamp, S., Sonder-
mann, W., Schadendorf, D., Schilling, B., Goebeler,
M., Krieghoff-Henning, E., Hekler, A., Fr
¨
ohling, S.,
Lipka, D. B., Kather, J. N., and Brinker, T. J. (2021b).
A benchmark for neural network robustness in skin
cancer classification. European Journal of Cancer,
155:191–199.
Nguyen, A., Yosinski, J., and Clune, J. (2015). Deep neural
networks are easily fooled: High confidence predic-
tions for unrecognizable images. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 427–436.
Papernot, N., McDaniel, P., Goodfellow, I., Jha, S., Celik,
Z. B., and Swami, A. (2017). Practical black-box at-
tacks against machine learning. In Proceedings of the
2017 ACM on Asia conference on computer and com-
munications security, pages 506–519.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wo-
jna, Z. (2016). Rethinking the inception architecture
for computer vision. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2818–2826.
Szegedy, C., Zaremba, W., Sutskever, I., Bruna, J., Er-
han, D., Goodfellow, I., and Fergus, R. (2013). In-
triguing properties of neural networks. arXiv preprint
arXiv:1312.6199.
Tan, M. and Le, Q. (2019). Efficientnet: Rethinking model
scaling for convolutional neural networks. In Interna-
tional Conference on Machine Learning, pages 6105–
6114. PMLR.
Thys, S., Ranst, W. V., and Goedem
´
e, T. (2019). Fooling au-
tomated surveillance cameras: Adversarial patches to
attack person detection. 2019 IEEE/CVF Conference
on Computer Vision and Pattern Recognition Work-
shops (CVPRW), pages 49–55.
Uesato, J., O’donoghue, B., Kohli, P., and Oord, A. (2018).
Adversarial risk and the dangers of evaluating against
weak attacks. In International Conference on Machine
Learning, pages 5025–5034. PMLR.
NCTA 2022 - 14th International Conference on Neural Computation Theory and Applications
272
