
Mental and Physical Training for Elderly Population
using Service Robots
Christopher Ruff
1a
, Isaac Henderson
2b
, Tibor Vetter
3
and Andrea Horch
1c
1
Fraunhofer Institute for Industrial Engineering IAO, Nobelstrasse 12, 70569, Germany
2
Technology Management (IAT), University of Stuttgart, Allmandring 35, 70569, Germany
3
Wohlfahrtswerk für Baden-Württemberg, Germany
Tibor.Vetter@wohlfahrtswerk.de
Keywords: Elderly Care, Robotics, Social Robot, Mental Exercise, Physical Exercise, Health-Care, Social Human-Robot
Interaction, Companion Robots, Personalization, Biography Work, Artificial Intelligence, Robot Vision.
Abstract: In this paper we present the implementation and evaluation of mental and physical exercise applications on a
humanoid service robot for use in an elderly care setting. As the mental exercise application a personalized,
multi-medial quiz was designed and implemented using information from participants biography. The robot
acts as the quiz master, interacting with the participants in a natural and encouraging way. For the physical
exercise, a variant of the “charade” game was implemented that uses machine learning from previously
collected video samples and computer vision on the robot to identify the activities that participants enact.
Both applications were evaluated successfully in a real life setting and highlight the potential of using service
robots in elderly care settings.
1 INTRODUCTION
Demographic change across most western nations
and the accompanying increase of the elderly
population will have tremendous socio-economic
effects in the coming years. Current German surveys
show, that 22% of the German population are older
than 65 years and 50% of the population are older
than 45 (Destatis, 2021). Changes associated with
aging will inevitably lead to an increase of people
requiring nursing care. Providing an adequate care for
those populations is especially challenging due to a
chronic shortage of caretakers and staff in elderly care
(Destatis, 2020).
Physical and mental exercise, preferably in social
groups are deemed important activities to maintain
health and wellbeing while also providing social
exchange, which is often lacking in aging
populations. These activities can increase self-
reliance and reduce anxiety and the need for health-
and nursing care (Elias et al., 2015).
a
https://orcid.org/0000-0003-0484-4131
b
https://orcid.org/0000-0001-9397-1321
c
https://orcid.org/0000-0001-9384-316X
Healthcare Technology and particularly
autonomous service robots have the potential to
address these challenges by reducing the need for
human resources.
In this paper, we present two applications,
implemented on a social robot in order to perform
mental and physical exercise together with elderly
people. Furthermore, we evaluated those applications
in terms of acceptance, user experience and utility.
2 RELATED WORK
There are several related projects dealing with
interaction strategies and designs of companion robots
and social robotics in the field of elderly care or
common care.
The objective of the EU project ACCRA (Agile
Co-Creation of Robots for Ageing) (Fiorini et al,
2019) is the creation of advanced robotics-based
solutions in order to extend active and healthy ageing.
Therefore, the project developed an agile co-creation
Ruff, C., Henderson, I., Vetter, T. and Horch, A.
Mental and Physical Training for Elderly Population using Service Robots.
DOI: 10.5220/0011528200003332
In Proceedings of the 14th International Joint Conference on Computational Intelligence (IJCCI 2022), pages 435-444
ISBN: 978-989-758-611-8; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
435

development process and defined a four-step
methodology. The applications developed by the
projects were implemented on two types of robots: (1)
Astro, a large assistive robot platform, and (2) Buddy
(Guiot et al., 2020) a small-sized companion robot.
The project HAPPIER (Wieching, 2019) (Healthy
Ageing Program with Personalized Interactive
Empathetic Robots) ( aims to support healthy and
active aging in the fields of (1) communication and
participation, (2) health and prevention and (3)
security and data protection. In order to reach the goals
the project uses different assistance robots for various
purposes. The robots are connected with the Internet
of Things (IoT) by a secure cloud-based system.
The Care-O-bot (Graf, B et al., 2009) (care-o-
bot.de) is a robot platform designed to support humans
in their home environments in an active and social
way. The platform implements different interaction
strategies for human robot interaction in order to be a
supportive service robot. The interaction strategies
include social manners for different types of humans,
such as elderly or younger people.
In contrast to the projects mentioned above the
goals of the NIKA project are (1) the creation of
interaction patterns for human robot interaction as
well as (2) the development of a middleware to
provide and use the patterns on different robot
platforms. The patterns are used in two different types
of applications on three different kinds of robots
(iRobot Roomba, MiRo, Pepper). In this paper, we
will introduce the designed applications to show how
they can be used to support elderly people with mental
and physical exercise.
3 PROJECT “NIKA”
The work presented in this paper was developed as
part of the Project “NIKA”, funded by the Federal
Ministry of Education and Research. NIKA explores
the use of social service robots in the context of elderly
care. This setting can be especially challenging, as
many elderly people rarely come in contact with new
technologies (like robots) and are not what is
commonly referred to as “digital natives”.
Additionally, elderly people often suffer from
physical impairments, such as hearing or visual
impairments. Designing the interactions and
applications in an accessible, non-threatening and
enjoyable way is therefore of utmost importance.
Thus, we chose an iterative design and
implementation process with several revisions of our
system and applications to address these challenges.
Using real life feedback from the target audience, we
were able to better adapt the system to the needs and
requirements of the elderly people. The evaluation
was carried out in a partnered elderly care institution
with clients of day-care and stationary.
4 USE-CASES
In collaboration with a partnered care-giving
institution, we conducted workshops to identify two
distinct use-cases and activities based on the
following key factors and criteria:
1. The application must provide benefit to the
clients of care institutions
2. The application must support care-givers by
taking over specific, time consuming tasks
3. The application must be acceptable for staff
and clients to work with
4. The application must be hold up to ethical
standards
Out of several potential applications of service
robots in elderly care, the application of mental and
physical exercise were identified as the most
important, advantageous, and well suited for the use
of social companion robots.
4.1 The Robot Platform
Pepper is the world’s first social humanoid robot
designed by Aldebaran Robotics, and released in 2015
by SoftBank Robotics
(https://www.softbankrobotics.com/) (SoftBank
acquired Aldebaran Robotics in 2015), which was able
to recognize faces and basic human emotions. Pepper
was optimized for human interaction and is able to
engage with people through conversation and his
touch screen. In addition to the recognition of human
emotions, Pepper is able to perform a wide variety of
actions with its head, arms, and body movement.
Figure 1: The robot "Pepper".
ROBOVIS 2022 - Workshop on Robotics, Computer Vision and Intelligent Systems
436

The robot is controlled by a dedicated, linux-
based operating system NAOqi. It contains several
modules that comprise the library, enabling the
developer to control the robot’s resources. The
NAOqi system of the Pepper robot is generally
identical to the NAO robot’s NAOqi, so switching
from working with NAO to working with Pepper is
straightforward. Pepper seems to be one of the best
options for implementing and research on Human
Machine Interface (HMI), due to the sensors,
technologies and functionalities included in its design
and pre-programmed in a form of an API (application
programming interface). A significant advantage of
this design is its full programmability, with access to
sensors (cameras, infrared) and speech synthesis and
recognition.
5 MENTAL EXERCISE
APPLICATION
Aging is associated with changes in cognitive
function and decline in performance on cognitive
tasks, including processing of information, decision-
making, working memory and executive cognitive
function. Exercise of mental and cognitive abilities
may decrease the rate of cognitive decline seen with
aging (Murman, D., 2015) and is therefore regularly
offered as an activity in elderly care facilities. In order
to explore the possibility and evaluate the usefulness
of using a service robot to conduct those exercises,
we designed and implemented a mental exercise
application.
Concept. The mental exercise application was
designed as a multi-media quiz application (Figure 2).
The quiz format was used, as the concept and process
is familiar to most people. In order to facilitate
evaluation and avoid exhaustion or stress by the
participants, the quiz was designed to have rounds of
ten questions without any time limits. Questions are
grouped into several themed categories and three
difficulty settings.
The quiz supports different question formats, such as:
• Text – simple text question
• Image - text question with additional image
• Image questions - three images to choose
from
• Music/sound - a sound media file is played
with a textual question on the screen
The different question formats enhances exercise by
activating different brain regions. It also creates a
more interesting game experience for the users.
Figure 2: Quiz category selection screen, with categories:
“general”, “music”, “sport”, “nature&animals,
“engineering”, “history”, “literature”, “Film&TV”.
Biography Work and Personalization. Biography
work is a concept to improve cognition and promote
social participation (Corsten and Lauer, 2020)
(Specht-Tomann, M. 2017) often used in elderly care.
Biography work shows potential for the prevention
of mental pathologies, especially in older,
institutionalized adults (Elias et al., 2015).
To further promote mental wellbeing and increase
participation we integrated this concept into the quiz
application. Ten interviews were conducted with
participants of our evaluation study to gather their
biographic information and interests. Based on this
information, lists of questions (text, image and music)
were compiled, specific to each user (Figure 3).
Figure 3: Quiz question screen – Question: “What´s the
name of this musical instrument? (as shown in the picture).
Game Flow. When the application is started, the user
has to select his or her name, a selection for a quiz
category and the corresponding difficulty setting are
being displayed on the tablet screen, mounted on the
robot. After selection, the quiz content is downloaded
from a server and the quiz starts. The flow chart in
Figure4 shows how the game flow was designed.
Mental and Physical Training for Elderly Population using Service Robots
437

Figure 4: Mental exercise game flow.
6 PHYSICAL EXERCISE
APPLICATION
Concept: The gameplay for this application is based
on games like activity, charade or pantomime. They
are usually played by one or more teams, where each
team consists of at least two people. At the beginning
of each turn, a countdown starts (e.g. by a timer or
hourglass). One player of the team whose turn it is
draws cards from a deck. Each of those cards has a
term written on it. The player then has to pantomime
so that the other team members can recognize it and
guess the correct term. If the guess is correct, the team
gains points. This is repeated until the time runs out.
In the end, the team with the most points wins the
game.
In the current prototype, Pepper robot takes over
the part of the opponent team in performing and
recognizing actions, which, in turn, requires the
human player to mime them and vice versa. The
performing and recognizing actions of pepper are
classified as Round1 and Round2. The score
Figure 5: Charade game flow.
mechanics and the countdown have been dropped as
well. Below, these simplified game rules are
described as seen from the viewpoint of Pepper. A
visual diagram of the simplified game is shown in
Figure 4.
Explanation of Design Flow. When the application
is started, Pepper uses its face detection capabilities
and waits, until a person walks into its field of view
(FOV). If a person is detected, he or she is verbally
invited by the robot to 8 play a game of charade. If
the potential player refuses the invitation, Pepper
goes back into the waiting state until another face is
detected. In Round1, the robot performs one of the
following actions, namely: Violin, Drums, Padding,
Piano, Telephone, Tennis, Weightlifting, and
Guitar, which were
Figure 6: Charade Game activity selection, featuring
activities: “boxing”, “playing the violin”, “drumming”,
“rowing” and “guitar”.
ROBOVIS 2022 - Workshop on Robotics, Computer Vision and Intelligent Systems
438

stored as so called “behaviors” in the Pepper
operating system. After performing the
corresponding action, Pepper gives the opportunity
for the human player to reply via voice command.
The backend program uses speech recognition to find
the correct answer based on the human player’s reply.
In Round2 the robot gives a short instruction on how
the Round2 is played. Afterwards, the list of possible
activities to mime are displayed on the robot’s tablet,
showing an illustration of the possible actions (see
Figure 6).
Figure 7: Performing the "boxing" activity.
Figure 8: Participant performing "violin" activity.
This approach was chosen in order to have a uniform
system that does not require external components,
such as game cards. As a next step, the robot adjusts
its camera, so that the human player’s upper body is
located in the center of the captured image data. This
step is essential, otherwise the body parts important
for the human action recognition (HAR) (i.e. the arms
and the upper body) might not be visible, making
recognition much less accurate. Furthermore, in
combination with face detection, it ensures that the
user is visible from a frontal perspective. After
adjusting the camera, Pepper indicates to the player to
start with the performance of the previously selected
activities by counting downwards from 3.
Subsequently, the user is recorded by the robot’s
camera and the data is processed as described in the
subsection below. Using the extracted features, the
classification is conducted. Pepper then vocalizes its
guess and asks for confirmation. If the probability,
returned by the HAR system, is too low, the robot
notes that it is unsure about the correctness of its
guess. Depending on the correctness of the answer by
the human player, Pepper gives a positive or negative
response. Regardless of whether the action has been
classified correctly or not, the player is asked if he or
she wants to play another round. If so, the application
goes back to the point where the user has to choose
an action. Otherwise, Pepper says its farewell and the
application stops.
The Human Action Recognition System. A
fundamental challenge that arises in recognizing
human actions is variability. Human movements can
be influenced by multiple factors. Sheikh identified
three important reasons that can result in large
variability (Sheikh et al., 2005): (1) viewpoint, (2)
execution rate and (3) anthropometry of actors. In our
application specifically, age can greatly affect the
way elderly people move. Compared to younger
people, the elderly move differently in terms of
velocity, flexibility and smoothness of motion. This
may especially have an effect on the variability of
execution rate as elderly people may perform an
action more slowly.
We implemented a HAR system (Ponzer 2020),
which is used for action recognition during the
execution of the simplified charade game. The
recognition is bound by the following constraints that
result from the use-case:
Indoor Environment. In the course of the NIKA
project, Pepper is only used in indoor environments,
such as care facilities and assisted living homes.
Accordingly, recognition has to focus on indoor
situations.
One Person in FOV. During the course of
implementation it was assumed that only one person
is standing in front of the robot. Therefore, no
Mental and Physical Training for Elderly Population using Service Robots
439

segmentation was necessary in order to extract the
image segment containing the player.
Frontal Perspective. The HAR system is designed
under the assumption that the player is looking at
Pepper and his or her body is positioned in front of
the robot, as argued by Fasola and Mataric (Fasola
and Mataric, 2013). The pipeline of the HAR system
introduced below is divided into three main parts.
Firstly, in the pre-processing step, the video frames
are passed on to OpenPose (Z. Cao et al., 2019) in
order to extract human skeletons from the images.
Secondly, taking the skeletons as input, feature
extraction is conducted. Thirdly, the features are
encoded and classified by combining the global
alignment kernel (GAK) with a multi-class Support
Vector Machine (SVM). The pipeline is also shown
in Figure 9.
Figure 9: Player activity recognition pipeline.
Pre-Processing. The pre-processing step described in
this subsection and is applied in order to bring the raw
video frames into a format that can be used for further
processing. In 1973, Johansson (Johansson, 1973)
inspected the visual representation of human motion
patterns. His work, which is considered a milestone
in the research of skeleton analysis (Saggese et al.,
2019), concluded that human actions can be
adequately described by the appropriate selection of
10-12 joints. Therefore, joint locations or joint angles
offer a rich source of information for vision-based
HAR (Poppe, 2010).
Training of the Human Action Recognition
System. The machine learning approach of the HAR
system involves the two stages: training and testing
(Lara and Labrador, 2013). The following section
describes the process of training in more detail.
In the training phase of the HAR model, the
sequences of the charade dataset for elderly people
was recorded with participants during the project are
used as samples. The dataset consists of 300 samples
for each of the five classes: boxing, drums, guitar,
paddling and violin. The time-consuming task of
extraction of 2D skeleton data, every time the training
is executed, has been completed beforehand, using
the OpenPose framework. Before the execution of the
training phase, the dataset was split up, as proposed
by (Chicco, 2017). 20% of the samples are withheld
for the evaluation phase while the remaining 80%
were used for training of the classifier. Accordingly,
the model is trained on 1200 samples and tested on
300 samples. In order to test under conditions that are
similar to the planned use-case, the split between
training and testing data was done at the level of the
Figure 10: Open pose derived skeleton.
individual actors. Thus, each actor, is either in the
training, or in the test set.
For the purpose of classification, the recognition
system, as described in Figure 9, is composed of a
multi-class SVM. For measuring of the similarity
between the time series, the SVM is combined with
the GAK as the kernel. Although the improved
version of the GAK, namely the Triangular Global
Alignment Kernel (TGAK), can be computed faster,
this comes at the cost of accuracy. As mentioned in
the previous section, with the large amount of data
used for training as well as during the application’s
execution, the GAK’s computation is still possible in
a reasonable time frame. We therefore, chose to use
the original kernel. The input for the classifier is
windowed to a length of 50, which means that the
concatenated features of 50 consecutive frames are
used to represent one sample.
Performance Results of our HAR Model using the
Charade Dataset. The performance results of the
proposed model are summarized in the following
table. It contains the corresponding evaluation scores
for each class, namely precision, recall and the F1-
score. The average accuracy over all classes on the
test set is 6% less than on the training set, i.e. 84.4%
instead of 90.4%.
ROBOVIS 2022 - Workshop on Robotics, Computer Vision and Intelligent Systems
440
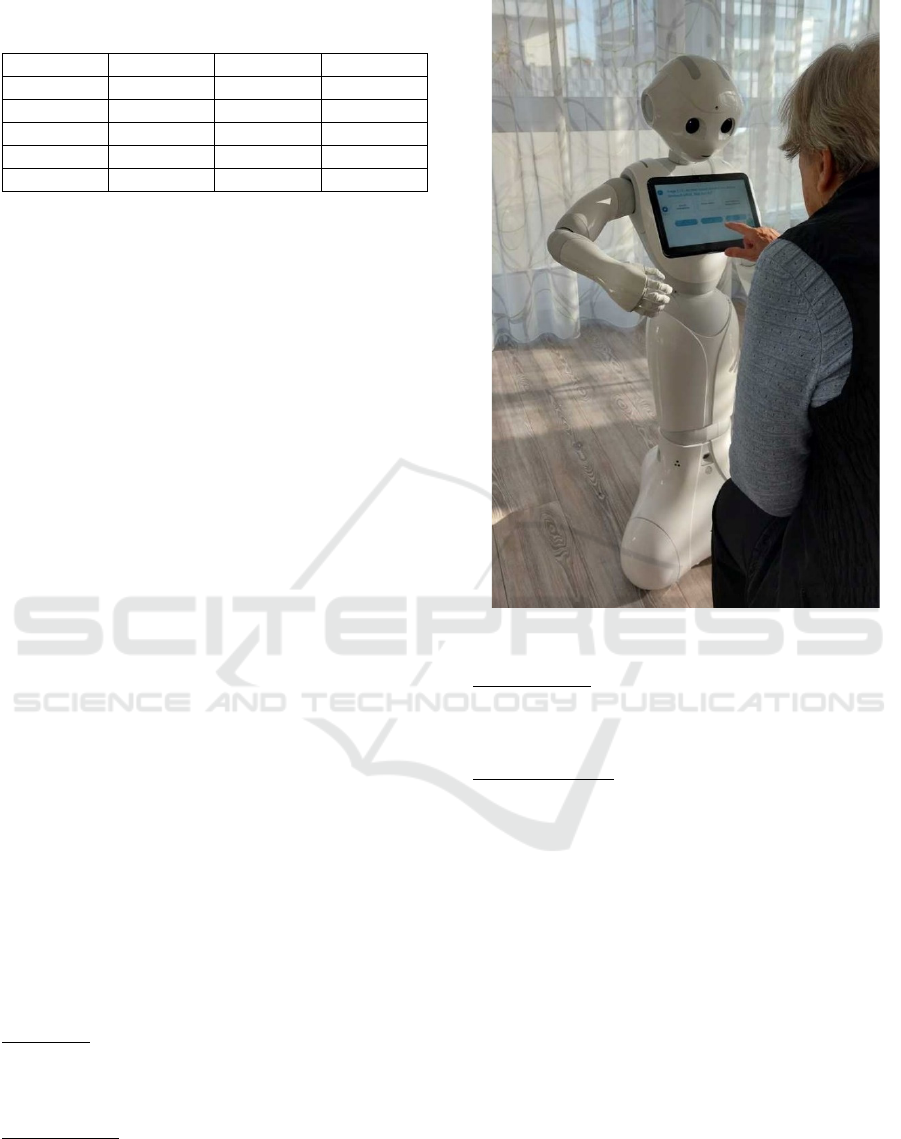
Table1: Precision, Recall and F1 Score of the different
activities.
Precision Recall F1-Score
Boxin
g
0.77 0.95 0.85
Drums 0.81 0.77 0.79
Guita
r
0.90 0.70 0.79
Paddlin
g
0.98 1.00 0.99
Violin 0.79 0.80 0.80
7 EVALUATION
The evaluation was considered one of the most
important phases of the NIKA project as it offered the
opportunity to gather real world data about use of
humanoid service robots in elderly care settings. It
was carried out in several iterations with focus on
different aspects. The main goal of the evaluation was
to examine the feasibility of the technology, e.g.: Is it
possible to run the applications smoothly on site
under real world conditions with current state of the
art robots? Furthermore, the interaction of the senior
citizens with the robots and the usability of the quiz
and charade applications were examined.
Since the Quiz and Charade applications were
mostly focused on helping the mental and physical
activity of elderly people, most of the evaluation took
place in an elderly home of the partnered Elderly Care
organization “Wohlfahrtswerk für Baden-
Württemberg”.
As the project was carried out during the global
covid pandemic, the originally planned evaluation
had to be adapted to the circumstances. For this
reason, the first evaluation phase was done during the
lockdown phases, with questionnaires sent to the
participants and without direct robot interaction. The
objective was to gather information about the needs
and opinions of the elderly people in regards to the
interaction with service robots and our specific use-
cases.
Evaluation Timeline: From January to December
2021, a total of four evaluations were conducted in a
care facility of the Wohlfahrtswerk organization.
April 2021: First iteration of the cognitive activation
"Quiz" (5 participants). The participants each played
two rounds of quizzes, in which they could choose
one category each.
August 2021: Second iteration of the cognitive
activation "Quiz" (15 participants). The participants
each played two rounds of quizzes, in which they
could choose one category each.
Figure 11: A study participant playing the quiz game.
October 2021: First iteration of physical activation
"Charades" (10 participants). Participants played one
round of charades (6 movements in total) and were
allowed to choose whether to play a second round.
November 2021: Third iteration of the cognitive
activation "Quiz" (10 participants). The participants
played two rounds of the quiz. In the first round, they
could choose a category. The second round was "My
personal quiz," in which the content from the pre-
interviews was personally created. An observation
sheet was used to record social, physical, and
cognitive activity, as well as mood and well-being.
Likewise, any technical issues were recorded so they
could be ironed out for the next iteration.
Participants: In the run-up, the participants were
acquired with the help of flyers and with the support
of the social service management and fixed
appointments were assigned. The selection was based
on the following criteria:
at least 65 years old
home care environment
interest in technology and basic
understanding
no major cognitive impairments
Mental and Physical Training for Elderly Population using Service Robots
441

ability to read and write (if necessary by
means of aids)
Equal gender and age distribution was also taken into
account. In order to ensure comparability of the
results, the same persons were asked again for the
following iterations. Each participant was given the
same time window of 60 minutes.
Methods: The following methods were used in the
evaluation:
Pre-interview (only for third quiz evaluation
in November ‘21).
Questionnaire (pre-evaluation)
Observation
Questionnaire (post-evaluation)
Pre-Interview: A special feature of the quiz concept
is the possibility of personalization, i.e., tailoring
question content to one's own interests and
biographical events. In order to be able to evaluate a
very high degree of personalization, the participants
were interviewed in advance and a personal quiz was
generated from their answers.
Questionnaire (pre-evaluation): After welcoming
the participants, they were asked about their socio-
demographic data (age, gender, etc.), interest in
technology and awareness of robotics before using
the robot. For the charade use-case, questions about
physical activity were also included.
Observation: After the survey, the participants were
given a short introduction to the system (quiz or
charade) and could test the system independently.
Questionnaire (post-evaluation): After playing the
quiz, the participants were asked about their
experience of use with the help of a questionnaire.
a) Questionnaire on the quiz: This consisted of a
part on the quiz (including the use of the Game
Experience Questionnaire in August and
November), on usability (System Usability
Scale) and questions on the use of the robot
assistant. The questionnaires of the three
iterations were similar except for the addition of
the GEQ from August and further questions on
the use of the assistant robot.
b) Questionnaire on the charade: This consisted
of a part on the charade (among other things,
survey of activity and fatigue after the charade,
Game Experience Questionnaire). Likewise, the
usability was surveyed by means of the System
Usability Scale. Finally, questions about
potential usage were also asked here.
The iterative approach enabled the project team to
incorporate user feedback directly into the system
after evaluation. Thus, technical problems could be
identified and solved and the quiz concept could be
adapted and improved. Even though only one
iteration was possible for the charade, the system
could be further developed with the help of this.
The questionnaires contained both quantitative
and qualitative items. The quantitative data were
analyzed and presented descriptively. The scales used
(GEQ and SUS) were evaluated according to the
specifications. The qualitative evaluation was carried
out by means of a descriptive interview analysis, in
which the statements in own words are classified in
selected outlines by means of paraphrasing. The data
was transcribed and analyzed using Mayring's content
analysis (Mayring, 2004). The results were discussed
with the partners promptly after the iteration in order
to be able to incorporate important findings into
further development and the next iteration.
8 RESULTS
In summary, the system (Pepper with quiz/ Pepper
with charade) was very well received by the users.
The SUS score of the System Usability Scale was
always in the range of "good to excellent" (80 to 100
points) for the quiz and in the range "good" for the
charade. Overall the quiz application reached higher
scores in terms of enjoyment (Figure 12, 13) by the
majority of participants.
These results need to be contextualized with the fact
that the concept of the charade game was mostly
unknown for the participants, contained more
advanced game mechanics and technologies
(computer vision, machine learning), limited by the
robots functionalities and thus was more prone to
errors (e.g. in the detection of the user actions and
speech recognition). In contrast, most participants
were used to playing quiz games from real life
experience or mobile device apps and understood the
concept and their required actions much more
intuitively.
The results of the GEQ of both applications are
presented in Figure 14. Overall, the experience
evoked little negative feelings or tension but high
feelings of immersion with a positive affect.
ROBOVIS 2022 - Workshop on Robotics, Computer Vision and Intelligent Systems
442

Figure 5 - Overall quiz game evaluation
For the charade game, the users reported our
pre-defined user activities as well suited, but would
like to include more everyday activities (i.e. drinking
water, eating, playing cards, etc.) that especially older
Figure 12: Overall quiz game evaluation.
Figure 13: Overall charade game evaluation.
participants can relate to. Regarding the activities that
the robot performed, the activities of playing the
violin and the guitar were regarded as hard to
distinguish. In addition, the sluggish movements of
the robots were sometimes criticized (mostly a
limitation of the robotic platform used).
Due to the number of participants in our studies,
they cannot be considered statistically significant.
Nonetheless, our results yield interesting insights into
the real world application of the use of service robots
in elderly care for different use cases. More
researched is needed to validate these results using
bigger sample sizes and longer-term application.
Figure 14: Game Experience Questionnaire Results.
ACKNOWLEDGEMENTS
The NIKA project was funded by the German Federal
Ministry of Education.
REFERENCES
Federal Statistical Office. DeStatis. Retrieved June 8, 2022,
from https://www.destatis.de/DE/Presse/
Pressemitteilungen/2021/09/PD21_N057_12411.html
Federal Statistical Office. DeStatis. Retrieved June 8, 2022,
from https://www.destatis.de/DE/Themen
/GesellschaftUmwelt/Gesundheit/Pflege/Tabellen/pers
onal-pflegeeinrichtungen.html
Fiorini, L., D’Onofrio, G., Limosani, R., Sancarlo, D.,
Greco, A., Giuliani, F., Kung, A., Dario, P., & Cavallo,
F. (2019). ACCRA Project: Agile Co-Creation for
Robots and Aging. Lecture Notes in Electrical
Engineering, 133–150.
Denis Guiot, Marie Kerekes, & Eloïse Sengès. (2020,
February 28). Living with Buddy: can a social robot
help elderly with loss of autonomy to age well?. IEEE
RO-MAN Internet Of Intelligent Robotic Things For
Healthy Living and Active Ageing, International
Conference on Robot & Human Interactive
Communication, 14 October 2019, New Delhi, India
Rainer Wieching, Projekt HAPPIER (Healthy Ageing
Program with Personalized Interactive Empathetic
Robots), (DAAD 2018-2019) Website:
https://www.wineme.uni-siegen.de/projekte/happier/
Graf, B., Reiser, U., Hagele, M., Mauz, K., & Klein, P.
(2009). Robotic home assistant Care-O-bot3 - product
vision and innovation platform. 2009 IEEE Workshop
on Advanced Robotics and Its Social Impacts.
https://doi.org/10.1109/arso.2009.5587059
Murman, D. (2015). The Impact of Age on Cognition.
Seminars in Hearing, 36(03), 111–121.
https://doi.org/10.1055/s-0035-1555115
Corsten, S., & Lauer, N. (2020b). Biography work in in
long-term residential aged care with tablet support to
improve the quality of life and communication – study
protocol for app development and evaluation /
International Journal of Health Professions, 7(1), 13–
23. https://doi.org/10.2478/ijhp-2020-0002
Specht-Tomann, M. (2017). Biography work: in health
care, nursing and geriatric care. Springer-Verlag.
Elias, S. M. S., Neville, C., & Scott, T. (2015). The
effectiveness of group reminiscence therapy for
loneliness, anxiety and depression in older adults in
long-term care: a systematic review. Geriatric Nursing,
36(5), 372-380.
J. Fasola and M. J. Mataric. “A Socially Assistive Robot
Exercise Coach for the Elderly”. In: J. Hum.-Robot
Interact. 2.2 (June 2013), pp. 3–32. doi: 10.5898/
JHRI.2.2.Fasola.
Z. Cao, G. Hidalgo, T. Simon, S. -E. Wei and Y. Sheikh,
"OpenPose: Realtime Multi-Person 2D Pose Estimation
Using Part Affinity Fields," in IEEE Transactions on
Pattern Analysis and Machine Intelligence, vol. 43, no.
1, pp. 172-186, 1 Jan. 2021, doi:
10.1109/TPAMI.2019.2929257.
Gunnar Johansson. “Visual perception of biological motion
and a model for its analysis”. In: Perception &
Psychophysics 14.2 (June 1973), pp. 201–211. issn:
1532-5962. doi: 10.3758/BF03212378.
Mental and Physical Training for Elderly Population using Service Robots
443

Y. Sheikh, M. Shah, and M. Sheikh. “Exploring the space
of a human action”. In:Tenth IEEE International
Conference on Computer Vision (ICCV’05) Volume
1.Vol. 1. Oct. 2005, 144–149 Vol. 1.
Ponzer, J., (2020) Design and implementation of an
application for the physical activation of elderly people
using a service robot, [Master's Thesis, University of
Applied Sciences Würzburg-Schweinfurt]
Alessia Saggese et al. “Learning skeleton representations
for human action recognition”. In: Pattern Recognition
Letters 118 (2019), pp. 23–31.
Ronald Poppe. “A survey on vision-based human action
recognition”. In: Image and Vision Computing 28.6
(2010), pp. 976–990. issn: 0262-8856
O. D. Lara and M. A. Labrador. “A Survey on Human
Activity Recognition using Wearable Sensors”. In:
IEEE Communications Surveys Tutorials 15.3 (Third
2013), pp. 1192–1209. issn: 2373-745X.
Davide Chicco. “Ten quick tips for machine learning in
computational biology”. In: BioData mining 10.1
(2017), p. 35.
Mayring, P. (2004). Qualitative content analysis. A
companion to qualitative research, 1(2), 159-176.
ROBOVIS 2022 - Workshop on Robotics, Computer Vision and Intelligent Systems
444
