
Training with a Pneumatic Assist Suit to Generate Lower-Body
Twisting during the Forehand Swing in Table Tennis
Akihiko Kashiwagi, Hayato Nakamura, Satoshi Nishikawa
a
and Kazuo Kiguchi
b
Faculty of Engineering, Kyushu University, 744 Motooka, Nishi-ku Fukuoka, Japan
Keywords: Pneumatic Actuator, Wearable Robot, Sports Support.
Abstract: Movement form is important in sports. However, self-learning of the form has a possibility that people will
acquire a form which puts a burden on one part of the body or a form which cannot exert sufficient power.
Although there is also a way to have an instructor, people do not always receive the instruction of the form.
Therefore, it is useful for sports training to develop a device which allows participants to acquire a form suited
for each sport. Existing research about support in sports with a racket does not pay much attention to the lower
body. In this research, we developed an assist suit that assists the lower body in executing a forehand swing
in table tennis with lower-body twisting. Using this suit for beginners of table tennis, we conducted
experiments under four conditions:(1) "No wear (before)", (2) "Without assist", (3) "With assist", and (4) "No
wear (after)". As a result of Tukey analysis within each participant, the range of movement of the lower body
is statistically increased by the assist suit and there are individual differences in whether to acquire a swing
with twisting the lower body.
1 INTRODUCTION
1.1 Background
Exercising in sports is one of the effective ways of
maintaining physical health and reducing stress.
However, a lot of learning and practice time is
required for beginners to master how to move their
bodies in each sport (Wulf & Shea, 2002).
As a training method for sports at present, two
typical examples are considered: self-learning like
using some services such as a pitching machine and
guidance by an experienced person. In the case of
self-learning, however, there is a possibility that a
beginner will acquire such as a form that puts a
burden on only one part of his/her body or a form that
is difficult to transmit force. Also, in the case of
guidance by an experienced person, an experienced
instructor is necessary. From the above, it is
considered that it is necessary to make a device that
can help a beginner acquire an ideal form. In this
research, we focused on table tennis, which is popular
with a wide range of ages, to investigate the
supporting method for the training of forehand swing.
a
https://orcid.org/0000-0003-0905-8615
b
https://orcid.org/0000-0003-4408-0420
1.2 Previous Research
To provide efficient sports support, it is necessary to
understand the parts of the body that greatly affect
sports movements. In previous studies of golf (Evans
& Tuttle, 2015) and tennis (Gordon & Dapena, 2006),
it is shown that waist twisting exercise is important.
Qian et al. investigated differences between advanced
and intermediate table tennis players in lower limb
movements during the forehand swing of table tennis.
In their research, it was found that intermediate
players rotated the hip joint and trunk lesser than
advanced players and the exercise skills of the lower
limbs were lower than advanced players (Qian et al.,
2016). Also, Zhang's study states that advanced
players have a greater range of motion during swings
and trunk twisting is important in table tennis (Zhang,
2017).
About sports support methods, it has been found
that tactile guidance is efficient to learn movement
more quickly (David & James,2009; Huang et al.,
2007). As a sport-aided device using tactile guidance,
there are robots that teach swing by controlling the
movement of tennis rackets and golf clubs (Kümmel
Kashiwagi, A., Nakamura, H., Nishikawa, S. and Kiguchi, K.
Training with a Pneumatic Assist Suit to Generate Lower-Body Twisting during the Forehand Swing in Table Tennis.
DOI: 10.5220/0011557000003321
In Proceedings of the 10th International Conference on Sport Sciences Research and Technology Support (icSPORTS 2022), pages 61-67
ISBN: 978-989-758-610-1; ISSN: 2184-3201
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
61
et al., 2014; Hirata et al., 2017). In addition, there are
studies that use wearable robots to assist in running
and swing movements (Miyazaki et al., 2021; Zhou
et al., 2021; Klein et al., 2012; Sakoda et al., 2018).
These studies supported a body part that directly
affects the action point of force. However, as
mentioned in the first paragraph of this subsection, it
is stated that the exercise of the part far from the point
of action is also an important factor in playing sports.
Therefore, it is expected that the performance will be
improved by supporting the training of the part far
from the point of action.
1.3 Purpose of Research
This study aims to achieve effective training by
developing an assist suit to help the wearer master the
form by inducing the twisting motion of the lower
body during the forehand swing of table tennis.
2 ASSIST SUIT DESIGN
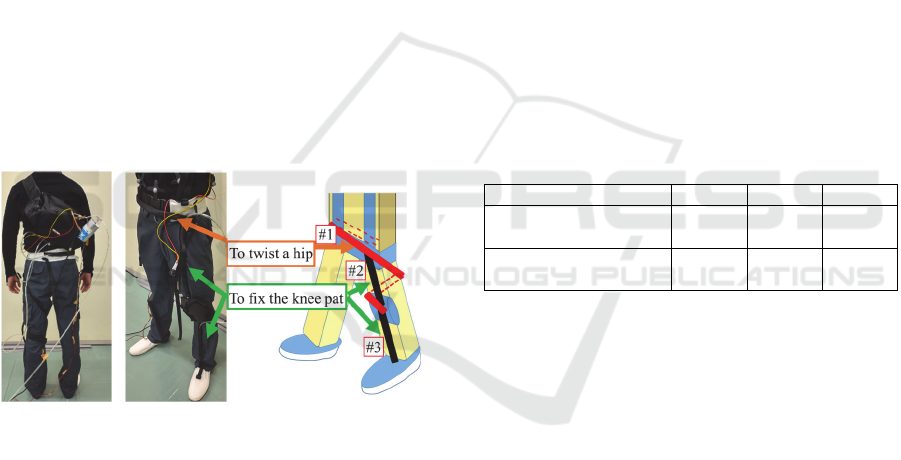
Figure 1 shows the appearance of the developed assist
suit.
A B
Figure 1: A) The back of the assist suit. B) Position of
pneumatic muscles.
2.1 Actuator
An assist suit for sports needs to be lightweight, not
interfere with movement, and be able to safely control
the exerted force of the suit. Therefore, in this study,
we adopted pneumatic artificial muscle as an
actuator. Pneumatically driven artificial muscles have
a large exerting force relative to weight, flexible
materials, and the characteristic that the exerting
force decreases as the length of the artificial muscle
decreases from the start to the end of a contraction.
By the last feature, the artificial muscle does not give
excess power. So, there is little risk of injury to the
wearer. These features are consistent with the
requirements for assist suits.
2.2 Placement of Artificial Muscles
Figure 1.B shows the placement of the artificial
muscle of the assist suit. Three artificial muscles are
used for the assist suit. To get sufficient power for the
twist of the lower body, a longer artificial muscle is
needed. Also, by increasing the length of muscle
fixed parallel to the waist, the perpendicular force for
the axis of the body is increased. By this structure, the
force for causing the twisting motion of the lower
body is enough. Considering the above, the artificial
muscle #1 shown in Figure 1.B is fixed in a way that
makes one circumference of the thigh from the knee
to the waist. To fix the knee supporter as fixing the
position of the artificial muscles, the muscles #2 and
#3 are used. Artificial muscle is fabricated using the
braided tube (DENKA ELECTRON Co., NFL-19),
and the initial diameter is 12 mm. Table 1 shows the
initial length of each artificial muscle and the length
after contraction when the internal pressure is 0.6
MPa at no load.
Table 1: Length of each pneumatic muscle (mm).
1 2 3
Normal
(0MPa)
820 315 165
Maximum contraction
(
0.6MPa
)
600 220 115
2.3 Control Mechanisms
When the push-button (ELPA (Asahi Electric) Co.,
HK-PSS04H) is pressed, a signal to open the valve is
output from the microcontroller (Arduino Co.,
Arduino Uno R3). The signal is converted to a voltage
with a DA converter (ANALOG DEVICES Co.,
AD5308), and the valve (HOERBIGER Co., tecno
basic) changes the pressure in artificial muscles to a
specific value according to the voltage. These parts
are fixed to an acrylic plate (Kuraray Co.,
COMOGLAS). Then, this control unit is put in a bag.
The total weight of the bag is 1.52 kg. The total
weight of the assist suit is 2.12 kg. Since this suit is
for right-handers, so as not to interfere with the swing
of the right hand, it was placed over the left shoulder.
In addition, air from the compressor (JUN-AIR Co.,
6-4) is stored in a tank (JC Service Co., ECO JET E)
and this tank is carried on the back. By doing this, the
time of supplying air to the artificial muscles gets
shorter. In this experiment, the participants pressed a
button with their left hand to control the internal
icSPORTS 2022 - 10th International Conference on Sport Sciences Research and Technology Support
62
pressure of the artificial muscle to rise from 0 MPa to
0.6 MPa. After 0.3 s, the air let out automatically.
3 VERIFICATION EXPERIMENT
OF SUIT EFFECT
3.1 Purpose of the Experiment
The purpose of the experiment is evaluating the effect
of the suit on beginners in table tennis by conducting
experiments with the developed suit.
3.2 Experimental Method
Table 2 shows each participant information. All
participants are right-handed. In order to evaluate the
improvement of swing ability by the suit, we used two
parameters: the amount of rotation of the waist
around the vertical axis during a swing and the
maximum racket speed.
The following four experimental conditions were
set: condition (1) to examine the participant’s swing
before training, condition (2) to examine the effect of
wearing this suit, condition (3) to examine the support
effect, and condition (4) to examine the training effect.
(1) Not wear the assist suit.
(2) Wear the assist suit without assist.
(3) Wear the assist suit with assist.
(4) Not wear the assist suit
From here, each condition will be described as (1)
"No wear (before)", (2) "Without assist", (3) "With
assist", and (4) "No wear (after)".
In each experiment, a table tennis ball launcher
(Nittaku Co., NB-1150) provided a ball 20 times. In
addition, data on the participant's swing to strike the
ball were recorded. The trajectory of balls provided
by the table tennis ball launcher was set to bounce at
a position of 495 mm in the Z-axis direction (in
Figure 2) and -365 mm in the X-axis direction (in
Figure 2) on the participant side court from the center
of the table. The ball speed was set to 3.64 m/s, the
rotation speed was set to 26.7 round/s in the upward
rotation, and the ball launch interval was set to 1.83 s.
The experiment was conducted with the approval of
the Experimental Ethics Committee of the Faculty of
Engineering, Graduate School of Kyushu University
(approval number 2021-04).
Table 2: Each participant data.
Age Sex Height
[cm]
Body mass
[kg]
Participant1 22 Male 175 60
Participant2 23 Male 166 51
Partici
p
ant3 23 Male 170 50
Partici
p
ant4 21 Male 173 61
Partici
p
ant5 21 Male 173 58
Participant6 22 Male 167 67
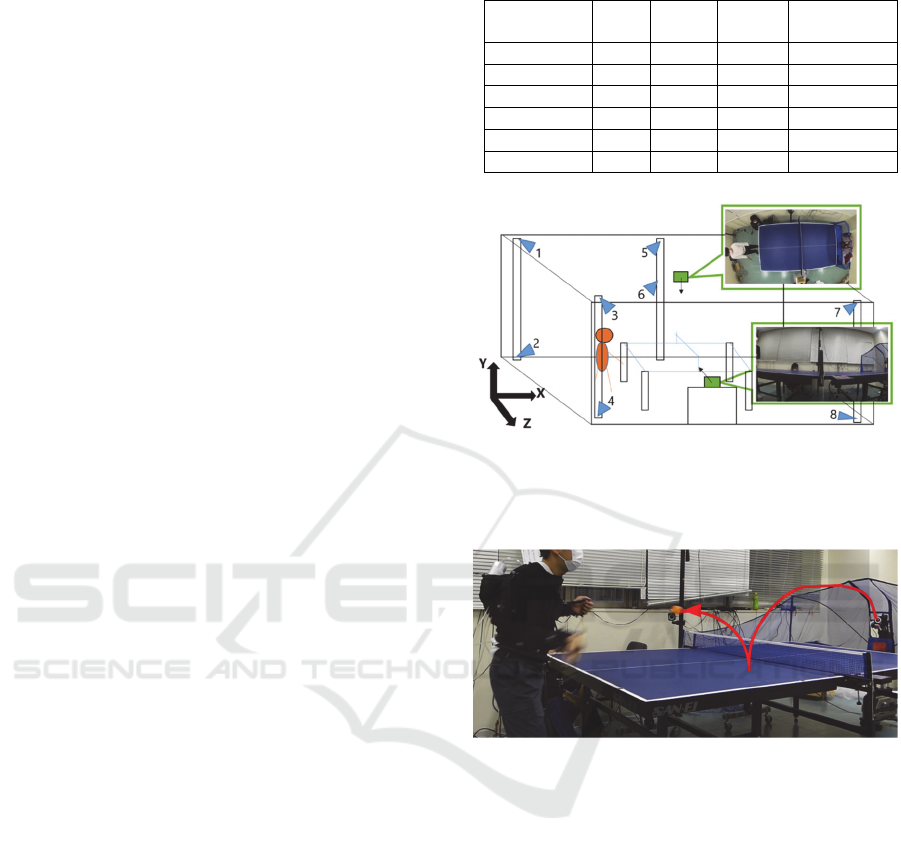
Figure 2: The Arrangement of measuring equipment. This
is a side view of the experiment room. The blue triangles
(1-8) are motion capture cameras. The green rectangles are
normal cameras.
Figure 3: The Appearance of the experiment.
3.3 Measuring Instruments and
Analysis Methods
For measurement of two parameters, we use eight
motion capture cameras (NaturalPoint Inc., Prime
13W) installed at positions 1-8 as shown in Figure 2.
Also, Figure 3 shows the experiment appearance. For
participants 1-6, the three-dimensional position
coordinates of the center of the racket defined as rigid
bodies were measured. Also, for participants 1-3, the
three-dimensional position coordinates of the center
of the waist defined as rigid bodies were measured.
For participants 4-6, the three-dimensional position
coordinates of upper body skeleton were measured.
The sampling rate was 100 Hz.
The amount of rotation around the vertical axis of
the waist was calculated based on the measured value
of the Euler angle in the Y-axis direction of the rigid
Training with a Pneumatic Assist Suit to Generate Lower-Body Twisting during the Forehand Swing in Table Tennis
63

body. In addition, the racket speed was calculated by
dividing the moving distance of the racket between
frames by the time between frames. Regarding the
amount of rotation of the waist, the minimum value
of the angle around the Y axis was defined as the start
of the waist rotation and the maximum value of the
angle around the Y axis was defined as the end of the
waist rotation. Also, the angle difference between the
start and end of the waist rotation was calculated as
the rotation amount of the waist. About the racket
swing, the minimum value of the X coordinate was
defined as the start of the swing and the minimum
value of the Z coordinate was defined as the end of
the swing. Also, the maximum racket speed was
examined in the swing.
To investigate the effect of the suit, the amount of
waist rotation and the racket speed between the
conditions were compared. First, using the mean of
20 trials with each condition in each participant, four
conditions were statistically compared by paired t-test
with the Bonferroni correction. Second, the Tukey
method was used to statistically compare four
conditions within each participant for detailed
analysis. The significance level was set to
p < 0.05.
4 EXPERIMENTAL RESULTS
4.1 Analysis across Participants
Figure 4 shows the waist yaw angle of all participants.
Figure 5 shows the racket speed of all participants. In
the comparison of waist yaw angle between "With
assist" and "No wear (after)", there was a significant
decrease.
Figure 4: Waist yaw angle of each condition (Bonferroni
method *: p<0.05 **: p<0.01). Each plot shows the mean
of 20 trials with each condition in each participant.
Figure 5: Racket speed of each condition (Bonferroni
method *: p<0.05 **: p<0.01). Each plot shows the mean
of 20 trials with each condition in each participant.
4.2 The Amount of Waist Rotation
Figure 6 shows the results of the amount of waist
rotation within each participant. Although there was
no significant difference in the comparison between
"No wear (before)" and "Without assist" in all
participants except participant 6, there is a significant
increase in the comparison between "No wear
(before)" and "With assist", in the comparison
between "Without assist" and "With assist". In
addition, in participants 2 and 5, there is a significant
increase in the comparison between "No wear
(before)" and "No wear (after)".
4.3 Racket Speed
Figure 7 shows the results of the racket speed within
each participant. In the comparison between "No
wear (before)" and "Without assist", there was a
significant decrease in participants 1 and 6, no
significant difference in participants 2, 4 and 5, and a
significant increase in participant 3. In the
comparison between "Without assist" and "With
assist", there was a significant increase in participants
1, 2, 5 and 6. In addition, in participants 2 and 5, there
was a significant increase in the comparison between
"No wear (before)" and "No wear (after)".
icSPORTS 2022 - 10th International Conference on Sport Sciences Research and Technology Support
64

Figure 6: Waist yaw angle of each participant (Tukey method *: p<0.05 **: p<0.01).
Figure 7: Racket speed of each participant (Tukey method *: p<0.05 **: p<0.01).
Training with a Pneumatic Assist Suit to Generate Lower-Body Twisting during the Forehand Swing in Table Tennis
65

5 DISCUSSIONS
As shown in Figure 4 and 5, the analysis using the
Bonferroni method hardly showed significant change
across conditions. Therefore, Figure 6 and 7, which
shows the results of the Tukey test, is the subject of
the discussion.
5.1 Effect of Wearing the Assist Suit on
the Swing
The effect of wearing an assist suit on the swing is
examined by comparing the results of "No wear
(before)" and "Without assist". In all participants
except participant 6, there was no significant
difference in the amount of waist rotation between
"No wear (before)" and "Without assist". Therefore,
it can be said that wearing the assist suit had less
restriction on the lower body movement.
In addition, in participants 1 and 6, the racket
speed was significantly decreased in the comparison
between "Without assist" and "No wear (before)".
About this, participant 1 said there was a feeling that
the bag fixed on the back was misaligned. Based on
this opinion, in each experiment of participants 2-6,
the bag fixation was strengthened. In the result, a
significant decrease was not observed except
participant 6. Therefore, when the bag fixation was
strengthened, it is considered that wearing the assist
suit had little restriction of the upper body movement.
5.2 Support Effect for Waist Yaw
Angle
The support effect of the assist suit is examined by
comparing "With assist" and "No Wear (before)",
"With assist" and "Without assist".
In all participants except participant 6, the amount
of rotation of the waist increased significantly in the
comparison between "With assist" and "No wear
(before)". In addition, in all participants, the amount
of rotation of the waist increased significantly in the
comparison between "With assist" and "Without
assist". From this, it can be said that the purpose of
increasing the rotation of the lower body was
achieved with the developed suit.
Only in participant 6, there was no significant
difference in the amount of rotation of the waist with
the comparison between "With assist" and "No wear
(before)". In this regard, in participant 6, the amount
of rotation of the waist reduced in "No wear (after)".
So, there is a possibility that participant 6 generated
the opposite force against the support force of the
device.
5.3 Training Effect of Assist Suit
The training effect of the assist suit is examined by
comparing "No wear (before)" and "No wear (after)".
In the results of the comparison of waist rotation
amounts, there is no significant difference in
participants 1 and 4, but a significant increase in
participants 2 and 5, and a significant decrease in
participants 3 and 6.
In the results of the comparison of racket speed,
there is a significant decrease in participants 1 and 4,
a significant increase in participants 2 and 5, and no
significant difference in participants 3 and 6.
From the above, it can be said that the
improvement of the swing ability by training with the
assist suit was observed in participants 2 and 5, but
not observed in participants 1, 3, 4, and 6.
To identify whether there are any characteristics
specific to those who have benefited from the suit, the
difference between participants 2, 5 and other
participants is discussed. On considering about
difference, participant 1 whose bag on his back was
fixed weakly than other participants and participant 6
who was not able to get support with the assist suit
are excluded. In the comparison of the waist rotation
amounts of "Without assist" and "With assist", there
are significant increases in all four participants.
However, in the racket speed, there are significant
increases in participants 2 and 5. Therefore, it is
considered that participants 2 and 5 were able to
transmit the waist increase movement to the
racket.From the above, there is the possibility that this
assist suit gives a great effect to participants who are
able to coordinate the twisting motion of the waist and
the movement of the racket well.
Figure 8 shows each average of waist yaw angular
velocity in "No wear (before)" and "No wear (after)".
In participants 2 and 5 who had a training effect,
Waist yaw angular velocities of both "No wear
(before)" and "No wear (after)" were large. The same
character is also seen in participant 1. So, there is a
possibility that participant 1 got a positive training
effect if the method of fixing the bag was the same as
that of other participants. On the other hand, in
participants 1, 3 and 6, waist yaw angular velocities
of both "No wear (before)" and "No wear (after)"
were small. From this, training effect may be seen in
participants with large waist yaw angular velocities
before training. Also, increases of waist yaw angular
velocities is not seen for participants with small waist
yaw angular velocities before training.
From the above, there is a possibility that the
developed assist suit is effective by introducing a
mechanism which supports transmitting the increased
icSPORTS 2022 - 10th International Conference on Sport Sciences Research and Technology Support
66

movement of the lower body to the racket movement
and reproducing the movement with large waist yaw
angular velocity without the suit after training. In
addition, the total training time is short since
participants hit the ball 20 times for each condition.
So, it is necessary to confirm whether the training
effect will be produced even in participants with
small waist yaw angular velocity if the number and
duration of training increase.
Figure 8: Relation of the average of waist yaw angular
velocity between "No wear (before)" and "No wear (after)"
in all participants 1-6. The plots over the diagonal line
indicate increases in waist yaw angular velocities from "No
wear (before)" to "No wear (after)".
6 CONCLUSIONS
In this study, the assist suit that assists the twisting
exercise of the lower body during the forehand swing
of table tennis was developed. Then, the assistive and
training effect for table tennis beginners were verified.
As a result, it was found that the developed assist suit
can increase the twisting motion of the lower body
and there are individual differences in the
improvement of swing ability by training with the
assist suit.
In the future, the number of participants will be
increased and the changes in experimental conditions,
such as long-term training and expansion of the age
range of participants, will be conducted to evaluate
the performance of the suit more accurately.
Furthermore, it is necessary to develop a mechanism
for the wearer to be able to link the movements of the
lower and upper body.
ACKNOWLEDGEMENTS
This research was supported by JSPS Grants-in-Aid
for Scientific Research JP21K17830.
REFERENCES
Wulf, G., & Shea, C. (2002). Principles derived from the
study of simple skills do not generalize to complex skill
learning. Psychonomic Bulletin & Review. 19-4, 185-
211.
Evans, K., & Tuttle, N. (2015). Improving performance in
golf: current research and implications from a clinical
perspective. Braz J Phys Ther. 19-5, 381-389.
Gordon, B., & Dapena, J. (2006). Contributions of joint
rotations to racquet speed in the tennis serve. Journal of
Sports Sciences, 24-1, 31-49.
Qian, J., Zhang, Y., Baker, J., & Gu, Y. (2016). Effects of
performance level on lower limb kinematics during
table tennis forehand loop. Acta Bioeng. Biomech. 18,
149–155.
Zhang, Z. (2017). Biomechanical analysis and model
development applied to table tennis forehand strokes.
[Doctoral thesis, Nanyang Technological University]
David, R., James, P. (2009). Can Robots Help the Learning
of Skilled Actions?. Exercise and Sport Sciences
Reviews. 23, 1–7.
Huang, F., Patton, J., & Mussa-Ivaldi, F. (2007). Interactive
priming enhanced by negative damping aids learning of
an object manipulation task. Annu. Int. Conf. IEEE Eng.
Med. Biol. - Proc, C, 4011–4014.
Kümmel, J., Kramer, A., & Gruber, M. (2014). Robotic
guidance induces long-lasting changes in the movement
pattern of a novel sport-specific motor task. Hum. Mov.
Sci., Hum. Mov. Sci, 38, 23–33.
Hirata, Y., Shirai, R., & Kosuge, K. (2017). Position and
orientation control of passive wire-driven motion
support system using servo brakes. IEEE Int. Conf.
Robot, 3702–3707.
Miyazaki, T., Kawase, T., Kanno, T., Sogabe, M.,
Nakajima, Y., & Kawashima, K. (2021). Running
Motion Assistance Using a Soft Gait-Assistive Suit and
Its Experimental Validation. IEEE Access, 9, 94700–
94713.
Zhou, T., Xiong, C., Zhang, J., Hu, D., Chen, W., & Huang,
X. (2021). Reducing the metabolic energy of walking
and running using an unpowered hip exoskeleton. J.
Neuroeng. Rehabil. 18, 1–15.
Klein, J., Spencer, S., & Reinkensmeyer, D. (2012).
Breaking it down is better: Haptic decomposition of
complex movements aids in robot-assisted motor
learning. IEEE Trans. Neural Syst. Rehabil. Eng, 20,
268–275.
Sakoda, W., Ramirez, A., Ogawa, K., Tsuji, T., & Kurita,
Y. (2018). Reinforced suit using low pressure driven
artificial muscles for baseball bat swing. ACM Int. Conf.
Proceeding Ser, 8–9.
Training with a Pneumatic Assist Suit to Generate Lower-Body Twisting during the Forehand Swing in Table Tennis
67
