
EETAS: A Process for Examining Ethical Trade-Offs
in Autonomous Systems
Catherine Menon
1a
, Silvio Carta
2b
and Frank Foerster
1c
1
Department of Computer Science, University of Hertfordshire, College Lane, Hatfield, U.K.
2
School of Creative Arts, University of Hertfordshire, College Lane, Hatfield, U.K.
Keywords: Ethics, Design, Ethical Trade-Offs.
Abstract: Public-facing autonomous systems present society with significant ethical challenges, not least of which is
the need for stakeholder understanding and discussion of how these systems balance competing ethical
principles. In this paper we present EETAS: a structured, gamified process for obtaining stakeholder input
into the ethical balances and trade-offs which they consider it acceptable for a proposed autonomous system
to make. We describe how outcomes from the EETAS process can be used to inform the design of specified
autonomous systems, as well as how the process itself can improve stakeholder engagement and public
understanding of ethics in AI and autonomous systems. In support of this we present the findings from an
initial EETAS pilot study workshop, which shows an indicative trend of improvement in public understanding
and engagement with AI following participation.
1 INTRODUCTION
One of the most complex obstacles to public
acceptance of autonomous systems (AS) and AI is the
understanding of how competing ethical
requirements in these systems may be managed.
Standards such as BSI 8611 (British Standards
Institute, 2016) on the ethical design and applications
of AS, the IEEE guidance on ethically-aligned design
(IEEE, 2018) and the Turing Institute guidance on
understanding artificial intelligence ethics and safety
(Leslie, 2019) provide information to developers on
ethical imperatives to be satisfied by the system, but
there is very little existing guidance for either
stakeholders or developers on managing and
understanding ethical complexities and balances.
Furthermore, conversation around AI has
traditionally focused on the technology and its
capabilities, rather than the diverse ethical concerns
of stakeholders and wider society. Nonetheless,
autonomous systems cannot exist in an ethical
vacuum; rather, they will be expected to conform to
the social, legal and ethical norms of the community
in which they operate (IEEE, 2018). This is a non-
a
https://orcid.org/0000-0003-2072-5845
b
https://orcid.org/0000-0002-7586-3121
c
https://orcid.org/0000-0002-9263-3897
trivial task, as different societies – and different
stakeholders within those societies – may prioritise
ethical principles differently. For example, societies
with a relatively greater regard for governmental
authority may be comfortable with autonomous
systems which prioritise public safety over data
privacy, as demonstrated in the adoption of the
TraceTogether app in Singapore (Lee, 2020).
Similarly, stakeholders within other societies which
prioritise individual choice over public cohesion may
have an ethical preference for AS which obey user
commands even where this could compromise public
safety, such as allowing customisation, or
“individuation” into autonomous vehicle technology
(Hancock, 2019). In addition to this, societies are of
course not homogenous, and individual stakeholders
within any given society may also prioritise ethical
principles differently depending on age, class, gender
and perceived technical competence (Park, 2021).
In this paper we present a structured process for
obtaining stakeholder input into the acceptability of
ethical trade-offs in a proposed autonomous system.
This structured process enables stakeholders to
identify potential trade-offs between different ethical
Menon, C., Carta, S. and Foerster, F.
EETAS: A Process for Examining Ethical Trade-Offs in Autonomous Systems.
DOI: 10.5220/0011560900003323
In Proceedings of the 6th International Conference on Computer-Human Interaction Research and Applications (CHIRA 2022), pages 249-256
ISBN: 978-989-758-609-5; ISSN: 2184-3244
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
249

principles and to work collaboratively to identify
constraints, or limits, within which they consider
these trade-offs to be ethically acceptable. We
hypothesise that the benefits of this structured process
are two-fold: firstly that participation will improve
public understanding of, and willingness to engage
with, ethical complexities of AS and secondly that AS
designers will gain insight into potential design
choices which may be made to render the autonomous
system more acceptable to the public.
We also present an interactive tool (Figure 1)
which we have created to provide a visual
representation of the outcomes of the EETAS
process. This tool serves as a record of the public
discussion, which can be retained by end-users or
stakeholder organisations and used to illuminate
diverse public perspectives on AS ethics. In addition,
the tool can be used later in the lifecyle to
communicate the autonomous system’s ethical
prioritisations and to increase end users’
understanding of it.
In Section 2 we present a discussion of existing
literature which considers questions of ethical
prioritisation in autonomous systems. Section 3
contains our description of the EETAS process, while
Section 4 provides a description of an initial pilot
study workshop which has demonstrated an
indicative trend between participation in EETAS and
enhanced public understanding of AS. Section 5
identifies our conclusions and some steps for further
work.
2 BACKGROUND
The concept of trade-offs, or risk balancing, between
two desirable properties is well-established as a
research area. Expected utility theory (von Neumann,
1947) describes how an individual’s general attitude
to risk and benefits can change their willingness to
accept particular specified risks. Similarly, prospect
theory (Kahneman & Tversky, 1979) also allows a
more complex framing of risk perception and risk
appetite. The trolley problem (Foot, 1967) is of
course perhaps the seminal example of risk balancing,
and has informed much of the public discourse
around autonomous vehicle behaviour.
Beyond this, risk balancing as a concept is well-
explored in autonomous system development. (IET,
2019) describes trade-offs between safety and
security of cyber-physical systems, while
(Akinsanmi, 2021) considers the balancing of public
health, privacy and digital security. Within specific
autonomous domains the concept of prioritising
certain safety or ethical properties has also been
discussed: (Thornton, 2018) describes the tension
between the desire for personal autonomy on the part
of an autonomous vehicle user, and the more general
desire for fairness and public safety while (Lin, 2015)
also considers how specific actions on the part of an
autonomous vehicle – e.g. driving closer to another
car in order to give more room to a pedestrian –
transfer the risk from one segment of the population
(pedestrians) to another (other drivers). In the field of
healthcare, ethical trade-offs between privacy and
well-being are also common (Lee, 2020), (Martinez-
Martin, 2020).
Other existing work focuses specifically on trade-
offs which affect the design process. (Dobrica, 2002)
presents a comprehensive survey of trade-offs in
complex systems design, while (Goodrich, 2000)
discusses these trade-offs within an autonomous
context, specifically that of collision avoidance
systems. Similarly (Bate, 2008) considers trade-offs
more generally within safety-critical systems, while
(Menon, 2019) proposes a methodology for
developers of autonomous vehicles to justify and
communicate the ways in which their system design
has been informed by ethical trade-offs.
The benefit of using a tangible element such as the
interactive tool in Figure 1 to test and visualise trade-
offs in real-time is supported by a large body of
literature, including (Schrier, 2019), (Rossi, 2019),
(Larson 2020). More generally, games have been
shown to be a successful vehicle for engagement with
ethics principles, especially in industry testing.
Examples include Judgment Call, (Ballard, 2019), a
game developed to help AI developers to identify
ethical questions using design fiction, as well as
MiniCode, a design fiction toolkit developed for near-
future technology designers and developers (Malizia,
2022).
Much of the existing work around autonomous
systems and AI is focused on developers, intended
either to provide them with insight into how a system
can be designed or to be used as guidance on making
ethically justifiable decisions. However, there is
comparatively little work which provides
stakeholders and end-users with an opportunity to
express their concerns around AI ethics, or to inform
the design of a proposed system by providing input
into the perceived acceptability of ethical trade-offs.
The process we describe here addresses this gap.
CHIRA 2022 - 6th International Conference on Computer-Human Interaction Research and Applications
250

3 EETAS PROCESS
In this section we describe a process for obtaining
stakeholder input into decisions about the ethical
prioritisations embedded into autonomous systems.
It is important that the EETAS process takes place
relatively early in the design of such systems, to allow
the outcomes to be fed back into the design lifecycle
and consequently enable developers to integrate
ethically acceptable behaviour into the system from
the ground up. In consequence, the system may not be
fully specified at the time the EETAS process takes
place. This is expect, and the process allows for
under-specification and early prototypes of an
autonomous system to be used.
3.1 Step 1: Provide AS Description
A participant group is selected, including developers
of the AS under consideration, proposed end-users,
regulators and members of the public. The developers
provide the group with a written, accessible
description of the AS and its relevant functions.
Appropriate descriptions may specify, for example,
that this is “an assistive robot that reminds you when
to take medication, alerts you when you have left the
oven on and engages you in conversation”. It is likely
that participants will have further questions around
the functionality of the system – e.g. “does the
assistive robot speak to me or do I access it via a
screen?” – and these should be clarified with the
developers as part of this step. As EETAS is ideally
undertaken during the early stages of development
(e.g. requirements gathering or design), it is likely
that some questions around specific functionality
cannot yet be answered. These, in turn, become the
seeds for the scenarios that teams will identify in Step
3.
3.2 Step 2: Identify Relevant Ethical
Principles
The participants are divided into teams of between 4
and 10. This follows (Curral, 2001), with the intent of
ensuring diversity of perspectives while still enabling
effective and equable dialogue. Each team is provided
with a set of pre-prepared cards listing ethical and
ethically-informed functional properties which may
be desirable for this type of autonomous system. The
ethical properties in this set have been identified from
a literature review of existing and developing
standards, including (BSI, 2016), (IEEE, 2018),
(Leslie, 2019), (National Cyber Security Centre,
2019). Some sample principles, which we used in the
initial pilot validation workshop (Section 4) are:
System promotes human physical safety
System obeys human commands
System promotes affinity with human user
System maintains data privacy
System is accurate
System is fair
System maintains human autonomy
System promotes human long-term health
We note that not all the ethical or functional
properties in the full set will be relevant for every
system, and that for specific systems there may be
additional ethical or functional properties. To address
this teams are also provided with a set of blank cards
and are encouraged to “tailor” the set of ethical
properties to discard those they consider irrelevant,
and identify any others considered relevant to this
specific system, using techniques such as
collaborative discussion, brainstorming and if-then
thinking.
3.3 Step 3: Scenario Construction
Teams are then asked to generate scenarios in which
two of the set of ethical properties are in conflict with
each other during system operation. For example, a
team may postulate a scenario where: “the user asks
their assistive robot not to remind them about
medication today, because they don’t want to take it”.
In this scenario the ethical properties of “system
promotes human long-term health” and “system
obeys human commands” are in conflict. Similarly,
allowing teams to tailor the set of ethical principles
may give rise to a scenario for a robot doctor where
the system attempts to “engender trust in the human
user” by mimicking human appearance and gestures
to make the patient feel at ease, thereby causing
conflict with another ethical property: “system does
not attempt to deceive”.
To assist in generating the scenarios, teams are
provided with a ready-made checklist of guidewords,
to be applied in turn to each of the ethical properties.
These guidewords enable teams to work
collaboratively to brainstorm scenarios, following the
principles of Hazard and Operability Analysis
(HAZOP) studies (BSI HAZOP, 2016). The
guidewords are presented in Table 1.
Teams should remember that the intent is to
identify scenarios in which two or more ethical
principles are in conflict: it is not sufficient to identify
scenarios which themselves simply represent ethical
hazards.
EETAS: A Process for Examining Ethical Trade-Offs in Autonomous Systems
251
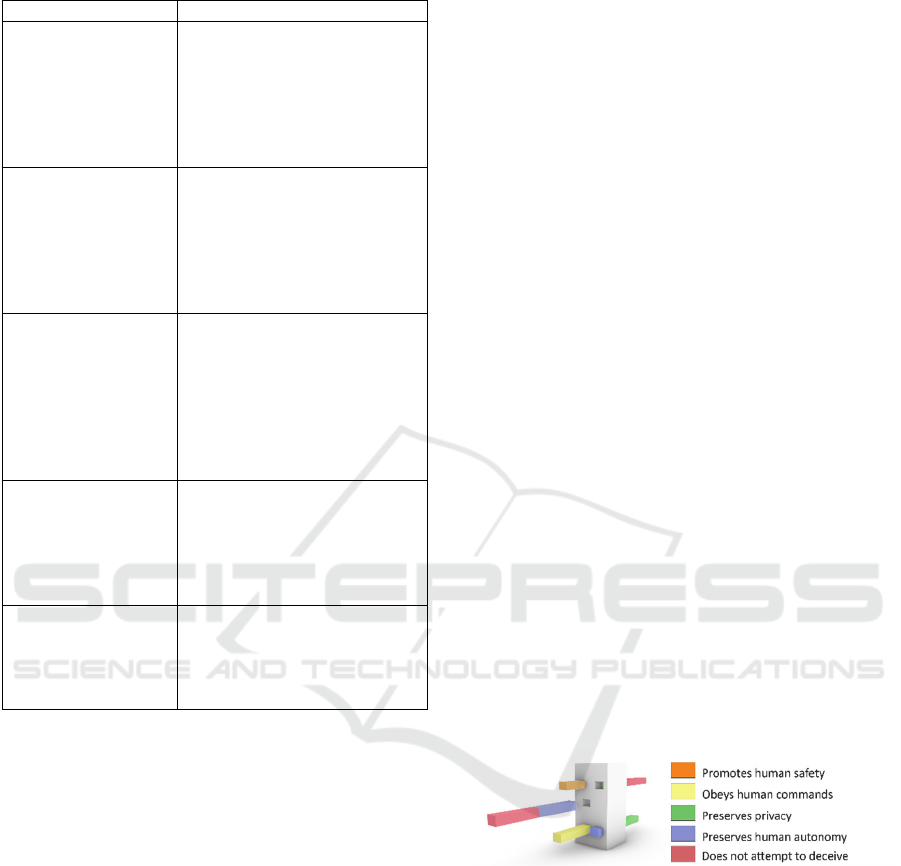
Table 1: HAZOP guidewords for EETAS.
Guide word Meanin
g
TOO MUCH Ethical conflict arising from a
scenario where the robot
performs its functions in such a
way that it grants this ethical
property to too many people /
in too many circumstances / to
too hi
g
h a de
g
ree
NOT ENOUGH Ethical conflict arising from a
scenario where the robot
performs its functions in such a
way that it grants this ethical
property to too few people / in
too few circumstances / to too
restricted a degree
UNIFORMLY Ethical conflict arising from a
scenario where the robot
performs its functions in such a
way that the outcome is
applied uniformly to
everybody / is applied in
exactly the same way to
ever
y
bod
y
INCONSISTENTLY Ethical conflict arising from a
scenario where the robot
performs its functions
inconsistently / differently for
different people / differently
each time
UNEQUALLY Ethical conflict arising from a
scenario where the robot
performs its functions such that
the beneficial outcome applies
onl
y
to some
p
eo
p
le
Participants can be encouraged to apply creativity
when identifying scenarios, and may find it helpful to
consider the following questions:
Who is the user of the system?
Who would be negatively affected in this
scenario?
Who would benefit in this scenario?
3.4 Step 4: Identify Constraints
Teams are then asked to swap scenarios with each
other. Each team then works collaboratively to
identify design, environmental or end-user
constraints under which they would accept different
ethical balances in each of the provided scenarios. To
assist in this activity, we suggest participants should
consider the following questions:
Which outcome, or balance of outcomes,
would you prefer in this scenario?
Would you accept any alternate outcome in this
scenario if users were told beforehand that this
is how the system operates? What about if the
general public were told beforehand?
Do you think the trade-off in this scenario is
appropriate given the corporate goals and
strategy of the design organisation?
Do you think the person benefitting from
different balances of outcomes in this scenario
has the moral right to do so?
Could some of the ethical trade-offs described
in this scenario be acceptable in a different
environment? With different users? If these did
not impact the same people?
Is there more information which you would
need in order to accept some of the possible
ethical trade-offs in this scenario?
To gamify this step, each team is allocated points for
every scenario in which they identify constraints that
render at least two different balances of ethical
principles acceptable. Teams should be asked to vote
on whether they think these constraints are feasible to
implement, and additional points allocated
accordingly.
3.5 Use of Design Tool
Steps 3 – 4 are to be performed with the aid of a pre-
prepared design tool, EETAS-Trade-Offs-for-You
(EETAS-TOY), which represents the AS by a solid
block and the relevant ethical principles as sliding
bars, as in Figure 1. Participants connect bars end-to-
end to represent ethical trade-offs and to discuss how
different principles may be prioritized in each
scenario.
Figure 1: The EETAS-TOY gamified tool.
Bars may be connected to other bars further down
the structure to represent where a single ethical
property (e.g. “maintains privacy”) is implicated in
multiple trade-offs (e.g. in balance with both
“maintains security” and “explains decisions”).
Should participants wish to decouple the two bars
representing these two trade-offs, this can be done by
identifying a design requirement which permits the
decoupling of those aspects of the design which can
provide privacy at the cost of security, and privacy at
the cost of explainability.
CHIRA 2022 - 6th International Conference on Computer-Human Interaction Research and Applications
252

3.6 Recording Outcomes
The outcomes of each step are to be recorded using
techniques such as mind-mapping (Beel, 2011).
These records can then be used by the AS developers
to identify further design requirements which enable
or implement the constraints identified by each team.
The EETAS-TOY tool itself may be retained by user
organizations to aid in explaining ethical trade-offs or
to act as a public record of the conversation.
4 PILOT STUDY VALIDATION
We conducted an initial pilot study workshop to
investigate participants’ perception of the EETAS
process and its effect on their own understanding of
ethical complexities in autonomous systems. As a
preliminary pilot study, this workshop aimed to
provide a partial validation of the EETAS process by
establishing a link between EETAS participation and
understanding of, and willingness to engage with,
ethical complexities of AI. A further, orthogonal, aim
of the study was to investigate the extent to which the
EETAS-TOY tool was perceived as helpful in
facilitating discussion and communication amongst
participants about the ethical complexities and
balances in autonomous systems.
The experiment was approved by the University
of Hertfordshire’s Health, Science, Engineering and
Technology Ethics Committee under protocol
number SPECS/SF/UH04940.
4.1 Pilot Study Design and
Methodology
The pilot study was carried out at the University of
Hertfordshire, with participants recruited following
self-selection into the study. After obtaining consent,
participants were randomly divided into teams of 4 –
5. The random assignment was performed by the
researchers in order to mitigate against the
confounding effects of team members knowing each
other, or sharing demographic characteristics. All
participants were provided with an overview of the
purpose of the EETAS process and the workshop, but
were not introduced to each individual step of the
process in advance, in order to avoid anticipation of
some of the discussion points.
All teams were given a high-level written
descriptive specification of the robot chosen for
consideration throughout the workshop: an assistive
robot for use in a domestic environment. Owing to
time constraints, a real-world robot prototype and
specification could not be sourced for the workshop,
and instead the specification was produced by the
researchers and based on previous work carried out at
the University of Hertfordshire Robot House (Menon,
2019), (Koay, 2020), (Saunders, 2016).
Some functionality ascribed to the assistive robot
within this written specification included:
Moving about the house in response to user
commands or actions
Reminding the user to take medication
Engaging the user in social interaction or
conversation
Notifying the user of hazardous conditions
such as the oven being switched on
Communicating with other smart device
sensors in the house, including camera, audio
and personal computers
Communicating warnings to external medical
monitoring systems regarding the health and
activities of the user
Participants were given a set of pre-printed cards
containing the eight ethical principles described in
Section 3.2. Owing to time constraints, all teams were
instructed to consider only these ethical principles
throughout the workshop and not to expand their
selction. Each team was also given an EETAS-TOY
tool (Figure 1) and shown how this could be used to
represent ethical trade-offs and balances.
Participants were provided with an initial
questionnaire and asked to provide information on
age, gender and whether they had any background
relating to either design or robotics. They were also
asked to rank the eight ethical principles in order of
how important they considered each of them to be for
the assistive robot under consideration.
Following this, teams were introduced to each
other and took part in a small ice-breaker. They were
then instructed to complete Steps 3 and 4 of the
EETAS process, Steps 1 and 2 having been completed
by the researchers (owing to time restrictions, the
HAZOP guidewords were not used). Teams were
allocated 20 – 35 minutes for each step, with the
researchers indicating when the time for each step
was nearing completion. All teams were given
structured worksheets to record their identified
scenarios (Step 3), and constraints (Step 4, following
swapping of team records).
Teams worked simultaneously in different parts
of the workshop room, with each team being observed
and monitored by one of the researchers. The
researchers were able to answer questions and remind
participants of the requirements of each step, but did
not contribute to the discussions or guide them in any
way.
EETAS: A Process for Examining Ethical Trade-Offs in Autonomous Systems
253

4.2 Post-Study Questionnaires
Following the workshop, participants were asked to
complete some further post-study questionnaires.
These included the following questions:
Participants were asked to rank the eight ethical
principles in order of how important they now
considered each of them to be for the assistive
robot
Participants were asked to give a numerical
score of how well they understood ethical
trade-offs before the EETAS process, and how
well they understood these trade-offs following
EETAS (0 = not at all, to 5 = very well)
Participants were asked to give a numerical
score of how helpful they found the EETAS
process in understanding ethical trade-offs (0 =
unhelpful, to 5 = very helpful)
Participants were asked to give a numerical
score of the EETAS-TOY tool in a)
understanding and b) communicating about
ethical trade-offs (0 = unhelpful, to 5 = very
helpful)
4.3 Pilot Study Results
As this was a preliminary study, with correspondingly
low participant numbers (<20), no statistical
significance between conditions and questionnaire
responses was expected. Nevertheless, there were
indicative trends to support our hypothesis of a causal
relationship between participation in the EETAS
process and improved public understanding of AI
ethical complexities.
4.3.1 Participant Demographics
Participant selection was strongly biased towards
both design and robotics, with 93% of participants
identifying as having a background in design, and
43% a background in robotics. This commonality in
background is due to constraints around the
recruitment and identification of participants, with
most participants sourced via existing connections to
the University of Hertfordshire. The age range of
participants was 19 – 61 years old, with the average
age being 37. The gender balance was roughly equal,
with 57% male participants and 43% female.
4.3.2 Participant Responses to EETAS
As may be expected, prior to the workshop
participants without a robotics background rated their
existing understanding of ethical trade-offs in
autonomous systems as lower (mean value 2.6) than
those with a robotics background (mean value 3.4).
Post-workshop, the gap had narrowed, with those
from a non-robotics background rating their
understanding of ethical trade-offs as an average of
3.8, compared with 4.2 for those from a robotics
background. This corresponds to an increase of 58%
greater improvement in understanding ethical trade-
offs for those without a robotics background, as
compared to those with.
Figure 2: Change in perceived understanding of ethical
trade-offs as a result of EETAS participation.
When asked to identify how helpful the process
was in understanding ethical trade-offs (0 =
unhelpful, to 5 = very helpful), 94% of participants
ranked the helpfulness of the EETAS process at 3 or
above, with the mean ranking being 3.7. Interestingly,
there was no difference noted in this result between
those with a robotics background and those without.
When asked about the helpfulness of the EETAS-
TOY tool in identifying ethical trade-offs, 64% of
participants ranked this as 3 or above (mean value
3.3) and when asked about the helpfulness of the tool
in discussing ethical trade-offs, 71% of participants
ranked this as 3 or above (mean value 3.7). In contrast
to the scores for the perceived helpfulness of EETAS,
which were independent of background, those
without a robotics background considered the tool
more helpful than those with.
Figure 3: Perceived helpfulness of the EETAS-TOY tool in
understanding and communicating.
3,4
4,2
2,5
3,8
Before
EETAS
AfterEETAS
Perceived
Understanding
Norobotics
background
Robotics
background
3,1
3,8
3,5
4,1
Understanding Communicating
ToolHelpfulness
Roboticsbackground Noroboticsbackground
CHIRA 2022 - 6th International Conference on Computer-Human Interaction Research and Applications
254

4.3.3 Observations and Timing
Three teams were each monitored by a researcher,
who recorded the total time taken for each step in the
EETAS process, and the total time spent using the
EETAS-TOY tool. Only time spent actively and
purposely using the tool in discussion was recorded,
and time spent “fidgeting” with the tool or learning
how to use it was discarded.
On average, teams used the EETAS-TOY tool
during 45% of the time they were engaged in Step 3
(scenario construction). Teams did not use the tool to
any significant extent in Step 4 (identifying
constraints). There was no correlation noted between
background in either design or robotics and readiness
to engage with the tool.
4.3.4 Discussion and Indicative Trends
Although no statistically significant conclusions can
be drawn, the results demonstrate some potential
indicative trends. Firstly, the EETAS process was
considered by a large majority of the participants to
be helpful in understanding and discussing ethical
trade-offs. This was not correlated with prior
experience: those with a robotics background found it
to be as helpful as those without. This supports our
initial hypothesis that EETAS can be used to improve
public understanding of, and engagement with,
ethical complexities in autonomous systems.
Moreover, all participants considered that their
understanding of ethical trade-offs in autonomous
systems had increased following participation in the
EETAS process. In this case the extent of the effect
could be seen to be correlated with prior experience:
those without a robotics background considered that
their increase in understanding was greater than those
with. This indicates that the EETAS process may
serve a useful purpose in raising understanding of
autonomous system ethics amongst those who have
traditionally been marginalised, or excluded from,
existing conversations around AI.
Finally, participants considered the EETAS-TOY
design tool to be useful in identifying ethical trade-
offs, and discussing these within their teams.
Observational monitoring supported an indication
that the tool appears to stimulate positive interaction
amongst participants by providing a physical aid to
visualise trade-offs. We consider it likely that the
tangible element of the tool is of value here in
supporting participants in abstract reasoning and
discussion of unfamiliar concepts.
5 CONCLUSIONS
We have presented a structured, collaborative process
for improving public engagement and understanding
of ethical complexities in autonomous systems, and
for consequently informing the design of these
systems. Our results from an initial pilot study
workshop indicate that the process improves
understanding of ethical trade-offs, most significantly
for those who do not have prior experience in robotics
or autonomous systems. Our results also indicate that
the process is helpful in stimulating debate and
discussion around ethical trade-offs, particularly
amongst groups of people who have a varied prior
understanding of the issues.
We have also considered the use of a physical
design tool, the EETAS-TOY tool, in helping
participants understand and communicate about
ethical trade-offs in a specified system. Our results
indicate that participants consider this a helpful
physical aid to concretize some of the more abstract
concepts, an effect which is more pronounced
amongst those without a background in robotics or
autonomous systems.
In terms of next steps, we plan to run a larger
workshop involving developers and a more varied
participant group (e.g. stakeholders, regulators, end-
users). We intend to use a real-world robot prototype
within this workshop, in order to assess the
effectiveness of EETAS in producing outcomes
which can be used by the developers to inform the
design of the robot.
We also plan to explore the design space of the
EETAS-TOY tool more fully. We anticipate
developing multiple versions and configurations of
the tool, in order to assess the beneficial effects of
different tools on participant understanding. New
versions will include tools with automated
mechanisms to adapt to participant choices, tools with
different shapes to assess the importance of visual
balance and tools with simplified shapes and
interaction methods to aid accessibility.
REFERENCES
Akinsanmi, T., Salami, A. (2021). Evaluating the trade-off
between privacy, public health safety, and digital
security in a pandemic, In Data and Policy 3(27).
Ballard, S., Chappell, K.M. and Kennedy, K. (2019).
Judgment call the game: Using value sensitive design
and design fiction to surface ethical concerns related to
technology. In Proceedings of the 2019
Designing
Interactive Systems Conference, pp. 421-433.
EETAS: A Process for Examining Ethical Trade-Offs in Autonomous Systems
255

Beel J., Langer, S. (2011). An Exploratory Analysis of Mind
Maps. In Proceedings of the 11
th
ACM Symposium on
Document Engineering, pp. 81-84.
British Standards Institute. (2016). Guide to the ethical
design and application of robots and robotic systems,
BSI 8611.
British Standards Institute (2016). Hazard and Operability
Studies: Application Guide, BSI 61882.
Curral L., Forrester, R., Dawson, J., West, M. (2001). It’s
What You Do And The Way You Do It: Team Task,
Team Size and Innovation-related Group Processes. In
European Journal of Work and Organizational
Psychology, 10(2), pp. 187-204.
Foot, P. (1967). The problem of abortion and the doctrine
of double effect, Oxford Review 5, 5—16.
Hancock, P., Nourbakhsh, I., Steward, J. (2016). On the
future of transportation in an era of automated and
autonomous vehicles. In Proceedings of the National
Academy of Sciences, 116(16), pp 7684 – 7691.
Institute of Electrical and Electronic Engineers (2018).
Ethically Aligned Design, IEEE, v2,
https://standards.ieee.org/wpcontent/uploads/import/d
ocuments/other/ead_v2.pdf
IET, (2019). Code of Practice: Cyber Security and Safety,
Available at https://electrical.theiet.org/guidance-
codes-of-practice/publications-by-category/cyber-
security/code-of-practice-cyber-security-and-safety/
Kahneman, D., & Tversky, A. (1979). Prospect theory: An
analysis of decision under risk. Econometrica: Journal
of the Econometric Society, pp. 263-291.
Koay, K., Syrdal, D., Dautenhahn, K., Walters, M..(2020).
A narrative approach to human-robot interaction
prototyping for companion robots, in Paladyn, Journal
of Behavioural Robotics, 11, pp. 66 – 85.
Larson, K. (2020). Serious games and gamification in the
corporate training environment: A literature review.
TechTrends, 64(2), pp.319-328.
Leslie, D. (2019). Understanding artificial intelligence
ethics and safety: A guide for the responsible design
and implementation of AI systems in the public sector,
The Alan Turing Institute. https://doi.org/10.5281/
zenodo.3240529.
Lee, L., Lee, H. (2020). Tracing surveillance and auto-
regulation in Singapore: ‘smart’ responses to COVID-
19. In Media International Australia, 177(1), pp. 47-60.
Lin, P. (2015). Why Ethics Matters for Autonomous Cars.
In Autonomes Fahren, Springer Vieweg, pp 69 –85.
Malizia, A., Carta, S., Turchi, T., Crivellaro, C. (2022).
MiniCoDe Workshops: Minimise Algorithmic Bias in
Collaborative Decision Making with Design Fiction. In
Proceedings of the Hybrid Human Artificial
Intelligence Conference.
National Cyber Security Centre (2019). Intelligent Security
Tools, Available at https://www.ncsc.gov.uk/collection
/intelligentsecurity-tools
Park, J., Hong, E., Le, H. (2021). Adopting autonomous
vehicles: The moderating effects of demographic
variables. In Journal of Retailing and Consumer
Services, 63.
Rossi, F., Mattei, N. (2019).
Building ethically bounded AI.
In Proceedings of the AAAI Conference on Artificial
Intelligence, 33(1), pp. 9785-9789.
Saunders, J., Syrdal, D., Koay, K., Burke, N., Dautenhahn,
K. (2016). Teach Me - Show Me' - End-user
personalisation of a smart home and companion robot.
In IEEE Transactions on Human-Machine Systems,
46(1), pp. 27–40.
Schrier, K., (2019). Designing games for moral learning
and knowledge building. Games and Culture, 14(4),
pp.306-343.
Thornton, S. (2018). Autonomous vehicle motion planning
with ethical considerations, (Doctoral dissertation),
Stanford University.
Von Neumann, J. & Morgernstern, O. (1947). Theory of
Games and Economic Behaviour. Princeton University
Press.
CHIRA 2022 - 6th International Conference on Computer-Human Interaction Research and Applications
256
