
Exploiting AirSim as a Cross-dataset Benchmark for Safe UAV Landing
and Monocular Depth Estimation Models
Jon Ander I
˜
niguez De Gordoa
a
, Javier Barandiaran
b
and Marcos Nieto
c
Vicomtech Foundation, Basque Research and Technology Alliance (BRTA)
Mikeletegi 57, 20009 Donostia-San Sebasti
´
an, Spain
Keywords:
Monocular Depth Estimation, Safe Drone Landing, UAV, Synthetic Dataset, Simulation.
Abstract:
As there is a lack of publicly available datasets with depth and surface normal information from a drone’s
view, in this paper, we introduce the synthetic and photorealistic AirSimNC dataset. This dataset is used as
a benchmark to test the zero-shot cross-dataset performance of monocular depth and safe drone landing area
estimation models. We analysed state-of-the-art Deep Learning networks and trained them on the SafeUAV
dataset. While the depth models achieved very satisfactory results in the SafeUAV dataset, they showed a
scaling error in the AirSimNC benchmark. We also compared the performance of networks trained on the
KITTI and NYUv2 datasets, in order to test how training the networks on a bird’s eye view affects in the
performance on our benchmark. Regarding the safe landing estimation models, they surprisingly showed
barely any zero-shot cross-dataset penalty when it comes to the precision of horizontal surfaces.
1 INTRODUCTION
Autonomous drones must retrieve information from
their surroundings in order to ensure a safe flight and
landing. On the one hand, embedded safety mecha-
nisms based on ultrasound sensors are limited to short
range applications. On the other hand, long distance
safety mechanisms, such as LiDAR, are expensive
and too heavy for small UAVs to carry them on board.
Consequently, novel UAV models are trying to exploit
Deep Learning and Computer Vision techniques as an
alternative in order to get environment information.
While depth maps and surface normals can be es-
timated from RGB images using Deep Learning tech-
niques, most depth and surface normal datasets that
are publicly available have been directed towards au-
tonomous driving or indoor applications. However,
there is a lack of open-source and high resolution 3D
datasets from bird’s eye view. Generating a dataset
with such characteristics is challenging, not only be-
cause of the technical difficulty of retrieving data
from the viewpoint of a drone, but also due to the
safety laws and airspace regulations in each country.
Some approaches such as the SafeUAV dataset tried to
a
https://orcid.org/0000-0002-9008-5620
b
https://orcid.org/0000-0002-8135-0410
c
https://orcid.org/0000-0001-9879-0992
generate a Google Earth-based semi-synthetic depth
and landing area dataset (Marcu et al., 2019), but
the reconstructed images are quite coarse and some-
times distorted. Therefore, the is no public bench-
mark on which UAV-based Deep Learning models can
be properly compared.
The main contribution of this paper is the exploita-
tion of the AirSim simulator (Shah et al., 2017) by
generating the AirSimNC dataset, which is used as
a benchmark in order to compare the zero-shot cross
dataset performance of different monocular depth and
safe landing area estimation models from a drone
view. This dataset contains photorealistic images
from bird’s eye view at different heights, as well as
the ground truth depth map and information about
safe landing areas. The dataset is also diverse in ef-
fects such as motion blur or different weather con-
ditions. Regarding monocular depth estimation, we
analysed the state-of-the-art AdaBins (Bhat et al.,
2020) and DenseDepth (Alhashim and Wonka, 2018)
networks. We trained them on the SafeUAV dataset
and tested them on the AirSimNC benchmark. We
also tested the same networks trained on the big-
ger KITTI and NYUv2 datasets, in order to check
whether if training the networks on a bird’s eye view
dataset such as SafeUAV (even if is not as photo-
realistic as KITTI or NYUv2) leads to better re-
sults in the AirSimNC benchmark. Regarding the
454
Iñiguez De Gordoa, J., Barandiaran, J. and Nieto, M.
Exploiting AirSim as a Cross-dataset Benchmark for Safe UAV Landing and Monocular Depth Estimation Models.
DOI: 10.5220/0011562200003332
In Proceedings of the 14th International Joint Conference on Computational Intelligence (IJCCI 2022), pages 454-462
ISBN: 978-989-758-611-8; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

safe landing area estimation models, we analysed the
SafeUAV-Net-Large and Small semantic segmenta-
tion networks, also trained in SafeUAV and tested
them on the AirSimNC dataset.
The rest of this paper is organized as follows. Sec-
tion 2 presents the related work. Section 3 introduces
the six estimation models that were fully or partially
trained on the SafeUAV dataset in order to obtain ro-
bust models that are specialized in bird’s eye view
(Marcu et al., 2019). Section 4 presents the novel Air-
SimNC dataset, and the experimental results obtained
by the different estimation models. The depth esti-
mation models introduced in Section 3 are compared
to state-of-the-art monocular models in Section 4 too.
Section 5 summarizes the most relevant conclusions
of this paper.
2 RELATED WORK
2.1 Deep Learning-based Normal
Estimation
Normal estimation consists of inferring the local ori-
entation of the surfaces from RGB images. Deep
Learning-based approaches have achieved state-of-
the-art performance in surface normal predictions but
they are limited due to the shortage of large and real-
istic outdoor datasets with ground truth information.
Surface normal estimation is relevant to UAV applica-
tions as it can be used for safe landing area estimation.
While some approaches tried to estimate the sur-
face normals using depth map predictions (Yang et al.,
2018), it has been proved that estimating the surface
normals independently leads to a better normal pre-
diction performance (Zhan et al., 2019). Eigen et
al. (Eigen and Fergus, 2015) estimated the surface
normals using a multi-scale convolutional architec-
ture in order to estimate the normal vector for each
image pixel. Li et al. (Li et al., 2015) combined a
deep CNN with a post-proccessing refining step based
on Conditional Random Fields. Wang et al. (Wang
et al., 2015) developed architectures that integrated
local and global information from the input image, as
well as information used by classical normal estima-
tion methods. The GeoNet++ model, introduced by
Qi et al. (Qi et al., 2020), incorporates a two-stream
backbone neural network with an edge-aware refine-
ment module for precise boundary detailed outputs.
2.2 Deep Learning-based Monocular
Depth Estimation
Estimating the depth map from just one view is an
ill-posed problem because many 3D scenes can have
the same picture representation on the image plane.
However, monocular methods require a much cheaper
hardware, less computational complexity and no ex-
ternal calibrations or rectifications, at the expense of
less accurate results compared to stereo methods.
Many current monocular approaches share a sim-
ilar encoder-decoder architecture. The most popu-
lar encoders are EfficientNets (Bhat et al., 2020),
ResNets (Laina et al., 2016), or variants of ResNet
such as ResNext (Kim et al., 2020; Yin et al., 2019)
or DenseNet (Alhashim and Wonka, 2018; Lee et al.,
2019). For the decoder, Laina et al. (Laina et al.,
2016) proposes an up-scaling decoder architecture
based on up-convolution blocks, while Lee et al. (Lee
et al., 2019) uses Local Planar Guidance layers. Skip
connections are also popular in monocular depth ar-
chitectures, which are usually followed by an atten-
tion mechanism (Kim et al., 2020), or a dilated resid-
ual block (Yin et al., 2019). Aich et al. introduced
an architecture with bidirectional attention modules
(Aich et al., 2021). Moreover, Zhang et al. ex-
ploits temporal consistency among consecutive video
frames (Zhang et al., 2019).
2.3 Synthetic Datasets
Retrieving fully annotated ground truth from real
scenes can be very expensive and complicated, spe-
cially from bird’s eye view. Some existing datasets
such as Okutama-Action (Barekatain et al., 2017) or
VisDrone2018 (Zhu et al., 2018) are based on real
drone view footage but only contain object detection
ground truth (i.e. no depth maps or landing areas).
Moreover, the publicly available depth and normal
datasets either have sparse ground truth or employ
colorization methods. Synthetic datasets are an attrac-
tive alternative for dense and accurate ground truth
generation. There are different approaches for syn-
thetic dataset generation: from open-source 3D ani-
mated films (Butler et al., 2012; Mayer et al., 2016),
to vehicle simulators such as CARLA (Sekkat et al.,
2022) or AirSim. The AirSim simulator has already
been used in order to generate the VirtualCity3D (Liu
and Huang, 2021) and UrbanScene3D datasets (Lin
et al., 2022), which contain ground truth information
about bounding boxes, instance segmentation or 3D
pointclouds.
Exploiting AirSim as a Cross-dataset Benchmark for Safe UAV Landing and Monocular Depth Estimation Models
455

3 TRAINING on SafeUAV
DATASET
Due to the absence of comparable and publicly
available sets, we used the semi-synthetic SafeUAV
dataset to train all the networks analysed in this
paper. This dataset comprises RGB images from
3D-reconstructed urban and suburban areas retrieved
from Google Earth, their corresponding dense depth
maps and labelled images with the orientation of each
surface. Pixels are labelled as ’horizontal’, ’vertical’
or ’other’, and this task is referred to as HVO seg-
mentation. This labelling is an oversimplification of
the world, since not every horizontal surface is actu-
ally safe for drone landing (e.g. water or roads).
In order to generate monocular depth and HVO es-
timation models for UAV applications, different net-
works were trained on the SafeUAV dataset.
3.1 Studied Deep Learning-based
Architectures
The monocular depth estimation architectures ana-
lyzed in this work are AdaBins and DenseDepth. Ad-
aBins divides a given depth range into N adaptive
bins, and at the time of writing this paper, it presented
the best compromise among the evaluation metrics
in the KITTI Depth and NYUv2 benchmarks (Bhat
et al., 2020). On the other hand, DenseDepth shows
a strong compromise with its relatively low computa-
tional complexity and a marginal performance penalty
(Alhashim and Wonka, 2018).
The landing area estimation networks analyzed
in this paper were proposed in (Marcu et al., 2019).
SafeUAV-Net-Large (or Large model), is presented as
the model with the higher accuracy, while SafeUAV-
Net-Small (or the Small model) is presented as ther
faster and computationally less expensive model.
3.2 Implementation Details
We trained all of our networks on a single NVIDIA
Tesla V100-SXM2 GPU with 32 GB memory. To
avoid over-fitting, we used data augmentation tech-
niques. We used the Adam Optimizer (Kingma and
Ba, 2015), with 40 epochs, a learning rate of 0.0001,
patience of 3 and a batch size of 8.
AdaBins got the best results in the KITTI and
NYUv2 benchmarks when the number of bins was set
to 256. We trained the AdaBins network for 256 and
80 bins, generating the AdaBins-256 and AdaBins-80
models, respectively.
Since DenseDepth showed worse results than Ad-
aBins on the same benchmarks, we analyzed if its per-
formance could be enhanced by training it on mixed
datasets. We trained the DenseDepth network on the
SafeUAV dataset, and then in a super-dataset contain-
ing the SafeUAV and NYUv2 datasets. This way, we
generated two models: DD-UAV and DD-UAV-NYU.
Table 1 shows the size and inferring speed of the
models. The speed values should only be consid-
ered as a reference to compare the complexity of each
model. There are different tools that allow to reduce
the inferring time of networks that have not been used
on these models yet.
3.3 Experimental Results of Depth
Models
Table 2 shows the evaluation metrics of our depth es-
timation models on the SafeUAV dataset. Overall,
the AdaBins-256 models obtained better results than
AdaBins-80. DD-UAV-NYU got considerably better
error metrics than DD-UAV. In order to obtain a wider
visualization of the performance of our models, we
calculated two more parameters, as shown in Table
3: the structural similarity SSIM (Wang et al., 2004)
and the median relative value (Median Rel) between
the estimated and ground truth depth maps. The Me-
dian Rel indicates scaling errors in the estimations,
and it is more robust against outliers than other mean
error metrics. Table 3 shows that both DD-UAV and
DD-UAV-NYU have a slight scaling error (the esti-
mated depth values are 7.2% and 3.6% shorter than
the ground truth depth values, respectively).
3.4 Experimental Results of HVO
Models
Table 4 shows the classification evaluation metrics for
the Large and Small models. The row ’Horizontal’
shows the evaluation metrics when the classification
problem is reduced to a ’horizontal/non-horizontal’
binary classification model. The ’Other’ and ’Verti-
cal’ rows were calculated in a similar way. For safe
landing applications, the precision at predicting hori-
zontal surfaces stands out in importance. Rather than
being able to find all the horizontal areas from one
frame, it would be more useful to have a model where
all the predicted horizontal areas were actually hori-
zontal. In that sense, the higher the horizontal pre-
cision is, the safer it will be to use the model for
drone landing applications. In the SafeUAV dataset,
the Large model shows a higher horizontal precision
than the Small model.
ROBOVIS 2022 - Workshop on Robotics, Computer Vision and Intelligent Systems
456
Table 1: Number of parameters, size and inference time of each estimation model.
Model Number of parameters (M) Model size (MB) Tesla V100 (images/s)
AdaBins-80 78 M 917 9.623
AdaBins-256 78 M 918 9.583
DD-UAV 42.6 M 337 28.835
DD-UAV-NYU 42.6 M 337 28.835
SafeUAV-Net-Large 24 M 650 27.853
SafeUAV-Net-Small 1 M 24 101.366
Table 2: Quantitative performance of our depth models on SafeUAV. The RMS error is shown in meters. Best results are in
bold, while the second best results are underlined.
Model
Accuracy (higher is better) Error (lower is better)
δ
1
δ
2
δ
3
Abs Rel RMS log
10
AdaBins-80 0.952 0.987 0.992 0.084 6.425 0.033
AdaBins-256 0.972 0.993 0.996 0.065 5.587 0.026
DD-UAV 0.943 0.998 1 0.130 11.118 0.052
DD-UAV-NYU 0.973 0.996 0.999 0.068 8.451 0.030
Table 3: SSIM and Median Rel of our depth estimation
models on SafeUAV. Best results are in bold, second best
results are underlined.
Model SSIM Median Rel
AdaBins-80 0.331 0.004
AdaBins-256 0.318 -0.009
DD-UAV 0.583 0.072
DD-UAV-NYU 0.524 0.036
4 TESTS on AirSim SIMULATOR
Datasets tend to have strong built-in biases. There-
fore, rather than training and testing models on sub-
sets from the same datasets, a more faithful real-world
performance is obtained by evaluating the networks
on a completely different dataset from the one it was
trained on. This is known as the zero-shot cross-
dataset performance. In order to analyze the cross-
dataset performance of our trained models, we gen-
erated a synthetic dataset using the AirSim simula-
tor. AirSim is an open-source simulator for drones,
cars and other vehicles, and it creates accurate and
real-world environments by taking advantage of the
rendering, physics and perception computation of Un-
real Engine. By exploiting the photorealism of Unreal
Engine and the multiple scene settings that are repro-
ducible with AirSim, we generated a 3D photorealis-
tic dataset which is diverse in weather conditions and
camera effects such as motion blur or noise.
4.1 Synthetic AirSimNC Dataset
Generation
Our synthetic dataset, called AirSimNC, was created
using the suburban AirSimNH and urban CityEnviron
AirSim environments. The synthetic images were re-
trieved from random drone positions with fixed pitch
and roll angles of 45°and 0°, respectively, and a uni-
formly randomized elevation between 30 and 90 me-
ters. From each perspective, RGB, depth and nor-
mal information was retrieved. In order to generate
a semantic segmentation map that classifies the im-
age surfaces as horizontal, vertical or other, the nor-
mal maps were retrieved using the simulator. Then,
the normal vector was computed for each pixel in the
normal map. Afterwards, the angle between the hori-
zontal plane and the normal vector was calculated for
each pixel. Finally, each pixel was classified as hori-
zontal, vertical or sloped surface by applying empiri-
cally set thresholds into its corresponding angle.
4.2 Experimental Results of Depth
Models
We analyzed the performance of the four depth
estimation models introduced on Section 3. We
also evaluated the performance of the AdaBins and
DenseDepth networks when they are trained on the
KITTI and NYUv2 datasets.
The first half of Table 5 shows the evaluation
metrics of the models in the AirSimNC dataset (The
log
10
error could not be calculated for the DD-KITTI
and DD-NYU models because of undefined terms).
The estimations suffer from a strong scaling error,
as shown in the Median Rel values of Table 6 (in
Exploiting AirSim as a Cross-dataset Benchmark for Safe UAV Landing and Monocular Depth Estimation Models
457

Table 4: Classification metrics of the HVO models on SafeUAV. Row ’Average’ shows the average of the metrics in the three
classes. Row ’Reported’ shows the metrics claimed by (Marcu et al., 2019).
SafeUAV Accuracy Precision Recall IoU
Large model
Horizontal 0.827 0.756 0.725 0.587
Other 0.725 0.674 0.751 0.551
Vertical 0.852 0.678 0.559 0.442
Average 0.801 0.703 0.678 0.527
Reported 0.846 0.761 0.748 0.607
Small model
Horizontal 0.817 0.703 0.804 0.600
Other 0.733 0.715 0.675 0.532
Vertical 0.860 0.689 0.610 0.478
Average 0.804 0.702 0.696 0.537
Reported 0.823 0.728 0.693 0.551
Table 5: Quantitative performance of different depth models on the AirSimNC dataset. Best results in each category are in
bold, while the second best results are underlined. Rows with an asterisk represent the metrics for each model, once the
estimated depth maps were scaled to the ground truth median depth.
Model
Accuracy (higher is better) Error (lower is better)
δ
1
δ
2
δ
3
Abs Rel RMS log
10
AdaBins-80 0.388 0.623 0.804 0.608 42.592 0.191
AdaBins-256 0.249 0.504 0.724 0.930 51.104 0.233
AdaBins-256-KITTI 0.291 0.539 0.725 0.615 52.469 0.218
AdaBins-256-NYU 0.166 0.339 0.519 1.409 70.165 0.309
DD-UAV 0.240 0.396 0.507 0.530 107.630 0.383
DD-UAV-NYU 0.223 0.444 0.647 0.447 60.149 0.249
DD-KITTI 0.208 0.407 0.585 1.041 63.518 -
DD-NYU 0.091 0.190 0.302 3.114 76.365 -
* AdaBins-80 0.588 0.802 0.900 0.338 33.442 0.124
* AdaBins-256 0.567 0.801 0.899 0.393 33.893 0.128
* AdaBins-256-KITTI 0.435 0.745 0.848 0.387 42.254 0.156
* AdaBins-256-NYU 0.415 0.688 0.840 0.380 46.670 0.164
* DD-UAV 0.496 0.762 0.891 0.338 97.095 0.135
* DD-UAV-NYU 0.532 0.808 0.920 0.293 52.056 0.123
* DD-KITTI 0.239 0.459 0.649 0.958 61.548 -
* DD-NYU 0.258 0.492 0.681 0.837 21.257 -
our AdaBins-80-UAV model, for example, the esti-
mated depths are 27.3% higher than the ground truth
depths, while the depth maps estimated by our DD-
UAV models are 66.2% shorter than the real depth
maps).
In a real-world application, a model could be cal-
ibrated in a well-known environment in order to di-
minish the scaling error. To simulate such calibra-
tion, we multiplied each estimated depth map with a
scaling factor, so that the median of the scaled depth
map matches the median of the ground truth (which is
similar to the procedure explained in (Alhashim and
Wonka, 2018)). The second half of Table 5 shows
the evaluation metrics of the depth estimation mod-
els, once the scaling correction is performed.
Our four depth models achieved better scaled re-
ROBOVIS 2022 - Workshop on Robotics, Computer Vision and Intelligent Systems
458
Table 7: Evaluation metrics of the Large and Small models on the synthetic AirSimNC dataset.
AirSimNC Accuracy Precision Recall IoU
Large model
Horizontal 0.664 0.724 0.483 0.404
Other 0.567 0.252 0.625 0.215
Vertical 0.700 0.467 0.281 0.219
Average 0.640 0.481 0.463 0.279
Small model
Horizontal 0.634 0.738 0.366 0.324
Other 0.558 0.251 0.629 0.220
Vertical 0.673 0.379 0.273 0.197
Average 0.622 0.456 0.423 0.247
Table 6: SSIM and Median Rel metrics of depth models on
the AirSimNC dataset. Best results are in bold, second best
results are underlined.
Model SSIM Median Rel
AdaBins-80 0.099 -0.175
AdaBins-256 0.092 -0.564
AdaBins-256-KITTI 0.178 -0.125
AdaBins-256-NYU 0.057 -1.185
DD-UAV 0.121 0.524
DD-UAV-NYU 0.147 0.205
DD-KITTI 0.002 -0.044
DD-NYU -0.001 -1.880
sults than the other four models in almost every met-
ric, even if the later models were trained on much
larger and realistic datasets. The best evaluation met-
rics were obtained by the (scaled) DD-UAV-NYU
model in most parameters, followed by AdaBins-80.
This shows how monocular depth models can benefit
from mixing depth datasets during the training pro-
cess.
Figure 1 shows estimations of our depth models,
compared to the ground truth depth. The estimations
in AirSimNH (second column) suffer from outliers:
in high-frequency objects in the AdaBins models, and
in the upper part of the depth maps in the DenseDepth
estimations.
4.3 Experimental Results of HVO
Models
Table 7 shows the evaluation metrics for the HVO
models on the AirSimNC dataset. For both models,
the precision for horizontal surfaces is higher than
72%, with barely no cross-dataset penalty. (the Small
model shows a slightly higher precision). Out of the
estimated ’horizontal’ pixels that were incorrectly la-
belled, most belonged to the ’other’ class.
Figure 2 shows a visual comparison of the HVO
estimation models. The number of ’other’ pixels is
higher in the estimations than in the ground truth (the
HVO models have learned to ’play it safe’ around un-
certain or borderline surfaces). The Large model pro-
vides more detailed estimations (the edges of surfaces
and objects are more discernible in the Large estima-
tions), while the estimations of the Small models are
more vague overall.
5 CONCLUSION
This paper introduced the synthetic and photoreal-
istic AirSimNC dataset, which was employed as a
benchmark to compare the cross-dataset performance
of depth and HVO estimation models. Regarding
the depth estimation models, the ones trained on
SafeUAV beat other state-of-the-art models in our
benchmark. However, we also checked that mix-
ing a semi-synthetic dataset with bird’s eye view
(SafeUAV) and a real dataset with more realistic im-
ages (NYUv2) leads to a great improvement in the
performance of the DenseDepth network. Overall,
the models trained of bird’s eye view obtained decent
results in our benchmark, up to a scaling error. Re-
garding the safe landing area estimation models, they
showed barely any cross-dataset penalty at the preci-
sion of horizontal surfaces.
During this paper, we have regarded depth and
landing area estimation as independent tasks. The ge-
ometric relationship between depth and surface nor-
Exploiting AirSim as a Cross-dataset Benchmark for Safe UAV Landing and Monocular Depth Estimation Models
459
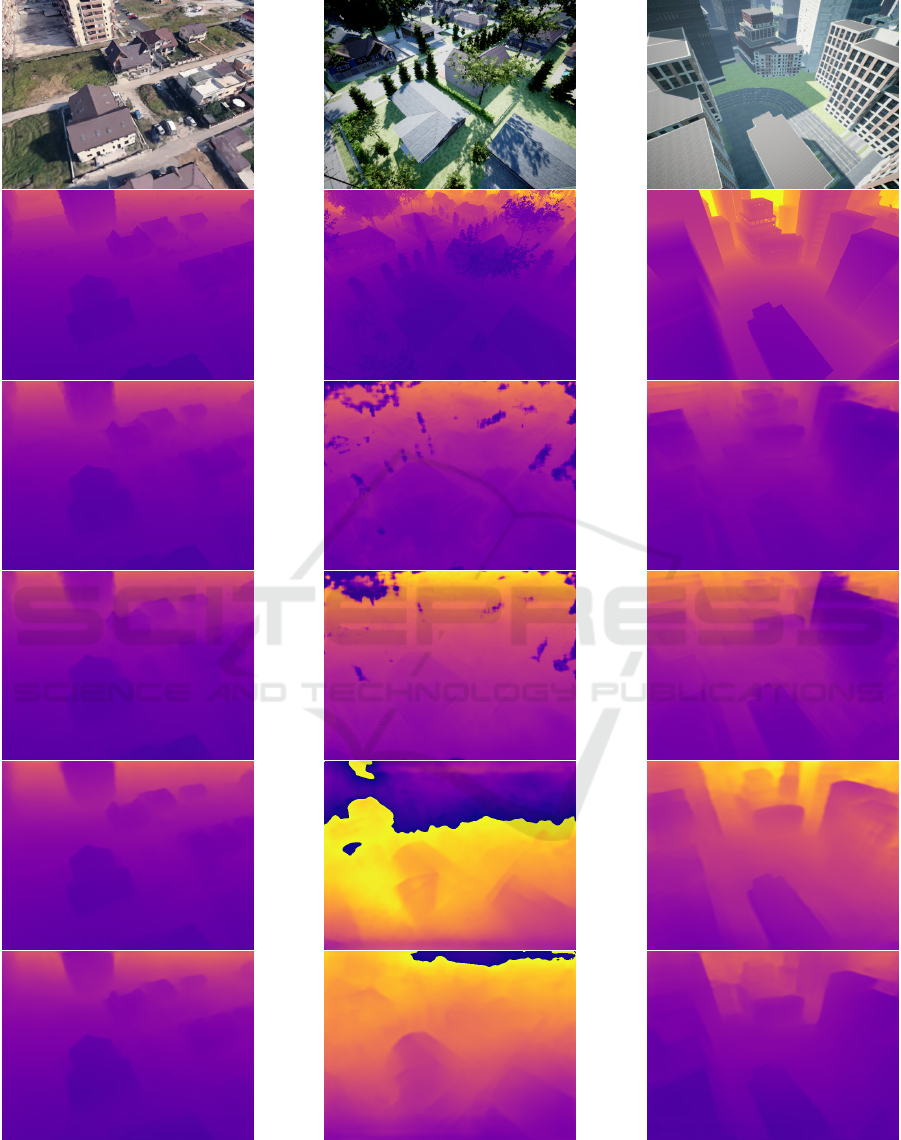
Figure 1: Qualitative comparison of our depth estimation models. First row: RGB images from SafeUAV, AirSimNH and
CityEnviron, respectively. Second row: ground truth depth maps. Rows 3 to 6: estimations by the AdaBins-80, AdaBins-256,
DD-UAV and DD-UAV-NYU.
ROBOVIS 2022 - Workshop on Robotics, Computer Vision and Intelligent Systems
460

Figure 2: Qualitative comparison of the HVO estimation models. First row: RGB images from SafeUAV, AirSimNH and
CityEnviron, respectively. Second row: ground truth HVO labels. Rows 3 to 4: Large and Small model predictions.
mals could be exploited so that a single model per-
forms both estimation tasks simultaneously. The de-
velopment of such network is left as future work.
ACKNOWLEDGEMENTS
This work has received funding from Basque Gov-
ernment under project CODISAVA of the program
ELKARTEK (ETORTEK)-2020.
REFERENCES
Aich, S., Uwabeza Vianney, J. M., Amirul Islam, M., and
Bingbing Liu, M. K. (2021). Bidirectional attention
network for monocular depth estimation. In 2021
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 11746–11752.
Alhashim, I. and Wonka, P. (2018). High quality monocular
depth estimation via transfer learning. arXiv e-prints,
abs/1812.11941.
Barekatain, M., Marti, M., Shih, H., Murray, S., Nakayama,
K., Matsuo, Y., and Prendinger, H. (2017). Okutama-
action: An aerial view video dataset for concurrent
human action detection. In 2017 IEEE Conference
on Computer Vision and Pattern Recognition Work-
shops (CVPRW), pages 2153–2160, Los Alamitos,
CA, USA. IEEE Computer Society.
Bhat, S. F., Alhashim, I., and Wonka, P. (2020). Adabins:
Depth estimation using adaptive bins. arXiv, pages
1–13.
Butler, D. J., Wulff, J., Stanley, G. B., and Black, M. J.
(2012). A naturalistic open source movie for optical
flow evaluation. Lecture Notes in Computer Science
(including subseries Lecture Notes in Artificial Intel-
Exploiting AirSim as a Cross-dataset Benchmark for Safe UAV Landing and Monocular Depth Estimation Models
461

ligence and Lecture Notes in Bioinformatics), 7577
LNCS(PART 6):611–625.
Eigen, D. and Fergus, R. (2015). Predicting depth, surface
normals and semantic labels with a common multi-
scale convolutional architecture. Proceedings of the
IEEE International Conference on Computer Vision,
2015 Inter:2650–2658.
Kim, D., Lee, S., Lee, J., and Kim, J. (2020). Leveraging
Contextual Information for Monocular Depth Estima-
tion. IEEE Access, 8:147808–147817.
Kingma, D. P. and Ba, J. L. (2015). Adam: A method for
stochastic optimization. 3rd International Conference
on Learning Representations, ICLR 2015 - Confer-
ence Track Proceedings, pages 1–15.
Laina, I., Rupprecht, C., Belagiannis, V., Tombari, F., and
Navab, N. (2016). Deeper depth prediction with fully
convolutional residual networks. Proceedings - 2016
4th International Conference on 3D Vision, 3DV 2016,
pages 239–248.
Lee, J. H., Han, M.-K., Ko, D. W., and Suh, I. H. (2019).
From big to small: Multi-scale local planar guid-
ance for monocular depth estimation. arXiv preprint
arXiv:1907.10326.
Li, B., Shen, C., Dai, Y., van den Hengel, A., and He, M.
(2015). Depth and surface normal estimation from
monocular images using regression on deep features
and hierarchical crfs. In 2015 IEEE Conference on
Computer Vision and Pattern Recognition (CVPR),
pages 1119–1127.
Lin, L., Liu, Y., Hu, Y., Yan, X., Xie, K., and Huang, H.
(2022). Capturing, reconstructing, and simulating: the
urbanscene3d dataset. In ECCV.
Liu, Y. and Huang, H. (2021). Virtualcity3d: A large scale
urban scene dataset and simulator.
Marcu, A., Costea, D., Lic
˘
aret¸, V., P
ˆ
ırvu, M., Slus¸anschi,
E., and Leordeanu, M. (2019). SafeUAV: learning to
estimate depth and safe landing areas for UAVs from
synthetic data. Lecture Notes in Computer Science
(including subseries Lecture Notes in Artificial Intel-
ligence and Lecture Notes in Bioinformatics), 11130
LNCS:43–58.
Mayer, N., Ilg, E., Hausser, P., Fischer, P., Cremers, D.,
Dosovitskiy, A., and Brox, T. (2016). A Large Dataset
to Train Convolutional Networks for Disparity, Opti-
cal Flow, and Scene Flow Estimation. Proceedings of
the IEEE Computer Society Conference on Computer
Vision and Pattern Recognition, 2016-Decem:4040–
4048.
Qi, X., Liu, Z., Liao, R., Torr, P. H., Urtasun, R., and Jia, J.
(2020). GeoNet++: Iterative Geometric Neural Net-
work with Edge-Aware Refinement for Joint Depth
and Surface Normal Estimation. IEEE Transactions
on Pattern Analysis and Machine Intelligence, pages
1–1.
Sekkat, A. R., Dupuis, Y., Kumar, V. R., Rashed, H., Yo-
gamani, S., Vasseur, P., and Honeine, P. (2022). Syn-
woodscape: Synthetic surround-view fisheye camera
dataset for autonomous driving. IEEE Robotics and
Automation Letters, 7(3):8502–8509.
Shah, S., Dey, D., Lovett, C., and Kapoor, A. (2017). Air-
sim: High-fidelity visual and physical simulation for
autonomous vehicles. In Field and Service Robotics.
Wang, X., Fouhey, D. F., and Gupta, A. (2015). Designing
deep networks for surface normal estimation. Pro-
ceedings of the IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, 07-12-
June(Figure 2):539–547.
Wang, Z., Bovik, A. C., Sheikh, H. R., and Simoncelli, E. P.
(2004). Image quality assessment: From error visi-
bility to structural similarity. IEEE Transactions on
Image Processing, 13(4):600–612.
Yang, Z., Wang, P., Xu, W., Zhao, L., and Neva-
tia, R. (2018). Unsupervised learning of geometry
from videos with edge-aware depth-normal consis-
tency. 32nd AAAI Conference on Artificial Intelli-
gence, AAAI 2018, 1(c):7493–7500.
Yin, W., Liu, Y., Shen, C., and Yan, Y. (2019). Enforcing
geometric constraints of virtual normal for depth pre-
diction. Proceedings of the IEEE International Con-
ference on Computer Vision, 2019-Octob:5683–5692.
Zhan, H., Weerasekera, C. S., Garg, R., and Reid, I. (2019).
Self-supervised learning for single view depth and
surface normal estimation. Proceedings - IEEE In-
ternational Conference on Robotics and Automation,
2019-May:4811–4817.
Zhang, H., Shen, C., Li, Y., Cao, Y., Liu, Y., and Yan,
Y. (2019). Exploiting temporal consistency for real-
time video depth estimation. Proceedings of the IEEE
International Conference on Computer Vision, 2019-
Octob:1725–1734.
Zhu, P., Wen, L., Bian, X., Ling, H., and Hu, Q. (2018).
Vision Meets Drones: A Challenge. pages 1–11.
ROBOVIS 2022 - Workshop on Robotics, Computer Vision and Intelligent Systems
462
