
ECD Test: An Empirical Way based on the Cumulative Distributions to
Evaluate the Number of Clusters for Unsupervised Clustering
Dylan Molini
´
e
a
and Kurosh Madani
LISSI Laboratory EA 3956, Universit
´
e Paris-Est Cr
´
eteil, S
´
enart-FB Institute of Technology,
Campus de S
´
enart, 36-37 Rue Georges Charpak, F-77567 Lieusaint, France
Keywords:
Unsupervised Clustering, Parameter Estimation, Cumulative Distributions, Industry 4.0, Cognitive Systems.
Abstract:
Unsupervised clustering consists in blindly gathering unknown data into compact and homogeneous groups; it
is one of the very first steps of any Machine Learning approach, whether it is about Data Mining, Knowledge
Extraction, Anomaly Detection or System Modeling. Unfortunately, unsupervised clustering suffers from the
major drawback of requiring manual parameters to perform accurately; one of them is the expected number
of clusters. This parameter often determines whether the clusters will relevantly represent the system or not.
From literature, there is no universal fashion to estimate this value; in this paper, we address this problem
through a novel approach. To do so, we rely on a unique, blind clustering, then we characterize the so-
built clusters by their Empirical Cumulative Distributions that we compare to one another using the Modified
Hausdorff Distance, and we finally regroup the clusters by Region Growing, driven by these characteristics.
This allows to rebuild the feature space’s regions: the number of expected clusters is the number of regions
found. We apply this methodology to both academic and real industrial data, and show that it provides very
good estimates of the number of clusters, no matter the dataset’s complexity nor the clustering method used.
1 INTRODUCTION
In the area of Machine Learning, clustering is a ma-
jor cornerstone: it is often used to preprocess data,
or to highlight hidden information. Maybe one of the
most interesting applications of clustering is the auto-
matic labeling of data, which allows the use of super-
vised (learning) methods downstream – the automatic
labeling performed by unsupervised clustering aims
to replace a manual labeling (Molini
´
e et al., 2021).
Although promising, clustering has some limits.
The first is the accuracy of the results: since we deal
with blind methods, it is very hard to state on the ac-
curacy – and on the relevance alike – of the obtained
clusters. To handle that, we proposed BSOM, a two-
level clustering method based on the averaging of sev-
eral clusterings, so as to diminish the scattering of
the results whilst maximizing the number of scenar-
ios taken into account (Molini
´
e and Madani, 2022).
The second limitation of clustering is related to
the meta-parameters. Actually, alike most unsuper-
vised approaches, some parameters must be set man-
ually, which greatly impacts the results, especially
in a blind, unsupervised context. As a consequence,
a
https://orcid.org/0000-0002-6499-3959
the parameters should be chosen very wisely; but the
question remains quite simple: how to do so?
Indeed, the true reason for using unsupervised
learning is that one needs no previous information on
the data; ironically, the meta-parameters are the para-
dox of unsupervised learning, for they require some
specific knowledge to be set correctly. Even though
every method has its own meta-parameters, there is
one required by most of them: the (expected) number
of clusters; for instance, it is the K of the K-Means,
or the grid’s size of the Self-Organizing Maps. This
parameter is incontestably the most sensitive one, for
it may change the results in depth. Note that some
methods do not need this parameter, such as hierarchi-
cal approaches (e.g., Ascending Hierarchical Classifi-
cation, Tree-like Divide To Simplify); however, they
suffer from another drawback with their thresholds
and split criteria (when to isolate data from others).
As a consequence, finding a way to estimate the
optimal value to set the meta-parameters to – and es-
pecially the number of clusters – becomes crucial,
even though there exists no such tool. A piece of so-
lution may come along an upstream analysis of the
database before processing; for instance, one may
study the relation between data in order to see if any
Molinié, D. and Madani, K.
ECD Test: An Empirical Way based on the Cumulative Distributions to Evaluate the Number of Clusters for Unsupervised Clustering.
DOI: 10.5220/0011562500003329
In Proceedings of the 3rd International Conference on Innovative Intelligent Industrial Production and Logistics (IN4PL 2022), pages 279-290
ISBN: 978-989-758-612-5; ISSN: 2184-9285
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
279

redundancies appear, which could drive the choice of
the number of clusters. Unfortunately, attempting to
find a universal characteristic suitable to any database
is just a waste of effort (Molini
´
e et al., 2022).
In this paper, we address that actual problem,
through an empirical fashion. Indeed, whilst it is very
hard to find a universal criterion to any database, noth-
ing prevents from applying a first, raw clustering, at a
fine grain for instance, and then refine it further, and
eventually use the refined version of the clustering as
an indicator of a good candidate for the number of
clusters. Note that refining a database such way and
proceeding to a clustering with a good value for the
number of clusters are two different things, since re-
doing a clustering with the correct meta-parameters
takes benefit from the intrinsic ability of the clustering
method for data organization, i.e., the learning step,
which is lost when only refining the clusters.
First, we will begin with a short overview of some
already-existing methods to evaluate the number of
clusters, and we will move on to the detailed descrip-
tion of the proposed method. Then, we will assess
this technique with both academic and real industrial
data, and we will eventually conclude this paper.
2 STATE-OF-THE-ART
There exists two ways of evaluating the optimal pa-
rameters of an algorithm: 1- By a deep upstream anal-
ysis, based on heavy mathematical tools; 2- Through
an empirical approach based on the example. The for-
mer has the advantage of leading to more accurate re-
sults (mathematically ”optimal”), but has the major
drawback of being very heavy to perform, and lowly
generalizable (which tool to use?); on the contrary,
the latter has the advantage of being easier and more
universal, but has the limitation of achieving less ac-
curate results (empirically adapted, but not optimal)
1
.
Unfortunately, thus far, no mathematically opti-
mal solution has been proposed to the problem of de-
termining the number of clusters of a dataset; one gen-
erally has to content oneself with heuristics, i.e., ac-
ceptable estimates with respect to the observed data.
These heuristics can be gathered into two groups:
1- The theoretical ones, which apply some tools to the
database so as to estimate the empirically ”optimal”
number of clusters; 2- The true empirical ones, which
simply cluster the database several times by varying
1
This limitation is not a real one in Physics and Ma-
chine Learning, for an optimized solution is generally well-
suited for models, but often not applicable to real situations.
Moreover, an experimental dataset can differ from a record
to another, thus the optimal solution may vary between both.
the value of the number of clusters, and eventually
select the clustering (and thus the number of clusters)
which minimizes any criterion. Most of the methods
of the literature belong to the second category.
From the rare methods of the first category, it is
worth mentioning (Honarkhah and Caers, 2010). The
authors assumed that any dataset can be linearly clus-
tered in an appropriate space, called kernel space
2
; to
do so, one must have recourse to a dedicated transition
matrix, called kernel matrix, which projects the data
from the original space to the kernel space. The au-
thors suggested that this matrix would contain much
information, and especially that plotting its eigenval-
ues, sorted and weighted by the normalized dot prod-
uct of their eigenvectors, would lead to a good esti-
mate of the number of clusters as of the curve’s knee.
They got good results on simple examples, but this
method suffers from two major drawbacks: firstly,
the projection into the kernel space is a complex and
time-consuming operation; secondly, the kernel to use
must be defined manually upstream, which requires
some kind of knowledge (such as the possible data’s
distribution), and thus we are replacing a knowledge
(the number of clusters) by another (the kernel).
Otherwise, some methods rely on the Akaike or
the Bayesian Information Criteria (AIC and BIC, re-
spectively (Goutte et al., 2001; Pelleg and Moore,
2002). Based on a pure statistical estimation of the
information contained within a dataset, these criteria
can be used in some fashion so as to provide an esti-
mate of the number of clusters. Nonetheless they are
generally used as simple indicators of clustering qual-
ity in an empirical fashion by running the clustering
several times, incrementing each time the number of
clusters, and by eventually selecting the value maxi-
mizing these information criteria.
On the opposite, the second category’s methods
operate much simpler: they cluster the data with dif-
ferent values for the number of clusters, compute
some quality criteria, and eventually select that with
the best results. Notice that even though these tech-
niques claim that they are able to find a good candi-
date for the number of clusters, they are actually not
sensu stricto; indeed, they actually think and operate
the other way round: the interest in finding a good
candidate for the number of clusters is precisely to
obtain a good clustering, but there is no need for this
parameter if one already has the best results just by
chance or by brute force. These methods are more an
empirical way to find the best clustered version of a
database rather than a true way to estimate the optimal
number of clusters.
2
For instance, two circles can be linearly separated if
the space is circular, since a line in this space is a true circle.
ETCIIM 2022 - International Workshop on Emerging Trends and Case-Studies in Industry 4.0 and Intelligent Manufacturing
280

That being said, they propose some variations, and
especially a quantification of the information brought
by the addition of new clusters; indeed, very likely
when adding new clusters, they should be more com-
pact, and thus should carry more information, but
there is often a point from which adding new clusters
is not really useful. For instance, consider a database
with 5 classes: clustering it with 5 clusters should be
the best option, but using 10 clusters will probably
lead to more compact groups, thus the quality of that
last clustering will be better. Most techniques from
the literature aim to address that problem of informa-
tion, by proposing an empirical trade-off: which value
to use to get the most information, while also not de-
grading the clustering relevance too much?
This is for instance the Elbow method’s purpose
(Marutho et al., 2018): it plots the explained vari-
ance against the number of clusters, and selects as
best candidate (trade-off) for the number of clusters
the curve’s knee (also called elbow). Simple method,
it can provide a correct estimate, but there is no certi-
tude that such inflection point actually exists.
Similarly, instead of using the explained variance,
(Amorim and Hennig, 2015) proposed to use the Sil-
houette Coefficients, a compactness quantifier pop-
ular in clustering (Rousseeuw, 1987), while keeping
the same methodology, i.e., plotting the mean Silhou-
ettes against the number of clusters, and eventually
return the curve’s knee. These coefficients are highly
representative of the quality of the clustering (Molini
´
e
et al., 2022), but are very long to compute: the method
is slightly more representative, but longer to perform.
A last work to mention may be (Tibshirani et al.,
2001), which processes the same way than the two
previous methods, but this time replacing the metrics
by the explained variation, i.e., the part of the ob-
served variance in the theoretical variance of a model.
To do so, the idea is to build a ”ground truth” model
under the null hypothesis, i.e., with the same charac-
teristics (particularly the mean and variance) than the
database, cluster it several times and finally compare
how close to the clustering performed over the real
data it is. This procedure is repeated with several val-
ues set for the number of clusters, and that obtaining
the less dissimilarity between the clustered ”ground
truth” and the real clustered database is chosen as the
best candidate. This method led to quite good results,
but requires a model to build the ground truth upon
and is incredibly complex for such a simple purpose.
As a summary, there are two ways to estimate the
number of clusters: by a theoretical analysis or by
testing several values and selecting that minimizing
any criterion. In this paper, we propose a third kind
of methodology, halfway between both.
3 PROPOSED SOLUTION
The main problem with fully theoretical approaches is
that they are generally very complex, often too com-
plex for the user’s real purposes. Indeed, it is not rare
that a mathematically optimal solution to a physical
problem is not applicable as it is to real situations, due
to the intrinsic imperfections of the real system. An
optimal solution suits well simulations, but an only
approximated solution is often more than enough for
real systems. Of course, that is not always true, such
as in aviation or with critical systems for instance,
where an exact solution is absolutely necessary; but
where unsupervised learning can be used, such accu-
racy is generally not mandatory, whence the use of
empirical approaches can be justified.
Moreover, empirical methods have another great
advantage over theoretical ones: they perfectly suit
the observed data in a given context; they actually are
more practical and data oriented.
For these reasons, we have favored an empirical
approach for the estimation of the number of clusters
contained within a database. Nonetheless, we did not
want to propose another clustering method, which is
somehow what the Elbow method and assimilated do
in testing several clusterings and eventually selecting
that minimizing any criterion. As a consequence, we
thought about a different methodology which would
provide a true empirical value for the number of clus-
ters but without unnecessarily testing many.
In short, our methodology can be summarized as
follows: 1- Cluster the database only once, but with a
large number of clusters; 2- Characterize the clusters
in some fashion; 3- Regroup the clusters according
to the closeness of their characteristics computed in
the previous point; 4- Return the estimated number of
clusters as of the number of so-built ”super-groups”.
Remark that this is not a new clustering, but actu-
ally a true estimation of the number of clusters. So as
to get a true clustering method, we could have merged
repeatedly the clusters in a hierarchical fashion, but
that already exists and is entitled agglomerative clus-
tering (Sibson, 1973; Defays, 1977). Getting a good
estimate for the number of clusters aims to put every-
thing in place for the true Machine Learning cluster-
ing step thereafter. Indeed, the learning step would
be lost in the clusters merging, whilst setting the op-
timal parameters to the clustering method would take
advantage of all its abilities.
In all the following, we will refer to the real num-
ber of clusters as K, the estimated number as K
′
, the
database as D = {x
n
}
n∈[[1,N]]
with N = |D| the number
of data within, the clustering C = {C
k
}
k∈[[1,K]]
with C
k
the cluster k, and denote d as a distance.
ECD Test: An Empirical Way based on the Cumulative Distributions to Evaluate the Number of Clusters for Unsupervised Clustering
281

3.1 Clustering
In our methodology, the very first step is clustering:
it consists in gathering data into compact and homo-
geneous groups, within which they share similarities,
while differing from a group to another. In practice,
most unsupervised clustering methods aim to mini-
mize the statistical ”error” between the clusters and
data. As an example, by considering that the distance
between a data and the barycenter of its correspond-
ing cluster is such an error, the total error of the clus-
tering is the sum of these local distances, for all the
data, for all the clusters: clustering aims to reduce this
sum. Actually, it is mostly a matter of optimization,
but hidden behind a dedicated formalism.
There exists plenty of clustering methods, either
supervised (SVM, Random Forests) or totally blind
(K-Means, SOMs). The choice of the method to use
depends on the context and on the objectives.
Supervised clustering consists in searching for
the best borders between different, already-labeled
classes, by adapting a shape (line, curve) to the space
between them; note that, here, the classes are known,
whence the use of ”class” instead of ”cluster”. Un-
supervised clustering consists in blindly regrouping
data into compact groups, with no previous assump-
tion on them; neither the barycenters of the classes,
nor even their number are known, whence the term
unsupervised. The former achieves better results,
but assumes much information on the data (their true
classes), whereas the latter is more universal, but the
quality and relevance of its output is not certain.
In an Industry 4.0 context, we study the relevance
of using Data Mining methods to dig into data, and
extract whatever knowledge can be found. As such,
we mainly rely on unsupervised learning, for we aim
to investigate highly generalizable works. For these
reasons, we will only present unsupervised clustering.
The first to be introduced is the K-Means, the
reference clustering method (Lloyd, 1982): it draws
K points as barycenters, aggregates the surrounding
data around these points according to their respec-
tive closeness, and then updates the barycenters as
the true means of the so-built groups; this operation
is repeated a certain number of times or until satisfy-
ing any criterion. The K-Means is a very-well known
clustering algorithm, but also very naive and simple:
it has the major limitation of being able to separate
only linearly separable datasets, and therefore poorly
suitable for real situations such as industrial systems.
To compensate that, one may operate in a kernel
space, where the data would be ”linearly” separable,
provided that a line in such space is a nonlinear curve
in the original space. Once the data projected into this
nonlinear space, one may apply the K-Means to them;
this method is called Kernel K-Means (Dhillon et al.,
2004). Notice that this kernel version also exists for
many methods (Kernel SOM, SVM, etc.).
Better than the K-Means and more adapted to non-
linearly separable datasets, one may also consider
the Self-Organizing Maps (SOMs) (Kohonen, 1982);
they can be seen as a generalization of the K-Means
in which the learning step is nonlinear, and where the
different clusters are connected to each other within a
map, called a grid. This linkage aims to maintain the
topology of the database, while also accelerating the
learning by using a notion of neighborhood.
In (Molini
´
e et al., 2021), we tested the K-Means,
Kernel K-Means and SOMs on real industrial data,
and concluded that the last method is that which
works best, by providing the most representative clus-
ters, i.e., the closest to the real system’s behaviors.
In (Molini
´
e and Madani, 2022), we proposed an
improvement to the SOMs as of the Bi-Level Self-
Organizing Maps (BSOMs), a two-level clustering
aiming to reduce the scattering of the results, while
also improving their accuracy and relevance. In-
deed, alike any unsupervised method, the initializa-
tion should be random so as to avoid bias; but do-
ing so may scatter the results: there is no certitude
that two runs of the same algorithm give the same re-
sults. To compensate that, we proposed to build sev-
eral maps, with different initializations and learnings
(first level), and eventually project all of them into a
final map using the SOMs (second level), giving birth
to what we called BSOM. We tested it on real indus-
trial data anew, and, compared to the K-Means and to
the original SOMs, BSOM proved to be more accu-
rate, less volatile (more consistent results between the
runs) and closer to the real objective clusters, i.e., the
real behaviors of the industrial system we considered.
In this paper, we will use the K-Means, the SOMs
and BSOM to assess our methodology of determin-
ing the best candidate for the number of clusters, i.e.,
K for the first, and the grid’s size for the two others.
Figure 1 gives an example of results for each method,
applied to a handful of Gaussian distributions; even
though it is pretty subjective, BSOM seems to give
the best clustering, with the most consistent regional
groups, then SOM and finally the K-Means.
3.2 Cumulative Distributions
Once the clusters built, they must be characterized;
this can be done in many fashions: feature vector,
compactness, homogeneity, etc. Some of these in-
dicators aim to measure the quality of the clusters,
i.e., how similar the data within are, and/or how far
ETCIIM 2022 - International Workshop on Emerging Trends and Case-Studies in Industry 4.0 and Intelligent Manufacturing
282

Figure 1: Example of clustering with different methods.
from the other clusters they are; this is for instance the
case with the Silhouette Coefficients. On the contrary,
some of these quantifiers aim to describe the clusters,
i.e., propose a characteristic unique to them and al-
lowing to find them back or compare them between
each other: this is for example the case with descrip-
tor vectors, which are commonly used in computer
vision so as to simplify the comparison of images, or
to search for the same object in different images.
In order to evaluate the quality of the clustering,
the first category of methods is the most appropriate;
on the opposite, if the purpose is to compare the clus-
ters with each other, the second category of methods
should be considered first. In our case, since we want
to estimate how similar the clusters are, so as to link
them in some fashion, the second category of methods
is the most appropriate for us.
Consequently, we are looking for a characteristic
unique to every cluster, which would indicate that two
clusters are very close (or distant) in the feature space,
but without necessarily taking account their inner
quality. To that purpose, the Average Standard Devia-
tion (Rybnik, 2004), the Hyper-Density (Molini
´
e and
Madani, 2021) or the Silhouettes (Rousseeuw, 1987)
would be of little help; in fact, we need more a char-
acteristic than a true compactness measure.
There exists thousands of tools to characterize (or
just compare) groups of data: mathematical moments
(mean, variance, etc.), intercluster distances, linkages
(single, complete, Ward, etc.), correlation, etc. Each
one of them has its own advantages and drawbacks:
for instance, correlation is only able to detect linear
similarity between groups of data; a linkage does not
necessarily take into account the outliers; and a statis-
tical moment can be routed by the physical proximity
of the clusters in the feature space.
As such, inspired by the Kolmogorov-Smirnov
(KS) Test (Simard and L’Ecuyer, 2011; Hassani and
Silva, 2015), we propose to use the Empirical Cumu-
lative Distributions (ECDs) of the clusters. Indeed,
they are highly representative of the clusters: they in-
dicate how the data within are distributed, with the
great advantage of considering the data’s intrinsic val-
ues, contrary to most of the metrics discussed earlier.
The ECD of a cluster represents the empirical
probability that its data are lower than a threshold; for
cluster C
k
, this probability P
k
is given by formula (1).
∀x ∈ R, P
k
(x) =
1
|C
k
|
∑
x
n
∈C
k
1
x
n
≤x
(1)
with 1
x
n
≤x
the indicator function of {x
n
∈ R | x
n
≤ x},
and defined by (2).
∀x
n
,x ∈ R, 1
x
n
≤x
=
(
1, if x
n
≤ x
0, else
(2)
Notice that one may derive function 1
x
n
≤x
from
the (delayed) Heaviside step function H, as of (3).
∀x
n
,x ∈ R, 1
x
n
≤x
= 1 − H(x
n
− x) (3)
Finally, the ECD of cluster C
k
is defined as the set
of all the empirical probabilities, as of (4).
ECD
k
=
P
k
(x)
x∈R
(4)
Notice that the ECD should not be computed for
any real value, but only for that belonging to the do-
main of the database; in practice, this set is computed
for a finite number of x, ranging from the database’s
minimum to its maximum with a given step.
The ECDs are very useful to understand how the
data are distributed within a cluster. Moreover, since
they are based on absolute values, they also have a
physical meaning, related to achieved values; indeed,
if two datasets have close ECDs, it means that their
data distributions are close alike, both in compact-
ness and in absolute values. To keep it simple, the
slope of an ECD indicates the compactness (the larger
the slope, the more compact the data), whilst its posi-
tion indicates the position of the data within the space.
That last point is the core of our methodology, and the
main reason why we chose the ECDs over any other
metric: by comparing two of them, it is possible to de-
cide if two clusters are similar (density, compactness),
but also if they are just close in the space.
Notice that there is one ECD by dimension, which
must be fused in some fashion so as to provide a scalar
as of the number of clusters. One may think about tak-
ing their average, computed over all the dimensions,
but this could create false correspondence. For in-
stance, assuming x and y belong to the same interval I,
the function f
1
(x,y) = x and the function f
2
(x,y) = y
are very different, but have the same mean over the
two dimensions. This is a good example of the limit
of averaging; to avoid such case, we propose to state
that two distributions are very close if that is true for
all the dimensions at the same time.
As an example, Figure 2 depicts the ECDs of both
dimensions of the clusters given by BSOM (rightmost
ECD Test: An Empirical Way based on the Cumulative Distributions to Evaluate the Number of Clusters for Unsupervised Clustering
283
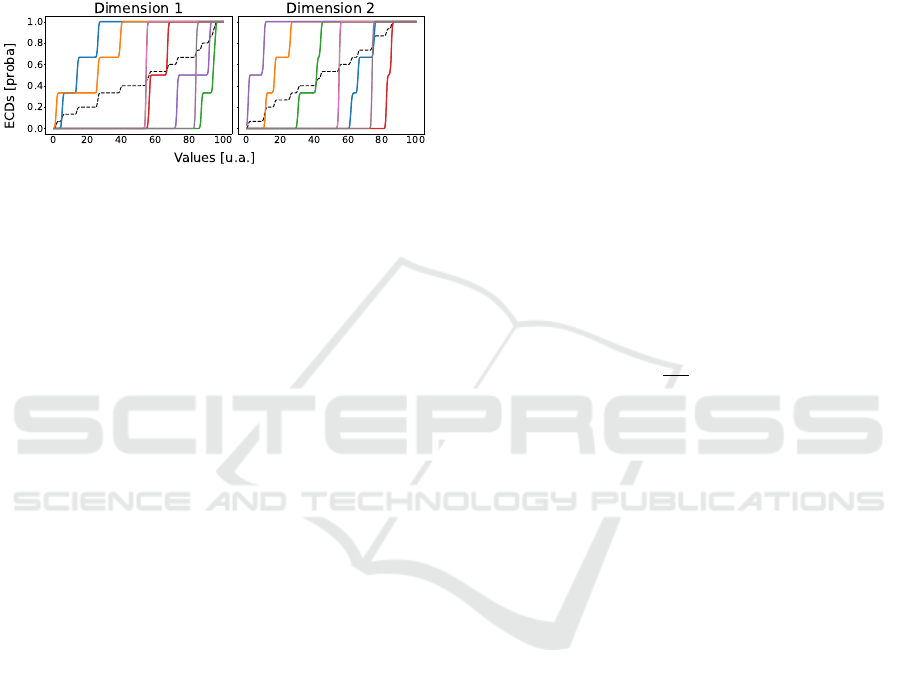
image on Figure 1); this gives an idea about what
does an ECD look like. Our methodology consists
in identifying the very similar and very close curves,
which would indicate that the two distributions are
very close in the feature space, and thus the clus-
ters alike. On the contrary, having no such proxim-
ity would indicate that the clusters are very different
(may be considered as a pledge of quality).
Figure 2: Example of ECDs, computed over BSOM’s clus-
ters (see rightmost image of Figure 1 for the clustering).
The dot black curve is the mean of all the colored ones.
3.3 Gathering of the Clusters
Once the clusters obtained and characterized, it is
time to process the results and see how to draw the
number of clusters from them.
As mentioned earlier, comparing two clusterings
sensu stricto is very difficult, for there is no true uni-
versal indicator; we propose to use the Empirical Cu-
mulative Distributions instead, so as to describe the
clusters, and therefore use these characteristics for our
comparison. That being said, a problem remains: how
to compare two ECDs? Indeed, they are sets of val-
ues, and, as such, what characteristic to use to state
on their closeness? One may think about comparing
their mean through a distance measure, but this is very
weak; since we told that the position and the angle of
the slope are great indicators, they may also be worth
being compared, but this is not really clear, nor really
easy though (should the slope position weight more
than its angle? Is 5° a small or large difference?).
Therefore, we preferred interpreting the results as
graphical curves, which they actually are. To take all
their characteristics into account in a simple and very
representative fashion, we decided to compare their
shapes themselves: to do so, we followed the feel-
ing of Dubuisson and Jain, who consider the Haus-
dorff distance as one of the most appropriate distance
functions for shape recognition (Dubuisson and Jain,
1994). The Hausdorff distance compares two graph-
ical shapes (such as curves), and gives a closeness
score, the lower the closer. This distance is therefore
very-well adapted to our purposes, and has the advan-
tage of being simple while also highly representative.
For two discretized shapes P = {p
i
}
i∈[[1,N
1
]]
and
Q = {q
j
}
j∈[[1,N
2
]]
, the Hausdorff distance sets a point
in P and searches for the minimal distance between it
and any point in Q; it does so for any point in P and
takes the maximal value among all of these minimal
distances. Since the minimum and maximum are not
symmetric, this operation must be done the other way
round by exchanging P and Q. Finally, so as to obtain
a symmetric distance, the Hausdorff distance takes the
maximum between both. It is given by formula (5).
d
h
P,Q
= max
h(P,Q),h(Q,P)
(5)
where h(X,Y ) is the maximal value of the minimal
distances between sets X and Y, as given by 6. Notice
that generally h(X,Y ) ̸= h(Y, X ) (no symmetry).
h(X,Y ) = max
x∈X
min
y∈Y
d(x, y)
(6)
This definition has the drawback of ignoring most
values (only the maximum is considered); to compen-
sate that, (Dubuisson and Jain, 1994) proposed the
Modified Hausdorff Distance (MHD), which replaces
the maximum by a mean in the definition of h, more
representative of the shapes, as given by (7).
h
MHD
(X,Y ) =
1
|X|
∑
x∈X
min
y∈Y
d(x, y)
(7)
The final definition of the MHD remains (5), but
using h
MHD
instead of h.
The (Modified) Hausdorff Distance is just an indi-
cator on the resemblance of two shapes: it is pairwise.
In our case, we have K clusters, therefore this distance
must be computed for any pair of cluster’s empirical
cumulative distributions, and that in any of the space’s
dimension. As a consequence, all these distances can
be gathered in a square matrix M ∈ R
K×K
; since the
MHD is built to be symmetric, the matrix will be sym-
metric as well, and since the MHD between a shape
and itself is null
d
h
(X, X) = 0
, its diagonal will be
full of zeroes, as shown by (8).
M =
ECD
1
ECD
2
··· ECD
K
ECD
1
0 d
(1,2)
h
··· d
(1,K)
h
ECD
2
d
(2,1)
h
0 ··· d
(2,K)
h
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
ECD
K
d
(K,1)
h
d
(K,2)
h
··· 0
(8)
where d
(i, j)
h
is the (Modified) Hausdorff Distance be-
tween ECD
i
and ECD
j
: d
(i, j)
h
= d
h
ECD
i
,ECD
j
.
Finally, once this matrix fulfilled, we propose to
use it to estimate the empirically optimal number of
clusters of the database. Indeed, if a value is low, it
means that the curves are graphically close, and thus
the data distributions are physically close alike, and
ETCIIM 2022 - International Workshop on Emerging Trends and Case-Studies in Industry 4.0 and Intelligent Manufacturing
284

therefore the clusters very likely belong to the same
database’s sub-region: merging them would probably
increase the clustering’s representativeness.
From there raises the question of how to con-
nect the ECDs with each other; indeed, there is often
many possible configurations. Consider the scenario
of three clusters aligned, regularly spaced of a Haus-
dorff distance α, as shown below:
C
1
C
2
C
3
α α
The corresponding matrix of the ECDs would
therefore be the following:
M =
0 α 2α
α 0 α
2α α 0
Assuming α is low, pairs {C
1
,C
2
} and {C
2
,C
3
}
are two possible candidates for merging. Nonethe-
less, the question to know what to do with C
2
remains:
since it belongs to two different pairs, should it be
merged with C
1
or with C
3
? From there, four possi-
bilities appear: 1- Do nothing; 2- Fuse C
2
with C
1
;
3- Fuse C
2
with C
3
; 4- Fuse the three clusters as one
(but is 2α a low enough distance?). This simple ex-
ample shows the problematic we are facing: there are
different cases, and there is no universal solution to it
(incidentally, this is the main problem with hierarchi-
cal clustering). To handle that, we propose to adopt a
Region Growing approach (Rabbani et al., 2006).
Indeed, this hierarchical clustering method draws
a point, assimilates it to a cluster’s barycenter, then
aggregates all the surrounding points at a maximum
distance of ρ, repeats this procedure for each one of
these neighbors, and continues to do so until there is
no more point at a maximum distance of ρ from any
point of this cluster not belonging to it or to any other
cluster. Once this cluster built, the procedure is re-
peated anew with another not-yet-assigned point, un-
til all the database’s points are categorized. This pro-
cedure can be serial (concurrent), by starting a new
cluster only when the last one has been completely
built, or it can be parallel, by building several clus-
ters at the same time. The first ensures large clusters,
whilst the second leads to more, smaller of them.
Region growing can be considered in two ways:
either the data are truly fused into real entities (clus-
ters), or they can just be linked to one another, some-
how forming a map. Even though the two methods are
all the same, the second is more graphical, and thus
can ease the reading; in our case, the idea is to create
a graph whose nodes are the ECDs (or equivalently
the clusters), and the edges represent the connections
between them when they are less distant than ρ.
We propose to use this procedure to gather the
ECDs, which has the advantage of being efficient and
proposing a solution to the above problem. In our
case, assuming α is low (i.e., α ≤ ρ), C
1
will be linked
to C
2
on the one hand, and C
2
will be linked to C
3
on
the other hand. As a consequence, we will get the or-
ganized set {C
1
,C
2
,C
3
}, meaning that C
1
will be in-
directly linked to C
3
through the intermediary of C
2
.
Following this procedure, Figure 3 gives an ex-
ample of configurations we could have (assuming the
arrows represent distances lower that ρ).
C
1
C
2
C
3
C
4
Group 1
C
5
C
6
C
7
Group 2
C
8
Group 3
C
9
C
10
C
11
Group 4
Figure 3: Example of region growing clustering and the re-
sulting cluster’s ECDs mapping.
Region growing clustering aims to identify the
sub-regions of the feature space, which is actually the
basis of the estimation of the number of clusters. In-
deed, blindly attempting to find the correct clusters,
with no knowledge provided upstream, is like trying
to find a needle in a haystack: nonetheless, it is much
easier to just search for the sub-regions of the space
instead of the true clusters. In reality, most clustering
methods work this way: they are based on the notion
of attraction, represented by the barycenters; that is
called their Region Of Influence (ROI), i.e., the area
around them within which any point can be aggre-
gated to them. This last point justifies our choice in
the gathering of the ECDs by region growing.
Finally, our estimation of the number of clusters is
the number of subgroups built from the ECDs, eventu-
ally gathered by following a region growing approach.
This can be done by just reading the matrix of the
ECDs M; indeed, if a value is low (according to a
threshold), it means that the two corresponding ECDs
(and thus clusters) can be connected to one another.
As such, to operate the region growing clustering, one
just has to create a map of all the clusters and link
them within; to do so, just find the lowest values of
the matrix and add the corresponding connections to
ECD Test: An Empirical Way based on the Cumulative Distributions to Evaluate the Number of Clusters for Unsupervised Clustering
285
the map. Once done, the map can be easily read, and
the estimated optimal number of clusters is simply the
number of disconnected groups (regions).
3.4 Summary of the Proposal
To make clearer our methodology, this subsection
aims to summarize the previous ones. Its different
steps can be enumerated as follows:
1. Cluster a database using an unsupervised, data-
driven clustering method from the state-of-the-art,
with a high value set for the number of clusters. It
may be the K-Means, the Self-Organizing Maps
or the Bi-Level SOMs for instance.
2. Compute the ECDs for every cluster, in every di-
mension, using (4).
3. Compute the MHDs between any pair of ECDs
using (5) and (7), and gather all of them within a
matrix, such as shown in (8).
4. Gather all the MHDs of the matrix into compact
and similar regions using Region Growing clus-
tering, as shown in Figure 3.
5. Read the so-built cluster’s ECDs mapping: the es-
timated number of clusters K
′
of the database is
the number of regions identified.
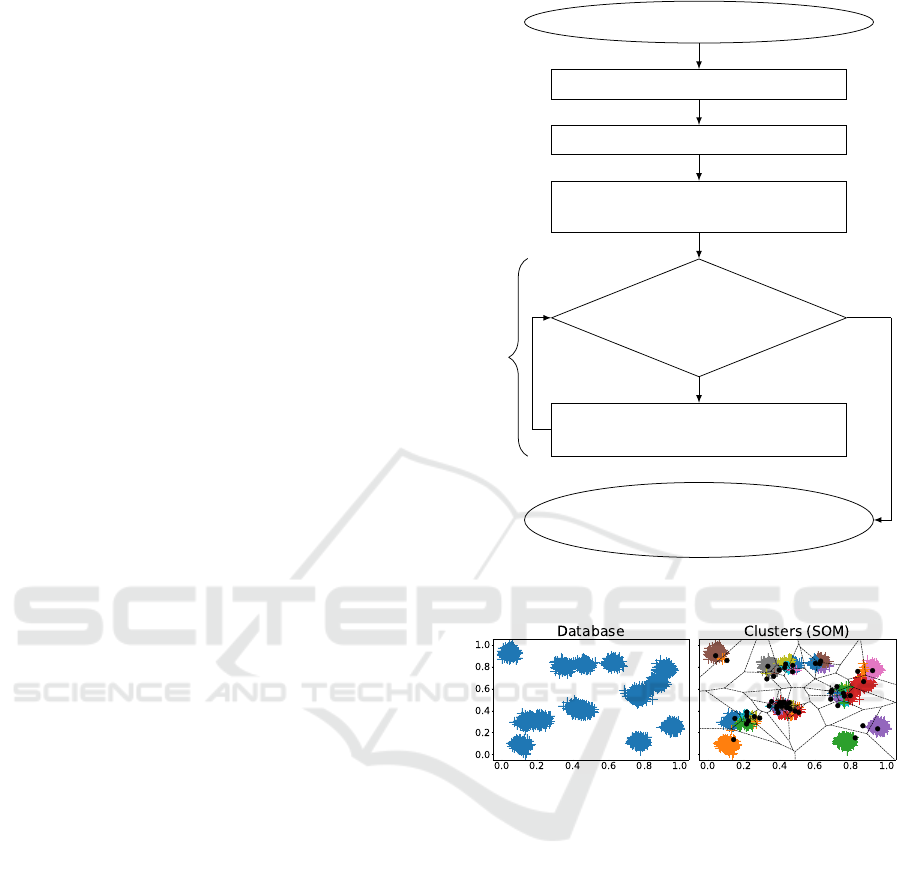
All this methodology is graphically summarized
in a flowchart as of Figure 4.
4 RESULTS
In this section, we will apply the proposed method to
an academic dataset in order to show how it works
step by step and how to interpret each of them. We
will then apply this methodology to real industrial
data to show its potential in real conditions.
4.1 Academic Dataset
To illustrate our approach, consider first a simple but
truly didactic example: a set of fifteen 2D Gaussian
distributions. We will mainly use the Self-Organizing
Map, but we will also try the K-Means and BSOM.
Figure 5 depicts both the original database (left) and
the clustered data using a 10 × 10 SOM (right). We
remind that the first step is to break the input database
in very small pieces, whence the large number of
SOM’s grid’s nodes (100). Notice that the objective
number of clusters should be a dozen, depending on
the accuracy one wants to achieve; indeed, for in-
stance, on the right of the leftmost image on the figure
(the dataset), three clusters are clearly overlapping,
Database to analyse
Cluster the database (K high)
Compute the ECDs for each cluster
Build the matrix of the MHDs &
Initialize the linkage map (no edge)
∃(i, j), d
(i, j)
h
≤ ρ
& (i, j) /∈ map
Add edge between
ECD
i
and ECD
j
in map
Estimate K
′
as the num-
ber of groups in map
Yes
No
Region Growing
Figure 4: Flowchart of the proposed method for empirical
estimation of the number of clusters in a database.
Figure 5: Results of the SOMs with a 10 × 10 grid.
thus should they be considered as different or as one
unique data group? Depending on the accuracy, one
may identify up to 9-12 different groups; this range of
numbers is the objective of our proposed method.
The SOM led to 48 empty clusters (this is made
possible by the learning procedure), which will not
be considered in the following. As such, Figure 6 de-
picts the Empirical Cumulative Distributions of the
52 nonempty clusters. There are too many curves
to clearly identify the different groups; nonetheless,
this image is interesting for it shows what do ECDs
look like with real data, and to remember that they
must be computed in any dimension, whence the two
subgraphs. Moreover, in our approach, an important
thing to remind is that to consider two ECDs as close,
they must be in all dimensions. For instance, the pink
and violet curves at the extreme right in the leftmost
image are very close in that dimension, but not in the
ETCIIM 2022 - International Workshop on Emerging Trends and Case-Studies in Industry 4.0 and Intelligent Manufacturing
286

Figure 6: ECDs of the clustering (rightmost image of Fig-
ure 5). The dot black curve is the mean of all the colored
curves, each corresponding to the ECDs of a unique cluster.
second one: therefore, they can not be considered as
close, whence the validation of the closeness in every
dimension, and the final comparison of the matrices
of the MHDs in all dimensions.
Now that the clusters have been built and that their
ECDs have been computed, their Modified Hausdorff
Distances must be computed and gathered within the
MHD Matrices, for each dimension. Table 1 presents
a part of these matrices: M
T
1
and M
T
2
are these ma-
trices compared term by term to a threshold ρ, fol-
lowing region growing clustering; if a pair of ECDs
has a MHD lower than ρ, this pair is tagged with the
Boolean True (noted T in the rightmost matrices), and
False else (noted F). Finally, to test if two ECDs are
actually close, the final matrix of the pairs is given by
logical and &: M = M
T
1
& M
T
2
, as depicted on Table 2.
This matrix allows to gather the pairs into full
groups of ECDs, by region growing clustering: two
pairs are connected if they share at least one com-
mon ECD. For instance, {11,19} and {11,22} are
two such pairs, since they share ECD
11
. Finally,
the formed groups are the following: {10,18} in
red, {11,19,22} in green, {14,15, 20} in orange, and
{12,16,21,23,24} in blue. These pairs are mapped
as of Figure 7; notice that connections are completed
with dot edges with the whole matrix (for instance,
ECD
14
and ECD
15
are not connected in Table 2, but
they actually are in the full matrix). In short words,
that means that for 14 clusters considered here, they
actually form 5 groups: the number of clusters here
should therefore be 5 (the blue, red, green and orange
ones, plus the isolated cluster 13).
Finally, by reading the full matrix and creating the
full map, we obtain the following groups: {1}, {2},
{3}, {4, 44}, {5, 41}, {6, 31}, {14, 15, 20}, {0,
11, 19, 22, 28, 39, 51}, {7, 10, 18, 27, 29, 36, 45,
48}, {8, 9, 13, 32, 34, 40, 42, 47}, {12, 16, 17, 21,
23, 24, 25, 26, 30, 33, 35, 37, 38, 43, 46, 49, 50}.
These groups are the final ones, i.e., the compact re-
gions of the space; by enumerating these regions (thus
groups), we obtain our estimate for the number of
clusters, whence K
′
= 11, which is in our objective
range of 9-12, and especially very close to the real
number of non-overlapping clusters.
Finally, to generalize a little, Table 3 gathers
the mean estimated number of clusters using SOM,
BSOM and K-Means. Each method has been run 100
times, and some statistics are presented in the table.
The three methods provide similar estimates, liv-
ing in the same range. It is hard to state on which is
the best, for it depends on the user’s needs. Indeed, as
discussed with Figure 5, several numbers of clusters
can be accepted: 9-10 if one only thinks by full re-
gions (possible clusters’ overlapping), or 12-14 if one
wants more accurate groups. As such, depending on
the accuracy, one method can be preferred over the
two others. For instance, the K-Means gave the low-
est number of clusters, with a very low standard devi-
ation: it can be used to get consistent results; on the
contrary, BSOM gave about 12 clusters, which is ac-
tually the closest to the reality (cluster by cluster): it
can be used to get clearer clusters, with finer borders.
Moreover, we have not talked about cluster’s quality,
but maybe these values are all great and are the most
appropriate for their respecting clustering method.
Anyway, these results seem very promising, and
indicate that the proposed method works very well, at
least with this academic example. Moreover, it proved
to be resilient to the clustering method used: there is
no huge gap with the results when using a method or
another, which is somehow reassuring.
4.2 Real Industrial Data
Now that the method has been validated over an aca-
demic dataset, so as to test it and also to show step
by step how it works, it is time to apply it to a real
context, i.e., real industrial data. These data were pro-
vided to us by Solvay
®
, a chemistry plant specialized
in Rare Earth specialties extraction. They are one of
the HyperCOG partners, a H2020 European project
whose main aim is to study the feasibility of the Cog-
nitive plant, i.e., the intelligent and autonomous in-
dustry of tomorrow (Industry 4.0).
12
16
21
23
24
19
11
22
14
15 20
10
18
Figure 7: Mapping of the MHDs.
ECD Test: An Empirical Way based on the Cumulative Distributions to Evaluate the Number of Clusters for Unsupervised Clustering
287

Table 2: Final matrix of the closeness of the ECDs, for all
dimensions, given as the logical and between all the cor-
responding matrices in any dimension. The True T have
been regrouped by color, following region growing cluster-
ing: one color per final group (region).
M
T
1
& M
T
2
=
18 19 20 21 22 23 24
10 T F F F F F F
11 F T F F T F F
12 F F F T F T T
13 F F F F F F F
14 F F T F F F F
15 F F T F F F F
16 F F F T F F T
The process we are studying at Solvay
®
is the
Rare Earth separation from raw material; this step is
performed in what is called a ”battery”. The data we
will work with in this section came from one of these
batteries: they were recorded over seven work weeks,
at a rate of one per minute, for a total of 65,505 data
samples, over 14 sensors (and thus as many dimen-
sions in the feature space). For confidentiality con-
cerns, these data have been normalized. Following
our work (Molini
´
e et al., 2022), there should be about
7-10 real behaviors in this battery, and thus as many
objective clusters (one per real system’s behavior).
Table 3: Estimated number of clusters using different clus-
tering methods after 100 runs each, with 100-node grids for
SOM and BSOM, and K = 50 for the K-Means.
Method Mean Std Min Max
K-Means 10.04 0.86 9 12
SOM 10.21 1.44 8 14
BSOM 12.21 1.18 10 16
This range of values is therefore our objective here.
Figure 8 depicts two of these sensors over time
(left), their respective feature space on the top right
hand corner (sensor 2’s data against sensor 1’s), and
the corresponding clustering below, using the BSOM.
Notice that the clustering was performed using all the
sensors/dimensions, but only two are depicted for the
sake of conciseness.
BSOM used 10 SOMs, with 100 nodes each; the
final clustering contains 61 nonempty clusters, with
which we will deal. The ECDs have been computed
for every cluster, and then compared to one another
using the MHD, and the final state matrix of all the
pairs’ MHDs has been built. Table 4 gives a por-
tion of that matrix, where, anew, T corresponds to
a close pair, and F to a distant one. The sensors’
tag numbers have been added on the top and left as
small italic numbers. The colors corresponds to the
Table 1: Part of the MHDs matrices for every dimension (left) and the state on the closeness for every pair of ECDs (right), in
which T means that the two ECDs involved in the corresponding pair are close, and F else. The indexes of the cluster’s ECDs
are indicated at the very start of every row, and at the top of every column as small italic numbers.
M
T
1
=
Dimension 1 M
1
z }| {
18 19 20 21 22 23 24
10 0.90 9.20 2.50 0.30 10.2 1.20 1.60
11 7.00 0.40 17.0 9.10 0.50 5.60 4.50
12 0.50 7.90 3.10 0.50 8.90 0.60 1.00
13 16.3 37.9 5.60 12.7 39.8 17.7 19.3
14 6.20 21.0 0.80 4.00 22.4 6.90 7.90
15 6.20 21.1 0.70 4.00 22.6 7.00 8.00
16 0.50 5.40 4.50 1.10 6.30 0.40 0.50
≤ ρ =
18 19 20 21 22 23 24
10 T F F T F T T
11 F T F F T F F
12 T F F T F T T
13 F F F F F F F
14 F F T F F F F
15 F F T F F F F
16 T F F T F T T
M
T
2
=
Dimension 2 M
2
z }| {
18 19 20 21 22 23 24
10 0.40 26.9 0.30 22.9 33.8 23.1 19.5
11 32.3 0.60 31.1 1.90 0.60 1.30 2.10
12 23.0 1.00 22.1 0.50 2.60 0.40 0.50
13 12.3 6.30 11.6 4.50 9.80 4.60 3.10
14 0.60 25.8 0.50 21.9 32.7 22.2 18.5
15 0.50 30.3 0.60 26.1 37.7 26.4 22.4
16 19.6 1.70 18.7 0.80 3.70 3.50 0.30
≤ ρ =
18 19 20 21 22 23 24
10 T F T F F F F
11 F T F F T T F
12 F T F T F T T
13 F F F F F F F
14 T F T F F F F
15 T F T F F F F
16 F F F T F F T
ETCIIM 2022 - International Workshop on Emerging Trends and Case-Studies in Industry 4.0 and Intelligent Manufacturing
288

Figure 8: Possible clustering obtained with real industrial
data. On the left, the two sensor’s data over time; on the
right, their corresponding feature space (sensor 2’s data
against sensor 1’s) and the clustering given by BSOM.
Table 4: Example of the all-dimension state matrix.
M =
44 45 46 47 48 49 50
33 F F F F F T T
34 F F F F F F T
35 F T F F F F F
36 F F F F F F T
37 F F F F F F F
38 F T F F F F F
39 T F F T F F F
groups formed by region growing: {33,34,36,49,50}
in blue, {35,38,45} in green, and {39, 44, 47} in red.
The corresponding map is depicted on Figure 9,
where the numbers correspond to the ECDs (e.g.,
”34” means ECD
34
); the plain edges are that drawn
from the matrix, and the dotted edges are that drawn
when considering all the 61 clusters.
The results mean that there actually are 5 groups:
the colored ones, plus the isolated {37} and {48}.
Finally, the full groups are the following (”x-y” means
all values between x and y): {37}, {43}, {53}, {27,
42, 48}, {28, 35, 38, 45, 60}, {2-5, 16, 18, 19, 23,
30, 32, 41, 46, 54, 58}, {0, 1, 6-15, 17, 20-22, 24-26,
29, 31, 33, 34, 36, 39, 40, 44, 47, 49-52, 55-57, 59}.
As a consequence, there are 7 groups of clusters, and
therefore, the estimated number of clusters is K
′
= 7,
which is actually the one we were expecting.
50
34
33 36
49
35
38
45
39
44
47
Figure 9: Example of mapping of the Battery.
Table 5: Number of regions obtained with the Solvay’s data,
using each of the three clustering methods, run 100 times,
with 100 nodes for SOM and BSOM, and 50 for K-Means.
Method Mean Std Min Max
K-Means 3.9 0.98 2 6
SOM 7.98 2.05 3 12
BSOM 8.46 2.54 4 15
Eventually, Table 5 compares the results obtained
when using the three clustering methods introduced
earlier, run 100 times: the mean, standard deviation,
minimum and maximum for each method.
The results of this table are close to that drawn
from the academic dataset: BSOM is the closest to re-
ality, with the best range, but a high scattering, closely
followed by SOM; the K-Means has the least scat-
tered results, but the number of regions identified is a
little low. That being said, all the three methods have
provided acceptable estimates (no aberration nor out-
liers), which confirms the universality of our method.
5 CONCLUSION
Unsupervised clustering is a blind approach which
aims to point out the similarities and hidden patterns
of an unknown database. They are automatic, but gen-
erally require an important parameter as of the ex-
pected number of clusters. This parameter must be
set manually, and the choice of one value over an-
other may change the clustering’s representativeness
in depth. In this paper, we have addressed the prob-
lem of the automatic estimation of the empirical op-
timal number of clusters to be set as meta-parameter
for an unsupervised, data-driven clustering method.
To that purpose, we propose the ECD Test, which
aims to estimate the empirically most suited number
of clusters. Whilst most approaches from literature
operate several clusterings by varying the number of
clusters, and by selecting that achieving the best re-
sults, we rejected that idea, for it is closer to a true
brute-force clustering rather than a real estimation
of the number of clusters. Our method relies on a
hierarchical aggregation of the characteristics of the
database so as to propose a judicious estimate.
Indeed, we propose to operate a unique clustering,
with a high number of clusters, compute the Empirical
Cumulative Distributions to characterize the clusters,
and finally bring the clusters together according to the
closeness of their respective ECDs. To do so, we com-
pute the Modified Hausdorff Distance between any
couple of two ECDs, and gather all these measures
into a unique matrix, whose values are compared to a
threshold: if a value is low, then the involved ECDs
ECD Test: An Empirical Way based on the Cumulative Distributions to Evaluate the Number of Clusters for Unsupervised Clustering
289

(and then clusters) are considered as close. Finally, all
these measures are linked to one another into a map
by region growing clustering, allowing to rebuild the
regions of the feature space. The number of isolated
groups of clusters is somehow the number of regions
of the feature space, and therefore a very good esti-
mate for the optimal number of clusters.
We assessed this methodology over an academic
dataset consisting in fifteen 2D-Gaussian Distribu-
tions, and then over real industrial data. In both cases,
we found back about the number of clusters we had
expected, i.e., a ten in both cases. We tested three
clustering methods (K-Means, SOMs and Bi-Level
SOMs) to show the resilience of our methodology,
which proved to be highly reliable in any context,
even with unsupervised data-driven approaches.
The ECD Test tool is very helpful to prepare the
ground for some sort of next steps. In our next works,
we will endeavor to use it in wider situations, and to
use it so as to get the best clustering as possible on
real datasets. A great and accurate clustering is of
major importance in many contexts, such as multi-
modeling the system under consideration (one local
model for each cluster): this is the solution we are ac-
tually working on, and the reason why we addressed
the problem raised in this paper.
ACKNOWLEDGEMENTS
This paper received funding from the European Union
Horizon 2020 research and innovation program under
grant agreement N°695965 (project HyperCOG).
REFERENCES
Amorim, R. and Hennig, C. (2015). Recovering the number
of clusters in data sets with noise features using fea-
ture rescaling factors. Information Sciences, 324:126–
145.
Defays, D. (1977). An efficient algorithm for a complete
link method. Comput. J., 20:364–366.
Dhillon, I., Guan, Y., and Kulis, B. (2004). Kernel k-means,
spectral clustering and normalized cuts. KDD-2004 -
Proceedings of the Tenth ACM SIGKDD International
Conference on Knowledge Discovery and Data Min-
ing, 551-556.
Dubuisson, M. and Jain, A. (1994). A modified hausdorff
distance for object matching. In Proceedings of 12th
International Conference on Pattern Recognition, vol-
ume 2, pages 566,567,568, Los Alamitos, CA, USA.
IEEE Computer Society.
Goutte, C., Hansen, L., Liptrot, M., and Rostrup, E. (2001).
Feature-space clustering for fmri meta-analysis. Hu-
man brain mapping, 13:165–83.
Hassani, H. and Silva, E. S. (2015). A kolmogorov-smirnov
based test for comparing the predictive accuracy of
two sets of forecasts. Econometrics, 3(3):590–609.
Honarkhah, M. and Caers, J. (2010). Stochastic simula-
tion of patterns using distance-based pattern model-
ing. Mathematical Geosciences, 42:487–517.
Kohonen, T. (1982). Self-organized formation of topolog-
ically correct feature maps. Biological Cybernetics,
43(1):59–69.
Lloyd, S. P. (1982). Least squares quantization in pcm.
IEEE Trans. Inf. Theory, 28:129–136.
Marutho, D., Hendra Handaka, S., Wijaya, E., and Muljono
(2018). The determination of cluster number at k-
mean using elbow method and purity evaluation on
headline news. In 2018 International Seminar on Ap-
plication for Technology of Information and Commu-
nication, pages 533–538.
Molini
´
e, D. and Madani, K. (2021). Characterizing n-
dimension data clusters: A density-based metric for
compactness and homogeneity evaluation. In Pro-
ceedings of the 2nd International Conference on In-
novative Intelligent Industrial Production and Logis-
tics – IN4PL, volume 1, pages 13–24. INSTICC,
SciTePress.
Molini
´
e, D., Madani, K., and Amarger, V. (2022). Cluster-
ing at the disposal of industry 4.0: Automatic extrac-
tion of plant behaviors. Sensors, 22(8).
Molini
´
e, D. and Madani, K. (2022). Bsom: A two-
level clustering method based on the efficient self-
organizing maps. In 6th International Conference on
Control, Automation and Diagnosis (ICCAD). [Ac-
cepted but not yet published by July 29, 2022].
Molini
´
e, D., Madani, K., and Amarger, C. (2021). Identi-
fying the behaviors of an industrial plant: Application
to industry 4.0. In Proceedings of the 11th Interna-
tional Conference on Intelligent Data Acquisition and
Advanced Computing Systems: Technology and Ap-
plications, volume 2, pages 802–807.
Pelleg, D. and Moore, A. (2002). X-means: Extending k-
means with efficient estimation of the number of clus-
ters. Machine Learning.
Rabbani, T., Heuvel, F., and Vosselman, G. (2006). Seg-
mentation of point clouds using smoothness con-
straint. International Archives of Photogrammetry,
Remote Sensing and Spatial Information Sciences, 36.
Rousseeuw, P. (1987). Silhouettes: A graphical aid to the in-
terpretation and validation of cluster analysis. Journal
of Computational and Applied Mathematics, 20:53–
65.
Rybnik, M. (2004). Contribution to the modelling and the
exploitation of hybrid multiple neural networks sys-
tems : application to intelligent processing of infor-
mation. PhD thesis, University Paris-Est XII, France.
Sibson, R. (1973). Slink: An optimally efficient algorithm
for the single-link cluster method. Comput. J., 16:30–
34.
Simard, R. and L’Ecuyer, P. (2011). Computing the two-
sided kolmogorov-smirnov distribution. Journal of
Statistical Software, 39(11):1–18.
Tibshirani, R., Walther, G., and Hastie, T. (2001). Estimat-
ing the number of clusters in a data set via the gap
statistic. Journal of the Royal Statistical Society Se-
ries B, 63:411–423.
ETCIIM 2022 - International Workshop on Emerging Trends and Case-Studies in Industry 4.0 and Intelligent Manufacturing
290
