
Wireless Industrial Communication and Control System: AI Assisted
Blind Spot Detection-and-Avoidance for AGVs
Sergiy Melnyk
1 a
, Shreya Tayade
1 b
, Mervat Zarour
1 c
and Hans D. Schotten
1, 2 d
1
Intelligent Networks, German Research Center for Artificial Intelligence, Kaiserslautern, Germany
2
Indtitute for Wireless Communication and Navigation, University of Kaiserslautern, Kaiserslautern, Germany
Keywords:
Edge Cloud, Industrial Control, Wireless Closed Loop Control, AI based Channel Prediction, Communication
Control Co-design, Multi-link Communication, Flexible Coding, Low Latency, High Reliability
Abstract:
An Edge cloud based industrial control systems set high requirements on the latency and reliability of wire-
less communication link. In order to improve the performance of the communication system, an approach
of industrial control and communication co-design is proposed. The system consists out of three compo-
nents; Artificial Intelligence(AI) control, Industrial control and Communication control. An AI predictive
algorithm forecasts the expected signal strength and detects the potential coverage blind spots on a factory
floor. Based on this, industrial control system adjusts the paths for AGVs in order to spatially as well as
timely avoid the communication drops. The communication control manages the communication resources
taking into consideration the present control requirements and AI predicted channel information. Besides, the
communication system is enhanced by multi-RAT capability in order to further increase the communication
reliability. The investigations show that AI based industrial control and communication co-design approach
provides an increase of the reliability of communication link. Even more, the proposed system features the
ability of reliability guarantee, based on the applications’ requirements.
1 INTRODUCTION
One of the major achievements of the industrial rev-
olution Industry 4.0 is the introduction of the wire-
less communication to manufacturing areas (Aktas
et al., 2017). Since the manufacturing devices or even
the parts of the devices gained the ability to com-
municate with each other, new possibilities for flex-
ible and scalable industrial applications of the future
have emerged. Among the targeted application fields
are factory automation, process automation, closed
loop control. Also, human related applications such
as human-machine interaction or different kinds of
workers assistance gain advantages of wireless com-
munication. This large variety of applications also
put heterogeneous requirements on the wireless com-
munication system. Thus, the Radio Access Tech-
nology (RAT) utilised should provide high amount of
flexibility in order to serve different kind of applica-
tions.
a
https://orcid.org/0000-0001-7724-7202
b
https://orcid.org/0000-0003-3144-0263
c
https://orcid.org/0000-0003-3325-2637
d
https://orcid.org/0000-0001-5005-3635
Further promising technology emerged in recent
years is edge cloud computation. It provides some
benefits also to industrial control applications. The
actuators are usually less powerful devices which are
tailored to low energy consumption. Offloading the
processing and the controller to the cloud may reduce
the power consumption at the device. Moreover, an
edge cloud as a centralized entity provides a possibil-
ity of an easy interconnection of applications running
on different devices and promotes collaborative work-
ing.
In this paper, Automated Guided Vehicle (AGV)
control use case is considered as an illustrative ex-
ample. Especially mobile devices are more prone to
interference, Doppler shifts and channel deep fading,
which leads to drop of communication link quality.
Thus, the reliable communication, which is critical
for control applications, cannot be guaranteed. Un-
fortunately, this effects are of stochastic nature and
cannot be easy modeled. Nevertheless, an AI algo-
rithm shown in this paper is able to predict the drops
of the link quality, which we call blind spots, so that
counter measures can be applied on time.
Melnyk, S., Tayade, S., Zarour, M. and Schotten, H.
Wireless Industrial Communication and Control System: AI Assisted Blind Spot Detection-and-Avoidance for AGVs.
DOI: 10.5220/0011583100003329
In Proceedings of the 3rd International Conference on Innovative Intelligent Industrial Production and Logistics (IN4PL 2022), pages 307-313
ISBN: 978-989-758-612-5; ISSN: 2184-9285
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reser ved
307

In order to effectively withstand link quality
drops, a communication control co-design approach
is proposed. On the one hand, the communication
system itself is enhanced to mitigate deep fading ef-
fects. It is realized by utilising a combination of sev-
eral RATs such as WLAN, 5G or other. Since any
RAT is utilising an other frequency band, the proba-
bility of deep fading on every channel is significantly
lowered. Thus, distributing communication via sev-
eral links provide an improvement on the overall link
reliability. On the other hand, AGVs are mobile plat-
forms, which are centrally controlled from the edge
cloud. By means of AI predictions, a blind spot may
be physically avoided by planning a path around it.
Due to outsourcing the industrial control to the edge
cloud, the overall complexity of the system is then
also reduced.
Even though AGV control is the leading use case
of this paper, the investigations fit also other control
applications. This is why we propose a flexible func-
tional architecture of the system, which is also appli-
cable to various industrial scenarios. Section 2 an
overview on the proposed architecture as well as a
brief description of its components. In following sec-
tions, the detailed insight in the three main compo-
nents AI based channel prediction, Industrial Control
and Communication Control is given. Finally, sec-
tion 6 summarizes the results of the paper.
2 FUNCTIONAL
ARCHITECTURE
The upcoming industrial revolution Industry 4.0 have
exemplified the necessity of wireless communications
in an industrial control. The transitioning of indus-
try from wired to wireless have imposed stringent re-
quirements on latency, reliability of wireless commu-
nications. In order to achieve the performance sim-
ilar to wired technology, the wireless system needs
to be adapted to fulfill the KPI requirements of an
Industrial control. Therefore, we present an Edge-
cloud based functional architecture of wireless indus-
trial control, as shown in Figure 1. An industrial con-
trol consists of a controller that is located in an edge
cloud. Based on the sensors data as well as actua-
tors feedback received, the controller generates con-
trol commands and sends them to the actuators. The
functions and in-depth description is presented in this
section.
2.1 Edge Cloud
An Edge cloud enables faster data computation and
processing to reduce latency for processing large
amount of data. Moving industrial control system to
the edge cloud enables centralized processing, collab-
oration and coordination of actuators and sensors in a
factory devices to realize a task. Moreover, the edge
cloud based industrial control allows faster informa-
tion exchange between the industrial control and the
communication control.
2.2 Industrial Control
The main functionality of an industrial controller is
to generate the control commands and inputs for the
actuators in the factory. The control commands are
applied to actuators to perform a specific task. The
control commands can be generated periodically or
even-triggered depending on the characteristic of the
control system. In a closed loop feedback control sys-
tem, i.e. AGV control, the control commands are gen-
erated and updated periodically. In the process au-
tomation and monitoring, the control command gen-
eration can be event-triggered and needs to be per-
formed only when the measurement data from sen-
sors are not within desired threshold. Depending on
the state of actuators and measurement data, the error
evaluation block determines the error by comparing
the current state with the desired state (output). The
evaluated error is then used by controller to generate
the control commands to mitigate the error. The er-
ror is evaluated from the feedback received from the
sensors and actuators over an uplink wireless channel.
2.3 Communication Control
Communication control is a spectrum-aware man-
agement component that controls the transmission of
control updates over a wireless channel. The com-
munication control ensures the availability of high
quality link to industrial control applications while si-
multaneously optimizing the utilisation of communi-
cation resources. The communication resources are
optimized by control aware resource allocation tech-
niques, such as presented (Tayade et al., 2020). The
Channel State Information (CSI) feedback received,
the link quality and the current control state are used
to optimally allocate resources over available RATs.
The RAT selection functionality selects the best per-
forming link from 5G, LTE WiFi or other, according
to the requirements of control application and current
communication channel state. Moreover, the com-
munication control provides optimal Modulation and
ETCIIM 2022 - International Workshop on Emerging Trends and Case-Studies in Industry 4.0 and Intelligent Manufacturing
308

Figure 1: Functional Architecture of Edge Cloud based industrial control.
Coding Scheme (MCS) selection based on the control
state of industrial application.
Furthermore, in presence of deep channel fading,
the communication control can delay the transmission
of control updates in order to save resources and pre-
vent losses of control information. For example, the
communication control can perform the task of re-
source management in an multi-AGV scenario assur-
ing that every AGV get enough resources to remain
stable. This means, the settings of any communica-
tion link should meet the latency as well as reliability
requirements of industrial control applications.
2.4 AI based Decision Making
In industrial control applications like process automa-
tion or multi-AGV control and coordination, a larger
amount of data from the sensor devices needs to be
processed. An AI based techniques can be adapted
to analyse the data and predict the future outcomes of
the control state as well as channel condition. As the
communication occurs over a wireless channel, out-
ages and packet losses could lead to the instability of
industrial control. As a consequence, the control in-
formation is not available at the actuators within the
latency constraints. AI based techniques can predict
the error and channel state and provide these informa-
tion to the industrial and communication control. The
AI based decider collects channel information, con-
trol state and the factory environment for evaluating
and predicting the future states.
3 BLIND SPOTS DETECTION
The automatic robust blind spot detector solves a
binary classification problem of identifying the blind
spots using Support Vector Classifier (SVC) and up-
dates the industry received power map. The classifi-
cation model must first be trained to optimally deter-
mine the model parameters. In the validation phase, it
needs to check whether the model has over-fitting or
under-fitting problems so that the classification model
can be generalized.
In the testing phase, the classifier should be able to
classify the industry map into two classes. Each posi-
tion in the industry map has one of the two class as-
signments, positions with or without sufficient recep-
tion power. The model must have high performance
to make a positive decision about the blind spot po-
sitions, so the blind spots detection class must have a
high positive predictive value and low miss rate.
SVC has to provide the solution to the positions
separation in the industry power map in online phase.
The blind spots position is taken as positive decision
During the design phase of an industrial communi-
cation system, the industry floor map is created to
provide the area with sufficient receiving power, tak-
ing into account the industry layout and the antenna
pattern. For analysis purposes, the industry map is
partitioned into square areas of 1 × 1 m
2
. These po-
sitions should have sufficient connectivity, reliability
and lower packet loss for the real time networked con-
trol system. However, the guarantee of reliable wire-
less connection is not provided due to time-varying
effects such as shadowing or multi-path fading which
occur in a highly dynamic environment with a lot of
metal surfaces.
Wireless Industrial Communication and Control System: AI Assisted Blind Spot Detection-and-Avoidance for AGVs
309

with industry map sampling distance 1 m. If the posi-
tion is provided with the required power within cov-
erage map, but the received signal power at these po-
sitions is less than the receiver sensitivity, the class
assignment is positive. If the positions is located out-
side the coverage map and has a large distance to the
transmitter or has received signal power more than the
receiver sensitivity, then the decision is for negative
class. In this way, SVC inspects the industry map at
each position with sampling distance of 1m.
Channel Data Generation. In training, validation
as well as model testing phase, the SVC needs chan-
nel measurement information in the industry envi-
ronment. This is generated using the channel mea-
surements in the QUAsi Deterministic RadIo chan-
nel GenerAtor (QuaDRiGa) model in industry sce-
nario. Multiple communication models are simulated
for line-of-sight (LOS) and non-line-of-sight (NLOS)
scenarios. The power map is generated under con-
sideration of all possible signal propagation path loss,
shadowing, multi path fading effect. Several differ-
ent power maps can be obtained for the same industry
layout with different communication system param-
eters. After that, each sampled position has to be la-
beled from prospective of the distance path loss power
map. Thereafter, the model is trained and L-fold is
validated.
Support Vector Classifier: the SVC can be con-
sidered as a function between input information and
output position classes. The input information is the
industrial wireless channel information, which is con-
sidered as a feature matrix [X] = x
j
(i); i = (1 : m); j =
(1 : n), whereas m is the number of features and n
is the number of positions to be considered. As the
output, the system must be able to assign the posi-
tion from industrial map in binary class assignments
y = {+1, −1}. The separation of the two classes
requires a nonlinear hyperplane. Moreover, a cor-
respondent linear separated hyperplane is preferred
based on the mapping Φ(x
i
) in the infinite dimension
using the radial basis kernel. With the kernel func-
tion, the nonlinear separation level can be achieved
without increasing the dimension value m of the vec-
tor space, i. e., either a mapping Φ(x
1
, x
2
) to the height
dimension space is used until linear separation is pos-
sible, or a kernel function K(x
i
, x
j
) = Φ(x
i
)
T
· Φ(x
j
)
is used, which has the condition that the kernel func-
tion must be an inner product in at least one feature
space. This will avoid the internal product in the op-
timization problem in the height-dimensional space.
The penalty parameter C represents the inverse effect
of the regularization parameter. The penalty param-
eter C and the kernel parameter σ can be optimally
configured using L-fold cross validation.
4 AGV TRAJECTORY PLANER
WITH BLIND SPOTS
AVOIDANCE SYSTEM
In this section, the AGV edge cloud control system
is considered. As shown in Figure 2, the AGVs are
moving on the factory floor. Due to low computation
power of the AGVs, they do not feature capabilities
for path planning or trajectory following. Any AGV
expects the control input signals to be provided by ex-
ternal control system, which is located on the edge
cloud. The AGVs follow the control signals and give
a feedback on their control states. The power consum-
ing computations of control signals are performed on
the edge cloud. Thus, edge cloud control system has
full control over the behaviour of the AGVs.
Edge cloud has to use wireless channel to com-
municate with AGVs, since these are highly mobile
platforms. In this case, wired communication chan-
nel is not feasible. However, the wireless link is the
critical part of the system, since both up- as well as
downlink may suffer deep fading effects, which af-
fects the whole control loop. This behaviour might be
mitigated by means of AI based blind spots detection
algorithm described in section 3.
The coverage blind spots elimination (CBSE) sys-
tem is the trajectory planning algorithm, which takes
periodic blind spots forecast updates into account in
order to avoid the communication link outage. In
following, detailed description of the CBSE system
components is presented.
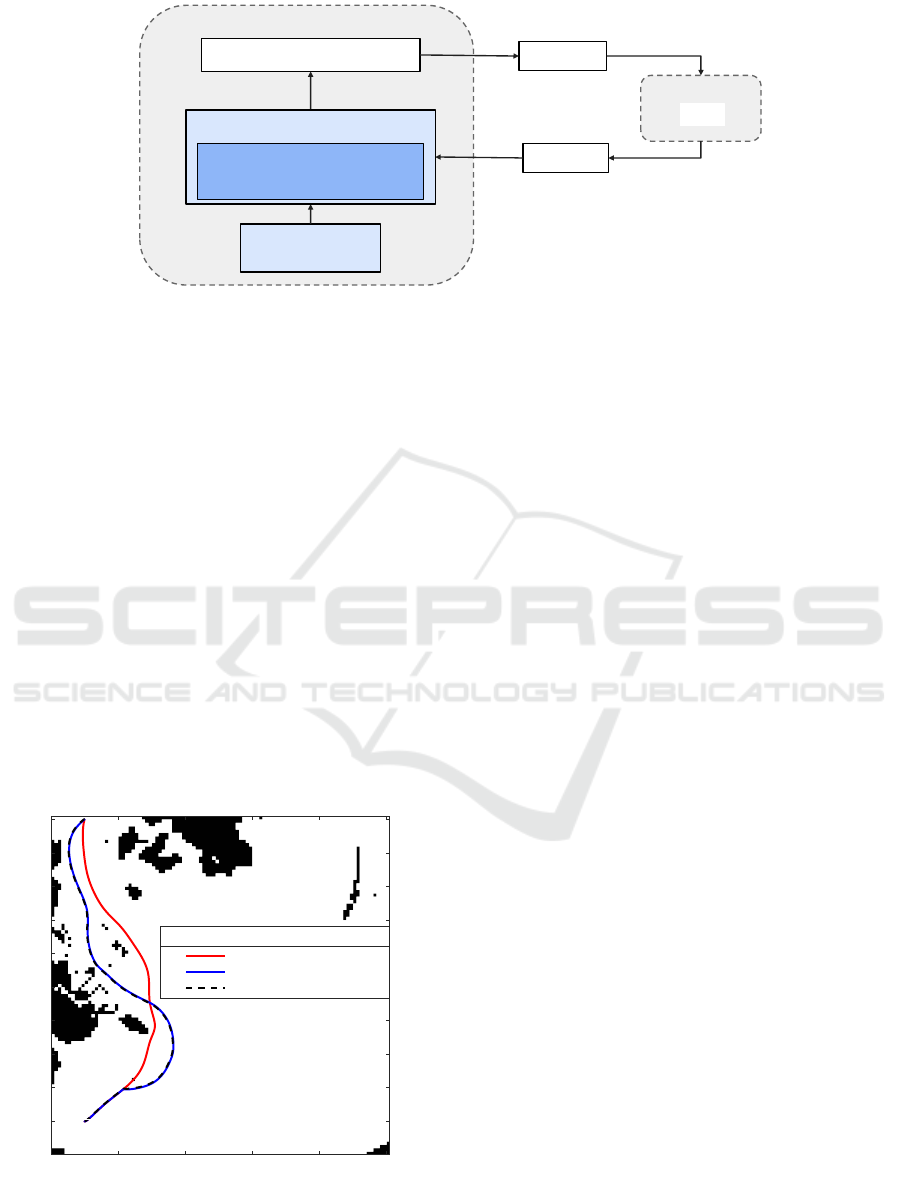
Reference Trajectory Planning. Initially, a start as
well as a destination position, which must be reached
within a given time T , is reported to the controller.
The AGV has to follow a shortest blind spot free path
to the destination. Trajectory planning starts with a
creation of a binary occupation map of the factory
floor. As can be seeing in Figure 3, white areas can
be accessed by an AGV, whereas black areas rep-
resent obstacles. Those are physical obstacles such
as walls, pillars, machines etc. Besides, blind spot
areas are also declared as obstacles to be avoided.
Thereby, blind spot detection algorithm provides an
up-to-date blind spot forecast. Afterwards, proba-
bilistic roadmap (PRM) algorithm (Kavraki et al.,
1996) is utilised in order to find the optimal trajectory
from start to the destination. This path is represented
with the red color in Figure 3.
ETCIIM 2022 - International Workshop on Emerging Trends and Case-Studies in Industry 4.0 and Intelligent Manufacturing
310
Edge-Cloud
Trajectory follower
Control state
Control input
• Channel state
• Industry layout
Factory floor
AGV
CBSE system
• Blind spots detector
• Refrence trajectory planner
Figure 2: Coverage blind spot elimination system.
Trajectory Replanning. needs to be performed pe-
riodically, since blind spots may occur spontaneously
and can be predicted on short time scale only. Thus,
on any update by blind spots detection algorithm, the
AGV’s trajectory needs to be reconsidered. If the tra-
jectory does not collide with the new occured blind
spots, no action is required.
However, Figure 3 shows the situation, in which
an AGV would suffer a connection drop, if it would
follow the red path. Thus, the PRM algorithm is ap-
plied again in order to plan an alternative trajectory,
which is shown with blue color. In this manner, an
AGV would avoid potential blind spots and keeps the
reliable communication channel to the edge cloud.
Trajectory Follower. is required to generate the
control inputs for the AGVs. The available trajec-
tory information in the trajectory (re-)planner out-
put presents only the xy-coordinates of the nodes,
SVC power predicted industry map
0 20 40 60 80 100
x-coordinate in m.
0
10
20
30
40
50
60
70
80
90
100
y-coordinate in m.
Initial reference path
Alternative reference path
Actual AGV traked path
LAD=1sec, cubic B-spline interpolation
Start position
(10,10)
Figure 3: Path replanning example – reference, alternative
and actual AGV path from start to destination.
whereas the path segments are non-uniform. How-
ever, the uniform path sampling with controller fre-
quency leads to an unfavorable jumping velocity pro-
file. With cubic Basis spline (B-spline) interpolation,
the availability of the first as well as the second path
derivative is assured. In Figure 3, the final trajectory
of the AGV is depicted with dashed line.
5 ADAPTIVE CODING FOR
MULTI-RAT RESOURCE
ALLOCATION
In order to further improve the reliability of a commu-
nication link, the packets to be sent may be distributed
via several communication channels, or RATs. In this
manner, local signal power drops like blind spots may
be mitigated, since this effects depend on transmitter
frequency, which differs for different RATs. How-
ever, packet duplication techniques such as Parallel
Redundancy Protocol (PRP) (Ehrig et al., 2017) or
MultiPath TCP (Paasch and Bonaventure, 2014) lead
to inefficient resource utilisation, since they do not
feature error correction capability for corrupted pack-
ets.
In contrast, fountain codes are able to produce as
many sub-codewords out of one packet, as it is re-
quired. That means, this codes are raterless, because
the coding rate can be flexibly adjusted due to re-
quirements. On the decoder side, a certain number of
sub-codewords should be received in order to decode
the packet (K-out-of-N-principle). However, fountain
codes require an erasure-channel, i. e., they can with-
stand a drop of sub-codewords, but they are not able
to correct the erroneous sub-codewords. In order to
mitigate this issue, fountain codes should be used in
conjunction with error-correcting codes, as proposed
in (Berger et al., 2008).
Wireless Industrial Communication and Control System: AI Assisted Blind Spot Detection-and-Avoidance for AGVs
311

(a) Estimated number N of RaptorQ sub-codewords per chan-
nel
(b) PER simulation with NS3
Figure 4: RaptorQ enhanced multi-RAT system for PER guarantee (PER threshold: 10
−3
).
Combined with multi-RAT transmission, fountain
codes provide a flexible tool to distribute a packet over
multiple links. Especially utilising channel prediction
algorithms, the number of sub-codewords to be sent
may be tailored to real channel conditions but chan-
nel estimations. This provides further improvement of
reliability, whereas resource utilisation remains opti-
mal.
In our investigations, we considered a system
based on two OFDM communication links. As a
fountain code to work with, RaptorQ code was cho-
sen. A packet should be encoded with RaptorQ, and
the generated sub-codewords should be sent through
both links. The goal is to generate the number of
sub-codewors sufficient to meet a reliability theshold
based on the Signal-to-Noise-Ratio (SNR) prediction
for each channel.
For the estimation of the number N of packets to
be sent per channel, analytical error estimation for
OFDM signals was performed. In order to reduce
simulation time, Packer Error Rate (PER) thresh-
old of 10
−3
was selected. However, the result can
be translated to such demanding thresholds as 10
−9
and less. Figure 4a shows the estimated number N
for both channel models based on SNR per chan-
nel. Hereby, x-axis shows the SNR (in dB) of the
channel 1, whereas y-axis show the additional sig-
nal attenuation A (in dB) on the channel 2. Thus,
SNR
2
= SNR
1
− A.
The results were verified by a simulaiton setup
with network simulator NS3. Figure 4b shows the
achieved PER over the considered SNR range. It can
be seeing, that for the most combinations of SNR
1
and SNR
2
, the estimations yield a reliable PER which
meets the required threshold of 10
−3
. Nevertheless,
Figure 4b still features some areas, where the PER
drops below the threshold. The reason is, that more
sophisticated channel model should be used for the
estimation in order to better fit the fading behaviour
of the channels. Nevertheless, the combination of
multi-link transmission and rateless coding may be
used in order to provide guaranteed PER, whereas the
resource usage can be flexibly tailored to channel con-
ditions.
6 CONCLUSIONS
In this paper, an Edge-cloud based industrial con-
trol functional architecture is proposed for enabling
control communication co-design. Furthermore, we
discuss applicability of AI based decision making to
adapt the control and communication system design.
We present channel condition based AGV navigation
control to avoid the coverage blindspots and adapt
the tracks in real-time. Moreover we adapt the com-
munication system by performing the channel cod-
ing across RAT based on link quality. Furthermore,
AI based channel state predictions can be utilised by
communication control. Utilising multi-RAT system
in conjunction with rateless coding, it is possible to
tailor the coding rate as well as the distribution of the
sub-codewords to different links to the expected chan-
nel quality, or SNR. By doing so, the required relia-
bility of a communication link could be guaranteed.
In future, the coding rate adaptation algorithm
needs to be improved in order to provide better re-
liability of the communication links. Further, it is
also possible to enhance this algorithm with machine
learning techniques in order to provide more precise
results based on the AGV position. Besides, further
investigations on the overall reliability of the commu-
nication as well as the impact of the forecast time are
required.
ACKNOWLEDGEMENTS
This work has been supported by the Federal Min-
istry for Economic Affairs and Climate Action of the
ETCIIM 2022 - International Workshop on Emerging Trends and Case-Studies in Industry 4.0 and Intelligent Manufacturing
312

Federal Republic of Germany (Foerderkennzeichen,
01MT19006A, AIRPoRT). The authors alone are re-
sponsible for the content of the paper.
REFERENCES
Aktas, I., Bentkus, A., Bonanati, F., Dekorsy, A., Dom-
browski, C., Doubrava, M., Golestani, A., Hofmann,
F., Heidrich, M., Hiensch, S., Kays, R., Meyer, M.,
M
¨
uller, A., Brink, S. t., Petreska, N., Popovic, M.,
Ruchhaupt, L., Saad, A., Schotten, H., W
¨
oste, C., and
Wolff, I. (2017). Funktechnologien f
¨
ur Industrie 4.0.
VDE-Positionspapier. VDE, Frankfurt a. M.
Berger, C. R., Zhou, S., Wen, Y., Willett, P., and Pattipati, K.
(2008). Optimizing joint erasure-and error-correction
coding for wireless packet transmissions. IEEE Trans-
actions on Wireless Communications, 7(11):4586–
4595.
Ehrig, M., Petri, M., Sark, V., Tesfay, A. G., Melnyk, S.,
Schotten, H., Anwar, W., Franchi, N., Fettweis, G.,
and Marchenko, N. (2017). Reliable wireless commu-
nication and positioning enabling mobile control and
safety applications in industrial environments. In 2017
IEEE International Conference on Industrial Technol-
ogy (ICIT), pages 1301–1306. IEEE.
Kavraki, L., Svestka, P., Latombe, J.-C., and Overmars, M.
(1996). Probabilistic roadmaps for path planning in
high-dimensional configuration spaces. IEEE Trans-
actions on Robotics and Automation, 12(4):566–580.
Paasch, C. and Bonaventure, O. (2014). Multipath tcp.
Communications of the ACM, 57(4):51–57.
Tayade, S., Rost, P., Maeder, A., and Schotten, H. D.
(2020). Impact of short blocklength coding on sta-
bility of an agv control system in industry 4.0. In
2020 IEEE International Conference on Communica-
tions Workshops (ICC Workshops), pages 1–6.
Wireless Industrial Communication and Control System: AI Assisted Blind Spot Detection-and-Avoidance for AGVs
313
