
Design of Electrical Sensors and Instruments on
Fire Extinguishing Robots
Hendi Purnata
a
, Sugeng Dwi Riyanto
b
, Muhamad Yusuf
c
and Saepul Rahmat
d
Department of Electronics Engineering, State Polytechnic of Cilacap, Indonesia
Keywords: Sensors, Uvtron, IMU, Robots, Fire Extinguishing.
Abstract: Development technology in the digital era is developing very rapidly and provides many benefit various aspect
not except in the field robotics. Robots are tool mechanic as well as electronics that can To do Duty physical
made with intelligence artificial for make it easy profession human. The Indonesian Robot Contest (KRI) is
event competition design build and engineering in field robotics. The Indonesian SAR Robot Contest
(KRSRI) is one of the KRI transformation divisions from KRPAI which emphasizes mission on search and
rescue disaster every fire year there is change competition rules but permanent maintain existence mission
blackout fire. With existence change that, then required sensor and instrumentation design electricity for the
Fire Extinguishing Robots for maximizing blackout fire or targets that have been set. Destination study this
for designing electronic systems in the form of sensors and instrumentation used in the Fire Extinguishing
Robots. Design this use microcontroller in the form of Arduino Nano, Arduino Mega, and STM32 which
work process using Ultrasonic sensors, TPA64, UVTRON, IMU GY-25 and Proximity. Blackout fire
conducted when the UVTRON sensor detects existence fire and TPA64 sensors found point fire, then the data
will processed by Arduino Nano which Arduino Nano sends signal to servo for open CO2 valve and spray
CO2 so that fire dead. System electricity used already in accordance with the target you want achieved that is
extinguish fire. Robots can walk with good seen that the UVTron sensor at a distance of 5 - 150 cm the sensor
can detect. Tested distance TPA64 sensor from 10 – 60 cm and the angle by -30° to 30°. At a distance of 10
cm visible temperature reading 50
o
C so read existence fire and more far distance so the more shrink read
temperature.
1 INTRODUCTION
Development technology in the digital era is
developing very rapidly and provides many benefit
various aspect not except in the field robotics. Robots
are tool mechanic as well as electronics that can To
do Duty physical mad with intelligence artificial for
make it easy profession human. The Indonesian
Robot Contest (KRI) is event competition design
build and engineering in field robotics (Kurnia et al.,
2019). The divisions contained in the KRI are the
Indonesian Fire Robot Contest, the Indonesian Search
and Rescue Robot Contest, the Indonesian Wheeled
Football Robot Contest, KRSBI Humanoid, the
Indonesian Dance Robot Contest, and the Thematic
a
https://orcid.org/0000-0003-2047-816X
b
https://orcid.org/0000-0002-1582-9597
c
https://orcid.org/0000-0002-8241-1000
d
https://orcid.org/0000-0002-8241-1000
Robot Contest Indonesia. The Indonesian SAR Robot
Contest is transformation from KRPAI which
emphasizes mission on search and rescue disaster
frequent fires happened in Indonesia. On every year
competition rules always changed but permanent
maintain existence mission blackout fire, because that
need existence design changes to the KRSRI robot for
maximizing blackout fire with more fast (Rifai et al.,
2021).
Robot problems are very complex, some study
based on maximizing robotic motion at Fire
Extinguishing Robots or also utilizing sensor
instruments and devices electronic set (Mutolib et al.,
2020). On research the movement of the autonomous
robot adjusts from the function of the robot, such as
the KRSRI robot, is a fire robot that moves and
Purnata, H., Riyanto, S., Yusuf, M. and Rahmat, S.
Design of Electrical Sensors and Instruments on Fire Extinguishing Robots.
DOI: 10.5220/0011709300003575
In Proceedings of the 5th International Conference on Applied Science and Technology on Engineering Science (iCAST-ES 2022), pages 5-10
ISBN: 978-989-758-619-4; ISSN: 2975-8246
Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
5

detects fire. Accuracy in controlling this robot is very
important so that it can become useful rescue robots
(Fuad et al., 2020; Sang et al., 2021). Research
(Adriansyah et al., 2019; Iqbal & Aji, 2021)
Developing a wall-following robot using PID
algorithm with MATLAB help. Study this stages next
after designing the Fire Extinguishing Robots.
Stages for planning system robotics that is
planning, then knowing system that will developed
and stages final that is give system control. Research
(Rout et al., 2019; Su et al., 2019, 2021) system model
in robotics defined on the system developed
electronics and mechanics. Research (Agustinah et
al., 2010; Pambudi et al., 2019; Sahal et al., 2019;
Widanis et al., 2020) linear model resurrected system
no in accordance with state actually because system
robotics is very complex and requires a linearity
process that looks for eigenvalues that really truly
stable. design system is very important for can give
system control on the robot then research (Juang et
al., 2018) design with use appropriate instruments and
algorithms on wall-following robots.
Designed robots study this is a firefighting robot
fire. For can adjust the system from the rules and can
designing with good so need changes to the robot
design and electricity made To use support blackout
fire as well as make it easy in troubleshooting robots
and summarizing the previous wiring messy.
Summary electrical wiring this could make it easy
robot movement for more flexible. Besides Changes
to electricity were also made changes to the
microcontroller, the microcontroller used namely
Arduino Mega, Arduino Nano, and STM32. Because
there is change microcontroller so need conducted the
application of the sensors used in the Fire
Extinguishing robot with microcontroller new. With
existence change this it is hoped that the robot can
more fast in find and extinguish fire with movement
flexible and effective.
2 RESEARCH METHODS
For reach destination from study this need it some
stages method carried out. Method first determine the
system flow shown in the block diagram of input
process up to system outside. With know the block
diagram of the input to output system, then
explanation component from block diagram and
continued with system flowcharts and for reach
destination this. Method final for can reach
destination this that is with the electrical system on
this Fire Extinguishing Robots. Block diagram can
seen in figure 1 below this.
Figure 1: Block Diagram.
Table 1: Proposed System.
Input Process Output
Design Sensors
and Instruments
for Extinguishing
Robots Fire
Sensors : Extinguishi
ng Robot
Sensor and
Instrument
System Fire
ultrasonic
TPA64
UVTron
Flame
MPU6050
TCS3200
Microcontroller
ESP32
STM32
Actuator
Servo
DC Moto
r
Rela
y
How it works of this robot i.e. Ultrasonic, TPA64,
and UVTRON sensors are read by ESP32 Slave then
the sensor reading sent to ESP32 Master. MPU6050
and TCS3200 sensors are read by STM32 then sent to
ESP32 Master. The pushbutton and flame sensor are
read by the ESP32 master. After all sensors are
received by the ESP32 master, the ESP32 Master will
display sensor data on LCD then accumulate for
determine the output in the form of point fire and for
leg movement. If result accumulation gives output in
the form of spraying water, the ESP32 Master will
send signal to the relay so that the relay turns on. After
the relay is on, the DC motor turns on and sprays
water. Components Used in the robot:
Microcontroller. On research this use 3 types
microcontroller namely STM32F4, Arduino uno and
Arduino nano. Arduino Mega 2560 is board
development based microcontroller Arduino with
using the ATmega2560 chip. On the fire, Arduino
mega used as a slave that processes data from the
sensor. Arduino Nano is module based ATmega328
microcontroller in form a small, complete, easy series
mounted on breadboard. On the fire robot Arduino
nano is used as a slave that processes data from servo
on gripper.
Sensor. Some of the sensors used in research this
namely TPA64 sensor, UVTron sensor, Ultrasonic
Sensor, IMU sensor and Proximity Sensor. The
TPA64 sensor uses a core sensor, namely AMG8833.
Process
Input
Output
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
6
AMG8833 8x8 Infrared Thermal Temperature Sensor
Array is an infrared temperature sensor that has level
precision tall based state-of-the- art MEMS
technology. On this robot the TPA64 sensor works for
look for point fire with could determine point x, point
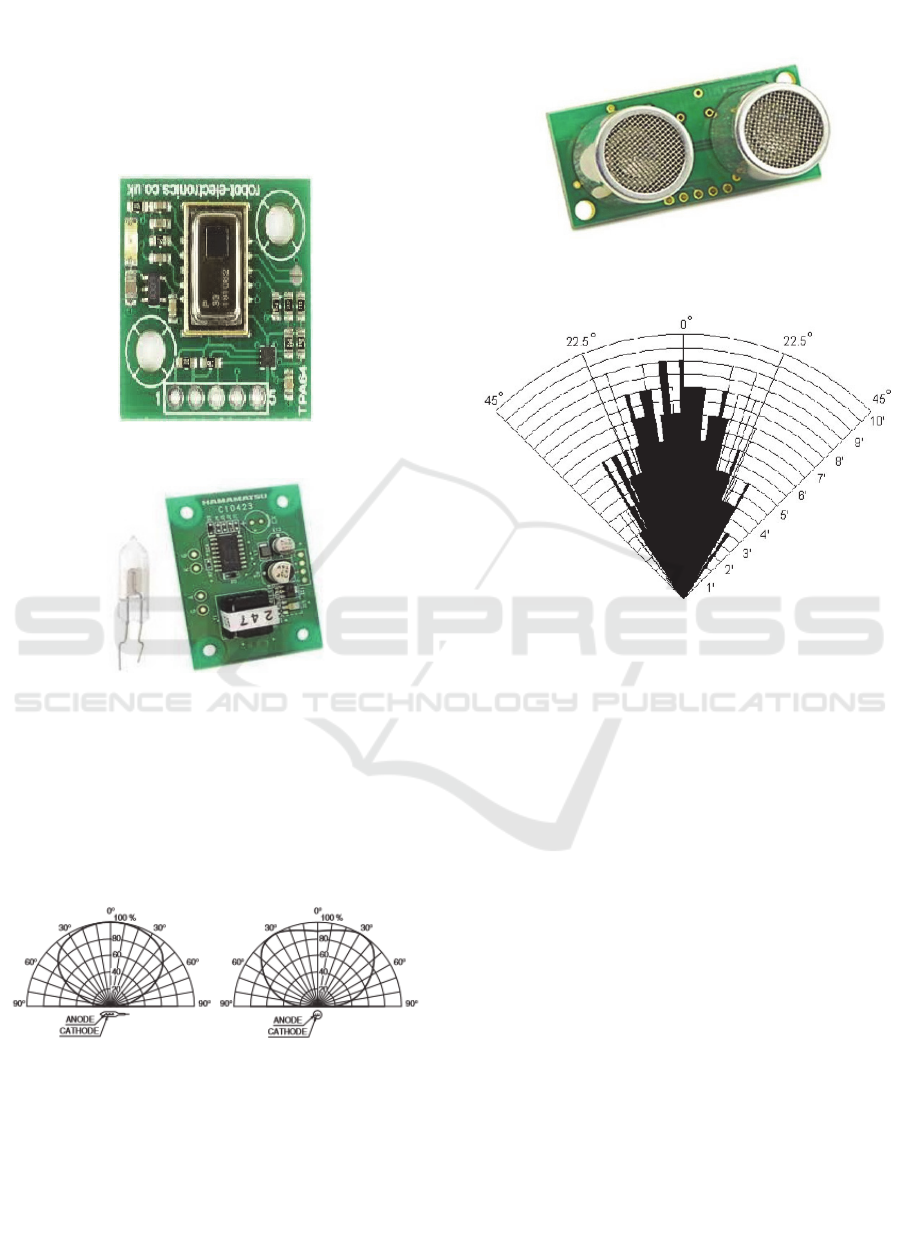
y, and point z fire against robots. Figure 2. Below is
TPA64 sensor display.
Figure 2: TPA64 sensor.
Figure 3: UVTron sensor.
Hamamatsu UVTron Flame Detector can detect
fire in 5 meters distance. This sensor used as tool for
detection source flames operating at a spectral length
of 185 nm to 160 nm. On the fire robot fire, UVtron
sensor working as detector ultraviolet lighton fire so
that could extinguished by robots. Figure 3. Is display
on UVTron sensor.
Figure 4: UVTron sensor range.
Ultrasonic sensor is a working sensor for change
quantity physical (sound) becomes quantity
electricity and vice versa. This sensor working for
knowing distance wall so that the robot can avoid
object that.
On the SRF04 sensor has range corner not enough
from 45 degree but optimal angle of reading is at
angle not enough of 15 degrees. Following is Figure
6 SRF04 sensor range:
Figure 5: Ultrasonic Sensor.
Figure 6: Ultrasonic sensor range.
The IMU GY 25 sensor is censor the balance in it
there are accelero sensors (acceleration), gyroscope,
and compass fire, GY 25 IMU sensor is used as
balancer motion robot path to stay straight.
The proximity sensor is a proximity sensor that
uses sensitive element to light (infrared) for detect
object. On the fire robot fire, this sensor used for
detect distance the wall on the sound damper obstacle
because no allow using ultrasonic sensors.
Robots will always move the place because the
work of the robot that runs, therefore that required
supply portable power or can moved anywhere. On
this robot use Li-Po battery because small size, large
voltage and current in accordance with needs system
electricity to robots. Li-Po battery used in this robot
is Li -Po 3 sell batteries, namely with 3 x 3.7v or
11.1v capacity.
Servo, Sensor and STM32 use voltage work of
5vdc. supply the power available by the Li-Po battery
is have voltage 11.1v, therefore that required reducer
voltage.
First thing in blackout fire is check, whether there
is fire or no, for detect existence fire so using UVtron
sensor and tpa64 sensor. UVtron sensor could detect
point fire small like fire on candles with range up to 2
meters. However, the UVtron sensor no could detect
Design of Electrical Sensors and Instruments on Fire Extinguishing Robots
7
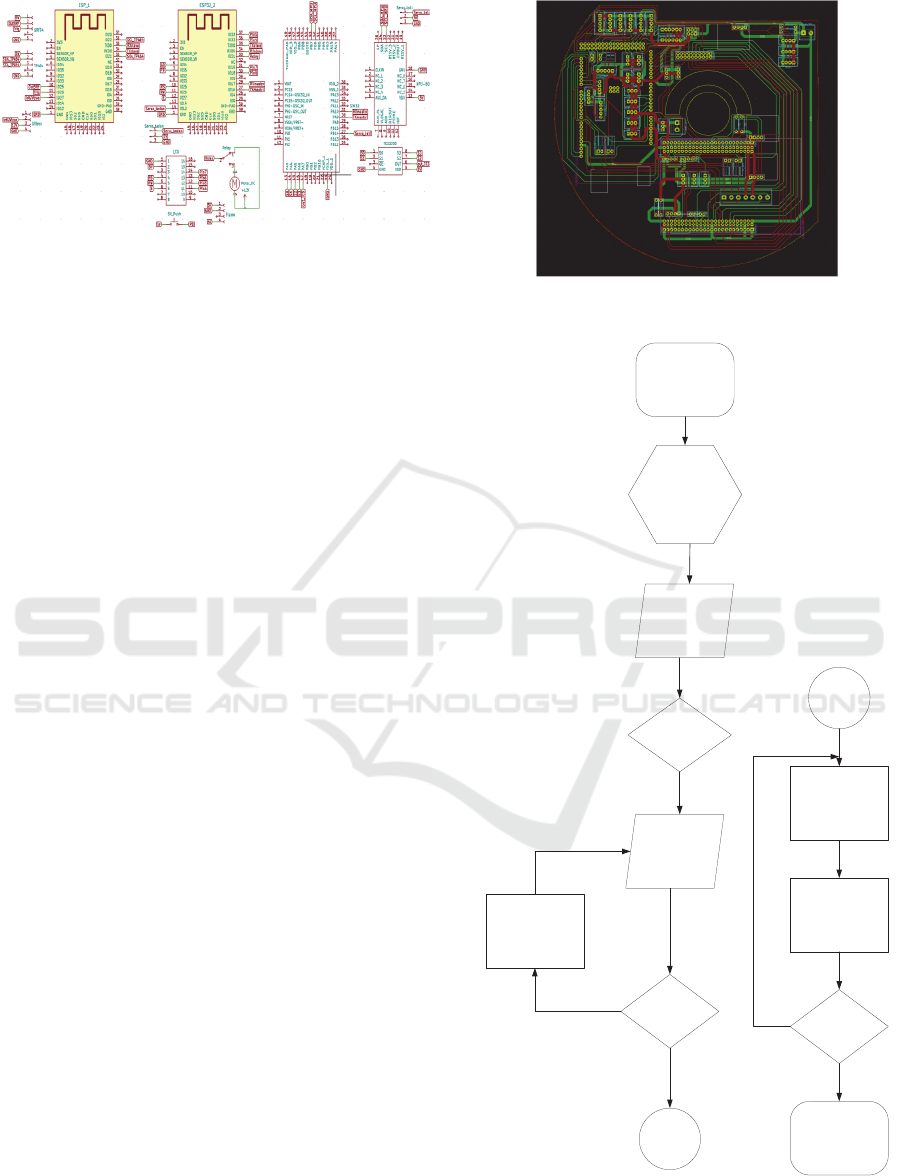
Figure 7: Design electrical sensor and microcontroller on
the Fire Extinguishing Robots.
where location fire. For detect location fire , then
robot Fire Extinguishing Robots using the tpa64
sensor. The tpa64 sensor has view by 60 degrees on
the x- axis and 60 degrees on the y- axis. Reach corner
from the sensor shared Becomes 8x8 matrix. That is
8 points to y- axis, and 8 points to x axis. With matrix
the so obtained that each point have range 7.5 degree
angle.
After knowing location fire, then the robot will
shift to front location point fire. If the robot has is at
appropriate in front of position fire, then the robot
will check more formerly is distance between robot
and fire already close. Checking the with using
ultrasonic sensor or with infrared or with temperature
the fire that has been detected. Use algorithm the use
OR gate, so that if one condition fulfilled, then the
robot will spraying CO2 that has been facing fire. For
avoid robot stuck or Keep going To do blackout fire
by Keep going continuously because no extinguished
fire, then if the robot has To do spraying CO2 3 times,
then the robot will carry on to Duty next that is save
the victim. And for avoiding the stuck robot, also
done existence calculation time, if the robot up to 30
seconds no could extinguish fire, then the robot will
carry on to Duty next too.
Figure 8. Above is a firefighting robot system
flowchart Working fire with method that is after the
robot is turned on then the robot will initialize
sensors. Then the sensor data will be checked by the
ESP32 microcontroller, if UVTRON detects Fire,
then then the flame sensor will detect point fire in 360
degrees. Then the robot will turn toward point fire. If
the robot has facing, then TPA64 with more accuracy
tall detect point fire based on score x, y, and z. After
finding point, then the robot will adapt return point
fire so that appropriate facing fire. If you have
appropriate facing fire, then pump will light up then
extinguish fire.
Figure 8: Flowchart System.
Figure 9: Layout of the Fire Extinguishing Robots.
START
STOP
Inisialisation
Reading All
sensors
does UVTRON detect
fire?
Sensor
TPA64
detection
robot looking
for hotspots
fire found
A
A
robot looking
for hotspots
robot spraying
liquid co2
did the fire go
out?
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
8

3 RESULTS AND DISCUSSION
Testing from multiple sensors so that it can determine
possible goals _ achieved . Figure 9 below this is
appearance merging Among microcontroller and
some sensors.
For can get results from electricity so conducted
testing of the sensors used in the robot. Test first with
knowing how much UVtron sensor remote could
detect fire on candle
Table 2: UVTron Sensor Test.
No Distan
ce
(cm)
Amount
test
Success failure
1. 5 5 5 0
2. 50 5 5 0
3. 100 5 5 0
4. 150 5 5 0
5. 200 5 4 1
6. 250 5 2 3
In table 2 above seen that with 5 trials and known
different distance then at a distance of 5 - 150 cm the
sensor can detect and not has a trial error but moment
a distance of 200 cm has an error 1 time and a distance
of 250 cm gets an error 3 times compared to 5 times
or an error of 60% on the experiment with 250cm
distance.
Test next namely the working TPA64 sensor for
knowing how much remote TPA64 sensor can detect
point fire, and for knowing how much precision fire
could detected with coordinate 8x8 matrix.
Table 3: TPA64 . Sensor Testing.
N
o Dis
t
ance
(cm)
Corner
Fire
Point
X
Temperatu
re (
o
C )
1. 10 0 0 50
2. 20 -15 -2 43
3. 30 -30 -4 38
4. 40 15 2 32
5. 50 30 3 29
6. 60 15 0 28
In table 3 above showing that tested distance _
from 10 – 60 cm and the angle by -30° to 30°. Reading
from the sensor if intensity temperature around 28
o
C
- 32
o
C so no read existence fire because read at
temperature normal room. At a distance of 10 cm
visible temperature reading 50
o
C so read existence
fire and more far distance so the more shrink read
temperature.
Test final that is with testing blackout Fire for
knowing all systems that have designed. Collected
data for know the system is running with breed with
knowing distance, angle fire, robot movement and
spraying . Table 3 below this show the data obtained
of the proposed system.
Table 4: Robot movement and spraying data.
N
o Distan
ce (cm)
Corner
Fire
Robot
Movemen
t
Sprayin
g
1. 10 0 Stop Spray
2. 20 -15 Swipe
Lef
t
N
o
t
3. 30 0 Sliding
Ri
g
h
t
Spray
4. 40 15 Up
N
o
t
5. 50 30 Turn
N
o
t
6. 60 15 Turn
N
o
t
Table 4 above showing that for can spray ensure
corner spraying. Robot movement is also known from
distance and angle fire, when distance is known to be
40 cm and has angle 15
o
then the robot moves Up or
customize with angle on the robot so that the robot
moves with method play rbody robots. For can spray
so robot algorithm adjust with possible distance and
angle set that is with angle 0° then can spray CO2 to
fire or extinguish fire.
4 CONCLUSION
Fire Extinguishing Robots robot is a robot that has
destination for extinguish fire. On this robot use
various kinds of sensors for To do blackout fire.
blackout fire with use CO2 liquid assisted with a
number of sensor and actuator components. Robots
can walk with good seen that the UVTron sensor at a
distance of 5 - 150 cm the sensor can detect and not
have errors. While the distance TPA64 sensor tested
from 10 – 60 cm and the angle by -30° to 30°. At a
distance of 10 cm visible temperature reading 50
o
C
so read existence fire and more far distance so the
more shrink read temperature. Whereas results from
whole for blackout fire seen from developed
algorithm that at an angle of 0 degrees so spraying
new CO2 liquid can sprayed.
Design of Electrical Sensors and Instruments on Fire Extinguishing Robots
9

ACKNOWLEDGEMENTS
The author acknowledgements State Polytechnic of
Cilacap for supporting the author’s internal research
with the DIPA funding. The author thanks colleagues
who support and assist research directly.
REFERENCES
Adriansyah, A., Suwoyo, H., Tian, Y., & Deng, C. (2019).
Improving wall-following robot performance using
PID-PSO controller. Jurnal Teknologi, 81(3), 119–126.
https://doi.org/10.11113/jt.v81.13098
Agustinah, T., Jazidie, A., Nuh, M., & Du, H. (2010). Fuzzy
tracking control design using observer-based stabilizing
compensator for nonlinear systems. 2010 International
Conference on System Science and Engineering, 275–
280. https://doi.org/10.1109/ICSSE.2010.5551718
Fuad, M., Agustinah, T., Purwanto, D., Sardjono, T. A., &
Dikairono, R. (2020). Robot Orientation Estimation
Based on Single-Frame of Fish-eye Image. Journal of
Physics: Conference Series, 1569(2).
https://doi.org/10.1088/1742-6596/1569/2/022092
Iqbal, M. H., & Aji, W. S. (2021). Wall Following Control
System with PID Control and Ultrasonic Sensor for
KRAI 2018 Robot. International Journal of Robotics
and Control Systems, 1(1), 1–14.
https://doi.org/10.31763/ijrcs.v1i1.206
Juang, C.-F., Jhan, Y.-H., Chen, Y.-M., & Hsu, C.-M.
(2018). Evolutionary Wall-Following Hexapod Robot
Using Advanced Multiobjective Continuous Ant
Colony Optimized Fuzzy Controller. IEEE
Transactions on Cognitive and Developmental Systems,
10(3), 585–594.
https://doi.org/10.1109/TCDS.2017.2681181
Kurnia, D., Mardiati, R., Ridlo Effendi, M., Eko Setiawan,
A., Elektro, T., dan Teknologi, S., & Sunan Gunung
Djati Bandung, U. (2019). Rancang Bangun Robot
Pemadam Api Menggunakan Kontrol Bluetooth dan
Virtual Reality Design and Implementation of Fire
Extinguisher Robot Using Bluetooth Control and
Virtual Reality. TELKA, 5(2), 139–146.
Mutolib, A., Mardiati, R., Mulyana, E., Setiawan, A. E., &
Fathonih, A. (2020). Design of Automatic Goods
Carrier Robot System Based on Line Sensor and Fuzzy
Logic Control Mamdani. 2020 6th International
Conference on Wireless and Telematics (ICWT), 1–4.
https://doi.org/10.1109/ICWT50448.2020.9243629
Pambudi, A. D., Agustinah, T., & Effendi, R. (2019).
Reinforcement Point and Fuzzy Input Design of Fuzzy
Q-Learning for Mobile Robot Navigation System. 2019
International Conference of Artificial Intelligence and
Information Technology (ICAIIT), 186–191.
https://doi.org/10.1109/ICAIIT.2019.8834601
Rifai, R., Bachtiar, M. M., & Wibowo, I. K. (2021). Vision-
Based Positioning Estimation on the ERSOW Robot
Soccer by Utilizing Unique Landmarks in the Field
with a Computational Process using GPU. 2021
International Electronics Symposium (IES), 227–232.
https://doi.org/10.1109/IES53407.2021.9593985
Rout, A., Deepak, B. B. V. L., & Biswal, B. B. (2019).
Advances in weld seam tracking techniques for robotic
welding: A review. Robotics and Computer-Integrated
Manufacturing, 56, 12–37.
https://doi.org/https://doi.org/10.1016/j.rcim.2018.08.0
03
Sahal, M., Agustinah, T., & Jazidie, A. (2019). Switching
Formation and Topology in Cooperative Multi-Agent
Source Seeking Using Gradient Estimation. 2019
International Conference of Artificial Intelligence and
Information Technology (ICAIIT), 151–156.
https://doi.org/10.1109/ICAIIT.2019.8834525
Sang, A. W. Y., Moo, C. G., Samarakoon, S. M. B. P.,
Muthugala, M. A. V. J., & Elara, M. R. (2021). Design
of a reconfigurable wall disinfection robot. Sensors,
21(18). https://doi.org/10.3390/s21186096
Su, H., Mariani, A., Ovur, S. E., Menciassi, A., Ferrigno,
G., & de Momi, E. (2021). Toward Teaching by
Demonstration for Robot-Assisted Minimally Invasive
Surgery. IEEE Transactions on Automation Science
and Engineering, 18(2), 484–494.
https://doi.org/10.1109/TASE.2020.3045655
Su, H., Yang, C., Ferrigno, G., & de Momi, E. (2019).
Improved Human–Robot Collaborative Control of
Redundant Robot for Teleoperated Minimally Invasive
Surgery. IEEE Robotics and Automation Letters, 4(2),
1447–1453.
https://doi.org/10.1109/LRA.2019.2897145
Widanis, A. P., Agustinah, T., & Santoso, A. (2020).
Trajectory Tracking of Multi-Robot System Using a
Singularity Approach. 2020 International Seminar on
Intelligent Technology and Its Applications (ISITIA),
266–272.
https://doi.org/10.1109/ISITIA49792.2020.9163681
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
10
