
Sorting System Based on Color Using Line Follower Robot
Zaenurrohman
a
, Supriyono
b
, Arif Sumardiono
c
and Erna Alimudin
d
Department of Electronics Engineering, Polytechnic State of Cilacap, Jl. Dr. Soetomo No. 1 Cilacap, Indonesia
Keywords: Robot, Sorting System, Line Follower, Conveyor, Color Sensor, Proximity Sensor.
Abstract: Robot is a mechanical device that can perform tasks to ease human work, both in supervision and control.
The robot is programmed with artificial intelligence in accordance with the conditions of each process of
working on its task. Robots are used by humans to do heavy, dangerous, repetitive and dirty work. Another
use is to lift or move goods without having to use human power. In this study, a color sorting system was
created which aims to make it easier to carry objects and sort colour. In terms of transporting objects, a line
follower robot is used which will automatically deliver the objects to the conveyor. after arriving at the
conveyor the goods will be sorted based on the color of the goods. The line follower robot based on the test
results can bring each item to the conveyor with an average time of 14.20 seconds and return to its original
place in 32.30 seconds. On the conveyor the TCS 3200 color sensor can read the color of the goods according
to the input data from the TCS 3200 sensor. The colors of the goods used in the test are red, green and blue.
After the color of the goods is detected, the servo will automatically sort the goods according to the color in
each prepared container.
1 INTRODUCTION
Industrial needs in terms of machines always increase
every year along with increasing industrial
performance in Indonesia. (Herlambang, Purba, &
Jaqin, 2021) Today's modern technology, especially
in the world of robot technology, has experienced
very rapid development. Robot technology in
Indonesia is not only mechanical sophistication but
also in its control system that uses computerization.
(Budiharto, Irwansyah, Suroso, & Gunawan, 2020)
Robots are also defined as having artificial
intelligence that can overcome problems to replace
humans when working in hazardous areas, repetitive
work, and dirty. (Nahavandi, 2019) The manufacture
of robots with special features is closely related to the
modern industrial world which demands a tool that
has high capabilities that can complete human work.
(Chen, 2017) Goods delivery robots to lift heavy
goods are also very necessary in industry, usually to
automatically transport goods to aircraft cargo.
a
https://orcid.org/0000-0003-0560-0729
b
https://orcid.org/0000-0001-6347-7680
c
https://orcid.org/0000-0003-4700-0895
d
https://orcid.org/0000-0002-3788-0676
(Karabegović, Karabegović, Mahmić, & Husak,
2015)
A mobile robot is a robot that uses propulsion in
the form of legs or wheels that can move from one
point to another. (Lauria et al., 2006)Mobile robots
can be applied in several applications, one of which
is grouping goods and object followers. (Larasati,
Dewi, & Oktarina, 2017) To overcome this problem,
research was conducted on the incorporation of
delivery robots using line followers and conveyors to
detect and separate types of goods based on color.
2 METHODS
The design of the system was made before creating
the robot. It was made to ensure that the system can
run properly and in accordance with its function. The
design of the system includes the design of hardware
and software. Figure 1 is a line follower robot system
using a close loop system. This robot uses a servo as
a gripper which is used to move goods.
188
Zaenurrohman, ., Supriyono, ., Sumardiono, A. and Alimudin, E.
Sorting System Based on Color Using Line Follower Robot.
DOI: 10.5220/0011739300003575
In Proceedings of the 5th International Conference on Applied Science and Technology on Engineering Science (iCAST-ES 2022), pages 188-193
ISBN: 978-989-758-619-4; ISSN: 2975-8246
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
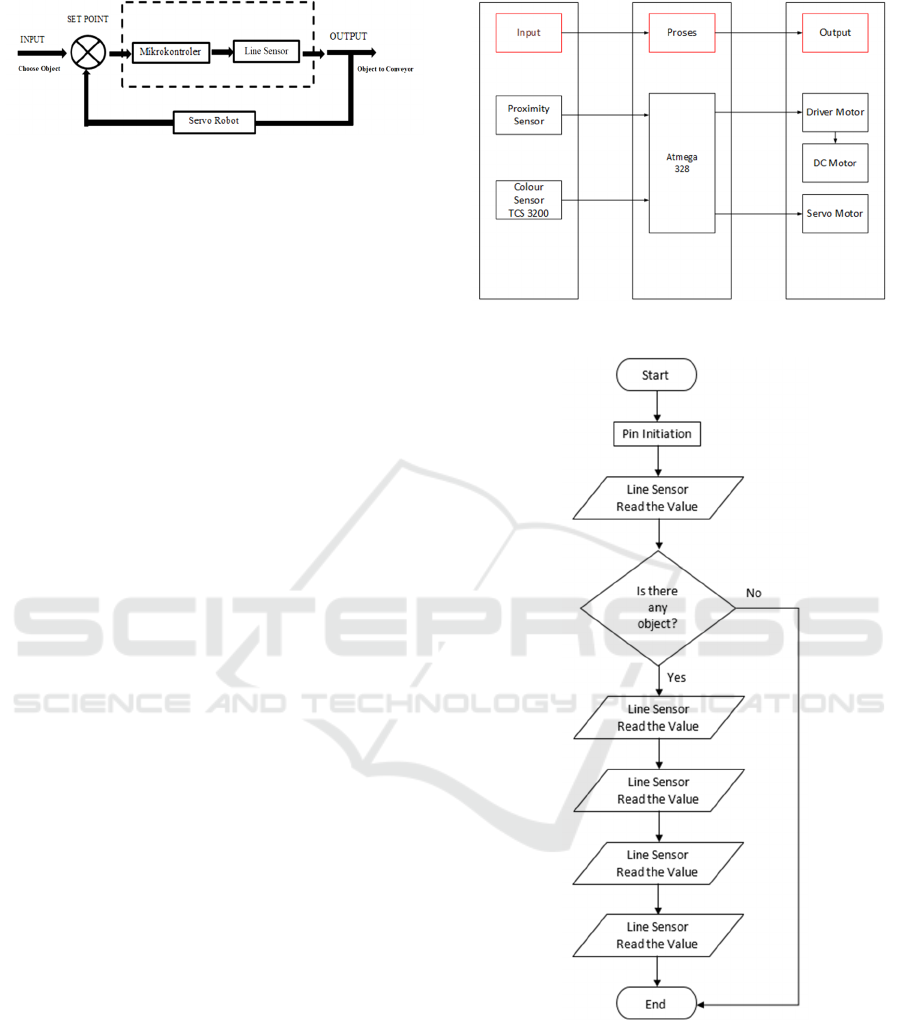
Figure 1: Block diagram of line follower robot.
Figure 1 is a line follower robot system using a close
loop system. The use of line sensors using infrared
will follow the line in delivering goods. Infrared is
placed on the front right and front left side of the
robot. It aims to have an inverse relationship between
the resistance of the infrared sensor. On a white
surface the amount of light refracted by the IR sensor
is very high and its resistance increases when the
robot follows a line on a black line. (Tayal, Rao,
Bhardwaj, & Aggarwal, 2020) Each surface has the
ability to reflect light differently. White has the ability
to reflect lighter. On the other hand, dark colors have
the ability to reflect less light. (Latif, Widodo, Rahim,
& Kunal, 2020).
Line followers use 3 IR sensors on the robot to
make it more accurate. the sensor that is being placed
on the black line, when turning to the left, the sensor
on the left side will be on the black line so the motor
on the left will stop. The right motor will keep moving
so the robot will turn right so that it will return to the
right track. (Geetha, Salvi, Saini, Yadav, & Singh
Tomar, 2021) The workflow of the motor system can
be seen in Figure 2.
This system using several sensors, i.e. photodiode
sensor and infrared sensor. The photodiode sensor is
used to detect the line, thus it can be delivered
according to the path while the infrared sensor is used
in the gripper to detect the presence of objects on the
gripper. So that, when there is an object the gripper
opens and at a certain distance the gripper will close.
Flowchart of the line follower robot for carry
goods is shown in Figure 3. There are two sensors
used in the conveyor block diagram menu, namely the
Proximity sensor and the TCS 3200 sensor. The
proximity sensor detects objects while the TCS 3200
detects the color of the goods. The TC3200 sensor has
the main components, namely a photodiode and a
current-to-frequency converter. The photodiode on
the TCS3200 IC is arranged in an x 8 arrangement
which can later be arranged through the S2 and S3
sectors. Photodiode will emit a current of magnitude
proportional to the level of the basic color of the light.
Figure 2: Block diagram of line follower robot system.
Figure 3: Flowchart of the line follower robot for
carrygoods.
The current is then converted into a square signal
with a frequency proportional to the magnitude of the
current. (Riskiawan, Rizaldi, Setyohadi, & Leksono,
2017) In the block diagram of the conveyor there are
two sensors used, namely the Proximity sensor and
the TCS 3200 sensor. The proximity sensor will
detect objects while the TCS 3200 will detect the
Sorting System Based on Color Using Line Follower Robot
189
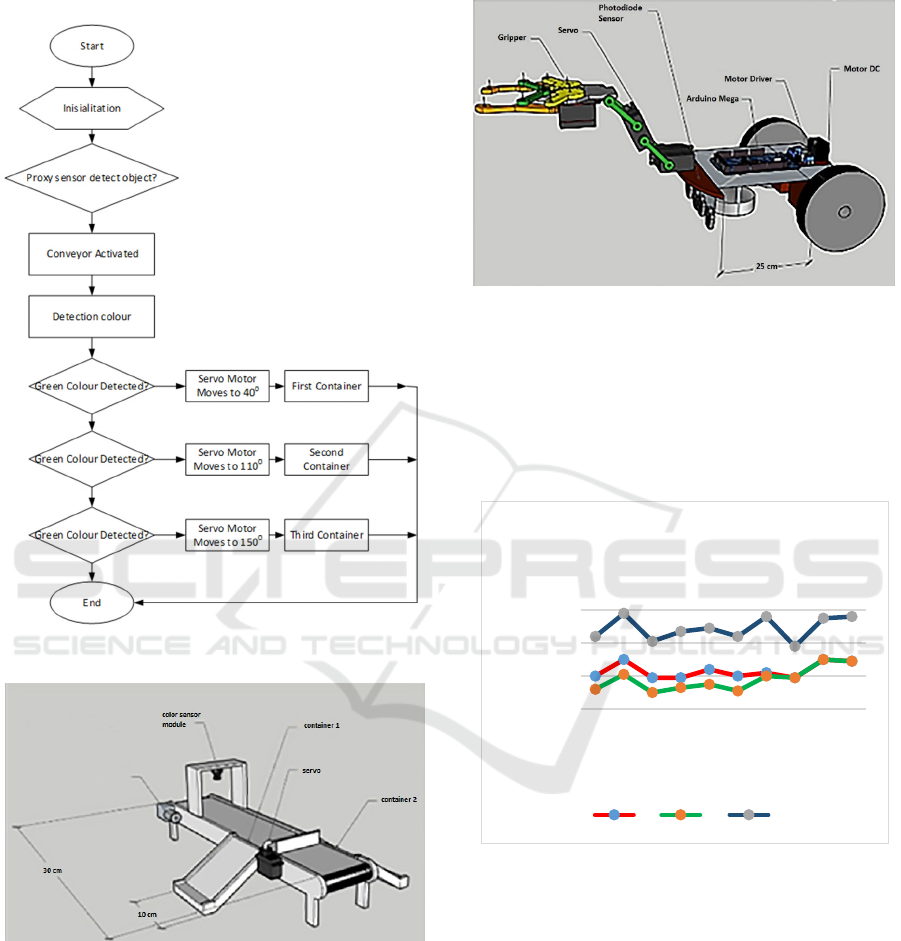
color of the goods. Flowchart of the carrier conveyor
is shown in Figure 4 and the mechanical design is
shown in Figure 5.
Figure 4: Flowchart of the Carrier conveyor.
Figure 5: Conveyor mechanical design.
Some materials in the conveyor used are acrylic,
PVC pipe, one DC motor, and one servo motor. The
roller on the conveyor uses PVC pipe, as well as a
servo motor to bring goods to a shelf or container
from the sorting results. On the line follower robot
there are two servos that are used for manipulators
that are applied to the robot. At the wheel using a dc
motor and at the front there are four photodiode
sensors. Mechanical Mechanical design of delivery
robot can be seen in Figure 6.
Figure 6: Mechanical design of delivery robot.
3 RESULTS AND DISCUSSION
The TCS 3200 sensor is very sensitive to light, thus
needed a mechanic that can control the light, which
made the light intensity value does not change.
Figure 7: Value of green object detection.
When the goods pass through the TCS 3200
sensor then the resistance value will be read. And
also, when resistance value according to a certain
color, the servo will move and place the goods
according to the color. The results of testing the color
sensor of the goods are as shown in Figure 7, Figure
8, and Figure 9.
40
60
80
100
12345678910
Color Value
Testing Number
Value of Green Object
Detection
R G B
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
190
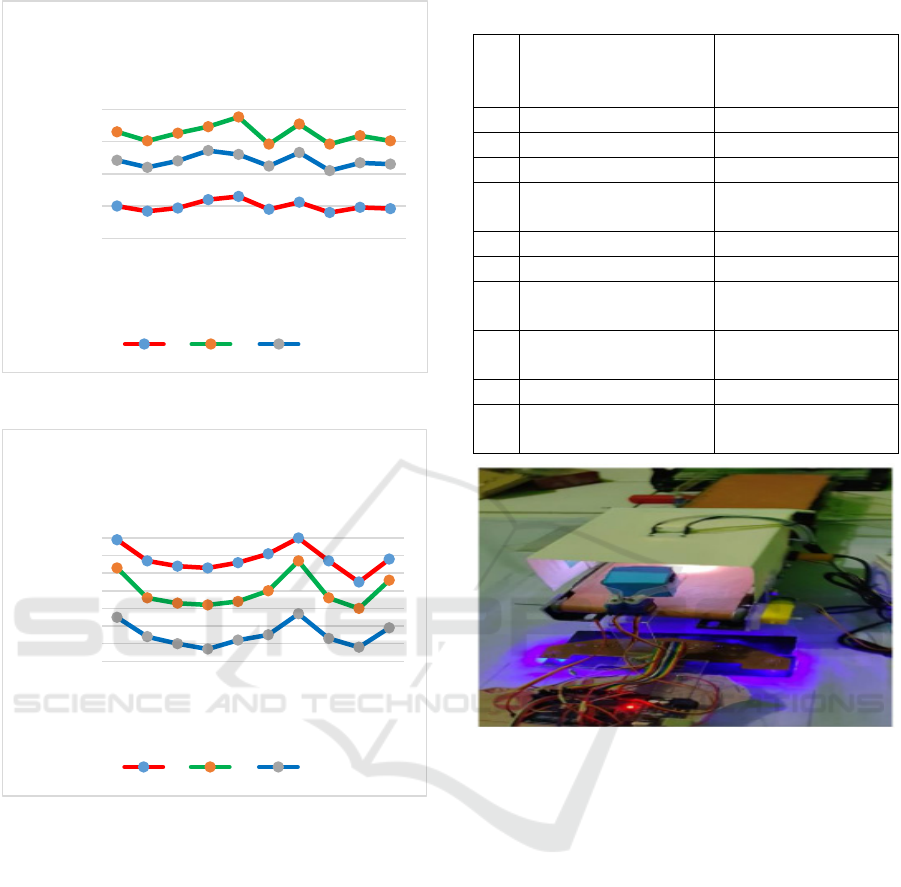
Figure 8: Value of red object detection.
Figure 9: Value of blue object detection.
The R, G., B color detection data on the object to be
moved is used as a reference for servo control in
separating goods according to their color.
3.1 Time Testing of Line Follower
Robot Bringing Goods to Conveyor
Tests are carried out to determine the time needed in
sending goods to conveyors for sorting. In the
experiment a good average time to get is 14.20
seconds. The results are shown in Table 1 and Figure
10.
Table 1: Estimated time used toward conveyor.
No
Estimated time used
toward conveyor
(second)
Description
1 13.98 Robot Walking Stable
2 14.48 Robot Walking Stable
3 14.33 Robot Walking Stable
4 16.90
Robot Walking
Unstable
5 15.78 Robot Walking Stable
6 15.57 Robot Walking Stable
7 16.83
Robot Walking
Unstable
8 17.54
Robot Walking
Unstable
9 13.95 Robot Walking Stable
10 19.62
Robot Walking
Unstable
Figure 10: Robot delivering goods to conveyor.
In the test, there were four times the robot was
running in an unstable state when the line follower
robot followed the line. It was because there is a
change in the intensity of light that changes and there
is a net that bends sharply so the speed of the robot
needs to adjust.
3.2 Conveyor Test with TCS 3200
Sensor and Servo Motor
Testing the rotational position of the servo motor
needs to be done to get the right angle so that it can
move according to the position of the shelf which will
be the position of the goods according to color. The
result is shown in Table 2.
0
50
100
150
200
12345678910
Color Value
Testing Number
Value of Red Object
Detection
R G B
30
40
50
60
70
80
90
100
12345678910
Color Value
Testing Number
Value of Blue Object
Detection
R G B
Sorting System Based on Color Using Line Follower Robot
191

Table 2: Servo Motor Position Testing.
No Servo Motor
Position
Position in Mechanical
1 180
0
Towards the Container 3
2 160
0
Unable towards the Container 3
3 140
0
Unable towards the Container 2
4 120
0
Unable towards the Container 2
5 110
0
Towards the Container 2
6 100
0
Interrupted towards the Container 2
7 80
0
Unable towards the Container 2
8 60
0
Unable towards the Container 1
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
192

Table 2: Servo Motor Position Testing. (cont.)
9 40
0
Towards the Container 1
Based on the test results in Table 2, conclude that
the appropriate servo position so that the goods can go
every receptacle prepared without any obstructions are
position 40 degree for the first container, position 110
degree for the second container and position 180
degree for the third container.
3.3 Test Sort Items by Color
Table 3 showt test sort items by color. There are errors
in the red color sorting twice and the green color 2
times while the blue color is 100% running well.
Table 3: Testing of Color Sorting Results.
No Red Green Blue
Towards
Well
Towards
Well
Towards
Well
Yes No Yes No Yes No
1 √ √ √
2 √ √ √
3 √ √ √
4 √ √ √
5 √ √ √
6 √ √ √
7 √ √ √
8 √ √ √
9 √ √ √
10 √ √ √
4 CONCLUSION
The results of this study found that the delivery of
goods using a line follower robot still has interference
from the interference of changes in light intensity.
The use of a line follower robot should only be done
in a room with a fixed light intensity. The winding
road can also slow down the time for the line follower
robot to deliver goods. In the delivery goods the
fastest time obtained is 14.20 seconds. In the sorting
goods the system can work well, the goods that are
sorted can be placed accordingly.
REFERENCES
Budiharto, W., Irwansyah, E., Suroso, J. S., & Gunawan, A.
A. S. (2020). Design of object tracking for military
robot using PID controller and computer vision. ICIC
Express Letters, 14(3), 289–294.
Chen, Y. (2017). Integrated and intelligent manufacturing:
perspectives and enablers. Engineering, 3(5), 588–595.
Geetha, V., Salvi, S., Saini, G., Yadav, N., & Singh Tomar,
R. P. (2021). Follow me: A human following robot
using wi-fi received signal strength indicator. In ICT
Systems and Sustainability (pp. 585–593). Springer.
Herlambang, H., Purba, H. H., & Jaqin, C. (2021).
Development of machine vision to increase the level of
automation in indonesia electronic component industry.
Journal Europeen Des Systemes Automatises, 54(2),
253–262. https://doi.org/10.18280/JESA.540207
Karabegović, I., Karabegović, E., Mahmić, M., & Husak,
E. (2015). The application of service robots for logistics
in manufacturing processes. Advances in Production
Engineering \& Management, 10(4).
Larasati, N., Dewi, T., & Oktarina, Y. (2017). Object
following design for a mobile robot using neural
network. Computer Engineering and Applications
Journal, 6(1), 5–14.
Latif, A., Widodo, H. A., Rahim, R., & Kunal, K. (2020).
Implementation of line follower robot based
microcontroller atmega32a. Journal of Robotics and
Control (JRC), 1(3), 70–74. https://doi.org/10.
18196/jrc.1316
Lauria, M., Nadeau, I., Lepage, P., Morin, Y., Giguère, P.,
Gagnon, F., … Michaud, F. (2006). Design and control
of a four steered wheeled mobile robot. In IECON
2006-32nd Annual Conference on IEEE Industrial
Electronics (pp. 4020–4025).
Nahavandi, S. (2019). Industry 5.0—A human-centric
solution. Sustainability, 11(16), 4371.
Riskiawan, H. Y., Rizaldi, T., Setyohadi, D. P. S., &
Leksono, T. (2017). Nitrogen (N) fertilizer measuring
instrument on maize-based plant microcontroller.
International Conference on Electrical Engineering,
Computer Science and Informatics (EECSI), 2017-
December(September), 19–21. https://doi.org/10.
1109/EECSI.2017.8239080
Tayal, S., Rao, H. P. G., Bhardwaj, S., & Aggarwal, H.
(2020). Line follower robot: design and hardware
application. In 2020 8th International Conference on
Reliability, Infocom Technologies and Optimization
(Trends and Future Directions)(ICRITO) (pp. 10–13).
Sorting System Based on Color Using Line Follower Robot
193
