
Emotiv EEG Classification System to
Determine the Motor Speed of a Wheelchair
Agus Siswoyo
a
and Ignatius Deradjad Pranowo
b
Mekatronika, Fakultas Vokasi Universitas Sanata Dharma, Yogyakarta, Indonesia
Keywords: BCI, Classification, EEG, Emotiv, Fuzzy Logic.
Abstract: This paper describes the use of the 14-channel Emotiv as a low-cost method of acquiring raw EEG signals,
for human-machine interfaces as a possible aid for persons with disabilities. To demonstrate the feasibility of
using raw EEG signals obtained using the Emotiv system, a classification algorithm based on Fuzzy logic is
implemented as an example. The proposed algorithm has been found to be effective in detecting and
classifying brain signals which can then be translated into valid commands for the human-machine interface.
The performance of the proposed approach is studied using fuzzy logic. The results obtained indicate a high
level of classification accuracy, therefore, indicating that the Emotiv EPOC can be used as a valid tool for
research.
1 INTRODUCTION
The research presented here is a continuation of
research that has been carried out using a type of
neurosky mindset sensor which is a Brain Computer
Interface (BCI) (Siswoyo, Arief, & Sulistijono,
2015). The BCI refer to a type of system that
combines electroencephalographic (EEG) activity
measurement technology with computational
development to convert brain activity into real
applications. The EEG sensor type Emotiv 14-
channel, which has a difference in the number of
points on the electrodes, is used in this study. This
study maps study data by application (BCI, signal
processing, experimental research, and validation)
and location of signal use.
The interest in BCI has mainly focused on medical
applications (Mahajan & Bansal, 2017); (Saifuddin
Saif, Ryhan Hossain, Ahmed, & Chowdhury, 2019);
(Cincotti et al., 2008). However, due to the increasing
desire of scientists and engineers to develop new
technologies, it is now also possible to find BCI in
applications such as video games, vehicle
manipulation, and psychological research. Related
work explaining how BCI can be used to control
drones to help people with disabilities can be found
a
https://orcid.org/0000-0002-4853-2191
b
https://orcid.org/0000-0002-0869-1761
in (Marin, Al-Battbootti, & Goga, 2020); (Abiyev,
Akkaya, Aytac, Günsel, & Çaǧman, 2016). A review
paper (Alotaiby, El-Samie, Alshebeili, & Ahmad,
2015), discussed some EEG channel selection
techniques for different applications taking into
consideration the different criteria developed in the
literature for channel selection evaluation. Of course,
there are many possibilities for BCI-EEG
applications (Banach, Małecki, Rosół, & Broniec,
2021); (Megalingam, Thulasi, & Krishna, 2013).
The classification of EEG signals is of significant
importance in BCI systems. Aiming to achieve
intelligent classification of EEG, a classification
methodology using sparse representation and fast
compression residual convolutional neural networks
is proposed (Huang, Li, Chen, Lin, & Yao, 2020).
This study propose an EEG classification system of
rule-based Emotiv Epoc signal output to identify
signals for moving wheelchair speeds. Therefore, we
believe that applying the Emotiv Epoc signal
classification to wheelchair speed movements, has
better results than the signals obtained from the
neurosky mindset.
Siswoyo, A. and Pranowo, I.
Emotiv EEG Classification System to Determine the Motor Speed of a Wheelchair.
DOI: 10.5220/0011815300003575
In Proceedings of the 5th International Conference on Applied Science and Technology on Engineering Science (iCAST-ES 2022), pages 483-487
ISBN: 978-989-758-619-4; ISSN: 2975-8246
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
483
2 MATERIALS AND METHODS
2.1 EEG Data Recording
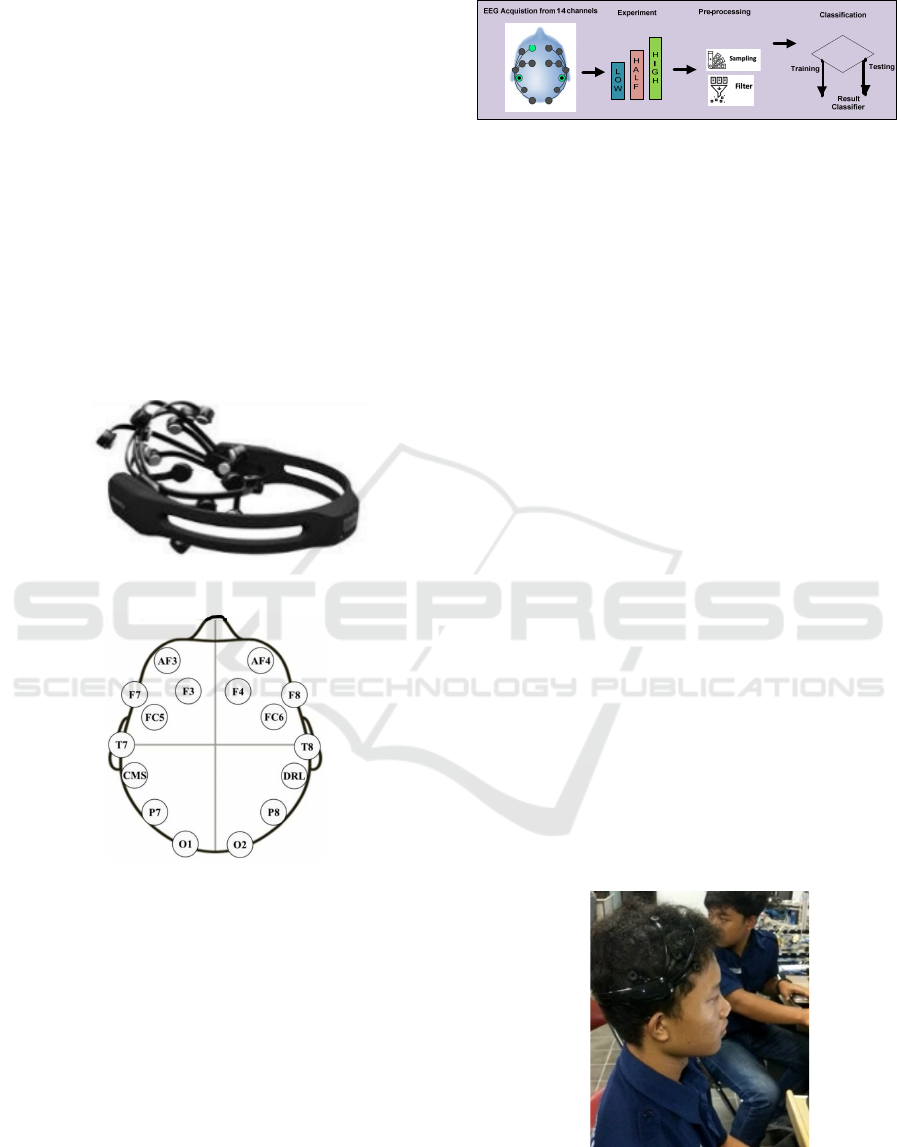
The raw EEG data were obtained from the 14-channel
electrode EEG data record of Emotiv Epoc (Figure 1).
The EEG is recorded when the test user thinks about
certain mental commands by imagining the
movement of objects. The test subject must be
focused, relaxed, and not have many distracting
movements when performing mental commands. The
experiment uses the "Mental Command Suite" to help
test subjects perform mental commands that allow
test subjects to control the movement of a 3-
dimensional cube using their minds. The 3D cube can
move up, down, left and right according to the mind
of the test subject.
Figure 1: Emotiv Epoc 14 channel.
Figure 2: Location of 14 Emotiv electrode channels.
2.2 Test Procedure and Environment
The use of the sensor is first given a saline solution
on the foam which is located at each electrode (Figure
2). Then do a check using the built-in software for the
connectivity of the electrodes with the location on the
scalp. When ready, a red colour will appear on the
indicator in the default software application.
2.3 EEG Data Analyses
All Emotiv 14 channel EEG data files were processed
and analyzed with MATLAB software (The
Mathworks, Inc.).
Figure 3: Experiment and data analysis.
EEG data preprocessing gets input from reading
the EEG signal which then forwards it to data
classification as shown in Figure 3 (Alabboudi,
Majed, Hassan, & Nassif, 2020). The processed raw
EEG data files are first labelled for each trial as
number "1" representing "slow wheelchair speed
trial" then number "2" representing "moderate
wheelchair speed trial" and number "3" represents "a
fast wheelchair speed trial"
The experimental results of this study continue
processing on the filtered data. EEG signal has weak
time-frequency-spatial characteristics, non-
stationary, non-linear, and weak intensity, so to
extract adaptive features reflecting frequency and
spatial characteristics, it is very important to adopt
feature extraction method. For this study, we
converted the time domain EEG data into the
frequency domain of the segments converted into
their respective frequency domains.
3 CLASSIFICATION MODELS
3.1 Classification Models and Metrics
When trying to collect signal data from Emotiv, data
will be displayed on the Emotiv default application.
There are 14 brain signal outputs, namely signals,
AF3, F7, F3, FC5, T7, P7, O1, O2, P8, T8, FC6, F4,
F8, and AF4.
Figure 4: Run setup during data acquisition.
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
484

The subjects were asked to sit and comfortable
armchair with their upper limbs placed on the
armrests of the armchair (Figure 4). The EEG signal
Emotiv Epoc device was placed in each subject, some
of the technical descriptions include a sampling
frequency of 128 Hz, this device has 14 electrodes
and two ground references, and then data distributed
to the computer as shown in the Figure 5.
Figure 5: Emotiv Epoc output.
Figure 6: Signal F8, Frontal.
From the experimental results users, observing the
output of 14 signals, the F8 signal gives a significant
response when wheelchair users think to increase
speed (Figure 6).
Figure 7: Signal AF3, Frontal.
Then the AF3 signal sometimes appears to have a
significant spike in response at certain times of the
user (Figure 7).
The data totalling 14 channels is sent to
MATLAB, and then the data will be processed to
MATLAB (Figure 8).
Figure 8: Data output Emotiv in Matlab.
Classification of brain signals using fuzzy logic
(Siswoyo, Arief, & Sulistijono, 2017). From the
results of the Emotiv signal reading data, then the
signal data will be fuzzy. The research methodology
uses Fuzzy Logic Controller in this study Fuzzy used
the mamdani method, the input will be processed to
get the F8 value from the user, and this value is used
as a reference.
A complete fuzzy system consists of three main
components, namely:
1) Fuzzification
Fuzzification is a process of mapping input values
(crisp input) from a controlled system (non-fuzzy
quantities) into fuzzy sets according to their
membership functions from the emotive sensor itself.
To change the crisp input to fuzzy input, you must
first determine the membership function for each
crisp input, then the fuzzification process will take the
crisp input and compare it with the existing
membership function to generate fuzzy input values.
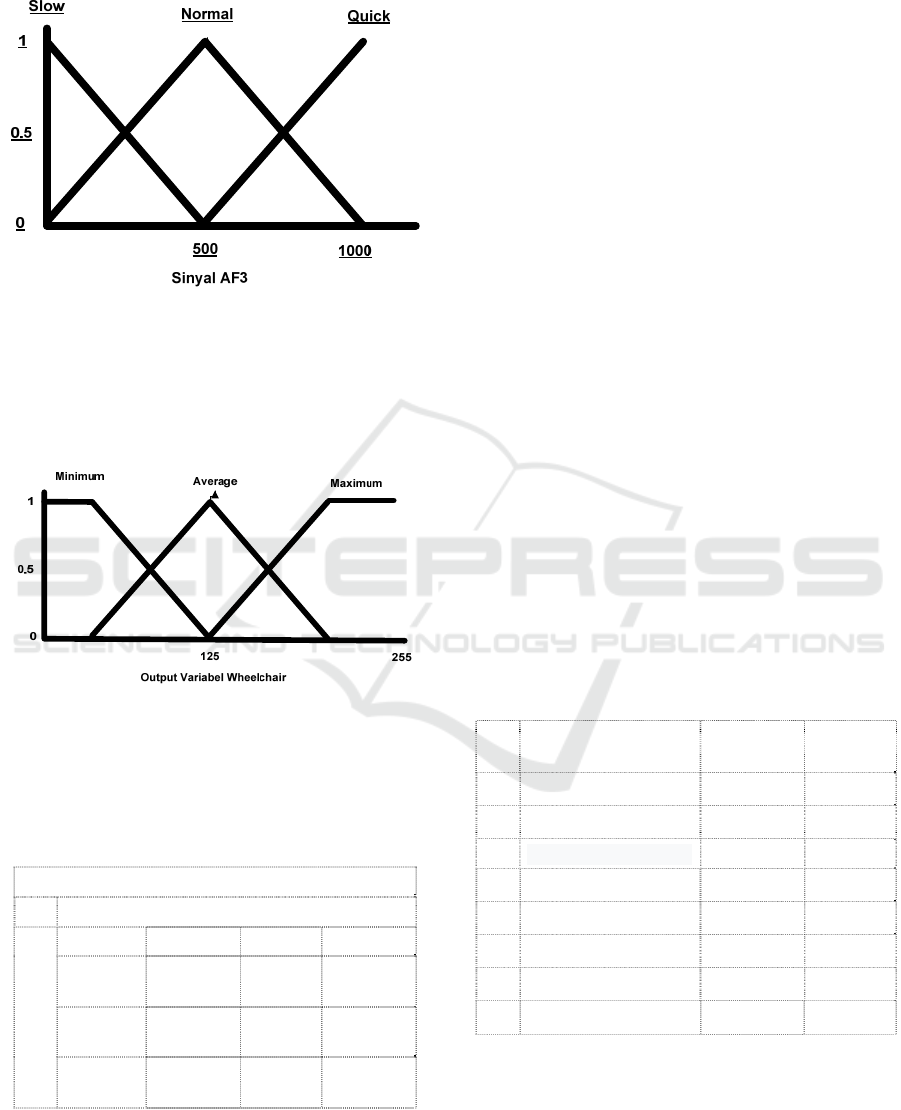
Figure 9: Membership fuzzy input Signal F8.
The F8 signal size indicates the level of focus. The
value ranges from 0 to 1000 (Figure 9). The level of
Emotiv EEG Classification System to Determine the Motor Speed of a Wheelchair
485
mind focus increases when the user focuses his/her
mind.
Figure 10: Membership fuzzy input Signal AF3.
The size of the AF3 signal indicates the level of
focus. The values range from 0 to 1000 (Figure 10).
The level of focus increases when the user focuses
his/her mind. Figure 11 shows a variable output with
a range from 0 to 255.
Figure 11: Membership fuzzy wheelchair.
2) Design Rule Base
Here is the design rule of fuzzy logic that we can use
as shown in Table 1.
Table 1: Design rule of fuzzy logic.
Rules
F8 Signal
AF3 Signal
Low Middle High
Slow Minimum
Averag
e
Maximu
m
Normal Average
Averag
e
Average
Quick Minimum
Averag
e
Average
3) Defuzzification
From Table 1 we can get the defuzzification as:
a) If (F8 is LOW) and (AF3 is SLOW) then
(SpeedMotor is MINIMUM)
b) If (F8 is LOW) and (AF3 is NORMAL) then
(SpeedMotor is AVERAGE)
c) If (F8 is LOW) and (AF3 is QUICK) then
(SpeedMotor is MINIMUM)
d) If (F8 is MIDDLE) and (AF3 is SLOW) then
(SpeedMotor is AVERAGE)
e) If (F8 is MIDDLE) and (AF3 is NORMAL) then
(SpeedMotor is AVERAGE)
f) If (F8 is MIDDLE) and (AF3 is QUICK) then
(SpeedMotor is AVERAGE)
g) If (F8 is HIGH) and (AF3 is SLOW) then
(SpeedMotor is MAXIMUM)
h) If (F8 is HIGH) and (AF3 is NORMAL) then
(SpeedMotor is AVERAGE)
i) If (F8 is HIGH) and (AF3 is QUICK) then
(SpeedMotor is AVERAGE)
Nine rules were created for the system controller
to make up the rule base. The use of this fuzzy logic
method will follow a trial and error model.
4 CONCLUSIONS
Table 2 summarizes the selection criteria for the type
of EEG sensor for comparative analysis. Selection
criteria including the accuracy, sampling rate, ease of
use, number of channel, software application used,
communication method, learnability, and
performances.
Table 2: EEG Sensor type comparison.
No Compare
Neurosky
Mindset
Emotiv
Epoc
1 Accuracy Moderate High
2 Sampling rate 512Hz 128 Hz
3 Ease of use Easy Easy
4 Signal input channel 4 14
5 Software application Open Licence
6 Communication Bluetooth Wireless
7 Learnability Moderate Easy
8 Performance Moderate High
New users of Emotiv Epoc can gain control over
a single action fairly quickly. Learning to control
multiple actions usually takes practice and becomes
increasingly difficult as additional actions are added.
The user learns to train a reproducible mental state for
each action; detection becomes more and more
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
486

precise. Most users usually achieve their best results
after practicing each action several times. Practice
and experience will help determine the ideal amount
of training required for each individual user to
successfully control wheelchair speed.
In this research, a two input from signal Emotiv
Epoc sensor, one output MFIS in fuzzy tool box of
Matlab software was used for control speed
wheelchair. Grading results obtained from fuzzy logic
showed a good general agreement (91%) with the
results from the human experts, providing good
flexibility in reflecting the expert expectations and
grading standards into the results. This model
demonstrated that, control speed evaluation based on
this method is more exact than experts, and provides
a better representation control speed grading.
Another topic for future work is the effectiveness
of EEG signals used for the needs of people with
disabilities. Different users allow different responses
to the same stimulus. Ease of extracting task-relevant
EEG patterns from recordings signal.
ACKNOWLEDGEMENTS
This research was fully funded by the Academic
Directorate of Vocational Higher Education,
Directorate General of Vocational Education
Ministry of Education Culture Research and
Technology, Fiscal Year 2022 (SP DIPA-
023.18.1.690524/2022) with contract No.
127/SPK/D.D3/PPK.01.ATVP/VI/2022, and also
supported by LPPM Sanata Dharma University (No.
031 Penel./LPPM-USD/VII/2022).
REFERENCES
Abiyev, R. H., Akkaya, N., Aytac, E., Günsel, I., &
Çaǧman, A. (2016). Brain-Computer Interface for
Control of Wheelchair Using Fuzzy Neural Networks.
BioMed Research International, 2016. https://doi.org/
10.1155/2016/9359868
Alabboudi, M., Majed, M., Hassan, F., & Nassif, A. B.
(2020). EEG wheelchair for people of determination. In
2020 Advances in Science and Engineering Technology
International Conferences, ASET 2020. https://doi.
org/10.1109/ASET48392.2020.9118340
Alotaiby, T., El-Samie, F. E. A., Alshebeili, S. A., &
Ahmad, I. (2015). A review of channel selection
algorithms for EEG signal processing. Eurasip Journal
on Advances in Signal Processing, 2015(1).
https://doi.org/10.1186/s13634-015-0251-9
Banach, K., Małecki, M., Rosół, M., & Broniec, A. (2021).
Brain-computer interface for electric wheelchair based
on alpha waves of EEG signal. Bio-Algorithms and
Med-Systems, 17(3), 165–172. https://doi.org/
10.1515/bams-2021-0095
Cincotti, F., Mattia, D., Aloise, F., Bufalari, S., Schalk, G.,
Oriolo, G., … Babiloni, F. (2008). Non-invasive brain-
computer interface system: Towards its application as
assistive technology. Brain Research Bulletin, 75(6),
796–803. https://doi.org/10.1016/j.brainresbull.
2008.01.007
Huang, J. S., Li, Y., Chen, B. Q., Lin, C., & Yao, B. (2020).
An Intelligent EEG Classification Methodology Based
on Sparse Representation Enhanced Deep Learning
Networks. Frontiers in Neuroscience, 14(September),
1–8. https://doi.org/10.3389/fnins.2020.00808
Mahajan, R., & Bansal, D. (2017). Real Time EEG Based
Cognitive Brain Computer Interface for Control
Applications via Arduino Interfacing. Procedia
Computer Science, 115, 812–820. https://doi.org/
10.1016/j.procs.2017.09.158
Marin, I., Al-Battbootti, M. J. H., & Goga, N. (2020). Drone
Control based on Mental Commands and Facial
Expressions. In Proceedings of the 12th International
Conference on Electronics, Computers and Artificial
Intelligence, ECAI 2020 (pp. 1–4).
https://doi.org/10.1109/ECAI50035.2020.9223246
Megalingam, R., Thulasi, A., & Krishna, R. (2013).
Thought Controlled Wheelchair Using EEG
Acquisition Device. In 3rd International Conference on
Advancements in Electronics and Power Engineering
(ICAEPE’2013) (pp. 207–212). Retrieved from
http://psrcentre.org/images/extraimages/113543.pdf
Saifuddin Saif, A. F. M., Ryhan Hossain, M., Ahmed, R.,
& Chowdhury, T. (2019). A Review based on Brain
Computer Interaction using EEG Headset for
Physically Handicapped People. International Journal
of Education and Management Engineering, 9(2), 34–
43. https://doi.org/10.5815/ijeme.2019.02.04
Siswoyo, A., Arief, Z., & Sulistijono, I. A. (2015). A
Design of Brain Computer Interface Based Fuzzy Logic
for Control of Motor Speed. In The Fourth Indonesian-
Japanese Conference on Knowledge Creation dan
Intelligent Computing (KCIC) (p. ISBN 978-602-
72251-0-7, 2015.). Surabaya, Indonesia: Politeknik
Elektronika Negeri Surabaya.
Siswoyo, A., Arief, Z., & Sulistijono, I. A. (2017).
Application of Artificial Neural Networks in Modeling
Direction Wheelchairs Using Neurosky Mindset
Mobile (EEG) Device. EMITTER International Journal
of Engineering Technology, 5(1), 170–191.
https://doi.org/10.24003/emitter.v5i1.165.
Emotiv EEG Classification System to Determine the Motor Speed of a Wheelchair
487
