
A New Collision Avoidance System for Smart Wheelchairs Using
Deep Learning
Malik Haddad
1
, David Sanders
2
, Giles Tewkesbury
2
, Martin Langner
3
and Will Keeble
2
1
Northeastern University – London, St. Katharine’s Way, London, U.K.
2
Faculty of Technology, University of Portsmouth, Anglesea Road, Portsmouth, U.K.
3
Chailey Heritage Foundation, North Chailey, Lewes, U.K.
Keywords: Collision Avoidance, Smart Wheelchair, Steering, Deep Learning.
Abstract: The work presented describes a new collision avoidance system for smart wheelchair steering using Deep
Learning. The system used an Artificial Neural Network (ANN) and applied a Rule-based method to create
testing and training sets. Three ultrasonic sensors were used to create an array. The sensors measured distance
to the closest object to the left, right and in front of the wheelchair. Readings from the array were utilised as
inputs to the ANN. The system employed Deep Learning to avoid obstacles. The driving directions considered
were spin left, turn left, forward, spin right, turn right and stop. The new system drove the smart wheelchair
away from obstacles. The new system provided reliable results when tested and achieved 99.17% and 97.53%
training and testing accuracies respectively. The testing confirmed that the new system successfully drove a
smart wheelchair away from obstacles. The system can be overridden if required. Clinical tests will be carried
at Chailey Heritage Foundation.
1 INTRODUCTION
A new collision avoidance system for smart
wheelchairs using Deep Learning is presented. The
work is part of wider research carried out at the
University of Portsmouth and Chailey Heritage
Foundation supported by the Engineering and
Physical Sciences Council (EPSRC) (Sanders and
Gegov, 2018). The aim of the research is to apply AI
to powered mobility problems to improve movement
and enhance quality of life for users with
impairments.
The number of people diagnosed with disability
worldwide is on the rise. The type of disability is
shifting from mostly physical to a more complex mix
of physical/cognitive disabilities. New systems to
address that shift in disability are required. Smart
mobility is becoming more acceptable and useful to
support individuals with a disability (Haddad and
Sanders, 2020). Smart mobility is expected to
revolutionize the quality of life of people with
disabilities in the next two decades. Many researchers
have presented novel approaches for navigating
powered mobility (Sanders et al., 2010; Haddad and
Sanders, 2019; Haddad et al., 2019; Haddad et al.,
2020a; Haddad et al., 2020b) by creating Human
Machine Interfaces (Nguyen et al., 2013; Haddad et
al, 2020c; Haddad et al., 2020d; Haddad et al.,
2021a), intelligent collision avoidance systems and
intelligent controllers(Sanders and Stott, 2009;
Langner, 2012; Sanders et al., 2021), sensors and
sensor fusion (Larson et al., 2008; Milanes et al.,
2008; Sanders and Bausch, 2015; Sanders, 2016;
Sanders et al., 2019), Deep Learning (Haddad and
Sanders, 2020), expert systems (Sanders et al., 2018;
Sanders, 2020), and image processing (Sanders,
2009; Tewkesbury, 2021; Haddad et al., 2021b) and
they have analysed the behaviour of powered
wheelchair drivers to improve mobility (Sanders,
2009; Sanders et al., 2016; Sanders et al., 2017;
Sanders et al., 2019b; Haddad et al., 2020e; Haddad
et al., 2020f; Sanders et al., 2020b; Sanders et al.,
2020c; Sanders et al., 2021b).
This paper presents a collision avoidance system
used to safely steer smart wheelchairs away from
obstacles by employing Deep Learning. Section 2
presents the Deep Learning method. Section 3
presents the training and testing of the Deep Learning
architecture.
Section 4 presents some testing of the collision
avoidance system. Section 5 presents a discussion and
Haddad, M., Sanders, D., Tewkesbury, G., Langner, M. and Keeble, W.
A New Collision Avoidance System for Smart Wheelchairs Using Deep Learning.
DOI: 10.5220/0011903000003612
In Proceedings of the 3rd International Symposium on Automation, Information and Computing (ISAIC 2022), pages 75-79
ISBN: 978-989-758-622-4; ISSN: 2975-9463
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
75
some results. Section 6 presents conclusions and
future work.
2 THE NEW SYSTEM
A New Deep Learning architecture was created to
deliver a collision-free driving route for smart
wheelchairs. A three ultrasonic sensor array was
created. The sensors detected objects in the
wheelchair’s surroundings and calculated the
distances from to the nearest object to the right
(D
right
), in front (D
centre
), and to the left (D
left
) of the
wheelchair. The distances from the ultrasonic sensors
were considered as inputs to the Deep Learning
approach. Three inputs were considered: D
right
, D
centre
and D
left
. The new system conducted Deep Learning
and provided a safe driving direction for the smart
wheelchair based on these distances. The directions
considered were turn left, turn right, spin left, spin
right, forward and stop.
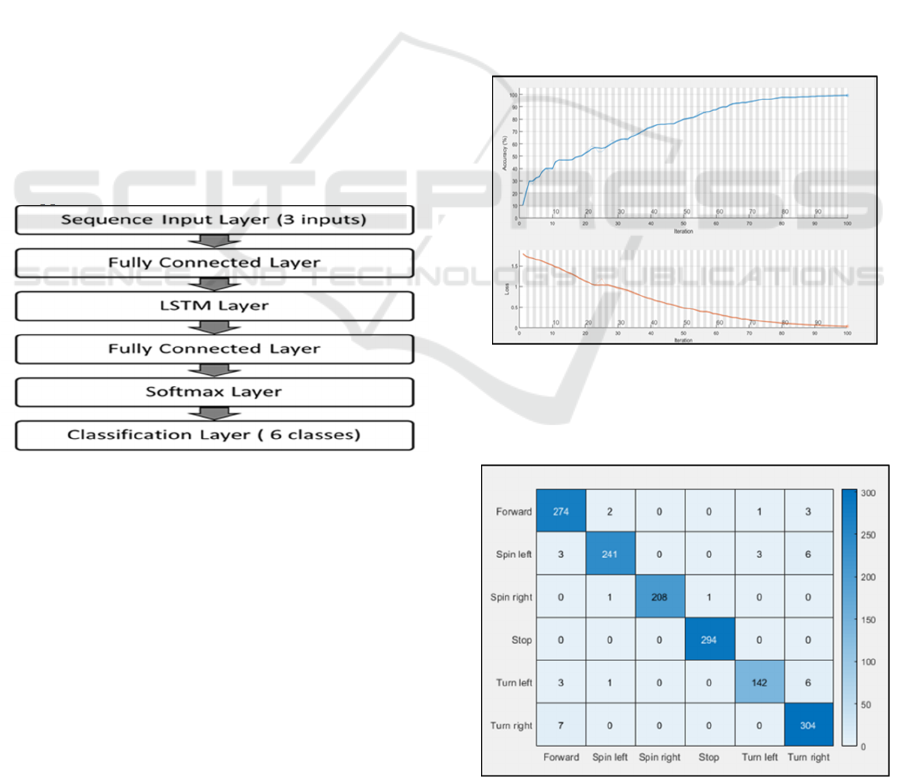
A new Artificial Neural Network (ANN) was
created and used in this paper. The structure of the
ANN is shown in figure 1.
The rule-based method was considered to create
testing and training sets for the architecture similar to
the approach used in Haddad and Sanders (2020).
Figure 1: Structure of the ANN.
The ANN consisted of six layers:
1. Input Sequence Layer (3 inputs).
2. Fully Connected Layer.
3. LSTM Layer (100 hidden nodes).
4. Fully Connected Layer.
5. Soft-Max Layer.
6. Classification Layer.
MATLAB was used to create the ANN with 3 input
units, 100 hidden units in the LSTM Layer and 6
outputs. An ADAptive Momentum algorithm
(ADAM) was considered with initial learning rate of
0.01 and 100 epochs.
3 TRAINING AND TESTING THE
DEEP LEARNING
ARCHITECTURE
MATLAB was used to train and test the Deep
Learning Architecture. A (5000x4) matrix considered
in Haddad and Sanders (2020) was used for testing
and training. The matrix was divided into a 3:7 ratio
to create testing and training sets respectively.
Figure 2 shows the training of the ANN using
0.001 as a learning rate and 100 epochs. As training
proceeded, training accuracy improved (shown as a
blue curve in the top half of figure 2). Training loss
reduced (shown as an orange curve in the bottom half
of figure 2). After completing 100 epochs, the
training accuracy increased to more than 99%. The
testing accuracy reached 97.53% when tested against
the same testing set considered in Haddad and
Sanders (2020). Figure 3 shows the confusion matrix
generated from testing the architecture against the
testing set.
Figure 2: Screenshot of training progress. Training
accuracy is shown as a blue curve (top) increasing and
training loss is shown as an orange curve (bottom)
decreasing.
Figure 3: Confusion matrix used to assess the architecture
accuracy.
ISAIC 2022 - International Symposium on Automation, Information and Computing
76
The architecture required 1 minute and 15 seconds
to finish 100 epochs with a 0.001 initial learning rate.
The training accuracy reached 99.17%. The
architecture achieved 97.53% testing accuracy.
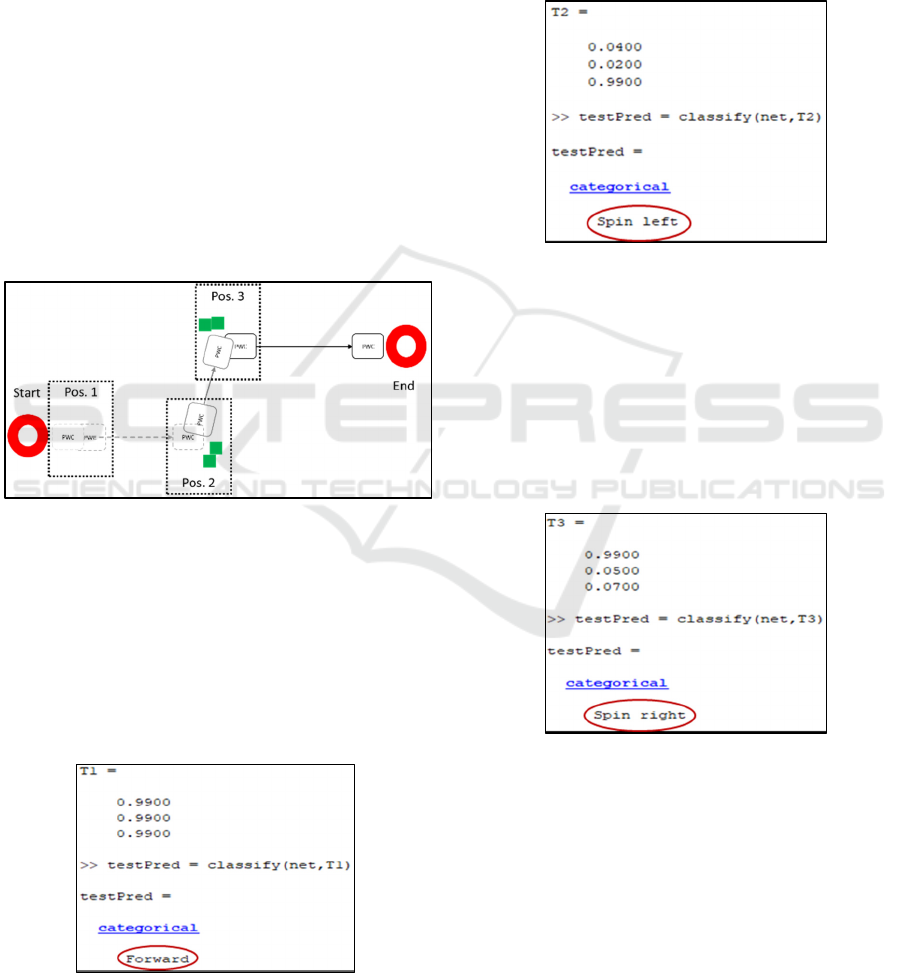
4 TESTING
The trained and tested system was used to deliver a
safe driving route for smart wheelchairs using
ultrasonic sensor array readings. Three scenarios
were examined as the wheelchair drove through an
environment with obstacles as shown in figure 4:
Scenario 1: Nothing detected (Pos. 1 in figure 4).
Scenario 2: Obstacles detected in front and to the
right (Pos. 2 in figure 4).
Scenario 3: Obstacles detected in front and to the
left (Pos. 3 in figure 4).
Six possible outcomes were considered as
possible directions for a smart wheelchair: turn left,
turn right, spin left, turn right, forward and Stop.
Figure 4: Smart wheelchair moving in an environment
containing obstacles.
4.1 Scenario 1: No Obstacles Detected
At the start of the driving session, no obstacles were
detected by the sensors as shown at Pos. 1 in figure 4.
The value of D
right
= 0.99, D
centre
= 0.99 and D
left
=
0.99.
The collision avoidance system output was
“Forward” and shown by a red oval in figure 5.
Figure 5: Output of the collision avoidance system for
Scenario 1.
4.2 Scenario 2: Obstacle Detected to
the Right and in Front
As the wheelchair drove forward obstacles were
detected in front and to the right as shown at Pos. 2 in
figure 4. The value of D
right
= 0.04, D
centre
= 0.02 and
D
left
= 0.99.
The collision avoidance system output was “spin
left” and shown by a red oval in figure 6.
Figure 6: Output of the collision avoidance system for
Scenario 2.
4.3 Scenario 3: Obstacles Detected in
Front and to the Left
As the wheelchair moved obstacles were detected in
front and to the left as shown at Pos. 3 in figure 4. The
value of D
right
= 0.99, D
centre
= 0.05 and D
left
= 0.07.
The collision avoidance system output was “spin
right” shown by a red oval in figure 7.
Figure 7: Output of the collision avoidance system for
Scenario 3.
5 DISCUSSION AND RESULTS
A new collision avoidance system for smart
wheelchairs was created using a Deep Learning
approach. Readings from a sensor array were
considered as inputs to the Deep Learning approach.
A Rule-based method similar to the Rule-based
approach used by Haddad and Sanders (2020) was
A New Collision Avoidance System for Smart Wheelchairs Using Deep Learning
77

used to create sets used to train and test a new ANN.
A 6-Layer ANN was created using MATLAB.
MATLAB platform was used to train and test the
ANN.
The new Deep Learning architecture achieved
99.17% and 97.53% training and testing accuracies
respectively when tested against the same training
and testing sets used by Haddad and Sanders (2020).
The new architecture achieved higher accuracy than
the architecture used in Haddad and Sanders (2020).
Moreover, the new architecture required 42.75% less
time to train the new ANN using the same training
set, training platform and CPU used in Haddad and
Sanders (2020).
The new collision avoidance system was tested.
Three scenarios were considered. Readings from the
sensor array were considered as inputs to the Deep
Learning architecture. The collision avoidance
system successfully drove a smart wheelchair away
from obstacles and provided a safe route.
6 CONCLUSIONS AND FUTURE
WORK
The new collision avoidance system provided
successful results when tested and it successfully
steered smart wheelchairs away from obstructions.
The ultrasonic sensor array measured the distance
from the closest object to the left, centre, and right of
the wheelchair. Sensor readings were considered as
inputs for the ANN.
The Deep Learning approach used in this paper
provided more accurate results during training and
testing than the approach presented in Haddad and
Sanders (2020). Moreover, the new system required
42.75% less time to train the ANN against the same
training set and using the same platform and CPU
used in Haddad and Sanders (2020).
The new system could continuously learn to drive
smart wheelchairs in new environments and would
introduce some independence and reduce the need for
helpers by using other computationally inexpensive
and simple Deep Learning architectures.
The user could override the new system if
required by holding a joystick or any other input
device still in position. User input was combined so
that the system could be overridden by user. If no
obstacles were detected, then the smart wheelchair
would drive as instructed by a user.
Results showed that the system provided good
results. The new system will be tested to meet safety
standards before being trialled at Chailey Heritage
foundation.
The system presented in this paper used simple
and dynamic yet effective AI algorithms for smart
wheelchair navigation and can be expected to
improve reliance and self-confidence, enhance
mobility, increase autonomy, and provide a safe route
for smart wheelchair users.
Future work will investigate general shifts in
impairment from purely physical to more complex
mixes of cognitive/physical. That will be addressed
by considering levels of functionality rather than
disability. New transducers and controllers that use
dynamic inputs rather than static or fixed inputs will
be investigated. Different AI techniques will be
investigated and combined with the new types of
controllers and transducers to interpret what users
want to do. Smart inputs that detect sounds and
dynamic movement of body parts using new
contactless transducers and/or brain activity using
EEG caps will be considered. The use of mixes of
EEG, pre-processing, Fourier transform, and wavelet
transforms will be investigated to determine user
intentions.
REFERENCES
Haddad, M., Sanders, D., 2019. Selecting a best
compromise direction for a powered wheelchair using
PROMETHEE, IEEE Trans. Neur. Sys. Rehab. 27 2
pp 228-235.
Haddad, M., Sanders, D., 2020. Deep Learning
architecture to assist with steering a powered
wheelchair, IEEE Trans. Neur. Sys. Reh. 28 12 pp
2987-2994.
Haddad, M., Sanders, D., Gegov, A., Hassan, M., Huang,
Y., Al-Mosawi, M., 2019. Combining multiple criteria
decision making with vector manipulation to decide on
the direction for a powered wheelchair. In SAI
Intelligent Systems Conference. Springer.
Haddad, M., Sanders, D., Ikwan, F., Thabet, M., Langner,
M., Gegov, A., 2020c. Intelligent HMI and control for
steering a powered wheelchair using a Raspberry Pi
microcomputer. In 2020 IEEE 10th International
Conference on Intelligent Systems-IS. IEEE.
Haddad, M., Sanders, D., Langner, M., Bausch, N.,
Thabet, M., Gegov, A., Tewkesbury, G., Ikwan, F.,
2020d. Intelligent control of the steering for a powered
wheelchair using a microcomputer. In SAI Intelligent
Systems Conference. Springer.
Haddad, M., Sanders, D., Langner, M., Ikwan, F.,
Tewkesbury, G., Gegov, A., 2020a. Steering direction
for a powered-wheelchair using the Analytical
Hierarchy Process. In 2020 IEEE 10th International
Conference on Intelligent Systems-IS. IEEE.
ISAIC 2022 - International Symposium on Automation, Information and Computing
78

Haddad, M., Sanders, D., Langner, M., Omoarebun, P.,
Thabet, M., Gegov, A., 2020e. Initial results from
using an intelligent system to analyse powered
wheelchair users’ data. In the 2020 IEEE 10th
International Conference on Intelligent Systems-IS.
IEEE.
Haddad, M., Sanders, D., Langner, M., Tewkesbury, G.,
2021b. One Shot Learning Approach to Identify
Drivers. In SAI Intelligent Systems Conference.
Springer.
Haddad, M., Sanders, D., Langner, M., Thabet, M.,
Omoarebun, P., Gegov, A., Bausch, N., Giasin, K.,
2020f. Intelligent system to analyze data about
powered wheelchair drivers. In SAI Intelligent Systems
Conference. Springer.
Haddad, M., Sanders, D., Tewkesbury, G., Langner, M.,
2021a. Intelligent User Interface to Control a Powered
Wheelchair using Infrared Sensors. In SAI Intelligent
Systems Conference. Springer.
Haddad, M., Sanders, D., Thabet, M., Gegov, A., Ikwan,
F., Omoarebun, P., Tewkesbury, G., Hassan, M.,
2020b. Use of the Analytical Hierarchy Process to
Determine the Steering Direction for a Powered
Wheelchair. In SAI Intelligent Systems Conference.
Springer.
Langner, M., 2012. Effort Reduction and Collision
Avoidance for Powered Wheelchairs: SCAD Assistive
Mobility System, Ph.D. dissertation, University of
Portsmouth.
Larsson, J., Broxvall, M., Saffiotti, A., 2008. Laser-based
corridor detection for reactive Navigation, Ind Rob:
An int' jnl 35 1 pp 69-79.
Milanes, V., Naranjo, J., Gonzalez, C., 2008. Autonomous
vehicle based in cooperative GPS and inertial systems,
Robotica, 26 pp 627-633.
Nguyen, V., et al. 2013. Strategies for Human - Machine
Interface in an Intelligent Wheelchair. In 35th Annual
Int Conf of IEEE-EMBC. IEEE.
Sanders D, Sanders D, Gegov A and Ndzi D 2017 Results
from investigating powered-wheelchair users learning
to drive with varying levels of sensor support Proc. of
SAI Intelligent System (London) pp 241-245
Sanders, D., 2009. Comparing speed to complete
progressively more difficult mobile robot paths
between human tele-operators and humans with
sensor-systems to assist, Assem. Autom. 29 3 pp 230-
248.
Sanders, D., 2010. Comparing ability to complete simple
tele-operated rescue or maintenance mobile-robot
tasks with and without a sensor system, Sensor Rev 30
1 pp 40-50.
Sanders, D., 2016. Using self-reliance factors to decide
how to share control between human powered
wheelchair drivers and ultrasonic sensors, IEEE
Trans. Neur. Sys. Rehab.25 8 pp 1221-1229.
Sanders, D., Bausch, N., 2015. Improving steering of a
powered wheelchair using an expert system to
interpret hand tremor. In
the International Conference
on Intelligent Robotics and Applications. University of
Portsmouth.
Sanders, D., Gegov, A., 2018. Using artificial intelligence
to share control of a powered-wheelchair between a
wheelchair user and an intelligent sensor system,
EPSRC Project, 2019.
Sanders, D., Gegov, A., Haddad, M., Ikwan, F., Wiltshire,
D., Tan, Y. C., 2018. A rule-based expert system to
decide on direction and speed of a powered
wheelchair. In SAI Intelligent Systems Conference.
Springer.
Sanders, D., Gegov, A., Tewkesbury, G., Khusainov, R.,
2019. Sharing driving between a vehicle driver and a
sensor system using trust-factors to set control gains.
In Adv. Intell. Syst. Comput. Springer.
Sanders, D., Haddad, M., Langner, M., Omoarebun, P.,
Chiverton, J., Hassan, M., Zhou, S., Vatchova, B.,
2020c. Introducing time-delays to analyze driver
reaction times when using a powered wheelchair. In
SAI Intelligent Systems Conference. Springer
Sanders, D., Haddad, M., Tewkesbury, G., 2021.
Intelligent control of a semi-autonomous Assistive
Vehicle. In SAI Intelligent Systems Conference.
Springer.
Sanders, D., Haddad, M., Tewkesbury, G., Bausch, N.,
Rogers, I., Huang, Y., 2020b. Analysis of reaction
times and time-delays introduced into an intelligent
HCI for a smart wheelchair. In the 2020 IEEE 10th
International Conference on Intelligent Systems-IS.
IEEE.
Sanders, D., Haddad, M., Tewkesbury, G., Gegov, A.,
Adda, M., 2021b. Are human drivers a liability or an
asset?. In SAI Intelligent Systems Conference.Springer.
Sanders, D., Haddad, M., Tewkesbury, G., Thabet, G.,
Omoarebun, P., Barker, T., 2020. Simple expert
system for intelligent control and HCI for a wheelchair
fitted with ultrasonic sensors. In the 2020 IEEE 10th
International Conference on Intelligent Systems-IS.
IEEE.
Sanders, D., Langner, M., Gegov, A., Ndzi, D., Sanders,
H., Tewkesbury, G., 2016. Tele-operator performance
and their perception of system time lags when
completing mobile robot tasks. In 9th Int Conf on
Human Systems Interaction. University of Portsmouth.
Sanders, D., Langner, M., Tewkesbury, G., 2010.
Improving wheelchair
‐
driving using a sensor system
to control wheelchair
‐
veer and variable
‐
switches
as an alternative to digital switches or joysticks, Ind
Rob: An int' jnl. 32 2 pp157-167.
Sanders, D., Stott, I., 2009. A new prototype intelligent
mobility system to assist powered-wheelchair users,
Ind Rob: An int' jnl. 26 6 pp 466-475.
Sanders, D., Tewkesbury, G., Parchizadeh, H., Robertson,
J., Omoarebun, P., Malik, M., 2019b. Learning to
drive with and without intelligent computer systems
and sensors to assist. In Adv. Intell. Syst. Comput.
Springer.
Tewkesbury, G., Lifton, S., Haddad, M., Sanders, D.,
2021. Facial recognition software for identification of
powered wheelchair users. In SAI Intelligent Systems
Conference. Springer.
A New Collision Avoidance System for Smart Wheelchairs Using Deep Learning
79
