
Computer Vision Algorithms to Drive Smart Wheelchairs
Malik Haddad
1
, David Sanders
2
, Giles Tewkesbury
2
, Martin langner
3
, Sanar Muhyaddin
4
and Mohammed Ibrahim
5
1
Northeastern University – London, St. Katharine’s Way, London, U.K.
2
Faculty of Technology, University of Portsmouth, Anglesea Road, Portsmouth, U.K.
3
Chailey Heritage Foundation, North Chailey, Lewes, U.K.
4
North Wales Business School, Wrexham Glyndwr University, Wrexham, U.K.
5
Ministry of Communications, Abo Nawas Street, Bagdad, Iraq
Keywords: Computer Vision, Powered Wheelchair, Assistive Technology.
Abstract: This paper presents a novel approach to driving smart wheelchairs using Computer Vision algorithms. When
a user makes a movement, the new approach identifies that movement and utilises it to control a smart
wheelchair. An electronic circuit is created to connect a camera, a set of relays and a microcomputer. A
programme was created using Python programming language. The program detects the movement of the user.
Three algorithms for Computer-Vision algorithms are used: Background Subtraction, Python Imaging Library
and Open Source Computer Vision (OpenCV) algorithm. The camera was pointed towards the user a body
part used for operating the smart wheelchair. The new approach will detect and identify the movement, the
programme will analyse the movement and control the smart wheelchair accordingly. Two User Interfaces
were built: a simple User Interface to control the architecture and a technical interface to adjust sensitivity,
movement detection settings and operation mode. Testing revealed that OpenCV produced the highest
sensitivity and accuracy compared to the other algorithms considered in this paper. The new approach
effectively identified voluntary movements and interpreted movements to commands used to drive a smart
wheelchair. Future clinical tests will be performed at Chailey Heritage Foundation.
1 INTRODUCTION
A novel approach for operating a smart wheelchair
using an image processing algorithm and a Raspberry
Pi is presented. The work presented is part of research
conducted by the authors at the University of
Portsmouth and Chailey Heritage Foundation funded
by the Engineering and Physical Sciences Council
(EPSRC) (Sanders and Gegov, 20180. The main aim
of the research is to apply AI techniques to powered
mobility to improve the quality of life of powered
mobility users.
Around 15% of the world’s population has been
experiencing some type of disability with 2 to 4% of
the population with disability bieng diagnosed with
major problems in mobility (Haddad and Sanders,
2020). Population ageing and the spread of chronic
disease have increased these numbers (Haddad and
Sanders, 2020; Krops et al., 2018). The type of
disability is shifting from mostly physical to a more
complex mix of physical/cognitive disabilities. New
systems, transducers and controllers are required to
address that shift. People with impairment often had
poorer quality of life than others (Bos et al., 2019).
New Smart input devices are required that use the
dynamic movement of body-parts using new
contactless transducers to consider users’ level of
functionality rather than the type of disability and
determine user intentions.
George Klein created the first powered wheelchair
in collaboration with the National Research Council
of Canada to help wounded users during the Second
World War (Frank and De Souza, 2018). Since then,
powered mobility often became a preferred option for
people with disability (Frank and De Souza, 2018).
Many researchers worked on improving navigation
and steering of powered mobility by creating new
systems. Sanders et al. (2010; 2021a) used a sensor
structure to control wheelchair-veer and enhance
driving. Many researchers used zero-forced sensing
switches to operate powered wheelchairs (Haddad et
al., 2021a). Sanders and Bausch (2015) used an expert
80
Haddad, M., Sanders, D., Tewkesbury, G., langner, M., Muhyaddin, S. and Ibrahim, M.
Computer Vision Algorithms to Drive Smart Wheelchairs.
DOI: 10.5220/0011903100003612
In Proceedings of the 3rd International Symposium on Automation, Information and Computing (ISAIC 2022), pages 80-85
ISBN: 978-989-758-622-4; ISSN: 2975-9463
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
system that analysed users’ hand tremors to improve
driving. Sanders (2016) considered self-reliance
factors to develop a system that blended control
between powered wheelchair drivers and an
intelligent ultrasonic sensor system. Haddad et al.
(2019; 2020a; 2020b) used readings from ultrasonic
sensor arrays as inputs to a Multiple Attribute
Decision Making (MADM) system and blended the
outcome from the MCDM system with desired input
from a user to deliver a collision-free steering
direction for a powered wheelchair. Haddad and
Sanders (2019) used a MADM method,
PROMETHEE II, to propose a safe path. Haddad et
al. (2020c; 2020d) utilized microcomputers to
develop intelligent Human-Machine Interfaces
(HMI) that safely steered powered wheelchairs. Many
researchers created intelligent systems to collect
drivers’ data for analysis (Haddad et al., 2020e;
Haddad et al., 2020f; Sanders et al., 2020a; Sanders
et al., 2020b; Sanders et al 2021b) and applied AI
techniques to powered mobility problems, deep
learning to safely steer a powered wheelchair
(Haddad and Sanders, 2020), rule-based systems to
deliver a safe route for powered wheelchairs (Sanders
et al., 2018), intelligent control and Human-Computer
Interfaces based on expert systems and ultrasonic
sensors (Sanders et al., 2020c, image processing
algorithms and facial recognition to identify powered
mobility drivers (Tewkesbury, 2021; Haddad et al.,
2021b) The system created aimed at enhancing the
quality of life of powered wheelchair users and
increasing their mobility.
Powered wheelchair users often produced a
voluntary movement to activate an input device used
to drive their wheelchair. Users often used a joystick
or a switch to indicate the desired direction and speed.
Examples of other input tools included foot control,
head or chin controllers or sip-tubes and lever
switches.
Discussions with Occupational Therapists (OTs),
carers and helpers at Chailey Heritage
Foundation/School showed that some students lacked
the ability to provide enough hand movement to use
a joystick or a switch and the click noise produced
from closing switches disturbed the attention of some
of the young wheelchair drivers diagnosed with a
cognitive and physical disability.
The approach presented in this paper is considered
a new way to operate a smart wheelchair using a
minimal amount of limb/thumb movement and zero
force sensing. The new approach aimed to detect
users’ hand/thumb movement and use that movement
to operate a powered wheelchair.
2 THE NEW APPROACH
The new approach used an electronic circuit and
a Python program to detect movement and
operate a powered wheelchair. The circuit
connected a camera with a Raspberry Pi and a
relay. The camera was directed to the user’s
body part responsible to generate a voluntary
movement.
The program was installed onto the
Raspberry Pi and triggered the camera to
continuously take images. Three Computer-
Vision algorithms were considered. A simple UI
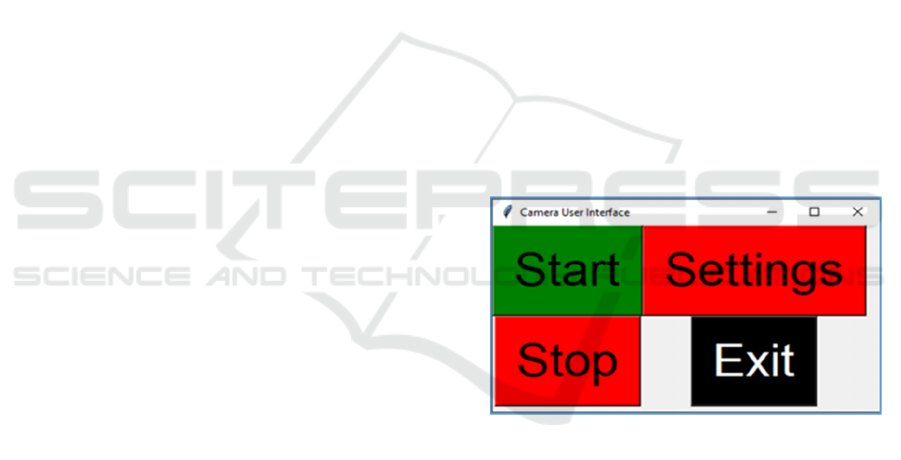
with four buttons was created to operate the new
system as shown in figure 1. The simple UI was
designed to match the level of functionality of
potential users who had an intellectual disability.
It had a straightforward operation and offered an
appropriate match between desired commands
and user abilities (Lewis, 0221).
To detect movement, the Start button shown
in figure 1 would be pressed. Due to safety
concerns, the system would not start detecting
movement until the Start button was pressed.
Figure 1: UI used to operate new approach.
2.1 Background-Subtraction Algorithm
The first algorithm considered in the new
approach was a Background-subtraction method.
The method compared consecutive image
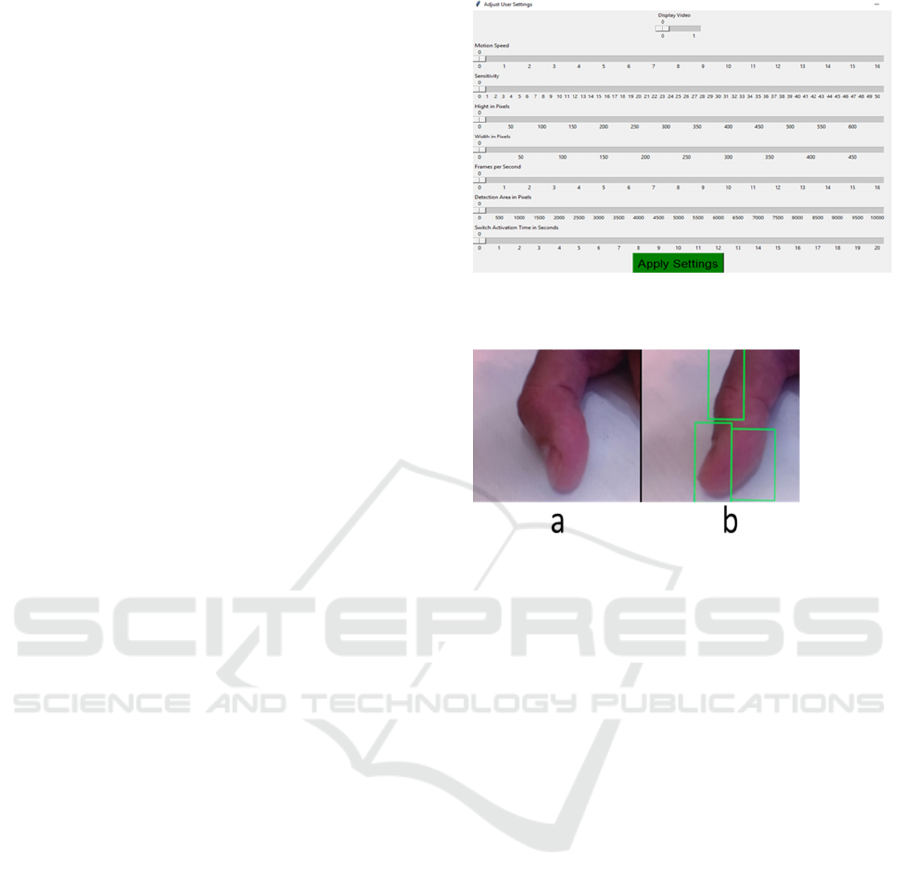
frames. A Technical Interface (TI) was created
to adjust image and movement detection settings
as shown in figure 2.
The UI had 8 track-bars used to modify the
image and movement detection settings:
Display Video: Display detected
movement on a display screen.
Motion Speed: The number of consecutive
frames containing motion.
Computer Vision Algorithms to Drive Smart Wheelchairs
81
Sensitivity: The minimum absolute
difference for a given pixel in two
consecutive frames to be identified as
changed.
Height in Pixels: Height of image in pixels.
Width in Pixels: Width of image in pixels.
Frames per Second: The number of
captured images per second.
Detection Area in Pixels: The minimum
number of adjacent changed pixels in two
consecutive frames required to be
identified as changed.
Switch Activation Time: This track-bar
allowed the new approach to function in
two different modes: Switch mode and
Time-Delay mode. Setting the Switch
Activation Time to 0 would allow the
system to function in switch mode, where
the system would activate the relay when
movement was detected and deactivate it
when no movement was detected. Setting
the Switch Activation Time to a value
other than 0 would allow the system to
function in Time-Delay mode, where if a
movement was detected, the system would
activate the relay for the value set by the
track-bar (in seconds), then the relay would
be deactivated if no further movement was
detected.
Once track-bars were set to the desired values
and Apply Settings button was clicked, the
approach stored all values in a CSV file. These
settings were used to detect movement for
different users.
When the Start button from the UI was
pressed, the approach used the settings stored in
the CSV file and Background-subtraction to
compare each pixel of the new frame with the
previous frame. If a pixel in the new frame was
changed by a value more than the Sensitivity
value and a number of adjacent pixels identified
as changed were larger than the Detection Area,
the system would draw a green contour around
the changed pixels and would identify the new
frame as changed as shown in figure 3. Where
figure 3a shows a user’s thumb when no
movement was detected and figure 3b shows the
user’s thumb when movement was detected and
green contours identify the movement area.
Figure 2: TI used to control Background-subtraction
algorithm settings.
Figure 3: Video feed showing user’s thumb; a: no
movement detected, b: movement detected.
If the number of consecutive frames
identified as changed was higher than the Motion
Speed, the program would send logic high
voltage to a specific pin. That logic high value
would activate the relay.
2.2 Python Imaging Library Algorithm
A second Computer-Vision algorithm was used
to improve sensitivity and accuracy. A similar
procedure used in the previous Sub-section was
followed. Python Imaging Library (PIL) was
used instead of the Background-subtraction
algorithm.
PIL compared each pixel of the new image
with the previous image taken. If the new image
was different from the previous image, the
approach a high logic voltage to the output pin.
The high logic value was used to trigger a relay.
Sensitivity to movement and the amount of
movement required to trigger the relay could be
adjusted using “Sensitivity” and “Threshold”
parameters in the Python program. Sensitivity
represented the number of pixels in the new
image required to be different in order to detect
ISAIC 2022 - International Symposium on Automation, Information and Computing
82
a movement. The threshold represented the level
of difference in the same pixels in two
consecutive images to be considered as different.
2.3 Open Source Computer Vision
Algorithm
The third attempt to improve sensitivity and
accuracy considered an Open-Source-
Computer-Vision (Open-CV) Algorithm. A
similar procedure used in the previous Sub-
section was followed. OpenCV was used to
analyse consecutive images captured. Sensitivity
and Detection Area values were assigned.
OpenCV algorithm compared each pixel in the
new image taken against pixels from the
previous image. If a pixel in the new image was
changed by a value greater than the Sensitivity
value and the number of neighbouring pixels
marked as changed was greater than the
Detection Area, the system identified these
pixels by drawing a green contour around them.
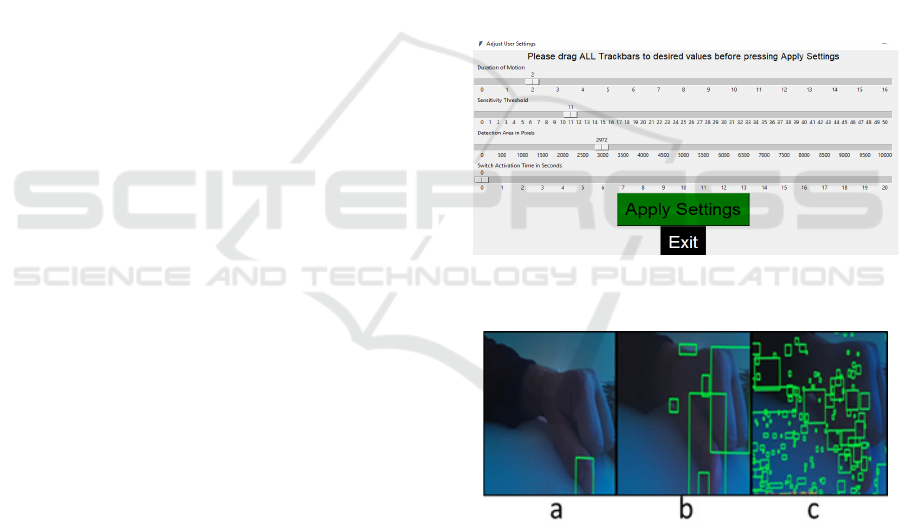
A new TI was created to adjust system
sensitivity and the amount and duration of
movement required to trigger the relay circuit.
Figure 4 shows the new TI. The new TI had two
buttons: Apply Settings and Exit. Four track-bars
used to modify OpenCV settings:
Duration of Motion: The number of
consecutive images having motion.
Sensitivity Threshold: The minimum
difference required in a given pixel in two
consecutive images to be marked as
changed.
Detection Area in Pixels: The area of
neighbouring pixels marked as changed in
two consecutive images.
Switch Activation Time in Seconds: This
track-bar permitted the new approach to
work in two different functions: Switch
and Time-Delay. Setting this track-bar to
0, the new system would operate as a
switch (Switch mode), where the relay
would be triggered once a movement was
detected and deactivated when no
movement was detected. Setting this track-
bar to any other value would operate the
system in a Time-Delay mode. When a
movement was detected, the relay would
remain triggered for that value of time (in
seconds). Then the relay would be
triggered back to off when no movement
was detected.
Once track-bars were set to desired values
and the Apply Settings button was clicked, the
program would store the new values and update
values used in the program. Figure 5 shows the
new system detecting movement with different
settings. Figure 5a shows the new system
detecting movement with relatively low
sensitivity and a large detection area, figure 5b
with medium sensitivity and medium detection
area and figure 5c with relatively high sensitivity
and small detection area. These settings allowed
the new system to be used by different users with
different levels of functionality and types of
disabilities.
Figure 4: New TI used to modify OpenCV sensitivity and
amount and duration of movement required.
Figure 5: New approach detecting movement with different
settings: a: low sensitivity and a large detection area, b:
medium sensitivity and medium detection area and c: high
sensitivity and small detection area.
3 DISCUSSION AND RESULTS
The work presented in this paper described a new
approach to steering a smart wheelchair using
zero-force sensing and Computer-Vision
algorithms. The new approach used a circuit that
Computer Vision Algorithms to Drive Smart Wheelchairs
83

connected a camera, a Raspberry Pi and a relay.
A Python program was created and installed on
Raspberry Pi. The program implemented three
Computer-Vision algorithms to conduct image
processing and control the camera and the relay.
The camera was directed toward a user’s
thumb/limb which generated voluntary
movements that were used to control a powered
wheelchair. A simple UI was used to operate the
new approach and a TI was used to adjust image
and movement detection settings. The level of
sensitivity, speed and amount of movement
required could be adjusted using track-bars in the
TI. All three algorithms successfully detected all
movements in front of the camera and
surrounded it by a green contour. The new
approach analysed that movement and compared
it to stored settings. If the change detected in an
image was greater than stored values, the new
approach would identify that change and trigger
a relay used to control a powered wheelchair.
The new approach was tested practically and
it successfully detected movement. The new
approach operated in silence and did not
generate a clicking sound when operated.
The new approach could be used by multiple
users. Specific values for “Sensitivity” and
“Threshold” could be allocated for each new
user according to their level of functionality
using the trackbars in the TI.
4 CONCLUSIONS AND FUTURE
WORK
The new approach used a friendly User
Interface, detected movements used to operate a
smart wheelchair and needed less effort to
operate a smart wheelchair.
The authors are planning to upload the
program and schematic diagram to an open-
access platform. Users will be able to download
them free of charge.
Three different Computer-Vision algorithms
were compared to improve sensitivity to
movement and detection accuracy. Results
showed that the new approach provided fast
movement detection. Track-bars used in the new
approach provided enhanced motion detection
settings.
The speed of movement considered in this
approach could be used to filter out unwanted
movement including user hand tremors or
undesired movement generated from driving a
powered wheelchair on the unsettled ground.
OpenCV provided more accurate and
sensitive image detection when compared to
other Computer-Vision algorithms. PIL was
easier to install and set up on the Raspberry Pi
than other algorithms. The Background-
subtraction algorithm approach provided faster
movement detection.
Future work will further investigate general
shifts in impairment from purely physical to
more complex mixes of cognitive/physical. That
will be addressed by considering levels of
functionality rather than disability. New
transducers and controllers that use dynamic
inputs rather than static or fixed inputs will be
investigated. Different AI techniques will be
investigated and combined with the new types of
controllers and transducers to interpret what
users want to do. Smart Inputs that detect sounds
and dynamic movement of body-parts using new
contactless transducers and/or brain activity
using EEG.
REFERENCES
Sanders, D., Gegov, A., 2018. Using artificial intelligence
to share control of a powered-wheelchair between a
wheelchair user and an intelligent sensor system,
EPSRC Project, 2019.
Haddad, M., Sanders, D., 2020. Deep Learning architecture
to assist with steering a powered wheelchair, IEEE
Trans. Neur. Sys. Reh. 28 12 pp 2987-2994.
Krops, L., Hols, D., Folkertsma, N., Dijkstra, P. Geertzen,
J., Dekker, R., 2018. Requirements on a community-
based intervention for stimulating physical activity in
physically disabled people: a focus group study
amongst experts, Disabil. Rehabil. 40 20 pp 2400-2407.
Bos, I., Wynia, K., Almansa, J., Drost, G., Kremer, B.,
Kuks, J., 2019. The prevalence and severity of disease-
related disabilities and their impact on quality of life in
neuromuscular diseases, Disabil. Rehabil. 41 14 pp
1676-1681.
Frank, A., De Souza, L., 2018. Clinical features of children
and adults with a muscular dystrophy using powered
indoor/outdoor wheelchairs: disease features,
ISAIC 2022 - International Symposium on Automation, Information and Computing
84

comorbidities and complicationsof disability, Disabil.
Rehabil. 40 9 pp 1007-1013.
Sanders, D., Langner, M., Tewkesbury, G., 2010.
Improving wheelchair‐driving using a sensor system to
control wheelchair‐veer and variable‐switches as an
alternative to digital switches or joysticks, Ind Rob: An
int' jnl. 32 2 pp157-167.
Sanders, D., Haddad, M., Tewkesbury, G., 2021a.
Intelligent control of a semi-autonomous Assistive
Vehicle. In SAI Intelligent Systems Conference.
Springer.
Haddad, M., Sanders, D., Tewkesbury, G., Langner, M.,
2021a. Intelligent User Interface to Control a Powered
Wheelchair using Infrared Sensors. In SAI Intelligent
Systems Conference. Springer.
Sanders, D., Bausch, N., 2015. Improving steering of a
powered wheelchair using an expert system to interpret
hand tremor. In the International Conference on
Intelligent Robotics and Applications. University of
Portsmouth.
Sanders, D., 2016. Using self-reliance factors to decide how
to share control between human powered wheelchair
drivers and ultrasonic sensors, IEEE Trans. Neur. Sys.
Rehab.25 8 pp 1221-1229.
Haddad, M., Sanders, D., Gegov, A., Hassan, M., Huang,
Y., Al-Mosawi, M., 2019. Combining multiple criteria
decision making with vector manipulation to decide on
the direction for a powered wheelchair. In SAI
Intelligent Systems Conference. Springer.
Haddad, M., Sanders, D., Langner, M., Ikwan, F.,
Tewkesbury, G., Gegov, A., 2020a. Steering direction
for a powered-wheelchair using the Analytical
Hierarchy Process. In 2020 IEEE 10th International
Conference on Intelligent Systems-IS. IEEE.
Haddad, M., Sanders, D., Thabet, M., Gegov, A., Ikwan, F.,
Omoarebun, P., Tewkesbury, G., Hassan, M., 2020b.
Use of the Analytical Hierarchy Process to Determine
the Steering Direction for a Powered Wheelchair. In
SAI Intelligent Systems Conference. Springer.
Haddad, M., Sanders, D., 2019. Selecting a best
compromise direction for a powered wheelchair using
PROMETHEE, IEEE Trans. Neur. Sys. Rehab. 27 2 pp
228-235.
Haddad, M., Sanders, D., Ikwan, F., Thabet, M., Langner,
M., Gegov, A., 2020c. Intelligent HMI and control for
steering a powered wheelchair using a Raspberry Pi
microcomputer. In 2020 IEEE 10th International
Conference on Intelligent Systems-IS. IEEE.
Haddad, M., Sanders, D., Langner, M., Bausch, N., Thabet,
M., Gegov, A., Tewkesbury, G., Ikwan, F., 2020d.
Intelligent control of the steering for a powered
wheelchair using a microcomputer. In SAI Intelligent
Systems Conference. Springer.
Haddad, M., Sanders, D., Langner, M., Omoarebun, P.,
Thabet, M., Gegov, A., 2020e. Initial results from using
an intelligent system to analyse powered wheelchair
users’ data. In the 2020 IEEE 10th International
Conference on Intelligent Systems-IS. IEEE.
Haddad, M., Sanders, D., Langner, M., Thabet, M.,
Omoarebun, P., Gegov, A., Bausch, N., Giasin, K.,
2020f. Intelligent system to analyze data about powered
wheelchair drivers. In SAI Intelligent Systems
Conference. Springer.
Sanders, D., Haddad, M., Tewkesbury, G., Bausch, N.,
Rogers, I., Huang, Y., 2020a. Analysis of reaction times
and time-delays introduced into an intelligent HCI for a
smart wheelchair. In the 2020 IEEE 10th International
Conference on Intelligent Systems-IS. IEEE.
Sanders, D., Haddad, M., Langner, M., Omoarebun, P.,
Chiverton, J., Hassan, M., Zhou, S., Vatchova, B.,
2020b. Introducing time-delays to analyze driver
reaction times when using a powered wheelchair. In SAI
Intelligent Systems Conference. Springer
Sanders, D., Haddad, M., Tewkesbury, G., Gegov, A.,
Adda, M., 2021b. Are human drivers a liability or an
asset?. In SAI Intelligent Systems Conference.Springer.
Sanders, D., Gegov, A., Haddad, M., Ikwan, F., Wiltshire,
D., Tan, Y. C., 2018. A rule-based expert system to
decide on direction and speed of a powered wheelchair.
In SAI Intelligent Systems Conference. Springer.
Sanders, D., Haddad, M., Tewkesbury, G., Thabet, G.,
Omoarebun, P., Barker, T., 2020c. Simple expert
system for intelligent control and HCI for a wheelchair
fitted with ultrasonic sensors. In the 2020 IEEE 10th
International Conference on Intelligent Systems-IS.
IEEE.
Tewkesbury, G., Lifton, S., Haddad, M., Sanders, D., 2021.
Facial recognition software for identification of
powered wheelchair users. In SAI Intelligent Systems
Conference. Springer.
Haddad, M., Sanders, D., Langner, M., Tewkesbury, G.,
2021b. One Shot Learning Approach to Identify
Drivers. In SAI Intelligent Systems Conference.
Springer.
Lewis, C., 2007. Simplicity in cognitive assistive
technology: a framework and agenda for research,
Universal Access in the Information Society 5 4 pp 351-
361.
Computer Vision Algorithms to Drive Smart Wheelchairs
85
