
Model-Based Prediction for Navigation Assistance Using a Set of
Sensors
David Sanders
1
, Giles Tewkesbury
1
, Shikun Zhou
1
and Malik Haddad
2
1
Faculty of Technology, University of Portsmouth, Anglesea Road, Portsmouth, U.K.
2
Northeastern University – London, St. Katharine’s Way, London, U.K.
Keywords: Model-Based, Prediction, Navigation, Assistance, Sensors.
Abstract: Navigation assistance is a vital step towards higher level automation and intelligence. This paper presents a
new conceptual design for an assistive system. It helps to manoeuvre powered wheelchairs in challenging
situations so that more people can drive them. The method is based on dynamic motion prediction using
sensors to provide information about the surroundings. Generic components of the assistive system are
presented based on manoeuvre prediction. Wheelchair user behaviour was analysed while they were driving
their wheelchairs. Other aspects are discussed, including the precision of the models built upon actuator and
environmental data collected from a strategically selected set of sensors.
1 INTRODUCTION
Powered wheelchairs and other mobility platforms
have been equipped with assistive systems to avoid
collisions (Haddad et al, 2020a; 2020b; Okonor et al,
2019; Sanders et al, 2019a; 2019b; 2019c; 2020) and
aid with steering (Sanders et al, 2010; 2015; 2016;
2017; 2018a; 2020; Haddad and Sanders, 2020). Such
systems have assisted wheelchair drivers, especially
when manoeuvring through doorways and through
narrow gaps, or in complicated environments or
adverse weather. Research described in this paper
aims to create new control systems for powered
wheelchairs (Haddad et al, 2019a; 2019b; 2020c;
2020d; Sanders et al, 2018b; Sanders, 2017).
Wheelchairs require high levels of safety and
efficiency, especially when approaching obstacles or
entering narrow spaces such as doorways. The
prototype systems were created during the first phase
of the project to process data when cope with an
obstacle, optimise paths and automatically assist the
user with selecting a safer path using a set of sensors.
2 BACKGROUND
Mobility problems can be tackled in many ways. A
powered wheelchair or scooter could cause many
problems if people could drive them. This paper
considers ways of helping people to drive. However,
many other solutions, devices and systems exist to
assist people with disabilities including personal
devices such as crutches, wheelchairs, white canes,
and systems or devices built into the surrounding
environment such as wheelchair ramps, textured
platform slabs in railway stations and Pelican
crossing beepers. Local bus services could be
modified to be more accessible. Disabled people
could equip with computers so that they can do more
without the needing of more carers. Self-mobility has
many advantages and some will be addressed in this
work. The best solution would be one that was
feasible, preferred by the person operating the system
and affordable. That may not always be archived by a
single technological solution.
In the UK, shops and other public places are
obliged to be accessible to disabled people. It is often
assumed that “disabled” means “wheelchair user” so
that making doorways wider and adding a ramp might
be considered enough. Although a lot of disabled
people are not in wheelchairs. Most environmental
adaptations address problems and deficiencies in
wheelchair performance. For example, lifts and
ramps have been fitted instead of or as well as steps,
doorways have been widened, thresholds made level,
and door handles moved or automatic doors installed.
Other adaptations include the addition of grab handles
and handrails, and clear markings of accessible
routes. People with sensory disabilities can usually
92
Sanders, D., Tewkesbury, G., Zhou, S. and Haddad, M.
Model-Based Prediction for Navigation Assistance Using a Set of Sensors.
DOI: 10.5220/0011903500003612
In Proceedings of the 3rd International Symposium on Automation, Information and Computing (ISAIC 2022), pages 92-97
ISBN: 978-989-758-622-4; ISSN: 2975-9463
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
move themselves. Adaptations made for people with
sensory disabilities usually provide extra information,
for example through high contrast signs. Audio signs
can provide information and textured flooring, which
with tactile and audio cues can improve safety
greatly. People with cognitive disabilities can have
information provided to them in a more accessible
way. Buildings and internal spaces can be constructed
to make route finding easily memorable and intuitive.
Colour coding of locations can make them more
memorable and distinct. Simple changes may have
significant impacts. Removing steps from shops
could significantly improve accessibilities whilst
wheelchairs are still the most important mobility aids.
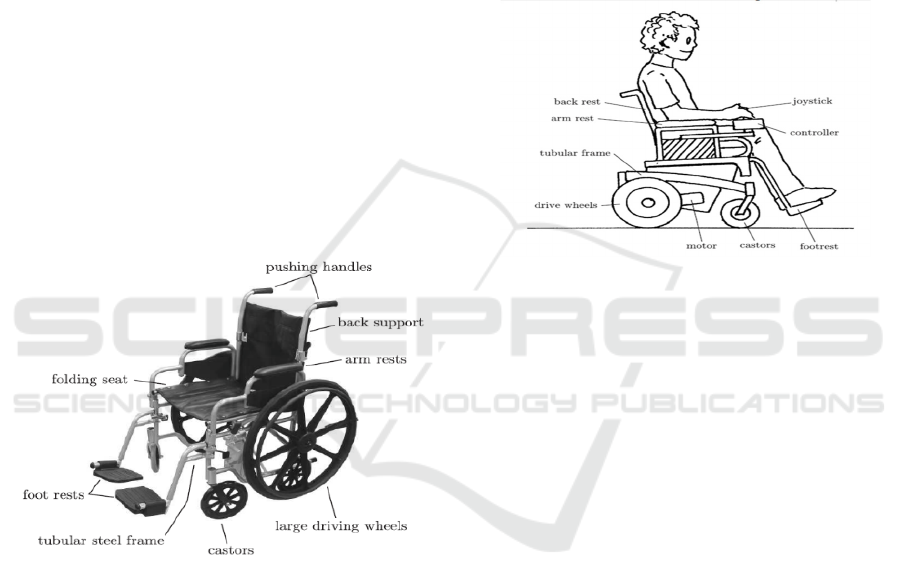
2.1 Manual Wheelchair
Manual wheelchairs are used by many millions of
people even today. There are many different models.
The typical design of the majority of such
wheelchairs are shown in Figure 1 from “Disability
and Mobility: Problems of Navigation, Orientation
and Locomotion, and Internal Report from the Bath
Institute of Medical Engineering.
Figure 1: Main features of a manual chair (Sanders, 2017).
The design is a compromise. The driving wheels
are large to place the rims within easy reach of the
wheelchair user, to move over uneven ground more
easily and to have a low rolling resistance. Driving
wheels are usually narrow and pneumatic but can be
filled with puncture-proof polyurethane foam
(although they have a higher rolling resistance).
Castors are small and at the front with solid and hard
rubber tyres. Hard tyres are less comfortable but
reduce rolling resistance and make the wheelchair
more manoeuvrable. But they make the wheelchair
more difficult to operate on uneven or softer ground.
Footrests are important for users’ comfort. The
backrest keeps the user upright in the chair, while its
heights can vary. Some manual chairs are fitted with
pushing handles. Wheelchair frames are similar to
bicycle frames and are constructed in similar ways
using steel, aluminium alloy, titanium or carbon fibre.
There are specialist designs for special occasions,
such as, off-road, skiing, rugby, basketball and tennis.
2.2 Powered Wheelchairs
If wheelchair users cannot use manual wheelchairs or
find manual wheelchairs tiring, then powered
wheelchairs are an alternative. A typical design of a
powered wheelchair is shown in Figure 2.
Figure 2: Features of a powered chair (Sanders, 2017).
There have been three main configurations of
powered wheelchairs, with driving wheels at the
back, in the front or in the middle. Front wheel drive
powered wheelchairs are more manoeuvrable and can
climb curbs more easily. However, they can lose their
traction on steeper gradients, especially on wet and
slippery surfaces. They do allow a user to approach
objects more closely. Centre wheel driven powered
wheelchairs provide good traction and are
manoeuvrable as the wheelchair user sits directly
above the driving wheels but they can feel `tippy'
when weight is transferred from the back to the front
or vice versa when speeding up or slowing down.
Rear wheel drive is the most common type because it
is the most compact design. They are easier to be built
and have the best traction when climbing. Most
folding powered wheelchairs are rear wheel drive.
The chair used in this research was front wheel drive.
There are many designs of frame for powered
wheelchairs. Frames are rigid and able to support the
user and powertrain while keeping the centre of
gravity low. They are usually made form welded steel
tube (although aluminium is used as well). Driving
wheels are smaller than a manual wheelchair, while
just large enough to climb curbs. Tyres are most often
treaded. Motors usually run on 24 Volts DC and are
energy efficient, with ease of control (with a wide
speed range) and can deliver high torques. Two 12
Model-Based Prediction for Navigation Assistance Using a Set of Sensors
93

Volt sealed lead acid batteries tend to be used in series
to deliver high currents, can be trickle charged for
long periods, and are affordable. However, they are
relatively heavy and could be damaged if completely
discharged. Alternatives include Lithium and Nickel
Metal Hydride batteries. Lithium can deliver high
current, charge quickly, are lighter and have higher
energy density but are expensive.
Wheelchair controllers are complex. They take
inputs from a human wheelchair user to manoeuvre
wheelchair typically via a pair of motors. The
controller must be able to make smooth operations in
both directions and speeds. A joystick is usually a
standard user interface and used by many disabled
people. Pushing a joystick forward moves a powered
wheelchair forward. Pulling a joystick sideways turns
a powered wheelchair left or right. The further a
joystick moves away from a neutral central position,
the faster a powered wheelchair travel. However, a
group of disabled people are not able to use joysticks,
therefore other control options are made available
such as head operated switches, chin operated
joysticks and suck/blow controllers. Some power
wheelchairs have additional features, for example,
there are wheelchairs that can rise, wheelchairs with
many different special seating configurations, and
specific designs of off road powered wheelchair.
The research described in this paper used a Bobcat
II wheelchair as shown in Figure 3. The Bobcat II
wheelchair was controlled by a joystick and had
ultrasonic sensors mounted on it to help a user to
safely drive, avoid obstacles, and negotiate gaps,
narrow spaces, and doorways.
Figure 3: Bobcat II Wheelchair.
3 SYSTEM COMPONENTS
Assistance for wheelchair navigation has been
defined in this research as a visualization of the
predicted dynamic motion of the wheelchair based on
current joystick settings and relevant environmental
forces. A ‘dynamic motion model’ formed the main
basis for a manoeuvre prediction system, as shown in
figure 4.
Figure 4: Components of the assistance system.
The dynamic model represented the relationship
between the joystick configurations and the
corresponding actions of the wheelchair. It
considered the actuators and their collaborated
effects, such as the different effects at various
accelerations and velocities. The influences from
external forces against actuator forces and matching
timings should be considered. These can be
formulated by the equations of motion with at least 2
Degrees Of Freedom. The relationship between
joystick configurations and actuators’ responding
forces, as well as the model parameters, such as those
representing external forces, were collected and
included in a number of lookup tables. The
wheelchair-model parameters were tuned using
programs in MATLAB as the wheelchair was
simulated undertaking different manoeuvres to
achieve a best outcome based on measured motion
states and model data.
Lookup tables were generated from measurement
data, their interpolation and extrapolation covering
the complete setting ranges. The data covers whether
they described the characteristic behaviour in all
motion states of the wheelchair, especially when
manoeuvring close to obstacles or in narrow gaps, for
example doorways. Data was collected during typical
wheelchair operations. The measurement equipment
on board the wheelchair together with data collecting
interfaces decided the quality of the data.
Supplemental sensors may be needed to strengthen a
sufficiently accurate model, in particular sufficiently
accurate orientation and position data.
The measured actuator and sensor data needed to
be synchronised and fused to with a set of consistent
time stamps for a complete modelling. Each
supplemental sensor had a different sampling rate and
the data was synchronised. The model depended on
fusing data, including assignment of weights to the
data according to their quality in each situation. There
ISAIC 2022 - International Symposium on Automation, Information and Computing
94

were different options to assist in navigation using
proximity recognition systems. Potential sensors
were ultrasonics, cameras, radar or Light Detection
and Ranging based sensors, which are often used in
automotive industry. Ultrasonic sensors were selected
for this work because they were robust and cheap.
Distances to objects needed to be correlated with
wheelchair position. When close to obstacles, the
proximity data was given the highest weighting
within the sensor fusion modules, partially because of
the application and its high reliability.
An essential component of the model was the
environmental data as well as their impact on the
manoeuvrability of the wheelchair. An assistance
system offered the opportunity to integrate
environmental impacts within the dynamic motion
model. Responding motion actions from the joystick
commands with the impact from the environmental
forces could be modelled. Adequacy would be
evaluated by correlating the predicted path and the
required space. This needed an appropriate map.
Automatic adaptation of these monitoring parameters
was needed.
It was possible that each wheelchair user could
have a personal configuration set, which would allow
alarms and hints to be given. The degree of
automation was also increased by including collision
avoidance and automatically calculated evasive
paths.
4 MANOEUVRING BEHAVIOUR
Interviews, observations and automated data
collection were used in this work. A questionnaire-
based survey was created to collect and analyse
individual behaviour data when driving. The first part
of this survey addressed the conventional use of
joysticks.
Automatic data collection evaluated joystick and
sensor usages in terms of effectiveness and
efficiency. The usage was classified on a scale from
0 (= never) to 10 (= always), depending on how
frequently each parameter was used. Similarly, the
data from carers and researchers observing tests were
collected and evaluated. A list of the usual parameters
were compiled, which included obstacles’ size,
number of collisions, location of obstacles and
distances to obstacles.
In the second phase of the project, interviewing
with wheelchair users took place to elicit additional
information. Different pictures were shown to users
to learn about their possible reactions in different
situations.
The personal opinions in the questionnaire-based
survey varied widely and demonstrated the divested
individual approaches to driving. Tendentiously,
wheelchair users appeared to use absolute values than
the relative. The location of the wheelchair, the
reactive correction for veer and the distance to the
target location were the most common values
considered by the users. In addition, different
distances were monitored regularly such as distance
to obstacles or to other powered wheelchairs and
people. The frequency of assessing the environmental
factors depended on the ability and skills of the
driver. Participants commented that the sensors were
usually helpful but sometimes not. In some certain
circumstances, the usage of some sensors slowed
down the wheelchair unnecessarily and made
inefficient manoeuvres.
The majority of clinicians and engineers
considered the saving of manoeuvring data including
manoeuvre points with velocities and actuator values
as useful. The data were especially useful in the
analysis of collisions or critical manoeuvres as well
as in training sessions.
A further part of the survey addressed alarms
depending on velocity and distance to obstacles.
Most people thought it was a good idea but did not
want to use it themselves. For the distances to
obstacles, the majority preferred combinations of
optical and acoustic alarms.
There was a need (at least in psychological terms)
to personalise the assistance systems. Personalisation
had different advantages. Each user could choose
their own additional parameters depending on their
individual circumstances. The user continued to be
responsible for manoeuvring and the manoeuvre
prediction calculated the future motion of the
wheelchair resulting from joystick settings and
external forces. The prediction provided a greater
certainty in guidance accompanied by fewer actuator
variations. Because of the precision, the mental
knowledge base of an experienced user was further
improved. During training, the prediction helped
build a personal dynamic model without any extra
risk.
5 PROXIMITY RECOGNITION
Proximity recognition can be especially important in
dark environment or if the user is visually impaired.
A new proximity recognition system was created. A
combination of ultrasonic and infrared sensors were
installed on the wheelchair to detect hazardous
Model-Based Prediction for Navigation Assistance Using a Set of Sensors
95

objects surrounding the vehicle. Sensor fusion was
used to fuse proximity recognition data.
Time of flight served as a measurement of the
distance between sensors and obstacles. Sixteen
independent active channels were used for
simultaneous acquisition arranged with a 90° field of
view. The module was mounted at the front of the
wheelchair between the footrests. The accuracy of
the sensor system could allow for precise object
identifications in the future.
6 QUALITATIVE STUDY
A qualitative exploratory study was undertaken as
part of a group project during an extended
undergraduate degree at the University of
Portsmouth. Individual interviews were conducted
using a semi-structured interview guide with probes
and open-ended questions. Participants were asked
about their wheelchair use and any unmet mobility
needs. Participants were then shown demonstrations
of the new systems. After the demonstrations,
participants were questioned regarding the new
systems.
Two main themes emerged, namely,
“Overcoming challenges” and “Useful features”.
6.1 Overcoming Challenges
These challenges most commonly related to the
following categories and circumstances:
• Hazardous environments:
- inaccessible buildings,
- narrow entrances,
- small elevators,
- pavements in poor condition,
- and narrow store aisles;
• Hazardous weather conditions:
- Such as rain, fog, and snow,
- or any condition causing poor visibility;
• Special venues
- shopping centers,
- stadiums and
- festivals.
After the demonstrations, volunteers reported that
the new features could alleviate some of challenges.
Obstacle avoidance was particularly highlighted,
praised and recognised to reduce possible difficulties
of wheelchair users.
Volunteers did express concerns regarding their
ability of learning and using the new technology.
They didn’t want the new technologies to weaken
their own abilities. Volunteers mostly only perceived
some of the features as being relevant. Several were
skeptical about trusting the new systems more than
their own knowledge and abilities, or were concerned
about reliability. Others thought the new systems
could respond more quickly in emergencies.
6.2 Useful Features
Two features were potentially the most helpful:
obstacle avoidance and path following. Volunteers
felt the new systems could be especially useful when
they were tired as the new systems could reduce
physical and cognitive effort. Volunteers thought the
systems could be especially useful for people with:
slow reactions, tiredness, poor upper extremity motor
control or reduced vision. The new systems could also
become increasingly useful as people age, and
cognitive and visual impairments increase. The
systems could be especially useful to people with
slow progressive conditions that deteriorate so that
manual control may be ineffective or even totally lost.
7 DISCUSSION & CONCLUSIONS
Assistive devices and changes to the environment
could help provide independent mobility for people
with disabilities. If a disabled person needed help in
order to become mobile, then they were much less
independent. This paper presented a new conceptual
design and generic components for an assistive
system. The method was based on dynamic motion
prediction using sensors to provide information about
the surroundings.
Relevant data must be acquired by sensors with
sufficient precision to characterize motion and
position in relation to obstacles. Collected data were
filtered, synchronised and fused for modelling and
online in real time for driving.
Conventional behaviour during driving was
surveyed using a questionnaire-based survey
followed up with interviews. Highly individual
approaches were obvious in the responses, discussion
about driving and in observing the driving.
It was concluded that the next developments of the
system must offer customisable functionality. A
personalized system could also provide an
opportunity to introduce automation in a gentle
manner.
In the second phase of the project, a higher level
of automation and intelligence is planned. The
developed methods will be demonstrated in real time
and using real powered wheelchairs.
ISAIC 2022 - International Symposium on Automation, Information and Computing
96

Proximity recognition systems will be redesigned
to improve sensor fusion, considering the number of
sensors and their combination (with different types)
to adapt the sensor system. Processing of the sensor
data was complicated because of the distribution and
different types of sensors. Adequate proximity
recognition is a precondition for assistive automated
systems.
REFERENCES
Haddad, M., Sanders, D., 2019a Selecting a best
compromise direction for a powered wheelchair using
PROMETHEE. IEEE Trans. Neur. Sys. Rehab. 27 2 pp
228-235.
Haddad, M., Sanders, D., Gegov, A., Hassan, M., Huang,
Y., Al-Mosawi, M., 2019b Combining multiple criteria
decision making with vector manipulation to decide on
the direction for a powered wheelchair Proc. SAI
Intelligent Systems Conference, (London) pp 680-693.
Haddad, M., Sanders, D., Langner, M., Omoarebun, P.,
Thabet, M., Gegov, A., 2020a Initial results from using
an intelligent system to analyse powered wheelchair
users’ data Proc. 2020 IEEE 10th International
Conference on Intelligent Systems 2 pp 241-245.
Haddad, M., Sanders, D., Langner, M., Thabet, M.,
Omoarebun, P., Gegov, A., Bausch, N., Giasin, K.,
2020b Intelligent system to analyze data about powered
wheelchair drivers Proc. SAI Intelligent Systems
Conference (Amsterdam) pp 584-593.
Haddad, M., Sanders, D., Langner, M., Thabet, M.,
Omoarebun, P., Gegov, A., Bausch, N., Giasin, K.,
2020c Intelligent system to analyze data about powered
wheelchair drivers Proc. SAI Intelligent Systems
Conference (Amsterdam) pp 584-593.
Haddad, M., Sanders, D., Langner, M., Ikwan, F.,
Tewkesbury, G., Gegov, A., 2020d Steering direction
for a powered-wheelchair using the Analytical
Hierarchy Process Proc. IEEE 10th International
Conference on Intelligent Systems (Varna)pp 229-234.
Haddad, M., Sanders, D., Thabet, M., Gegov, A., Ikwan, F.,
Omoarebun, P., Tewkesbury, G., Hassan, M., 2020e
Use of the Analytical Hierarchy Process to Determine
the Steering Direction for a Powered Wheelchair Proc.
SAI Intelligent Systems Conf (London) pp 617-630.
Okonor, O., Gegov, A., Adda, M., Sanders, D., Haddad, M.,
Tewkesbury, G., 2019 Intelligent approach to
minimizing power consumption in a cloud-based
system collecting sensor data and monitoring the status
of powered wheelchairs. Intelligent Systems and
Applications. Advances in Intelligent Systems and
Computing 1037 Springer pp 694-710.
Sanders, D., Langner, M., Tewkesbury, G., 2010,
Improving wheelchair‐driving using a sensor system
to control wheelchair‐veer and variable‐switches as
an alternative to digital‐switches or joysticks Ind Rob:
An int' jnl 32 2 157-167.
Sanders, D., Bausch, N., 2015 Improving steeri.ng of a
powered wheelchair using an expert system to interpret
hand tremor Proc. International Conf on Intelligent
Robotics and Applications (Portsmouth) pp 460-471.
Sanders, D., 2017 Using self-reliance factors to decide how
to share control between human powered wheelchair
drivers and ultrasonic sensors IEEE Trans Neur Sys
Rehab 25 8 pp 1221-1229.
Sanders, D., Sanders, B., Gegov, A., Ndzi, D., 2018 Results
from investigating powered wheelchair users learning
to drive with varying levels of sensor support Proc.
Intelligent Systems Conference (London) pp 241-245.
Sanders, D., Sanders, B., Gegov, A., Ndzi, D., 2018 Using
confidence factors to share control between a mobile
robot tele-operater and ultrasonic sensors Proc.
Intelligent Systems Conf (London) pp 1026-1033.
Sanders, D., Gegov, A., Haddad, M., Ikwan, F., Wiltshire,
D., Tan, Y., 2018 A rule-based expert system to decide
on direction and speed of a powered wheelchair Proc.
SAI Intelligent Systems Conf (London) pp 822-838.
Sanders, D., Langner, M., Bausch, N., Huang, Y.,
Khaustov, S., Simandjuntak. S., 2019 Improving
human-machine interaction for a powered wheelchair
driver by using variable-switches and sensors that
reduce wheelchair-veer Intelligent Systems and
Applications Advances in Intelligent Systems and
Computing 1038 Springer pp 1173-1191.
Sanders, D., Tewkesbury, G., Parchizadeh, H., Robertson,
J., Omoarebun, P., Malik, M., 2019 Learning to drive
with and without intelligent computer systems and
sensors to assist Intelligent Sys & App’s 1. Advances in
Intelligent Sys & Comp 868 Springer pp 1171-1181.
Sanders, D., Gegov, A., Tewkesbury, G., Khusainov, R.,
2019 Sharing driving between a vehicle driver and a
sensor system using trust-factors to set control gains
Intelligent Sys & Applications. Advances in Intelligent
Systems & Computing 868 Springer pp 1182-1195.
Sanders, D., Haddad, M., Tewkesbury, G., Thabet, G.,
Omoarebun, P., Barker, T., 2020 Simple expert system
for intelligent control and HCI for a wheelchair fitted
with ultrasonic sensors Proc. IEEE 10th International
Conference on Intelligent Systems (Varna) pp 211-216.
Sanders, D., Ndzi, D., Chester, S., Malik, M., 2016
Adjustment of tele-operator learning when provided
with different levels of sensor support while driving
mobile robots Lecture Notes in Networks and Systems
16 Springer pp 548-558.
Sanders, D., Haddad, M., Omoarebun, P., Ikwan, F.,
Chiverton, J., Zhou, S., Rogers, I., Vatchova., B 2020
Intelligent control and HCI for a powered wheelchair
using a simple expert system and ultrasonic sensors Int’
Sys & Applications 3. Advances in Intelligent Systems
& Computing 1252 Springer pp 571-583.
Model-Based Prediction for Navigation Assistance Using a Set of Sensors
97
