An Assistance System for Collision Avoidance Using
Context-Sensitive Prediction
David Sanders
1
, Malik Haddad
2
, Giles Tewkesbury
1
, Shikon Zhou
1
and Alexander Gegov
1
1
Faculty of Technology, University of Portsmouth, Anglesea Road, Portsmouth, U.K.
2
Northeastern University – London, St. Katharine’s Way, London, UK
Keywords: Assistance System, Collision Avoidance, Context-Sensitive, Prediction.
Abstract: An alert and collision avoidance system is introduced. A new method has been used to calculate a closest
point of approach, incorporating a context-sensitive prediction. Movement and routing information were used
and an approach for taking evasive action is described. When a potential collision was detected, then an
estimation was made of the direction of movement and an evasive manoeuvre was selected. A closest point
of approach was calculated between the wheelchair and any object detected in its vicinity. A linear motion
vector was calculated based on current speed, position and direction and that vector was compared with the
object position.
1 INTRODUCTION
This paper presents a system to reduce human
workload and misperceptions of driving situations.
The system provides pro-active collision avoidance
including methods for collision avoidance and
predicting wheelchair behaviour. It is a new Traffic
Alert and Collision Avoidance System, similar to
those used with commercial aircraft (Holdsworth,
2003). Figure 1 illustrates system infrastructure and
main functions. The system was created to reduce
collisions and support drivers with a collision alarm.
A closest point of approach was calculated by
applying context sensitive behaviour prediction
(Steidel, 2019). Additionally, an alarm helped with
assessing potential hazards. Cooperative manoeuvre
negotiation and critical situation resolution systems
contributed to reducing potential collisions.
Figure 1: System principles and functionalities.
This paper gives an overview of the concepts of
the system and discusses details of the system
presented in Figure 1, as well as describing the
concept of Escalation States shown in figure 2, which
depicts the likelihood of collisions.
Escalation States are used to assess how critical a
potential collision is and to provide a weighted
warning. The approach for predicting powered
wheelchair behaviours and the introduction of alarms
are developed. Following this, the concept of
reducing misunderstandings during potential
collisions is defined, focusing on evasive
manoeuvres. The integration of the system into a
powered wheelchair is briefed, followed by the
description of the validation process.
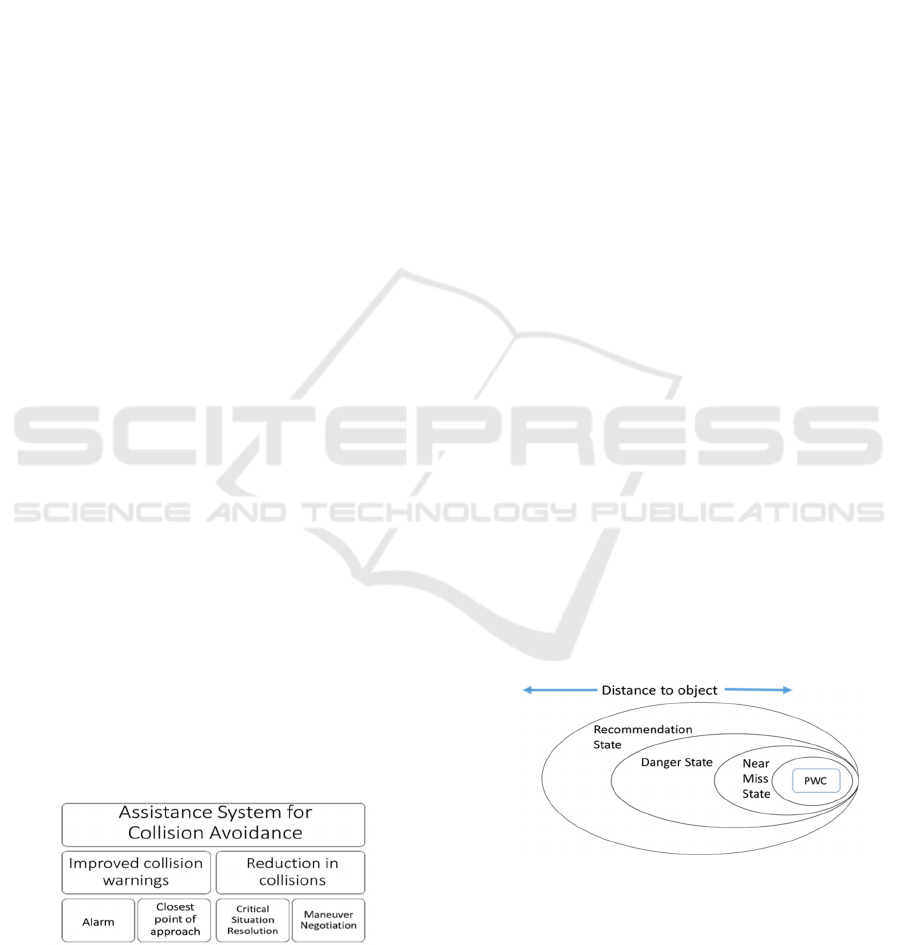
Figure 2: Escalation States.
2 DETECTING NEAR MISSES
AND COLLISIONS
The system tracked the movement of a powered
wheelchair and attempted to warn its user while
98
Sanders, D., Haddad, M., Tewkesbury, G., Zhou, S. and Gegov, A.
An Assistance System for Collision Avoidance Using Context-Sensitive Prediction.
DOI: 10.5220/0011903800003612
In Proceedings of the 3rd International Symposium on Automation, Information and Computing (ISAIC 2022), pages 98-103
ISBN: 978-989-758-622-4; ISSN: 2975-9463
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

minimising the number of alarms. Using context-
sensitive behaviour prediction, not only the number
of collision warnings, but also the number of
exaggerated and false alarms could be reduced.
Auto tracking with situation evaluation was
introduced to improve collision avoidance and reduce
the workload for wheelchair users. A concept of
Escalation States for assessing collisions was
developed in this work. This simplified situation
evaluation used a series of Escalation States.
Kamijo detected traffic patterns in video images
and was able to detect accidents (Kamijo et al, 2000).
Using a hidden Markov Model, the system learnt
various behaviour patterns. Xue presented a method
for collision-free trajectory planning (Xue et al,
2009). The method had three-steps. For the powered
wheelchair this would be: Identify target and powered
wheelchair position; Detect potential collisions; and
Control wheelchair. A three-degree of freedom model
was used to generate a possible route.
Xue used the potential field method (Sanders,
1995; Sanders et al, 1991; 1992a; 1992b; 2010a;
2010b, 2011; 2015) for route finding, whilst Tam and
Bucknall concentrated on close ranges and developed
a method for assessing collision risk by determining
encounter type (Tam, 2013). A method to evaluate the
probability of a collision was presented by Montewka
et al (2015). The shortest distance at which a collision
could be avoided was calculated, namely, Minimum
Distance to Collision. Youssef et al (2014) took work
from (Montewka et al, 2015) to develop a
probabilistic approach to select collision scenarios.
A Conflict Ranking Operator was presented by
Zhang (2015). Distance, speed and relative angle
were considered; therefore, decisions could be made
to avoid near-misses. Van Iperen (2015) introduced
two ways to detect near-misses. One deploys the
closest point of approach calculation while the other
used domains. The author evaluated the main
indicators for the level of safety in a specific area.
A review of work concerning collision avoidance
revealed some factors that can lead to a collision. The
biggest problems in collision avoidance are human
factors. That means to prevent collisions, the
uncertainty of the behaviour of other powered
wheelchairs and other humans needs to be
considered. Risk (and probability) of collision
increases with higher uncertainty. Distance, speed
and angle need to be considered in order to assess the
risk of a collision (Haddad et al, 2020a; 2020b;
2020c; Sanders et al, 2020a; 2020b.
The closest point of approach calculation
primarily considers distance. Manoeuvrability is also
important in solving the uncertainty problem by
generating the possible set of potential states of the
powered wheelchair. These findings were considered
when creating system concepts.
3 COLLISION WARNINGS AND
AVOIDANCE
Assistance systems have tended to generate collision
warnings based on a comparison of linear movement
vectors. However, a closest point of approach
calculated in this way can be unrealistic and
exaggerated, since external conditions and typical
movement patterns are not included. In addition,
alarms can be ignored by wheelchair users. The
newly developed system in this work uses two
concepts for generating improved collision warnings.
The first is called Critical Pose, which is an extension
of the traditional closest point of approach. In
addition to this, the system predicts the most probable
behaviour of a wheelchair. These concepts can avoid
some unnecessary alarms. The system also evaluates
the likelihood of collision using Escalation States. In
the following sections the Escalation States, the
closest point and behaviour prediction are described.
The system uses a concept of Escalation States to
assess the likelihood of collisions. Figure 2 shows the
concept. The further right an escalation state is plotted
in figure 2, the more critical the state.
In order to determine the different states, the
closest point must first be calculated. Next, the time
and distance that a powered wheelchair will need to
reach the calculated closest point is calculated. In this
work, the thresholds for each Escalation State were
obtained experimentally, which could be varied
depending on the abilities of different drivers
(Sanders et al, 2010). If the closest point was more
than a pre-set range (for example one meter) the
situation was labelled “Clear”, i.e.,no danger existed.
If the wheelchair continued to move towards an
object and required less than a pre-set time (for
example one second) to reach the closest point, the
wheelchair was in a Recommendation State. In this
state, the system triggered a warning. Behaviour
prediction would be used. This prediction gave an
estimation about how the powered wheelchair would
travel based on the analysis of historic data.
The wheelchair moved into a Danger State when
the time was less than a pre-set time (for example half
a second) and the distance to the closest point was less
than a set point (for example 0.5 meters). During this
State, the system could help wheelchair users avoid a
collision by applying a cooperative negotiation
An Assistance System for Collision Avoidance Using Context-Sensitive Prediction
99

algorithm that shared control of the wheelchair with
the driver (Sanders 2017; 2018).
This was the last possible state to prevent
collision. An Alarm was generated if the powered
wheelchairs were less than a critical pre-set time or
distance, such as 300 milliseconds or 0.2 meters from
the closest point. The system performed an
emergency manoeuvre to avoid collision by taking
control of the wheelchair. If a manoeuvre was not
carried out then a collision would become inevitable.
4 CRITICAL POSE
A way of assessing and identifying hazardous
wheelchair encounters was to calculate the closest
point of approach. A linear vector for a powered
wheelchair was generated based on position, speed
and course. These vectors were then compared to
produce a closest point of approach (a geographical
point). The closest point of approach was extended by
the calculation of two additional values: Distance to
closest point of approach (D
close
) and Time to closest
point of approach (T
close
). Drivers received a warning
if T
close
and D
close
fell below threshold values.
This procedure did have drawbacks. It was based
on the abstraction of wheelchair motion to linear
motion and the system lacked context information.
All sensors used for measuring course, speed and
position as well as those for detecting obstacles had
inaccuracies. A snapshot could combine these errors
and yield an imprecise closest point of approach. To
avoid this, the idea of a context-sensitive closest point
of approach was introduced. The calculation was
combined with a consideration of sensor inaccuracies.
A term for describing the result was introduced
“Critical Wheelchair Pose (closest point)”. In contrast
to the closest point of approach, the closest point was
defined by two values: position at which the
wheelchair had the shortest distance to an object and
the pose of the wheelchair at this position. Figure 3
illustrates the closest point concept and figure 4
represents the Evasive Manoeuvre Negotiation
.
Figure 3: Calculation of Closest Point of Approach.
Figure 4: Above: Single object (assumed to be another
wheelchair). Below: Multiple objects (assumed to be other
wheelchairs).
A wheelchair is depicted on the left side of figure
3. The straight line running from the wheelchair in the
direction of travel is the current course. The straight
line running from the object on the right side of figure
3 shows the dangerous path that might cause
collision. Sensor inaccuracies and possible changes
are represented by the two funnels. The funnel
describes the probability of the wheelchair's and
object’s position in the future, taking sensor errors
and possible change into account.
The funnel for the wheelchair was smaller than for
the object, because the wheelchair and wheelchair
sensor inaccuracy can be determined whilst the object
is usually unknown. Thus position, speed and course
of the wheelchair can be determined with a higher
accuracy so that future positions of the wheelchair
can be predicted more precisely. To calculate the
closest point, the two funnels are compared. Due to
the inaccuracies, the wheelchairs may be located at
any positions within their respective funnels. For the
closest point, the minimum distance between the
funnels was considered. This pessimistic assumption
helped better clarify the criticality of the situation.
The problem was addressed using path planning
algorithms (Sanders, 1995; Sanders et al, 1991)
during the calculation and introducing No-Go-Areas
and routing information. The outcome for the
calculation was that a wheelchair would not pass
through a No-Go-Area. Thus, a calculated closest
point should not be within a No-Go-Area. The system
used this extra information to calculate a closest point
using the current route for the wheelchair. The
advantages of using this method over conventional
methods was that unnecessary and exaggerated
alarms based on a linear closest point of approach
were avoided. This reduced stress and workload for
the wheelchair user.
When powered wheelchairs were in the
Recommendation State, the system predicted the
most probable behaviour of the powered wheelchair
using a rule-based approach (Sanders et al, 2011).
The approach had two levels. On the first level, a
prediction about the most probable behaviour of the
ISAIC 2022 - International Symposium on Automation, Information and Computing
100

powered wheelchair was made. A possible influence
of obstacles in the proximity were ignored. This
resulted in the most probable situation in the
proximity of a wheelchair, which was then used to
estimate potential collision risks. In order to support
the wheelchair users to assess and avoid potential
collisions, situations were classified as Head-On,
Overtaking or Crossing
(Steidel, 2019). This
classification was made in a second level. Following
this, the most probable resolution was predicted.
Mean values for course and speed of matching
historic movements were considered as a future value
for prediction. The most probable behaviour of the
wheelchair was predicted using an Artificial Neural
Network. Predicted behaviour was modelled using a
process similar to the one used by Ornstein-
Uhlenbeck to model uncertainty for.
Typical tracks were generated based on historic
data. Rule-based prediction was based on an
association between historic tracks and the current
track. The whole track was not predicted, but instead
the next likely powered wheelchair position was
produced a set time ahead (one second). Hence
typical behaviour was used as a prediction. Behaviour
of a powered wheelchair was modelled using Kernel
Density Estimation and predicted for a set time span.
In order to extract and learn patterns, the working area
was divided into different regions, i.e. a grid. Typical
patterns in a region could then be learned. This
enabled an extended possibility to predict behaviour
ahead of a certain time frame. As a result, future
positions in a grid were predicted. By applying Neural
Associative Learning, future behaviour was predicted
based on the patterns.
5 PREDICTION
The prediction algorithm in the first level required the
most common behaviour as a basis to predict the most
probable powered wheelchair behaviour.
5.1 Most Probable Behaviour
A rule-based system was used to make-a-decision
based on previous knowledge. Required knowledge
was obtained by analysing historic data to extract
patterns and rules for predicting behaviour in a
similar way to Oltmann and Pallotta (is there a
reference here? ). Extracted behavioural patterns were
modelled as a graph. The graph contained two types
of nodes: one representing geographical points where
objects were in the vicinity; the other represented
usual (historical) behaviour, that is points (targets) the
wheelchair was expected to move towards. For each
of those target nodes, a frequency distribution was
calculated which described recorded wheelchair
behaviours. The first-level prediction algorithm used
this information to decide where a powered
wheelchair would head. The rule-based approach for
predicting powered wheelchair behaviour on the first-
level was divided into two parts. The first aimed to
predict the most probable target. The node with the
highest accordance was selected as a potential
destination so that a possible path through the graph
from the current position to the predicted target could
be generated.
5.2 Prediction of Evasive Manoeuvres
This required predicted behaviour as an input.
Potential hazardous collisions were estimated. The
closest points on the predicted object track and
wheelchair route were predicted. If distance between
them at the closest point fell below a threshold, this
encounter was examined. The encounter was labelled
Head-On, Overtaking or Crossing. In the data
analysis phase, encounters for each of these situations
were extracted. A rule for evasive manoeuvres was
statistically extracted and applied to the identified
encounter based on the first-level prediction. As a
result, an evasive manoeuvre could be performed /
executed.
5.3 Evaluation
Prediction algorithms were applied using historical
data collected over three months of testing by two
interdisciplinary MEng Project Groups at the
University of Portsmouth. The testing region
consisted of two downstairs rooms and a section of
connecting corridor at the University. For evaluation
purpose, the related data was grouped as tracks. racks
and positions were selected randomly. Based on
positions, a potential destination and corresponding
tracks were predicted. Afterwards, the distance
between the historic and predicted track was
calculated. To evaluate the prediction algorithm for
the second-level, a route for a wheelchair was
generated. Several encounters with predefined
evasive manoeuvres were created. Starting from a
point on the track, the second algorithm yielded an
evasive manoeuvre. The predicted manoeuvre was
compared to the real evasive manoeuvre.
The algorithm for predicting Give-Way
performed better than the prediction of the destination
as shown in Table 1. For determining the distance
between the predicted track and the historic track, the
An Assistance System for Collision Avoidance Using Context-Sensitive Prediction
101

median of the distance between these two tracks was
used. This yielded an average distance of 20
centimetres.
Table 1. Prediction results.
Predicted Destination Give-Way
Correct 65% 76%
Incorrect 35% 24%
6 REDUCING
MISUNDERSTANDINGS
Before taking over the control from the wheelchair
user and performing an evasive manoeuvre it was
important that a consistent operational picture was to
be maintained. Misunderstandings could lead to
erroneous actions, which would result in collisions
even though the wheelchair user might be trying to
avoid it. To address this problem, the system included
an algorithm to negotiate evasive manoeuvres.
If a driver entered a Danger State, an evasive
manoeuvre would be applied. The calculation of the
evasive manoeuvre and the negotiation principles
aimed to assist a wheelchair driver but not to take over
control. A near miss or collision was classified as
Head-On, Crossing or Overtaking. This was a
parameter for the negotiation algorithm since
different kinds of evasive manoeuvres were
recommended depending on the classification. In
addition, it is necessary to have a list of assumptions
as:
• Objects were another wheelchair or person;
• Other wheelchairs and people would tend to want
to avoid collision; and
• Any other powered wheelchairs were equipped
with sensor systems.
Two cases were examined and analysed (Figure 4).
For the single object shown at the top part in Figure
4, the negotiation algorithm generated a manoeuvre
based on a wheelchair-to-wheelchair encounter.
Negotiation started with the evasive manoeuvre. The
proposed moves were then stored until the situation
turned into a potential near miss or collision. The
system monitored the developmnet of the situation
and would raise an alarm if a dangerous situation
(potential collision) was detected.
In the second case, n powered wheelchairs are
present (where n>1). The processing procedure was
similar to that for a single object. The difference was
that manoeuvres depended on the projected
movements of multiple wheelchairs rather than a
single one. If one of the powered wheelchairs
continued to get closer, then negotiation was
cancelled, and the system took control to avoid
collision. The use of a pseudo-collaborative approach
to negotiating evasive manoeuvres brought some
benefits. The negotiation algorithm classified
potential collisions as wheelchair-to-wheelchair
encounters. Within the system an exchange of the
result from calculations for both wheelchairs was
carried out. This prevented possible
misunderstandings in the assessment of wheelchair-
to-wheelchair encounters. That also enabled a distinct
classification into “Continue” or “Avoid”. As the
wheelchair kept moving forward, it became clear
whether each powered wheelchair should take a
proposed manoeuvre. This prevented
misunderstandings, human errors and reduced the
workload of the wheelchair user.
The system was tested in a number of simulations
and representative scenarios were generated to cover
different wheelchair-to-wheelchair, wheelchair-to-
people, and wheelchair-to-static-object encounters. In
addition, scenarios were extracted from real
wheelchair collision incidents during real world
testing. Iterative testing and development enabled
faster integration and validation. Besides testing in
simulation, a Bobcat II wheelchair was used to
perform practical tests. In a total of three tests, the
system was tested at different stages of development.
The general functionality of the features described
above was successfully tested and validated.
7 DISCUSSION AND
CONCLUSION
Concepts were created to support wheelchair users in
situations where a collision might occur. An
intelligent hazard assessment considered external
information such as No-Go areas, route information
and sensor inaccuracies. The intelligent prediction of
wheelchair behaviours enabled drivers to be warned
of potential collisions at an early stage. A function for
the evaluation of wheelchair encounters and the
cooperative negotiation of evasive manoeuvres
allowed intelligent collision avoidance. Concepts
were successfully tested and evaluated through
simulations, as well as practically with two
wheelchairs. Future work will consider more
affecting factors, especially reaction times and the
ISAIC 2022 - International Symposium on Automation, Information and Computing
102

delays, as well as ways of improving assisted driving
and modelling.
REFERENCES
Haddad, M., Sanders, D., 2020a Deep Learning architecture
to assist with steering a powered wheelchair, IEEE
Trans. Neur. Sys. Reh. 28 12 pp 2987-2994.
Haddad, M., Sanders, D., Ikwan, F., Thabet, M., Langner,
M., Gegov, A., 2020b Intelligent HMI and control for
steering a powered wheelchair using a Raspberry Pi
microcomputer, Proc. 2020 IEEE 10th International
Conference on Intelligent Systems-IS (Varna) pp 223-
228.
Haddad, M., Sanders, D., Langner, M., Ikwan, F.,
Tewkesbury, G., Gegov, A., 2020c Steering direction
for a powered-wheelchair using the Analytical
Hierarchy Process, Proc. IEEE 10th International
Conference on Intelligent Systems (Varna) pp 229-234.
Holdsworth, R., 2003 Autonomous In-Flight Planning to
replace pure Collision Avoidance for Free Flight
Aircraft using Automatic Dependent Surveillance
Broadcast, Swimburne University IMO (1996),
Resolution MSC.64 67 Adoption of New and Amended
Performance Standards, Int. Maritime Org.
Kamijo, S., Matsushita, Y,, Ikeuchi, K., Sakauchi, M., 2000
Traffic monitoring and accident detection at
intersections. IEEE Trans. Intell Transp Syst 1 2
pp108–118.
Montewka, J., Goerlandt, F., Kujala, P., 2012
Determination of collision criteria and causation factors
appropriate to a model for estimating the probability of
maritime accidents, Ocean Eng. 40 pp 50–61.
Sanders, D., Moore, A., Luk, B., 1991 A joint space
technique for real time robot path planning Proc. Fifth
Int’ Conf on Advanced Robotics, 1991. 'Robots in
Unstructured Environments', IEEE, pp 1683 – 1689.
Sanders, D., Jaques, M., Clothier, H., 1992a Geometric
modelling for real time flight simulator applications
Proc. IEE Colloquium on Advanced Flight Simulation.
IET Conference Publications, pp 4/1 - 4/6.
Sanders, D., Harris, P., Mazharsolook, E., 1992b Image
modelling in real time using spheres and simple
polyhedral Proc. H Schroder (ed.), International
Conference on Image Processing and its Applications
IET Conference Publications, pp 433 – 436.
Sanders, D., 1995 The modification of pre-planned
manipulator paths to improve the gross motions
associated with the pick and place task. Robotica 13 1
pp 77-85.
Sanders, D., Graham-Jones, J., Gegov, A., 2010a
Improving ability of tele-operators to complete
progressively more difficult mobile robot paths using
simple expert systems and ultrasonic sensors. Industrial
Robot: An International Journal 37 5 pp 431-440.
Sanders, D., Lambert, G., Graham-Jones, J., Tewkesbury,
G., Onuh, S., Ndzi, D., Ross, C., 2010b A robotic
welding system using image processing techniques and
a CAD model to provide information to a multi-
intelligent decision module, Assembly Autom 30 4 pp
323-332.
Sanders, D., Tewkesbury, G., Graham-Jones, J., 2011
Simple rules to modify pre-planned paths and improve
gross robot motions associated with pick & place
assembly tasks. Assembly Autom, 31 1 pp 69-78.
Sanders, D., Tewkesbury, G., Gegov, A 2015 Fast
transformations to provide simple geometric models of
moving objects. Intelligent robotics and applications,”
,Lecture notes in computer science 9244
Springer pp
604-617.
Sanders, D., 2017 Using self-reliance factors to decide how
to share control between human powered wheelchair
drivers and ultrasonic sensors, IEEE Trans Neur Sys
Rehab 25 8 pp 1221-1229.
Sanders, D., 2018 Non-model-based control of a wheeled
vehicle pulling two trailers to provide early powered
mobility and driving experiences, IEEE Trans Neur Sys
Rehab 26 1 pp 96-104.
Sanders, D., Haddadm M., Tewkesbury, G., Thabet, G.,
Omoarebun, P., Barker, T., 2020a Simple expert system
for intelligent control and HCI for a wheelchair fitted
with ultrasonic sensors, Proc. of the 2020 IEEE 10th
International Conference on Intelligent Systems
(Varna) pp 211-216.
Sanders, D., Haddad, M., Langner, M., Omoarebun, P.,
Chiverton, J., Hassan, M., Zhou, S., Vatchova, B.,
2020b Introducing time-delays to analyze driver
reaction times when using a powered wheelchair, Proc.
of SAI Intelligent Systems Conf (Amst) pp 559-570.
Steidel, M., 2019 Axel Hahn system – An Assistance
System for Collision Avoidance at Sea,” Proc. 18 th
International Conference on Computer and IT
Applications in the Maritime Industries Technische
Universität (Hamburg) pp 261-273.
Tam, C., Bucknall, R., 2010 Collision risk assessment for
ships. J. Marine Science and Technology 15 3 pp257–
273.
Van Iperen, E., 2015 Classifying Ship Encounters to
Monitor Traffic Safety on the North Sea from AIS Data,
TransNav. Int. J. Marine Navigation and Safety of Sea
Transportation 9 1 pp 51–58.
Xue, Y., Lee, B., Han, D., 2009 Automatic collision
avoidance of ships J. Eng. for the Maritime
Environment 223 1 pp 33–46.
Youssef, S., Kim, Y., Paik, J., Cheng, F., Kim, M., 2014
Hazard identification and probabilistic scenario
selection for ship-ship collision accidents, Int. J.
Maritime Eng 156 A1 pp 61–80.
Zhang, W., Goerlandt, F., Montewka, J., Kujala, P., 2015 A
method for detecting possible near miss ship collisions
from AIS data, Ocean Eng 107 pp 60–69.
An Assistance System for Collision Avoidance Using Context-Sensitive Prediction
103
