
An Error Detection and Tolerance Framework for Task Parallel
Applications on High Performance Computing Systems
Yanfei Fang
1
, Enming Dong
1
, Yanbing Li
1
, Qi Liu
1
, Fengbin Qi
1
and Peibing Du
2
1
National Research Center of Parallel Computer Engineering and Technology, Beijing 100190, China
2
Northwest Institute of Nuclear Technology, Xian 710024, China
Keywords: Error Detection, Fault Tolerance, High Performance Computing, Task Parallel Applications.
Abstract: With the high performance computing capability entering the E-level era, the computing scale of the system
reaches more than 10 million cores. The mean time between failures of the system is short, which brings great
challenges to the reliability of the system. Single processor failure is a common system failure. If the failure
can be detected by the system, system-level fault tolerance can be implemented, and fault tolerant processing
can be performed through technologies such as checkpoint rollback. However, there are single processor faults
that cannot be detected by the system. These faults are manifested as wrong operation results, which cannot
be detected by the system. To solve the above problems, an error detection and fault tolerance framework for
task parallel applications is proposed. The framework consists of three functions: dynamic task scheduling,
error detection, and fault tolerance. During the running process of task parallel applications, error detection is
actively initiate. When a node failure is detected, the failed node is discarded. And tasks assigned to the node
since the last checkpoint are reassigned to other healthy nodes. The experimental results show that the
framework can effectively detect node failures. The fault tolerance can be performed without interrupting the
operation of the project, effectively avoiding the time cost caused by the checkpoint rollback technology.
1 INTRODUCTION
With the increasing demand for high performance
computing systems in important fields such as
national defense, scientific research, and finance,
high performance computing technology has
developed rapidly, and the scale of parallel systems
has become increasingly large. However, with the
expansion of the system scale and the complexity of
the system design, the mean time between failure
(MTBF) of the system decreases gradually, which
brings serious challenges to the system reliability.
Error detection and fault tolerance are important
foundations for maintaining the reliability of high
performance computing systems. Error detection
plays a key role in fault management. Some common
system faults can be detected by hardware and
maintenance software, but some node faults cannot be
detected. If the system cannot detect the node
operation faults, once the node operation error occurs
during the application running process, it is likely to
affect the results of the entire project, especially for
large-scale parallel applications that need to run for
days or even weeks. Therefore, low-overhead error
detection and fault tolerance mechanisms can reduce
the impact of failures on parallel applications, and are
of great significance to improving the robustness,
performance, and system availability of parallel
applications.
The paper proposes a fault detection and fault
tolerance framework for task parallel applications.
The framework can regularly detect the health of
nodes, find fault nodes, and recycle and reassign tasks
on the nodes without interrupting the project, which
can greatly reduce fault tolerance cost.
2 RELATED WORKS
2.1 Fault Tolerance Technology
Fault tolerance technology mainly includes three
aspects: error detection, fault diagnosis and fault
recovery. Error detection and fault recovery are
related to the work of the paper.
Error detection can be divided into transient error
and permanent error detection. Transient error
detection and fault tolerance mainly relies on repeated
202
Fang, Y., Dong, E., Li, Y., Liu, Q., Qi, F. and Du, P.
An Error Detection and Tolerance Framework for Task Parallel Applications on High Performance Computing Systems.
DOI: 10.5220/0011917800003612
In Proceedings of the 3rd International Symposium on Automation, Information and Computing (ISAIC 2022), pages 202-208
ISBN: 978-989-758-622-4; ISSN: 2975-9463
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

execution and comparison. According to the
replicated objects, transient error detection
techniques during processing can be divided into
instruction-level, thread-level and application-level
fault tolerance.
EDDI (Oh et al., 2002) and SWIFT (Reis et al.,
2005) are typical representatives of instruction-level
fault tolerance, which copy the instructions in the
original program at compile time, and insert
comparison instructions at appropriate locations to
detect errors. Thread-level fault tolerance method,
like AR-SMT (Rotenberg E, 1999), SRT (Reinhardt
et al., 2000) and CRT (Mukherjee et al., 2002), etc.,
use more than two hardware threads or cores to
execute the same task. A specific cache is added to
the processor to store the execution results of the two
threads, to detect errors by comparing the execution
results. Application-level fault tolerance method, like
PLR (Shye A, et al., 2009), performs replication and
comparison at a higher software level, such as
copying a process into multiple redundant processes
for concurrent execution, and then comparing the
program output.
Permanent error detection techniques can be
divided into two categories. One is the hardware
module fault detection technology at the micro-
architecture layer, which is often used in the design
of reconfigurable processors. The other is the
detection of node faults in high performance systems.
Since the MTBF decreases sharply, the node faults
are common in the system.
However, repeated execution may cost too much
time, which is not adopted by high performance
computing applications. High performance
computing systems mainly screen node operation
errors based on the screening point program, and
screen out the wrong points in advance, but the
screening program cannot cover all subject situations,
and errors during applications execution cannot be
found.
Error recovery techniques can be divided into
two categories: forward error recovery and backward
error recovery.
Forward error recovery tries to correct the error
after the error is detected and continue to execute
forward without roll back to the state before the error
moment. Redundancy is the basic way to realize
forward error recovery. Three Modular Redundancy
(TMR) is a widely used FER technology, which uses
3 modules to perform the same operation, and then
selects the data through a majority voter at the output
to achieve fault tolerance, but this method requires 3
times the computing resources and the overhead is
large, so this method is generally not used in high
performance system.
Backward error recovery returns to the state
before the error occurred after an error is detected.
The widely used backward error recovery method is
checkpoint. According to the content of the storage
checkpoint, checkpoint technology can be divided
into system-level checkpoint and application-level
checkpoint technology (Bronevetsky et al., 2004;
Faisal et al., 2018). According to the medium of
storage checkpoint, it can be divided into disk-based
and diskless checkpoint technology (Chen, 2010;
Alshboul et al., 2019).
Usually, error detection and recovery techniques
are combined together to ensure the correctness of the
applications. A task-based parallel programming
model is proposed in (Wang et al., 2016), in which
work-stealing scheduling scheme supporting fault
tolerance is adopted to achieve dynamic load
balancing support fault tolerance.
2.2 Parallel Application Model and
Task Scheduling
Most parallel applications can be divided into two
categories: data parallelism and task parallelism. Task
parallel applications usually decompose the task into
many sub-tasks, divide the data set, and execute the
tasks and corresponding data in parallel on different
computing resources. Task parallel applications are
widely used in drug screening, genetic research,
cryptanalysis, nuclear simulation and other fields.
There is no correlation between subtasks, but the
calculation number of subtasks may vary
significantly. In large-scale environments, an
efficient load balancing mechanism is the key to
ensure application performance, and the results of
each subtask have an important impact on the overall
results of the project.
Corresponding to task parallel applications, task
division is divided into static division and dynamic
division (Mohit et al., 2019). In static division, each
computing node is statically divided into the same
number of tasks and executed separately. Dynamic
partitioningis to dynamically adjust the tasks of
computing resources according to the load of each
computing resource, including dynamic scheduling
with management nodes and task stealing (Dinan et
al., 2009), etc. In high performance computing,
dynamic task partitioning is generally used to enable
applications to more fully utilize computing
resources(He et al., 2016).
An Error Detection and Tolerance Framework for Task Parallel Applications on High Performance Computing Systems
203

3 THE ERROR DETECTION AND
FAULT TOLERANCE
FRAMEWORK
At present, high performance computing systems
mainly screen node operation errors based on the
screening point program, and screen out the wrong
points in advance, but this method has the following
shortcomings:1) The screening program cannot cover
all subject situations. 2) The screening program often
needs to run for a long time. The nodes cannot be
screened at all times, so some errors cannot be found
through screening.
In addition, the nodes of high performance
computer systems are interconnected through specific
hardware and high-speed networks. Most of the nodes
are homogeneous, and the node states have
similarities when performing computing tasks. In task
parallel applications, a typical mode is that each node
runs tasks independently, when all tasks are
completed, it communicates with other nodes to
complete the entire task cooperatively.
Based on the above characteristics of high
performance computing applications, an error
detection and fault tolerance framework for task
parallel applications is proposed for high
performance computing systems. The basic idea of
the framework is to use the dynamic task scheduling
feature to combine node screening with applications.
After a certain time interval, let the nodes in a fixed
area perform the same task, realize redundant
operations in the runtime phase, and carry out through
the reduction results. Correctness judgment is used to
detect whether there is a node failure. When a node
failure occurs, fault tolerance is performed by
recycling the tasks on the node and abandoning the
failed node.
3.1 Frame Structure
As shown in Figure 1, the framework first implements
the dynamic task scheduling module for task parallel
applications. On this basis, it implements the
functions of error detection and fault tolerance. Error
detection is mainly based on MPI messages. Fault
tolerance is supported by system components such as
the operating system and job management.
To achieve error detection and fault tolerance,
dynamic task scheduling must be implemented first
because:
1) Load balancing of large-scale high
performance computing systems is very important
and requires dynamic task scheduling;
2) Error detection needs to implement redundant
operations in the running phase, and for task parallel
applications, this redundancy can be achieved by
letting the computing nodes within a certain range
perform the same task, which can be done by assign
the same task to different nodes by the dynamic task
scheduling.
3) To achieve fault tolerance without interrupting
the project, a checkpoint recording mechanism, as
well as a task recovery and redistribution mechanism
are needed, which can be well supported by dynamic
task scheduling.
Figure 1: System Software Architecture of the Framework.
For applications running on high performance
computing systems, the framework implements task
scheduling, error detection, and fault tolerance. The
main processes are as follows:
Step1: Initialize. Divide all computing resources
into control nodes and computing nodes. Control
nodes initiate task scheduling, error detection and
fault tolerance.
Step2: Dynamic task scheduling. Control nodes
assign tasks, while computing nodes execute tasks
and report the completion of tasks.
Step3: Error detection. When the completed
tasks reach a certain number, the control node
initiates error detection. The computing nodes in a
certain area calculate the same task, and compare the
task results. If the results are correct, go to Step5. Else
if a node is found to be wrong, go to Step4;
Step4: Fault tolerance. Report fault node to job
management components and mark the faulty node.
Recycle the tasks executed after the last checkpoint in
the faulty node, and assign them to other healthy
nodes for execution.
Step5: Record the checkpoint. When it is
detected that all computing nodes are healthy and the
completed tasks reach a certain threshold, record the
checkpoint.
3.2 Dynamic Task Scheduling
The dynamic task scheduling module provides task
scheduling support for the framework. It adopts the
design idea of a partitioned hierarchical tree, as
shown in Figure 2. During initialization, all nodes
participating in the calculation are divided into
Task parallel applications
Dynamic
Task
Scheduling
Error detection and fault tolerance
Error detection Fault tolerance
Job management Operating system
ISAIC 2022 - International Symposium on Automation, Information and Computing
204
control nodes (root nodes) and operation nodes (leaf
nodes). In order to prevent a single control node from
intensively affecting performance, the hierarchical
idea is adopted, and the control nodes are divided into
a global master node and some regional master nodes.
The number of the regional master nodes is the same
to the number of the regions. The control node
performs task scheduling, and the leaf nodes perform
task operations. Node types are shown in table 1.
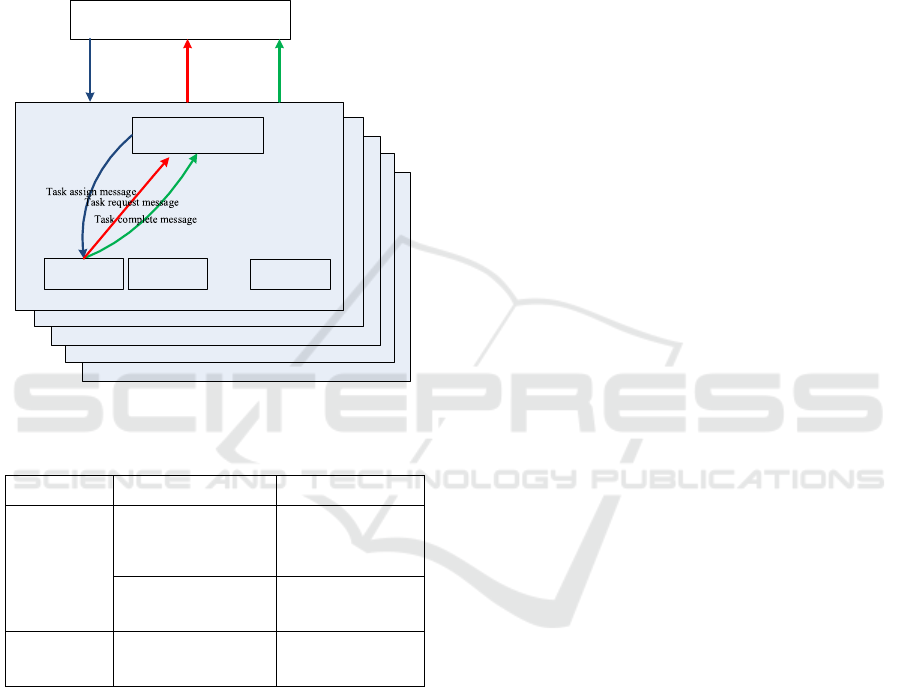
Figure 2: Diagram of dynamic task scheduling structure.
Table 1: Node types
Function t
yp
e Tree t
yp
e Node number
Control node Global master node
The first node of all
the computing
nodes
Regional master
nodes
The first node of
each region
Operation
nodes
Leaf node Nodes beside the
control node
Task scheduling is implemented based on MPI
messages. First, register the dynamic task message
type, which supports the following types of messages:
Task request message (TRM). When the non-
global master node finds that there are no tasks to be
completed locally, it sends a task request message to
the upper node, including the message request from
the leaf node to the regional master node, and the
message from the regional master node to the global
master node.
Task completion message (TCM). When the
non-global master node completes the task or task
package, it sends the task completion message to the
upper node, including the task completion message
from the leaf node to the regional master node and the
task completion message from the regional master
node to the global master node.
Task assignment message (TAM). When the
non-leaf node receives the task request message, it
will detect whether there are still tasks in the local
task pool, and if so, it will send the task assignment
message to the requester, including task assignment
message from the regional master node to the leaf
node and from the global master node to the regional
master node;
Task end message (TEM). When all tasks have
been completed, the global master node informs the
regional master nodes that the task is completed, and
the regional master nodes inform the leaf nodes that
the task is completed.
The main process of dynamic task scheduling is
as follows:
Step1. Initialize hierarchical environment.
Divide all computing resources into global master
nodes, regional master nodes and leaf nodes. The
global master node initializes the global task pool for
all tasks, the regional master node initial task pool is
empty, and the leaf nodes initially have no tasks.
Step2. Start the task application. The leaf node
detects that the task pool is empty and applies for the
tasks from the regional master node. After the
regional master node receives the task application
request, it checks that the regional task pool is empty,
and applies for the task from the global master node.
Step3. Start task allocation. After the global
master node receives the task request from the
regional master node, it allocates the task block to the
regional master node and records it. After the regional
master node receives the task block from the global
master node, it records it to the regional task pool and
records it, then assign tasks to leaf nodes.
Step4. Execute the tasks. After the leaf node
receives the task assignment from the regional master
node, it starts to execute the tasks.
Step5. Complete the execution and report. After
the leaf node completes the task, it reports to the
regional master node. After the regional master node
completes the task block, it reports to the global
master node, and the global master node updates the
task pool.
In the scheduling process, the task prefetching
strategy is adopted, so that the computing overhead
with the leaf nodes covers the message overhead of
the task request, which greatly improves the
performance of task scheduling.
3.3 Error Detection
The goal of error detection and fault tolerance is to
find faulty nodes in time, and to ensure that the
project continues to run correctly at the least cost.
Global master node
Regional master node
Task complete message
Leaf node Leaf node
Task assign message
Task request message
Leaf node
...
Region0
Regions
An Error Detection and Tolerance Framework for Task Parallel Applications on High Performance Computing Systems
205
Error detection and fault tolerance are combined
with dynamic task scheduling. First, a checkpoint
mechanism is introduced into the dynamic task
scheduling module. The checkpointing operation is
performed by the global master node, and a certain
threshold is set for the frequency of the checkpointing
operation. When the completed tasks reach the
threshold, the completed tasks are recorded. When an
inevitable error occurs in the program, fault tolerance
can be performed through checkpoints. Additional
message types for error detection need to be added,
including:
Initiate error detection (IED). IED is initiated
by the global master node. When the global master
node needs to update the breakpoint file, it sends an
error detection message to each regional master node;
Error detection completed (EDC). When the
regional master node receives the error detection
message sent by the global master node, it sends the
same task to all nodes in the region, and after reducing
the result, sends a detection completed message to the
global master node.
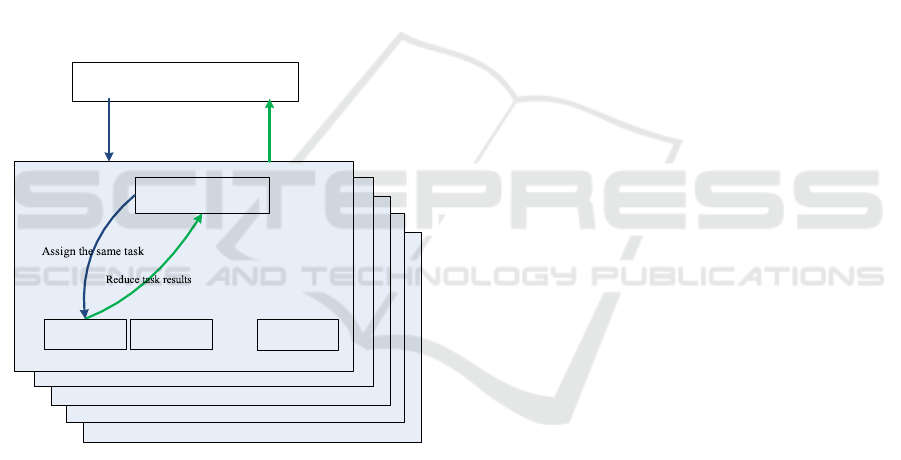
Global master node
Regional master node
Error detection complete
Leaf node Leaf node
Initiate error detection
Leaf node
...
Region0
Region
s
Figure 3. Diagram of error detection process
The mechanism of error detection function is
shown in Figure 3, which is divided into the following
steps.
Step1. Start error detection. Each time before the
checkpoint file needs to be updated, the global master
node sends an error detection message to the regional
master node.
Step2. Assign the same task to all the leaf nodes
in the same region. After receiving the error detection
message, the regional master node sends the same
task to the leaf nodes in the region.
Step3. Task execution. The leaf node executes the
task and records the result.
Step4. Reduce the execution results and check if
there exists error node in the region. The regional
master node reduces the task results of each leaf node,
checks all the results, and identifies whether there is
any error node. If an error node is found, it enters the
fault tolerance mechanism, otherwise it informs the
global master node that the nodes in the region are
healthy.
Step5. Finish error detection. After receiving the
health information of all regions, the global master
node starts to record the checkpoint file.
The reason why the detection is started before the
checkpoint is recorded is to detect whether there is
any node error between the last checkpoint record and
the current checkpoint record.
The cost of error detection is analysed below.
The average time of a single task is set to t, the total
task number is N, and the number of tasks to be
completed by each computing node when a
checkpoint is recorded is M. If the task execution of
nodes in the area is not synchronized, Because the
detection needs to perform a reduction operation, the
detection overhead is at most the time overhead of
two tasks, that is, the time overhead is at most 2Nt/M,
where M can be adjusted according to system
conditions.
3.4 Fault Tolerance
In order to achieve software fault tolerance, each node
will maintain a node status queue. Initially, all node
information is 0, indicating that the node is healthy.
When a node error is found, the information in the
status queue will be set to 1, indicating that the node
is faulty. When the faulty node is detected by the error
detection function, local fault tolerance and global
fault tolerance can be used for fault tolerance
according to the type of subject.
Local fault tolerance. If the faulty node will not
participate in global operations since the time the
error occurs, such as global protocol, global
synchronization, etc., local fault tolerance can be
used. The regional master node that detects the error
will notify the leaf nodes in the area.
Global fault tolerance. If the faulty node may
participate in global operations, such as global
protocol, global synchronization, etc., global fault
tolerance needs to be adopted. The regional master
node that detects the error will send a signal to the
operating system. The operating system will set the
node status to fault, and all other nodes are signalled
to be notified. After other nodes receive the signal,
they will set the status of the node in the node status
queue to fault, and all subsequent communication and
synchronization operations related to the faulty node
will be neglected.
The following describes the main steps of global
fault tolerance:
ISAIC 2022 - International Symposium on Automation, Information and Computing
206

Step1. Call operating system. After the regional
master node detects a node error, it calls the operating
system function interface to notify the operating
system of the faulty node information.
Step 2. Kick out the faulty nodes. After receiving
the faulty node information, the operating system
marks the faulty node, kicks it out of the job, and
sends a fault-tolerant signal to all the other healthy
nodes.
Step3. Mark the faulty node. After the healthy
node receives the signal from the operating system, it
updates the node status queue and marks the faulty
node.
Step4. Reassign tasks on the faulty node. The
regional master node reclaims all the tasks assigned
to the error node since the last update of the
breakpoint file and reassigns them. Then it sends the
detected exception message and the bitmap of the
reclaimed tasks to the global master node.
Step5. Update the bitmap of tasks. The global
master node starts the checkpoint file record after
updating the completed task information according to
the bitmap of the reclaimed tasks.
4 EXPERIMENTAL RESULTS
This section verifies the function and performance of
the proposed framework through experiments. The
main functions of the framework include task
scheduling, error detection and fault tolerance. Error
detection is mainly to detect operation errors that
cannot be detected by the system, so this experiment
mainly verifies the detection of such errors.
4.1 Experimental Verification
The experimental platform is the Sunway TaihuLight
supercomputer system (Dongarara, 2016). 64 CPUs
are used for testing. Each CPU contains 4 processes,
and each CPU has 64GB memory. The CPUs are
interconnected by a domestic network and can
communicate through MPI.
The experiment uses a task parallel application.
The total number of tasks N in the application can be
set from 2^13 to 2^15. The evaluation execution time
of each task is about 3 seconds. After each task is
completed, the task number and execution result will
be the output, and the execution result will be
reordered according to the task number. The rules for
reordering and deduplication are that, for all repeated
task results, the last output result is taken as the
correct result, and all other results are ignored.
The experimental method is as follows. First use
the correct node to execute the task using the static
task scheduling to generate the correct results. Then
sort the results by task number, and get the correct
result. Then execute the dynamic task scheduling
framework and get the result, sort the dynamic task
scheduling results. Compare the results, check the
correctness of the results, record the running time,
and check the performance. Then simulate node
errors, use the random node and random error mode,
enable error detection and fault tolerance, and reorder
all output results according to the task number.
Finally, the correct results are compared, the
correctness is checked, and the running time is
recorded.
Figure 4. Performance of the example application with
different CPU error numbers
4.2 Experimental Results and Analysis
First, the correctness of error detection and fault
tolerance is verified. When the error detection and
fault tolerance mode is turned on, 1, 2, 4, 6, and 8
CPUs are randomly selected to make random errors.
The scheduling results and correct results are
consistent, indicating that the error detection and fault
tolerance mechanism designed in this paper is
effective. After 1, 2, 4, 6, and 8 CPU errors occur, the
running time of the entire program for different total
task number N is shown in figure 4. With the increase
of faulty CPUs, the entire time cost of the program
increases gradually, and the increased time is
basically linear with the increase of the faulty CPU,
which indicates that the time overhead of fault
tolerance is very small, and the main overhead is the
reduction of computational resources.
Table 2 shows the time cost of dynamic task
scheduling using static task allocation, dynamic task
scheduling without error detection, and dynamic task
scheduling with different checkpoint frequencies(W)
with error detection enabled. The total task number is
2^13. Basically, after error detection is enabled,
because error detection starts after the checkpoint
update is initiated, the error detection frequencies
increase gradually as W increases. Correspondingly
An Error Detection and Tolerance Framework for Task Parallel Applications on High Performance Computing Systems
207

the time cost increases as W increases, and the time
of each error detection is about the time of 2 tasks.
Table 2. Performance of the example application with static
task scheduling(a), dynamic task scheduling without erro
r
detection(b), dynamic task scheduling without error
detection(c) on different
checkpoint frequencies (W).
a
b c
(
W=1/2^12)
c
(W=1/2^11)
c
(W=1/2^10)
Time
cost(s)
98.7
99.4 108.6 121.9 142.8
Gap(s) 0
0.7 9.2 13.3 20.9
Detection
times
0
0 2 4 8
5 CONCLUSIONS
As the core function of fault management, error
detection and fault tolerance are of great significance
to improve the reliability of the system. In this paper,
an error detection and fault tolerance framework is
proposed for task parallel applications on high
performance computing systems. The framework
realizes the error detection function by periodically
leading the computing nodes to perform the same
tasks and reducing the results. The error detection
time interval can be dynamically controlled according
to the environmental conditions. Fault tolerance is
realized without stopping the running applications,
which effectively reduces the time caused by
checkpoint. The experimental results verify the
effectiveness of the framework proposed in this
paper.
ACKNOWLEDGEMENTS
The work was supported by the National Science
Foundation of China (No. 61907034), National Key
R&D Program of China(2021YFB0301100).
REFERENCES
Alshboul, M , Elnawawy, H, Elkhouly, R, Kimura, K, &
Yan, S. (2019). Efficient checkpointing with recompute
scheme for non-volatile main memory. ACM
Transactions on Architecture and Code Optimization,
16(2), 1-27.
Bronevetsky G, Marques D, Pingali K, Szwed PK, Schulz
M. (2004). Application-Level checkpointing for shared
memory programs. In: Proc. of the 11th Int’l Conf. on
Architectural Support for Programming Languages
and Operating Systems. New York: ACM Press, 235-
247.
Chen Z. (2010). Adaptive checkpointing. Journal of
Communications, 5(1):81-87.
Dinan J., Larkins, D B , Sadayappan, P, Krishnamoorthy,
S, & Nieplocha, J. (2009). Scalable work stealing.
Conference on High Performance Computing
Networking (pp.1).
Dongarara J. (2016). Report on the Sunway TaihuLight
sytem:UT-EECs-16-742. Knoxville, USA: University of
Tennessee.
Faisal, Shahzad, Jonas, Thies, Moritz, & Kreutzer, et al.
(2018). Craft: a library for easier application-level
checkpoint/restart and automatic fault tolerance. IEEE
Transactions on Parallel and Distributed Systems.
He W, Wei D, Quan J, Wu Wei, Qi F(2016). Dynamic Task
Scheduling Model and Fault-Tolerant via Queuing
Theory. Journal of Computer Research and
Development 53(6): 1271-1280(in Chinese).
Mohit K, Sharma S.C., Anubhav G, Singh S.P.(2019). A
comprehensive survey for scheduling techniques in
cloud computing. Journal of Network and Computer
Applications, 143, 1-33.
Mukherjee SS, Kontz M, Reinhardt SK. (2002). Detailed
design and evaluation of redundant multithreading
alternatives. In: Skadron K, ed. Proc. of the 29th Annual
Int’l Symp. on Computer Architecture. Washington:
IEEE Computer Society, 99 - 110.
Oh N, Shirvani PP, McCluskey EJ. (2002). Error detection
by duplicated instructions in super-scalar processors.
IEEE Trans. on Reliability, 51(1):63 - 75.
Reinhardt SK, Mukherjee SS. (2000). Transient fault
detection via simultaneous multithreading. In:
Berenbaum A, ed. Proc. of the 27th Annual Int’l Symp.
on Computer Architecture. New York: ACM Press, 25-
36.
Reis GA, Chang J, Vachharajani N, Rangan R, August DI.
(2005). SWIFT: Software implemented fault tolerance.
In: Conte T, ed. Proc. of the Int’l Symp. on Code
Generation and Optimization. Washington: IEEE
Computer Society, 243- 254.
Rotenberg E. (1999). AR-SMT: A microarchitectural
approach to fault tolerance in microprocessors. In:
Proc. of the 29th Annual Int’l Symp. on Fault-Tolerant
Computing. Madison: IEEE, 84- 91.
Shye A, Blomstedt J, Moseley T, Reddi VJ, Connors DA.
(2009). PLR: A software approach to transient fault
tolerance for multicore architectures. IEEE Trans. on
Dependable and Secure Computing,6(2):135-148.
Wang YZ, Chen X, Ji WX, Su Y, Wang XJ, Shi F. (2016).
Task-Based parallel programming model supporting
fault tolerance. Ruan Jian Xue Bao/Journal of Software,
27(7):1789- 1804 (in Chinese).
ISAIC 2022 - International Symposium on Automation, Information and Computing
208
