
Platform-Pilot-Supervisor (PPS) when Mixed-Initiative Become Entity
Agnostic
Weifei Xie
1
, C
´
edric Herpson
1
, Christophe Cambier
2
and Jean-Marie Dembelle
3
1
Sorbonne Universit
´
e, CNRS, LIP6, F-75005 Paris, France
2
Sorbonne Universit
´
e, IRD, UCAD, UGB, UMI, UMMISCO, F-75006 Paris, France
3
Universit
´
e Gaston Berger de Saint-Louis, Laboratoire d’Analyse Num
´
erique et Informatique, BP.234 Saint Louis, Senegal
1
{firstname.lastname}@lip6.fr,
2
{firstname.lastname}@ird.fr,
3
{firstname.lastname}@ugb.edu.sn
Keywords:
Mixed Initiative, Autonomy, Design Phase.
Abstract:
Adaptive autonomy, adjustable autonomy or mixed initiative are introduced to allow the intelligent system to
cope with a dynamic environment. In these approaches, the system is allowed to change the level of autonomy
by itself or by an external actor. In this research, we introduce PPS, an analysis grid focused on the role of
the entities that compose a human-non-human team. It evaluates the genericity and collaboration capabilities
of existing architectures and mechanisms and can be used as a guide to design architectures covering all
collaboration configurations...
1 INTRODUCTION
Any collaboration between entities with a certain de-
gree of autonomy requires coordination. Whether
these entities intervene jointly or alternately, are hu-
man, non-human or a combination of the two makes
no difference. Indeed, every autonomous entity has
a certain capacity for initiative. This capacity can be
controlled or limited, either by the degree of auton-
omy the entity has in a given context (intrinsic limita-
tion), or by rules, norms or protocols of coordination
and interaction (extrinsic limitation). The challenge,
widely described in the literature, is to ensure that
teamwork brings more benefits than difficulties(C
ˆ
ot
´
e,
2013).
The various works that address these issues fall
under the concepts of Adjustable Autonomy(C
ˆ
ot
´
e,
2013), Adaptive Autonomy(Frasheri et al., 2018) and
Mixed-Initiative(Bevacqua et al., 2015). Intuitively,
the concept of Adjustable Autonomy introduces the
fact that the degree of autonomy of an entity can be
changed according to the situation or in response to
an event but does not make explicit who is respon-
sible for this change (the entity itself or an external
actor)(C
ˆ
ot
´
e, 2013). The concept of adaptive auton-
omy goes a step further and allows an entity to take
the initiative to vary its level of autonomy by itself,
and therefore the perimeter of its decisions (Frasheri
et al., 2018). In both cases, the better reactivity of the
system is achieved at the expense of the risk of error.
Work on mixed-initiative mainly focus on the ways
that allow different actors to intervene proactively in
the progress of a mission in order to guarantee its suc-
cess and maximise its performance. The degree of
autonomy of each entity and the definition of what
initiatives can be taken by them greatly influence the
performance of the teams.
However, despite the efforts of the community to
define a taxonomy (Frasheri et al., 2018; C
ˆ
ot
´
e, 2013;
Bevacqua et al., 2015) and clear perimeters for these
three concepts, there is no commonly accepted defini-
tion of each of its terms, many work that fall explicitly
within one of the above concepts have features that
overlap with the other two. Rather than focusing on
defining the boundaries between these domains, we
thought it would be interesting to look at the concept
that links them: the notion of role.
To place us not at the level of the pilot of the plat-
form but at the level of the roles – Pilot(s) and Super-
visor(s) – associated to the Platform(s) offers an anal-
ysis grid of existing approaches that allows to evalu-
ate both their genericity and their compatibility with
evolutions likely to be encountered. We refer here as
much about the direct uses of a platform as about its
integration within a larger system. In this work in
progress we introduce the proposed Platform-Pilot-
Supervisor (PPS) analysis grid and illustrate how it
could be use as a guide to design an architecture cov-
ering all collaboration configurations.
Xie, W., Herpson, C., Cambier, C. and Dembelle, J.
Platform-Pilot-Supervisor (PPS) when Mixed-Initiative Become Entity Agnostic.
DOI: 10.5220/0011961600003622
In Proceedings of the 1st International Conference on Cognitive Aircraft Systems (ICCAS 2022), pages 69-72
ISBN: 978-989-758-657-6
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
69
2 PLATFORM-PILOT-
SUPERVISOR APPROACH
The goal of a collaborative system is to achieve the
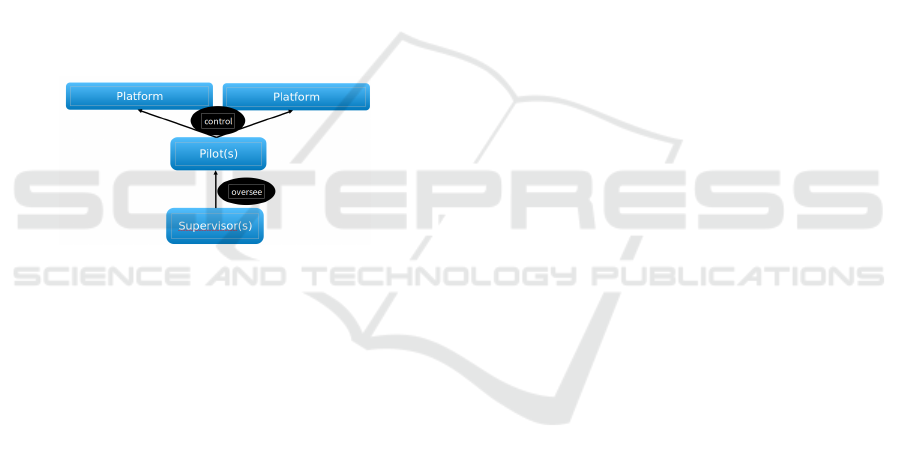
task given efficiently and safely. In our proposal (fig-
ure 1), the mission’s designer does not necessarily
determine offline the actors of each role. At a given
time, a platform is driven by an entity A which has
been given this role, and is supervised by an entity B
(potentially the same, but not necessarily) which has
been given a supervisory role. These roles can indif-
ferently and dynamically be entrusted to one or more
operators, human or artificial. And what is true for a
platform is also true for a set of – homogeneous or not
– platforms.
An entity is thus associated to a given set of roles ac-
cording to the current needs, estimated benefits and
capabilities available. An entity can be both the su-
pervisor and pilot of one or several platforms for the
whole mission, or linked to a given role for a certain
amount of time.
Figure 1: Illustration of platform-pilot-supervisor model.
In this system, any platforms (aerial, terrestrial, submarine,
subterranean) can be controlled by one or several operators,
human or IA, either alternatively or concurrently. The su-
pervisor role follow the same reasoning.
To ensure the performance of the system, several
requirement should be verified:
• Information Collection. Both pilots and super-
visors should be able to gather information with
an acceptable delay. The information the pilot(s)
require comes from both the supervisor and the
environment. The information the supervisors
should gather are related to the current pilots’ ca-
pabilities and the situational awareness.
• Communication. Both roles should be able to ex-
press their opinion, in case of conflict between the
two roles, the supervisor makes the decision. The
interaction must be able to evolve according to the
state of communication, for better or for worse.
• Ability of Analysis. Both roles need to be able
to analyse the information gathered within an ac-
ceptable time frame. In both cases, they must deal
with the noise and extract the essential informa-
tion. In the case of the pilot role, he must be able
to estimate the state of the platform. The super-
visor must be able to detect if the platform is in
danger and assess if the current entity(ies) assum-
ing the pilot role are adapted to the situation.
• Planning Ability. This is an essential ability
of both the pilot and supervisor roles. With the
knowledge of the platform-pilot state, the pilot
must be able to evaluate if it is able to cope with
the situation and if so, move on to the planning
of the movement (planning a sequence of actions
to perform the task). In the case of a necessary
re-planning, the pilot must insure that this could
be done under a given time-frame. The supervi-
sor must be able to determine if the pilot is able to
cope with this situation. The supervisor must also
be able to determine is it is necessary to change
the pilot by taking into account both the current
performance, the cost and risks of a role-change,
and the expected performance. Both decisions
must be explainable (in the case of a human, the
human must be able to justify itself, in the case of
an algorithm, the decision must be interpretable).
• Execution. The supervisor must have the ability
to execute decisions. Pilot must be able to ask for
help (transfer its role partially or fully) or execute
the planned actions.
• Knowledge. Both roles must be able to update
their knowledge to adapt their behaviour to un-
certainty, incompleteness and imprecision which
compose any real mission.
• Record: The system must be able to record all ac-
tions performed by any component of the triptych
– Platform(s), Pilot(s), Supervisor(s) – so that any
return of experience process could be realised.
2.1 Illustrative Examples
• Mono-platform. Unmanned Aerial Systems are
used in many warfare of civilian context : Ex-
ploration, surveillance and reconnaissance, search
and rescue,... Consider the case of one Option-
ally Piloted UAVs that should be used by a non-
expert user to complete surveillance missions. In
autonomous mode, the user takes on the role of
supervisor to ensure that the auto-pilot is follow-
ing the defined plan. When the human wants to
switch roles to become the remote-pilot, the user
takes on the role and the AI takes on the role of su-
pervisor. It keeps the capability to take over con-
trol in the eventuality that the user’s action puts
the drone in danger of crashing or of violating
flight rules. In the case of communication-losses
the (embedded) AI assumes both the pilot and su-
ICCAS 2022 - International Conference on Cognitive Aircraft Systems
70

pervisor roles. The advantage of allowing an AI to
take on the role of supervisor is that we can insure
that the safety level of the drone will be at least
the minimum between the safety levels of the hu-
man and of the AI.
In the case where the pilot role is shared between
several entities, for example an AI and a human,
the AI can take responsibility for a subset of ac-
tions so that the human can more easily manage
the platform. The AI can ensure that the quantity
of information transmitted to the human does not
overflow its processing capabilities and dynami-
cally adapt the tasks to its level of expertise.
• Multi-platform. The PPS approach can also be
used to describe multi-platforms configurations.
Consider multiple drones working together to find
an objective on a map. In the case of Optionally
Piloted UAVs, supervisors could be both embed-
ded humans or AIs. Once a point of interest is
founded, a human can take control of the closest
drone to specifically observe it, in this case he be-
comes the pilote of one platform, and the supervi-
sor of this OPUAV can be either a human or an AI
while the configuration can remain different for
the other components of the fleet.
3 RELATED WORK
As previously introduced, the 3 main concepts that
relates to the question of the autonomy of AI-Human
team and to collaboration between autonomous enti-
ties are Adaptive autonomy (ADA), Adjustable au-
tonomy (AJA) and Mixed initiative (MI). The 3 ap-
proaches are defined differently by different authors.
For (Singh, 2021), there is no difference between
ADA and AJA, and MI is a special case of ADA. In
the case of (Bevacqua et al., 2015) MI is restricted to
the case where a human and AI share the control of
a robot and the AI is the human assistant. In (Chanel
et al., 2020), MI means that each agent, human or not,
can seize the initiative, the role of each entity is de-
cided by its current capabilities. For (Frasheri et al.,
2018), ADA means that the AIs could adapt their au-
tonomy during the session by themselves. In this doc-
ument, we choose to follow the definitions proposed
by (Hardin and Goodrich, 2009) where the level of au-
tonomy, and thus the initiative capability of an AI, is
primarily controlled by the human in the AJA model
whereas the entity mainly controls its autonomy in
ADA. In this work, MI tries to define the coordina-
tion conditions between Human and artificial entities.
Table 1 synthesise the 6 basic configurations that
can be met when the focus on the roles instead of the
Table 1: Different roles configurations that should be con-
sidered with one unique platform: 1) Pilot and supervisor
are assumed by the same AI. 2)Pilot and supervisor are dif-
ferent AIs. 3)Human pilot with AI supervisor. 4) AI pi-
lot with human supervisor 5) Pilot and supervisor are one
unique Human 6) Pilot and supervisor are different Hu-
mans.
Supervisor
Pilot
AI Human
AI
1
2
3
Human 4
5
6
actors. At these configurations should be added the
cases where several entities are allowed to simultane-
ously collaborate to assume a given role.
The combination of theses modes cover the 3 pre-
viously introducted concepts. ADA, as presented in
(Abraham et al., 2021) can be presented with a combi-
nation of cases 1,4,5. The ADA perspective proposed
by (Frasheri et al., 2018) for the search and rescue
scenario can be presented as a combination of modes
1 and 3 while the (Rubio et al., 2004) model for path
planning restricted to the cases 1 and 2.
AJA generaly integrates a human supervision di-
mension. In the work of (C
ˆ
ot
´
e, 2013), the human may
choose to assist the system by providing information
about the waypoints or directly takes control, which
can be done by a combination of cases 1, 3 and 4.
The work of (Crandall and Goodrich, 2001) presents
a model that allows human integration in both high
and low autonomy level. Taking into account com-
munication delay, the supervision can be delegated to
the AI to avoid serious defects. This model cover the
cases 1,3,4.
The MI model can also be represented by the com-
bination of the basic modes. (Allen et al., 1999) pro-
pose a model in which each participant must con-
stantly monitor the situation to make the best deci-
sion. This model can be represented by a combination
of cases 1, 3, 4 and 5. (Adams et al., 2004) propose to
monitor the human state to achieve better cooperation,
this could represent a combination of cases 1,3,4,5.
The model proposed by (Bruemmer et al., 2003) can
be covered by the cases 1,3,4,5.
Some work also attempts to reduce the needs of
the human operator, with the aim of achieving full
autonomy. Their approach is also similar to ADA
or mixed initiative, such as the model proposed by
(Schwerd and Schulte, 2021) which be represented by
a combination of the cases 1, 3, 4 and 5.
The integrated guidance system in a multi-drone
system (Donath et al., 2010) can be represented by a
combination of modes 1,3,4,5. In other words, these
Platform-Pilot-Supervisor (PPS) when Mixed-Initiative Become Entity Agnostic
71

approaches attempt to build a system where humans
only play the role of supervisor, without the capacity
of pilot.
PPS allows to categorise existing approaches and
highlight the fact that several combination that make
sense operationally are forgotten. Allowing a super-
visor to not be a pilot or to call for different experts
during a given mission depending of situation to be
managed could improve the overall performance.
4 SYNTHESIS AND FUTURE
WORK
This paper introduce PPS, an analysis grid that fo-
cus on the roles of the entities that composes a team.
PPS allows to evaluate the genericity and collabora-
tion capabilities of existing architectures and mecha-
nisms that tries to improve the efficiency of team of
heterogeneous entities, either human or artificial. In
particular, PPS showed that there exist several use-
cases, either mono or multi platform, where a dynam-
ically changing supervisor could offer overall perfor-
mance improvements. In the near future, we will pro-
pose and instantiate a management architecture that
will cover the different cases described by PPS on a
mono-uav surveillance set-up before extending it to
multi-platform use-cases.
REFERENCES
Abraham, S., Carmichael, Z., Banerjee, S., VidalMata,
R., Agrawal, A., Islam, M. N. A., Scheirer, W., and
Cleland-Huang, J. (2021). Adaptive Autonomy in
Human-on-the-Loop Vision-Based Robotics Systems.
arXiv:2103.15053 [cs]. arXiv: 2103.15053.
Adams, J. A., Rani, P., and Sarkar, N. (2004). Mixed-
Initiative Interaction and Robotic Systems. page 8.
Allen, J., Guinn, C., and Horvtz, E. (1999). Mixed-initiative
interaction. IEEE Intelligent Systems and their Appli-
cations, 14(5):14–23. Conference Name: IEEE Intel-
ligent Systems and their Applications.
Bevacqua, G., Cacace, J., Finzi, A., and Lippiello, V.
(2015). Mixed-Initiative Planning and Execution
for Multiple Drones in Search and Rescue Missions.
page 9.
Bruemmer, D., Marble, J., Dudenhoeffer, D., Anderson, M.,
and McKay, M. (2003). Mixed-initiative control for
remote characterization of hazardous environments.
In 36th Annual Hawaii International Conference on
System Sciences, 2003. Proceedings of the, page 9 pp.,
Big Island, HI, USA. IEEE.
Chanel, C. P. C., Roy, R. N., Drougard, N., and Dehais, F.
(2020). Mixed-Initiative Human-Automated Agents
Teaming: Towards a Flexible Cooperation Frame-
work. In Harris, D. and Li, W.-C., editors, Engi-
neering Psychology and Cognitive Ergonomics. Cog-
nition and Design, Lecture Notes in Computer Sci-
ence, pages 117–133, Cham. sc.
Crandall, J. and Goodrich, M. (2001). Experiments in
adjustable autonomy. In 2001 IEEE International
Conference on Systems, Man and Cybernetics. e-
Systems and e-Man for Cybernetics in Cyberspace
(Cat.No.01CH37236), volume 3, pages 1624–1629,
Tucson, AZ, USA. IEEE.
C
ˆ
ot
´
e, N. (2013). Raisonnement et d
´
ecision mixte pour
l’autonomie ajustable et le partage d’autorit
´
e. The-
ses, Universit
´
e de Caen.
Donath, D., Rauschert, A., and Schulte, A. (2010). Cogni-
tive assistant system concept for multi-UAV guidance
using human operator behaviour models. page 16.
Frasheri, M., Curuklu, B., Esktrom, M., and Papadopoulos,
A. V. (2018). Adaptive Autonomy in a Search and
Rescue Scenario. In 2018 IEEE 12th International
Conference on Self-Adaptive and Self-Organizing Sys-
tems (SASO), pages 150–155, Trento, Italy. IEEE.
Hardin, B. and Goodrich, M. A. (2009). On Using Mixed-
Initiative Control: A Perspective for Managing Large-
Scale Robotic Teams. page 8.
Rubio, J. C., Vagners, J., and Rysdyk, R. (2004). Adaptive
Path Planning for Autonomous UAV Oceanic Search
Missions. In AIAA 1st Intelligent Systems Technical
Conference, Chicago, Illinois. American Institute of
Aeronautics and Astronautics.
Schwerd, S. and Schulte, A. (2021). Operator State Es-
timation to Enable Adaptive Assistance in Manned-
Unmanned-Teaming. Cognitive Systems Research,
67:73–83.
Singh, G. (2021). Enhancing manned unmanned teaming
with physiological computing and adaptive interac-
tion. These de doctorat, Toulouse, ISAE.
ICCAS 2022 - International Conference on Cognitive Aircraft Systems
72
