
Machine Learning for Drone Conflict Prediction: Simulation Results
Brian Hilburn
a
Center for Human Performance Research, Amsterdam, The Netherlands
Keywords: Machine Learning, Drone, Urban Air Mobility.
Abstract: Introducing drones into urban airspace poses several air traffic management (ATM) challenges. Among these
is how to monitor and de-conflict (potentially high-density / low predictability) drone traffic. This task might
exceed the capabilities of the current (human-based) air traffic control system. One potential solution lies in
the use of Machine Learning (ML) to predict drone conflicts. This study explored via low-fidelity offline
simulations the potential benefits of ML for drone conflict prediction, specifically: how well can a simple ML
model predict on the basis of instantaneous traffic pattern snapshot, whether that pattern will result in an
eventual airspace conflict? Secondly, how is model performance impacted by such parameters as traffic level,
traffic predictability, and ‘look-ahead’ time of the model?
Using a deep learning neural network approach, this study experimentally manipulated traffic load, traffic
predictability, and look-ahead time. Using limited trajectory data (aircraft state) and a limited neural network
architecture, results demonstrated (especially with structured traffic) large potential ML benefits on airspace
conflict prediction. Binary classification accuracy generally exceeded 90%, and error under the most
demanding scenarios tended toward false positive (i.e. incorrectly predicting a conflict). The current work is
abstracted from Hilburn (2020), which provides further detail.
1 INTRODUCTION
The possible introduction of drone traffic into urban
airspace has many in the air traffic management
(ATM) community wondering how to accommodate
such a fundamentally new type of aircraft, whose
potential numbers and unpredictability might
overwhelm current human-based methods for
managing air traffic (Duvall et al., 2019; European
Union, 2016). One possible solution lies in the use of
Machine Learning (ML) techniques for predicting
(and possibly resolving) drone conflicts in high
density airspace.
The aim of this research was not to develop an
optimised ML model per se, but to experimentally
explore via low-fidelity offline simulations the
potential benefits of ML for drone conflict prediction,
specifically: how well can a simple ML model predict
on the basis of instantaneous traffic pattern snapshot,
whether that pattern will result in an eventual airspace
conflict (defined as entry into a stationary prohibited
zone)?
a
https://orcid.org/0000-0001-8585-5902
Secondly, how is model performance impacted by
such parameters as traffic level, traffic predictability,
and ‘look-ahead’ time of the model?
2 METHOD
2.1 Airspace and Traffic Assumptions
This effort started from several assumptions. First
was the focus on the ‘edge case,’ or worst-case
scenario. If ML were able to predict conflicts under
the most challenging possible assumptions, real
world results would likely be better. For reasons of
this analysis, traffic assumptions therefore included
the following (TERRA, 2019):
• Urban Air Mobility (UAM) scenario —
envisions short flight times, and frequent
trajectory changes;
• High traffic density—this is implicit in
predicted future urban drone scenarios, but we
intended to push the limits of traffic level;
Hilburn, B.
Machine Learning for Drone Conflict Prediction: Simulation Results.
DOI: 10.5220/0011963700003622
In Proceedings of the 1st International Conference on Cognitive Aircraft Systems (ICCAS 2022), pages 77-82
ISBN: 978-989-758-657-6
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
77
• Lack of intent information—no flight plan
information (regarding filed destination,
speed, altitude, heading changes, etc) would
be available. Instead, only the minimal
(instantaneous) state information would be
provided;
• Random drone movements—ML conflict
prediction would be trivial if all drone
movements were completely predictable. In
reality, VLL drone operations will have a fair
amount of structure and determinism.
However, we intentionally introduced a high
level of randomness in drone movements,
again to test the worst case scenario for ML;
• Prohibited airspace— was represented as
static no-go regions (e.g, around security
sensitive areas). This analysis included a
single, static “no drone zone,” and conflicts
were defined as penetrations of this zone.
2.2 Methodological Assumptions
This effort set out to test ML conflict prediction using
the most challenged methods. Specifically, this meant
that whatever ML model we used, must have no
ability to look either forward or backward in time, nor
make use of any other information beyond the simple
instantaneous state of each drone. For research
purposes, the conflict prediction problem was
simplified to one of pattern recognition. We used a
supervised learning approach, and in particular a
fairly limited architecture: the standard deep learning
(i.e., multi hidden layer) artificial neural net. Whereas
enhancements to the neural net approach (including
RNN, CNN, and LSTM enhancements) would be
expected to show better time series processing and
thus better classification performance, we set out to
use a simpler neural net architecture, to establish
baseline worst case model performance. Moreover,
we set out to train different models (36 in all) so that
model performance could be compared
experimentally, to assess the impact of traffic level,
traffic randomness, and look-ahead window range, on
ML conflict prediction performance.
2.3 Test Scenarios and Traffic Samples
The urban drone environment was represented by a
20 x 20 grid of 400 total cells. Each cell was either
occupied or empty. Developmental testing
established the number and size of restricted areas, so
as to produce a reasonable number of Prohibited Zone
(PZ) incursions. It was decided to use a single,
stationary PZ, as shown in 1. One simplifying
assumption was that altitude was disregarded, and
drone movements were only considered in two
dimensions (the PZ was assumed to be from the
surface upward). Second, there were no speed
differences between drones. Finally, conflicts were
only defined as airspace incursions into the PZ, not as
losses of separation between drones (drones were
assumed to maintain vertical separation).
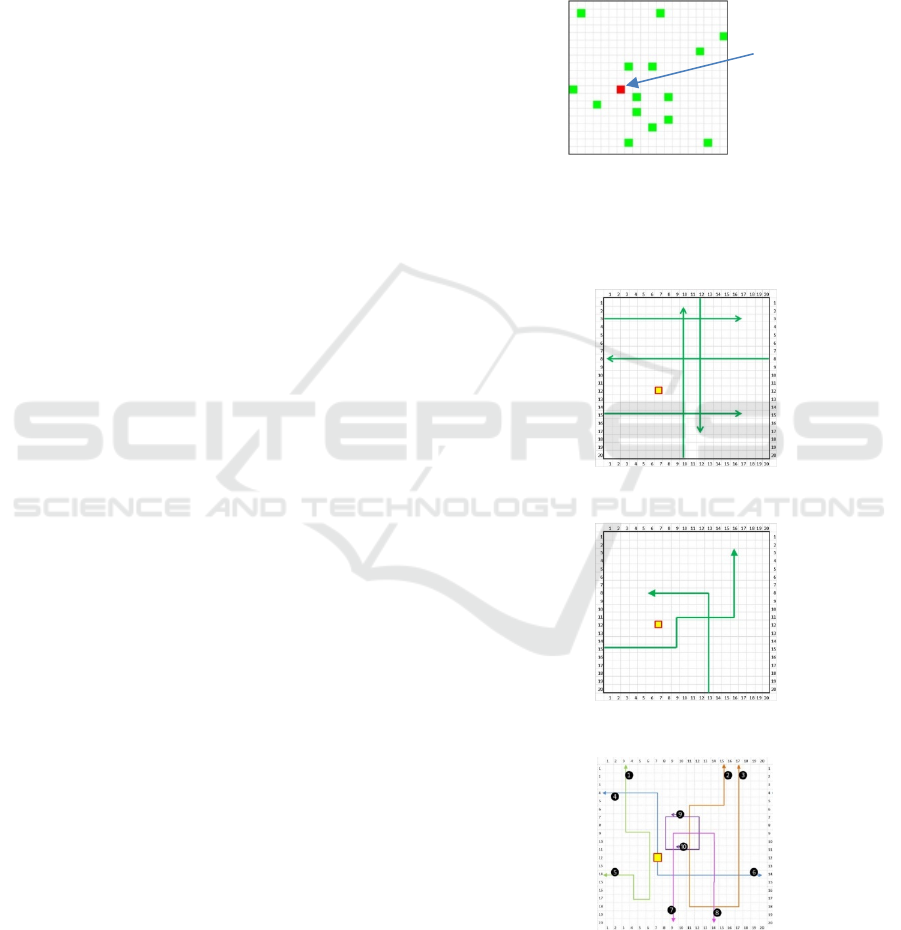
Figure 1: Snapshot, traffic sample of 16 birthed drones
(note PZ).
Traffic samples were built from three different kinds
of drone routes, as shown in Figure 2.
(a) Through-routes.
(b) TCP-routes.
(c) Bus-routes.
Figure 2: The three types of drone routes.
Notice that drones could only fly on cardinal
headings (North, South, East, or West). Through-
PZ
ICCAS 2022 - International Conference on Cognitive Aircraft Systems
78

routes transited the sector without any heading
change. TCP-routes (i.e. Trajectory Change Point
routes) added probabilistic heading changes to
through-routes. After a random interval of 3-6 steps,
TCP-route drones would either continue straight
ahead, or make a 90° left/right heading change. The
random TCP function was nominally weighted to
50% no heading change (i.e. continue straight ahead),
25% left turn, and 25% right turn. Finally, the ten
possible Bus-routes (5 routes, flown in either
direction) were pre-defined TCP trajectories. Bus-
route drones all entered the sector after sample start
time, except for bus-routes 9 and 10 (which flew a
square pattern in the centre of the sector, and were
birthed already on their route).
As discussed later, analysis compared “random”
and “structured” route conditions, as an experimental
manipulation. The random condition used TCP-
routes exclusively. The structured condition used a
random combination of through-routes and bus-
routes.
Each traffic sample consisted of 40 time steps.
First appearance of each drone was randomly timed
to occur between steps 1 and 15. Each drone
maintained current heading by advancing one cell per
time step (no hovering). This meant that a through-
route drone would transit the sector in 20 steps. Each
traffic sample also consisted of 4, 8, or 16 birthed
drones (this was also an experimental manipulation,
as described later). Because birth time was
randomized, the actual number of instantaneous in-
sector drones could vary.
Analysis used a 3x2x2 experimental design and
varied the following factors:
• Aircraft count (4 vs 8 vs 16)— the total
number of birthed aircraft;
• Look-ahead time (Low vs High)— Snapshot
time, in number of steps before conflict;
• Traffic structure (Low vs High)—
Randomised vs semi-structured traffic flows.
2.4 Neural Network Design
Neural network modelling was done in
NeuralDesigner v2.9, a machine learning toolbox for
predictive analytics and data mining, built on the
Open NN library. Modelling used a 400.3.1
architecture (i.e., 400 input nodes, a single hidden
layer of 3 nodes, and a single binary output node),
with standard feedforward and back propagation
mechanisms, and a logistic activation function. Each
of the 400 total cells was represented as an input node
to the network. Each input node was simply coded on
the basis of occupation, i.e. a given cell was either
occupied (1) or empty (0). The output node of the
ANN was simply whether the traffic pattern evolved
into an eventual conflict (0/1). Maximum training
iterations with each batch was set to 1000.
2.5 Procedures
The overall flow of the traffic generation, pre-
processing, and ANN modelling process is shown in
Figure 3. Using a traffic generation tool, preliminary
batches of 5000 traffic samples each were created.
Separate batches were created for each combination
of aircraft count and structure level. For each batch,
samples were then automatically processed to
identify conflict versus non-conflict outcomes,
extract multiple look-ahead snapshots (for 1-6 steps)
from conflict samples, and extract matching yoked
snapshots from non-conflict samples. Target outputs
were then labelled, and sample groups were fused into
a final batch file. This batch file was then randomly
split 60/40 into training and testing sub batch files.
After training each of the 36 networks with its
appropriate training sub batch file, each network was
tested on its ability to classify the corresponding test
sub batch file.
Figure 3: Overview, traffic creation and model testing
procedure.
3 RESULTS
3.1 Binary Classification Accuracy
The simplest performance measure is classification
accuracy. That is, what percentage of samples was
correctly classified as either conflict or no conflict?
The ANN models each had a simple binary output:
either an eventual conflict was predicted, or was not.
This is a classic example of a binary classification
task, which is characterized by two ‘states of the
world’ and two possible predicted states. A binary
classification table, as shown in Figure 4, allows us to
identify four outcomes: True Positive (TP), True
Negative (TN), False Positive (FP), and False
Negative (FN). According to Signal Detection Theory
Machine Learning for Drone Conflict Prediction: Simulation Results
79

(Green & Swets, 1966), these outcomes are referred
to, respectively, as: Hits, Correct Rejections, False
Alarms, and Misses.
Figure 4: Binary classification outcomes.
These four classification outcomes allow us to define
the following rates:
• Accuracy— the rate of proper classification,
defined as: ACC = [TP+TN] /
[TP+FN+TN+FP]
• Error Rate = 1-ACC = [FN+FP] /
[TP+FN+TN+FP]
• True Positive Rate (aka sensitivity) = TP /
[TP+FN]
• True Negative Rate (aka specificity) = TN /
[TN+FP]
For structured traffic, there seemed to be a ceiling
effect on classification performance. Classification
accuracy approached optimum (falling no lower than
.948) regardless of traffic or look-ahead time. This
means that, with structured traffic, the ANN model
was able to predict almost perfectly which traffic
samples would result in conflict. This was not
surprising. As discussed earlier, under structured
traffic the majority (84%) of drones would be
predictable by the second step after sector entry. By
step 3, the only uncertainty would be whether the
other 16% were on through-routes or bus-routes.
Random traffic, however, showed some variations
in model performance. Classification performance
with random traffic was still impressively high,
ranging from .72 to .98, and generally well above
chance levels. However, under random traffic we
began to see ML performance declines with both
look-ahead time and traffic count (classification
performance worsened with each), and a trend toward
a three-way interaction between traffic, structure, and
look-ahead.
Figure 5 shows the effect of both look-ahead and
aircraft count, on overall classification accuracy. Data
are somewhat collapsed in this view. Look-ahead (1-
6) is binary split into Low (1-3) and High (4-6).
Aircraft count includes only the extremes of 4 and 16.
Besides a main effect of both look-ahead (longer
look-ahead worsened performance) and aircraft count
(higher count worsened performance), there is a slight
trend toward a look-ahead x aircraft count interaction.
Notice the interaction trend, whereby longer look-
ahead had a greater cost under high traffic.
Figure 5: Effect of aircraft count and look-ahead on overall
classification performance, random traffic only.
3.2 Sensitivity and Specificity
For a finer-grained view, see the three panels of
Figure 6. These present classification performance
under random traffic, for low, medium, and high
aircraft count (from left to right panel). Each panel
also shows the impact of look-ahead, from 1-6 steps.
Figure 6: Classification performance, sensitivity, and
specificity, for random traffic (low to high, top to bottom).
ICCAS 2022 - International Conference on Cognitive Aircraft Systems
80

Notice that the pattern of Sensitivity (the TPR)
and Specificity (TNR) vary by aircraft count.
Basically, ML overall performance worsened with
look-ahead time, but the underlying patterns (TPR,
TNR) differed by aircraft count. For low traffic,
Sensitivity fell disproportionately (i.e., the model
tended toward FN rather than FP). For high traffic,
Specificity fell (the system tended toward FP rather
than FN). At the highest level, this interaction trend
suggests that the ANN model tended to
disproportionately false positive under the most
demanding traffic samples.
3.3 The Extreme Scenario
To test one final, and even more challenging case,
we generated traffic and trained / tested an ANN
model, using random traffic, 24 aircraft, and a look-
ahead of 6 (see Figure ).
Figure 7: The extreme scenario: 24 drones, random traffic,
and a six-step look-ahead.
Classification accuracy remained surprisingly high in
this condition (in fact, slightly above the 16 drone
sample). Also, this extreme scenario extended the
trend toward Specificity decrement seen in the three
panels of Figure 6.
Table 1: Results summary, binary classification
performance, extreme scenario.
Classification accuracy 0.739
Error rate 0.261
Sensitivity (TP) 0.705
Specificity (TN) 0.758
False Positive Rate (FP) 0.242
False Negative Rate (FN) 0.295
3.4 Summary of Results
In terms of conflict prediction performance, results
from our ML model can be summarized as follows:
• With structured traffic, overall model
performance was nearly perfect;
• With structured traffic, no effect of traffic
count nor look-ahead could be found;
• For random traffic, the model still performed
quite well;
• For random traffic, traffic count and (more so)
look-ahead had a clear impact on overall
classification accuracy;
• This look-ahead effect on accuracy revealed
subtle differences in other parameters. For low
traffic, Sensitivity (TP rate) declined more
than did Specificity (TN rate). For high traffic,
this was reversed, In other words, longer look-
ahead worsened overall classification
performance, but low traffic was biased
toward false negatives, and high traffic was
biased toward false positives;
• Even under the most challenging conditions
(random, high traffic, long look-ahead), ML
classification accuracy was still fairly high
(76.5%);
• Even with random traffic, classification
performance was generally well above
guessing level, far better than chance;
• The ANN approach continued to show robust
classification performance, even when
presented an extreme case of 24 drones,
random traffic, and long look-ahead.
4 CONCLUSIONS
Even with minimal data (i.e., nothing more than
instantaneous traffic snapshot), and a limited neural
network architecture (without any explicit time series
processing capability), neural network modelling
demonstrated potential benefits in predicting and
classifying drone trajectories in the urban
environment. We would expect ML methods, once
deployed, to show even better performance, for two
main reasons.
First, and as noted elsewhere, advanced ML
methods exist that can make better use of memory,
time series processing, time delays, and memory
erase functions. Static ANNs, which are limited in
their ability to handle time series data, have clear
limitations in predicting dynamic air traffic patterns.
Related ML methods such as recurrent neural
Machine Learning for Drone Conflict Prediction: Simulation Results
81

networks, convolutional neural networks, time delay
neural networks, and long short term memory would
all likely show better predictive performance.
Second, ML would presumably perform better
with meaningful real world data, rather than
stochastically generated flights. The neural network
approach (as with all ML methods) assumes that there
are some underlying patterns in the data which the
network can uncover. However, the pattern and
structure in our generated traffic were fairly low level.
For example, our use of standard bus-route
trajectories added some regularity to drone traffic
movements. Nonetheless, this is a fairly shallow level
of pattern and meaning. As an analogy, think of actual
bus routes, that might run between residential and
employment centres. The route itself is one level of
pattern, but the direction and timing of movements
also have some deeper meaning (to bring people to
work at one time, and home at another). In our traffic
sample, it is as if the buses run on the proper fixed
routes, but are launched at random times and in
random directions. Our paradox is therefore: how
well can we assess machine learning for actual drone
patterns, before there are actual drone patterns?
Presumably, machine learning will do better once we
have meaningful real-world data on drone traffic
patterns, rather than randomly generated samples.
In summary, this analysis intentionally used
limited data, and simple architectures, to enable
experimental control over factors related to
classification. Despite these limitations, neural
network modelling provided encouraging first
evidence that ML methods can be very useful in
helping predict conflicts in the urban drone scenario.
ACKNOWLEDGEMENTS
This research was conducted with support from the
European Union’s Horizon 2020 research and
innovation programme, under the umbrella of the
SESAR Joint Undertaking (SJU).
REFERENCES
Duvall, T., Green, A., Langstaff, M. & Miele, K. (2019).
Air Mobility Solutions: What They’ll Need to Take Off.
McKinsey Capital Projects & Infrastructure, February.
European Union (2016). European Drones Outlook Study.
SESAR Joint Undertaking. November.
Green, D.M. & Swets, J.A. (1966). Signal Detection Theory
and Psychophysics. New York: Wiley.
Hilburn, B. (2020). An Experimental Exploration of
Machine Deep Learning for Drone Conflict Prediction.
In Tsihrintzis, G.A. & Jain, L. (Eds.). Machine
Learning Paradigms: Advances in Theory and
Applications of Deep Learning. Springer.
TERRA (2019). UAS requirements for different business
cases and VFR and other stakeholders derived
requirements. SESAR Horizon 2020 programme,
Technological European Research for RPAS in ATM
(TERRA) project, Deliverable 3.1.
ICCAS 2022 - International Conference on Cognitive Aircraft Systems
82
