
Practical Validation on Simulation of Multi Dobot Magician
Trajectory Contour Tracking
P. Anggraeni
a
, W. A. Candra
b
, A. S. Sunarya
c
and D. Safitri
Manufacture Automation And Mechatronics Engineering Dept., Bandung Polytechnic for Manufacture, Jl.Kanyakan 21,
Bandung, Indonesia
Keywords: Manipulator, Contour Tracking, ROS, Cooperative Control.
Abstract: Manipulators are arm-like robots that have been widely used in the industry to perform repetitive work usually
performed by humans. The growing number of distributed control systems currently used by some modern
industries is evident by research on cooperative control systems (CCS) where multiple entities is two or more
things to achieve the same goal. A multi-agent system consists of many autonomous agents that can interact
with each other or with their environment. The advantages of multi-agents system compared to single-agents
are tasks that are performed more efficiently and increase the value of tolerance and flexibility in the execution
of tasks. There is a problem that is doing research to prove the advantages of the system in manipulator robots.
In this final task, a cooperative control system is performed on the manipulator robot, which is control of three
manipulator robots in a group using virtual reality simulation with leader-follower concept. The manipulator
that used is Dobot Magician which is a multifunctional robot arm for academic purposes. The platform used
is Robot Operating System (ROS) and the simulator used is Gazebo. The results of this study are the
realization of robot control through virtual reality, PID tuning with Ziegler-Nichols analysis method, precision
value of each robot when performing compound control, as well as proofed by end-effector position value of
all three manipulator robots. So the conclusion of cooperative control systems can be realized on the robot
arm and the resulting precision value can prove the effectiveness of the robot in operation.
1 INTRODUCTION
Robot is defined according to the Robot Institute
America (RIA) as a multifunctional manipulator that
can be reprogrammed and designed to move
materials, tools, parts or special devices through
programmed movement variables to perform various
tasks to help humans.
Md Rasedul Islam conducted research Cartesian
trajectory based on Dobot robot control. Thing
developed in this research, namely: use of DH
Parameters and algebraic approach back kinematics.
The controller used is PID, simulation is carried out
in the Simulink environment in where the dynamic
model of Dobot is simulated for follow the common
space and space trajectory Cartesian. The results of
this study are in the form of developing forward
kinematics and reverse kinematics of the Dobot robot
a
https://orcid.org/0000-0003-1986-272X
b
https://orcid.org/0000-0003-0888-6363
c
https://orcid.org/0000-0001-9509-0325
Magician. In this study the PID controller used to gain
joint base control Dobot Magician robot (Md Rasedul
Islam, 2019).
Qingsong Ai conducted research on the
implementation of Dobot Magician's robotic arm
trajectory control using the trajectory planning
method. The results of this study show that the robot
arm can write and draw correctly, and the upper
computer interface of the control system can display
the actual position of the arm tip in the real-time
writing process, which has real-time stability and is
good (Ai, Yang, Li, Feng, & Meng, 2018).
S Hernandez describes a concept of a Multi-
master ROS system to present a multi-robot network
system with each roscore node. This platform can
generally be applied to both mobile robots and
manipulator robots. In the ROS framework itself,
there is already a solution regarding the system,
Anggraeni, P., Candra, W., Sunarya, A. and Safitri, D.
Practical Validation on Simulation of Multi Dobot Magician Trajectory Contour Tracking.
DOI: 10.5220/0011973200003575
In Proceedings of the 5th International Conference on Applied Science and Technology on Engineering Science (iCAST-ES 2022), pages 965-970
ISBN: 978-989-758-619-4; ISSN: 2975-8246
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
965
namely multimaster_fkie which can build a ROS
Network system configuration that involves two or
more network devices (Juan, 2015) (Anggraeni,
Defoort, Djemai, & Zuo, 2019).
Lehman (2015) explained about the introduction
of the kinematics of mobile robots and manipulators
using the features and tools found in the Robot
Operating System (ROS). This study describes the
kinematics used, such as inverse kinematics, forward
kinematics, and DH Parameters that utilize the ROS
feature (Yousuf, 2015).
The increasing prevalence of distributed control
systems that are currently used by several modern
industries, as evidenced by research on Cooperative
Control Systems (CCS) where several entities, both
two or more, do something to achieve the same goal.
A multi-agent system is a system consisting of many
autonomous agents that can interact with each other
or with their environment. An example of a
cooperative control system is a fleet of unmanned
autonomous vehicles with a general purpose, such as
reaching a target location. For example, automated
forklifts can self-regulate to provide efficient service
to machines on the warehouse floor (Monostori, et al.,
2015) (Defoort, Floquet, & Kokosy, 2008).
The advantages of a multi-agent system compared
to single-agent is tasks performed more efficiently
and improve tolerance value and flexibility in
implementation task. Based on these conclusions,
then a problem arises, namely doing research to prove
the superiority of the system on the manipulator
robot. Robots that The robot arm used is Dobot
Magician. In addition, this study used PID . control as
an end-effector position control on the robot arm.
Thus, this study able to do contour tracking using
ROS (Robot Operating System) and end-effector
position control using a leader-follower topology.
Controller PID is used on the leader robot
(Anggraeni, Defoort, Djemai, & Zuo, 2019) (Defoort,
Polyakov, Demesure, Djemai, & Veluvolu, 2015).
The rest of this paper is organized as follows. The
second section describes the mechanical specification
design of Dobot Arm manipulator robot. While Robot
Operating System (ROS) Simulator is discussed in
the third section. The fourth section addresses the
implementation validation and results. Finally, we
conclude the article in the fifth section.
2 ROBOTIC ARM
MANIPULATOR
In this section, description of Dobot Magician and
Robot Operating System (ROS) are presented to the
best illustrate the simulator.
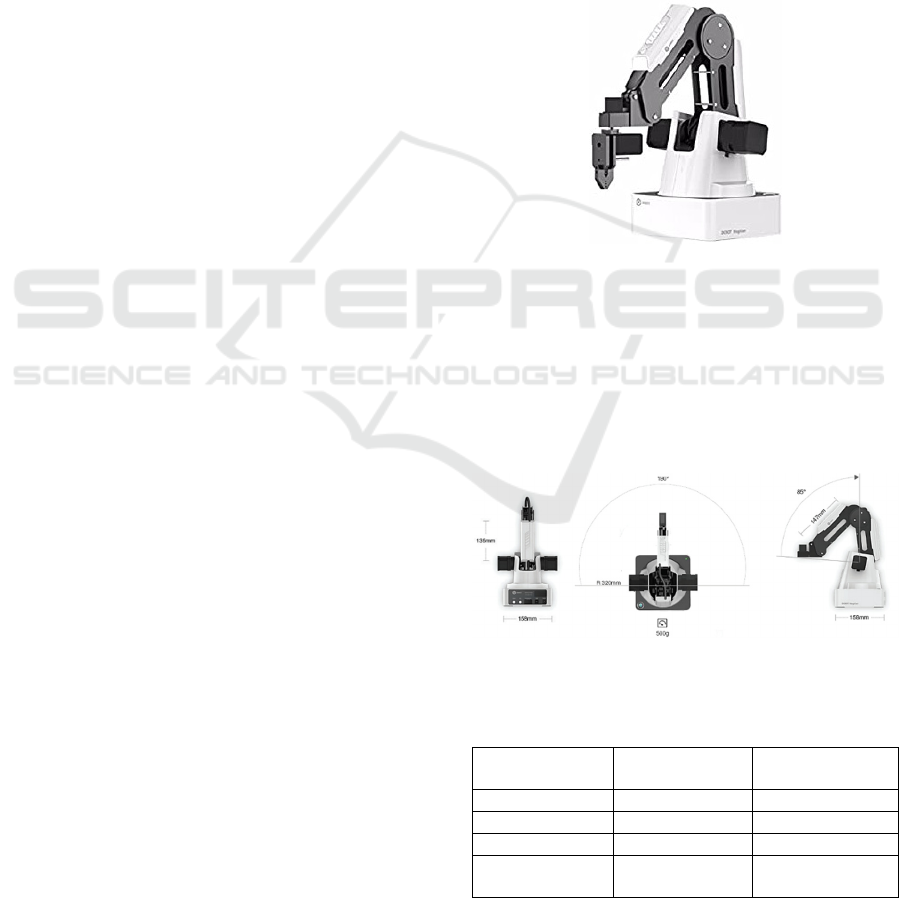
2.1 Robotic Arm Dobot Magician
The robotic arm Dobot is a 3 DoF robot that has three
stepper motors to actuate its joints (base, shoulder and
elbow) as shown in Figure 1. The basic specification
of robotic arm Dobot are shown in Figure 22.
Figure 1: Dobot Arm Robot.
The payload capacity of Dobot’s end effector is
500 gram. The end-effector uses a servo motor and a
pneumatic pump to deal with payload. The maximum
distance that can be reached by Dobot is 320 mm. It
can work under the temperature range -10°C to 60°C.
The range of motion and maximum speed of each
joints are shown in Table 1.
Figure 2: Dimension of Dobot Arm Robot.
Table 1: The Range of Motion and Max Speed of Each
Joint.
Axis Range
Max Speed
(250
g
workload)
Joint 1 base -135° to +135° 320° /s
Joint 2 rear ar
m
0° to +85° 320° /s
Joint 3 fore arm -10° to +95° 320° /s
Joint 4 rotation
servo
+90° to -90° 480° /s
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
966
3 ROS-BASED SIMULATOR
The manipulator system simulator is developed based
on the open source ROS environment. The simulator
is called ROS Gazebo.
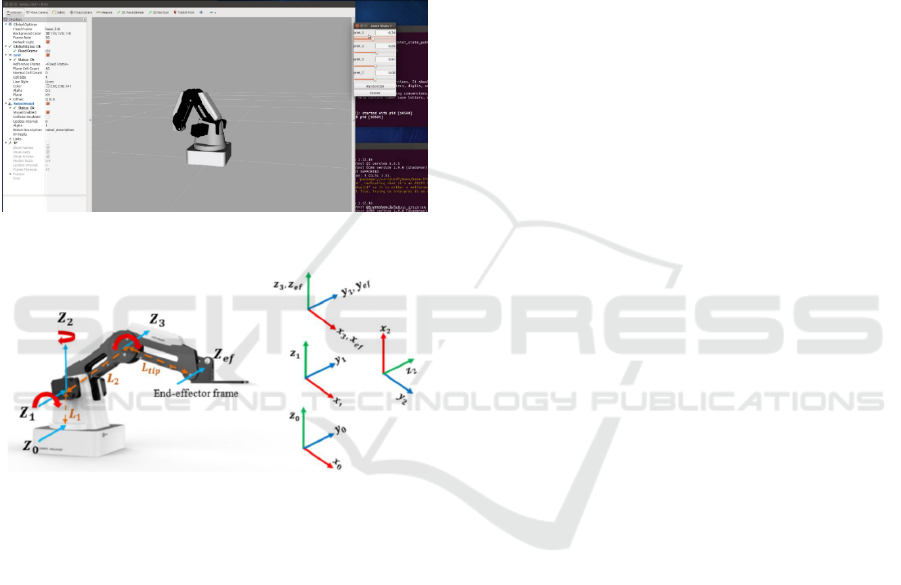
3.1 System Modelling and Description
This section describes multi robots model inside ROS
Gazebo Simulator. First Dobot Arm Robot profile
must be set up as showed below and all model
description stated in URDF,
Figure 3: Dobot profile in Gazebo Simulator.
Figure 4: Dobot coordinate Frame.
3.2 Multi-Robotic Arm Manipulator
Communication
To perform multi-robot movements, it requires a
Multi-master ROS as a system capable of running
Roscore more than two network devices. To use
multimaster_fkie it is necessary to perform the
installation on robot package in the following way:
git clone
https://github.com/fkie/multimaster_fki
e.git multimaster
rosdep update
rosdep install -i --as-root pip:false -
-reinstall --from-paths multimaster
In order for multimaster_fkie to be used, the mini-
PC must have pre-installed Grpcio-tools.
Multimaster_fkie consists of two nodes that are
executed master_discovery and master_sync. In
general master_discovery send a multicast message to
the network so that other ROS masters respond to
other ROS masters and examine the local roscore for
changes in the local network, and tell all other Master
ROS in the public network this change.
Then, master_sync serves to process the
information provided for the master_discovery node
to register the topic and service to the local roscore.
Information provided by the master_discovery node
is also used to update information about topic and
service. So it can be configured to select hosts, topics
and services to use or ignore. By default all the topic
and service of all hosts are synchronized, so as to
reduce the bandwidth needed to synchronize various
topic and service (Hock & Šedo, 2017).
$export ROS_MASTER_URI=http://<host
ip>:11311
ROS_MASTER_URI to determine which IP host
will be the MASTER of its network. To launch
package multimaster_fkie that need to be done is to
do roscore first on each mini-PC.
$roscore
Then, launch the master_discovery node on each
mini-PC by using the multicast _mcast_group
argument.
$rosrun fkie_master_discovery
master_discovery
_mcast_group:=224.0.0.1
After launching master_discovery followed by a
multicast sync that was covered by launching the
master_sync node.
$rosrun fkie_master_sync master_sync
After performing synchronization on each of the
mini-PCs, the master checks that have been included
in the list_masters.
Practical Validation on Simulation of Multi Dobot Magician Trajectory Contour Tracking
967
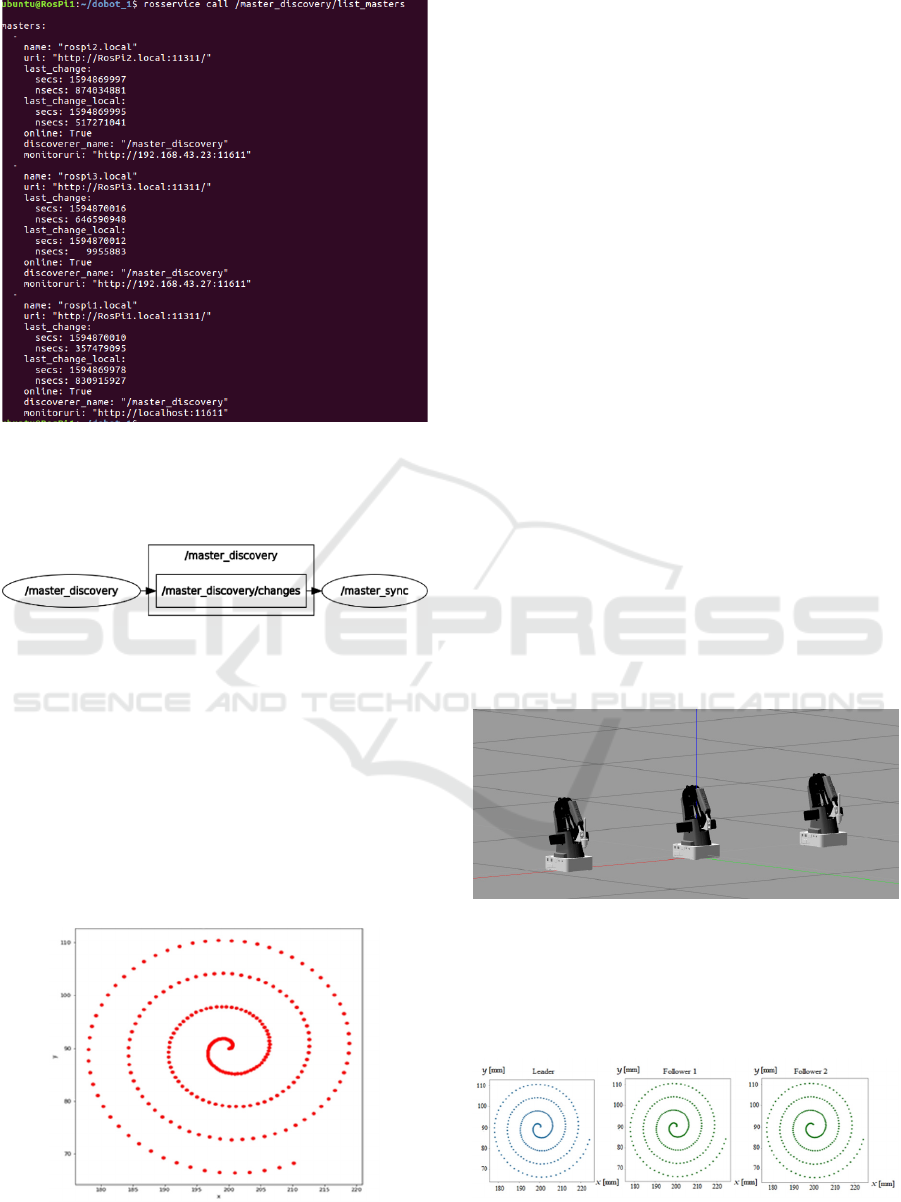
Figure 5: Multi Master Lists.
Here is the result of the Rqt-graph on ROS Multi-
master:
Figure 6: Rqt-Graph of Multimaster.
This rqt-graph shows the communication network
established for multi robot application.
3.3 Robotic Arm Manipulator Contour
Trajectory
The contour tracking involved follower 1 and
follower 2. The executed followers is a topic that
accepts positions based on the orders sent by the
leader. Figure 7 shows a chart of contour trajectory:
Figure 7: Calculation of publisher movement in xy graph.
Followers track the spiral contour tracking
utilizing the X and Y coordinates. While Z is in static
condition. The following is the calculation of the
movement:
𝑥
𝑙𝑡
𝑋 cos
𝑡
200
𝑦
𝑙𝑡
sin𝑡 90
𝑧30
(1)
The value of t is a change or time increase. In this
case t increased by about 0.1 seconds so that if done
rosbag file or recorded data, then it can be seen that
the increase of time is followed by the subsequent
movements.
Leader (Dobot 1) defined the contour trajectory
and send the information of trajectory to follower 1
(Dobot 2) and follower 2 (Dobot 3). In order for the
Masters of follower 1 and follower 2 to receive the
information of trajectory from Leader, the use of ROS
Multi-Master for Leader, follower 1 and follower 2 is
connected to each other. Multi-robot contour
trajectory has been conducted using Multi-Master
ROS system.
4 IMPLEMENTATION
VALIDATIONAND RESULTS
The simulation is a movement of a robot using a
kinematics program for the 3 DoF robots and a new
Gazebo movement limited to the joint movement.
Figure 8: Simulation of Multiple Dobot.
Controlling the robot arm with PID tuning
produces an ideal wave signal and the resulting value
is the position value of the end-effector robot based
on the coordinates achieved.
Figure 9: Lead-Follower Contour Tracking.
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
968
The following are the results of the movement of
the three robots with Dobot 1 as the master which
produces a certain contour trajectory, while Dobot 2
and Dobot 3 as followers follow the contour.
Table below shows the movement precision of
each robot with X
1
, X
2
, X
3
as Dobot 1, Dobot 2 and
Dobot 2 movement in X axis respectively. As well as
Y
1
, Y
2
, Y
3
as Dobot 1, Dobot 2 and Dobot 3
movement in Y axis respectively.
Table 2: Precision Result in percentage (%) of Robot
Movement.
T(s) X
1
Y
1
X
2
Y
2
X
3
Y
3
0
0,085
0,390
0,083
0,315
0,049
0,371
0.1
0,074
0,417
0,064
0,335
0,062
0,390
0.2
0,060
0,434
0,090
0,347
0,106
0,401
0.3
0,043
0,442
0,128
0,350
0,172
0,402
0.4
0,025
0,439
0,187
0,346
0,240
0,394
Avg
0,058
0,424
0,110
0,339
0,125
0,392
Based on the data presented below, it is concluded
that by using PID, the movement of the arm joint of
the Dobot Magician robot is smoother but takes
longer to reach steady state. It can be seen from the 1
axis Y joint, using PID control, the resulting system
response is ideal. And if you pay attention to the three
curves in one graph, robot 1 precedes the two robots
that act as followers.
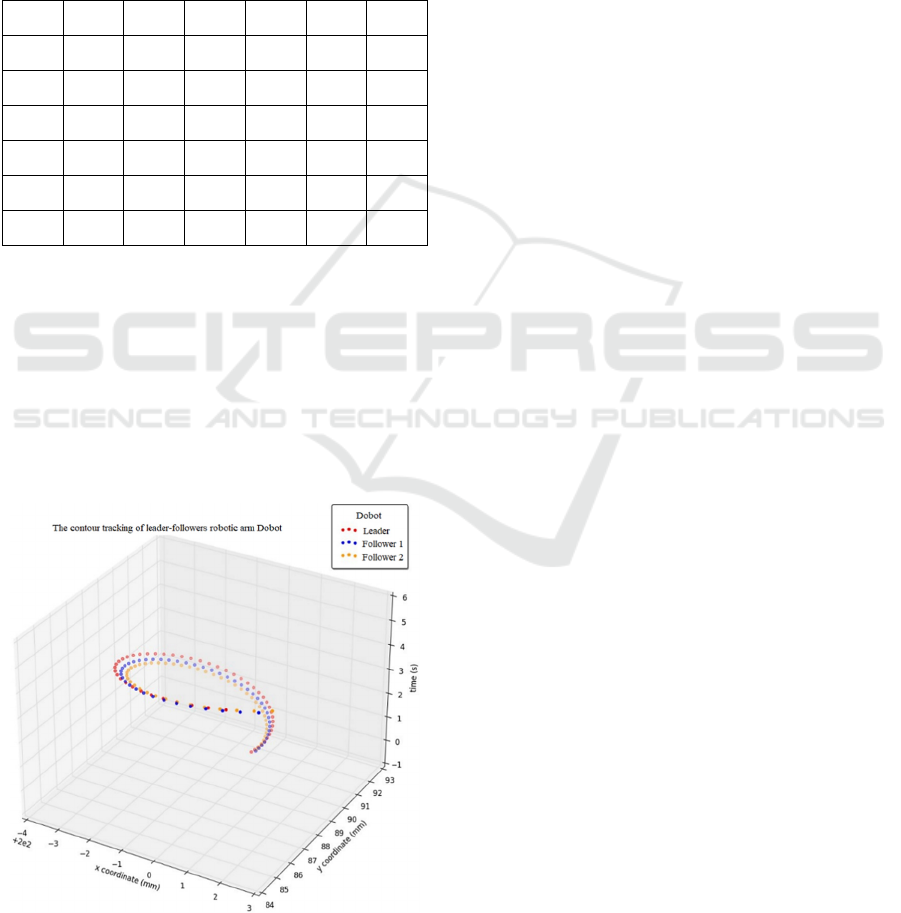
And the 3D contour tracking for all robots show
as follow:
Figure 10: Lead-Follower 3D Contour Tracking.
5 CONCLUSIONS
The application of the Multi-Agent on the Dobot
Magician robot arm produces movement with the
concept of a leader-follower and the positioning
accuracy and effectiveness in carrying out the work is
precise as long as the movement carried out is still
within the scope of the work area of the Dobot
Magician robotic arm.
To control the robotic arm of Dobot Magician, the
simulator used is the Gazebo Sim. So that the physical
dynamics of the robot is also taken into account. The
end-effector conditions in URDF are dummy or fixed.
The precision of the end-effector position on the
Dobot Magician robot arm when doing contour
tracking, it can be concluded that Robot 1 has a
precision of 0.057% at the X coordinate and 0.42% at
the Y coordinate, Robot 2 has a precision of 0.11% at
the X coordinate and 0.424% at the Y-coordinate
0.338%, and then Robot 3 to its precision of 0.1257%
at the X-coordinate and 0.39% at the Y-coordinate.
ACKNOWLEDGEMENTS
This work has been supported by Laboratory of
Robotic, Automation Engineering Technology and
Mechatronics Department, Bandung Polytechnic for
Manufacture under the Polman Bandung Internal
Research Project.
REFERENCES
Ai, Q., Yang, Q., Li, M., Feng, X., & Meng, W. (2018).
Implementing Multi-DOF Trajectory Tracking Control
System for Robotic Arm Experimental Platform. 2018
10th International Conference on Measuring
Technology and Mechatronics Automation (ICMTMA)
(pp. 282-285). Changsha, China: IEEE.
Anggraeni, P., Candra, W. A., Defoort, M., & Djemai, M.
(2019). Experimental Implementation of Fixed-Time
Leader-Follower Axial Alignment Tracking. 2019
International Conference on Mechatronics, Robotics
and Systems Engineering (MoRSE) (pp. 86-91). Bali:
IEEE.
Anggraeni, P., Defoort, M., Djemai, M., & Zuo, Z. (2019).
Control strategy for fixed-time leader–follower
consensus for multi-agent systems with chained-form
dynamics. Nonlinear Dynamics, 2693–2705.
Defoort, M., Floquet, T., & Kokosy, A. (2008). Sliding-
mode formation control for cooperative autonomous
mobile robots. IEEE Transactions on Industrial
Electronics, 3944-3953.
Practical Validation on Simulation of Multi Dobot Magician Trajectory Contour Tracking
969

Defoort, M., Polyakov, A., Demesure, G., Djemai, M., &
Veluvolu, K. (2015). Leader-follower fixed-time
consensus for multi-agent systems with unknown non-
linear inherent dynamics. IET Control Theory &
Applications, 2165-2170.
Hock, O., & Šedo, J. (2017). Forward and Inverse
Kinematics Using Pseudoinverse and Transposition
Method for Robotic Arm DOBOT. In E. G. Hurtado,
Kinematics (pp. 75-94). Rijeka: Intech.
Juan, S. H. (2015). Multi-master ros systems. Barcelona,
Spain: Institut de Robotics and Industrial Informatics.
Md Rasedul Islam, M. A.-u.-Z. (2019). Cartesian
Trajectory Based Control of Dobot Robot. Proceedings
of the International Conference on Industrial
Engineering and Operations Management Toronto (pp.
1507-1517). Toronto: IEOM Society International.
Monostori, L., Valckenaers, P., Dolgui, A., Panetto, H.,
Brdys, M., & Csáji, B. C. (2015). Cooperative Control
in Production and Logistics. Annu. Rev. Control, 12-29.
Yousuf, A. L. (2015). Introducing kinematics with robot
operating system (ROS). 2015 ASEE Annual
Conference & Exposition (pp. 26.1024.1 - 26.1024.18).
Seatle, Washington: ASEE.
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
970
