
Automatic Soft Gripper Implementation on Foods Using Machine
Vision
Suharyadi Pancono, Wahyu Adhie Candra and Andi Muhammad Aqil
Department of Automation and Mechatronics Engineering, Bandung Polytechnic of Manufacturing, Bandung, Indonesia
Keywords: Deformable Food Handling, Soft Gripper, Pick and Place, Object Identification.
Abstract: The rigid frame of conventional robots makes the food industry still need a lot of human involvement. Soft
gripper is created as one of the solutions for food handling automation system. Various studies have developed
a variety of soft grippers in food pick-and-place process. The gripper with 2 finger configurations showing
better performance compared to the gripper with single finger configuration because it can handle more
diverse object, but the configuration of the fingers is still selected and changed manually. This study proposed
a method to automatically selecting and changing the finger configuration. This study developed 4-finger soft
gripper with a conversion mechanism for 2 finger configurations. The finger configuration is selected based
on the object’s length-to-width ratio that calculated using machine vision. Canny edge detection method is
used to detect edge contours from the object’s image. The results obtained in this study show that the finger
configuration conversion mechanism on the soft gripper made has good repeatability performance, the length-
to-width ratio measurement using machine vision has accuracy up to 97,81% compared to manual
measurement, and food pick-and-place experiment with 100% success rate.
1 INTRODUCTION
Traditional rigid end-effectors are used widely on
automatic production lines, which can perform lots of
repetitive lifting operations. However, it is difficult
for them to handle small, fragile, and deformable
objects due to its bulky and rigid body (Zhong et al.,
2019). Therefore, handling deformable objects such
as foods still need a lot of human involvement. To
reduce labor cost, food handling automation systems
are highly demanded by food industry (Zhongkui
Wang et al., 2016).
Soft grippers replaced rigid body on conventional
robots with a structure made of elastic materials that
deform continuously in response to the interaction
with the objects. Soft grippers are able to
continuously vary their shape without requiring
complex multi-joint mechanisms, have the potential
to provide greater adaptability while presenting lower
costs, simpler structures, and simpler control
algorithms than hard end-effectors. Soft grippers can
be categorized into three groups based on grasping
principle: gripping by actuation, gripping by
controlled stiffness, and gripping by controlled
adhesion. The most suitable group for fruit handling
are the first group because of large lifting capabilities,
good response time, and have the highest techonology
readiness level compared to the other groups (Navas
et al., 2021; Shintake et al., 2018).
Various studies have developed a variety of soft
grippers. The results show that 3 and 4-finger soft
grippers with static finger configuration only capable
to lift up spherical objects (Minh Dang et al., 2021;
Zhangkui Wang et al., 2018; Zhongkui Wang et al.,
2016; Zhongkui Wang, Zhu, et al., 2017). To handle
more diverse object, several studies developed 4-
finger soft gripper with 2 finger configurations
(Zhongkui Wang et al., 2020; Zhongkui Wang,
Torigoe, et al., 2017). Compared to grippers with
static finger configuration, soft gripper with 2 finger
configurations successfully handle spherical and
elongated objects, but the finger configuration on the
mentioned study is still selected and changed
manually.
This study proposed a method to automatically
selecting and changing the finger configuration. This
study developed a 4-finger soft gripper with
conversion mechanism for 2 finger configurations.
The object’s shape tendency is affected by its
elongation factor. Elongation factor (EF) is defined as
the ratio of the longest segment within an object to the
mean length of the perpendicular segment (Patel et
Pancono, S., Candra, W. and Aqil, A.
Automatic Soft Gripper Implementation on Foods Using Machine Vision.
DOI: 10.5220/0011973700003575
In Proceedings of the 5th International Conference on Applied Science and Technology on Engineering Science (iCAST-ES 2022), pages 971-975
ISBN: 978-989-758-619-4; ISSN: 2975-8246
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
971

al., 2021). The finger configuration is selected based
on the object’s EF that calculated using machine
vision. Before calculating the EF, the edge contours
from the object’s image is traced using Canny edge
detection method.
2 SYSTEM OVERVIEW
Image from the object is captured using webcam. The
webcam send the data to the laptop for digital image
processing to estimate the object’s EF and selecting
the suitable finger configuration. Then the laptop
send the command to the controller based on the
selected finger configuration via serial
communication. Next, the controller sends PWM
signal to the servos and trigger signal to arm robot’s
I/O port. Servo’s shaft rotation will physically
determine finger configuration and actuate the fingers
on the soft gripper. Soft gripper attached to arm robot
and will perform pick-and-place sequence together.
Figure 1: System overview.
3 IMPLEMENTATION
3.1 Soft Gripper with Conversion
Mechanism
Soft gripper in this study is created using 3D Print
method. The body parts are created using PLA
filament with 25% infill and 1,2mm wall thickness.
The finger parts are created using TPU filament with
10% infill and 0,8mm wall thickness. The mechanical
construction of the soft gripper is refer to reference
(Mishra et al., 2017) with modifications.
Figure 2: Soft grippers CAD Model
<
Rotary base is rotatable to provide 2 finger
configurations as illustrated on figure 3.
(a) (b)
Figure 3: (a) Perpendicular and (b) Parallel finger
configurations on the gripper.
Perpendicular configuration used for spherical
objects while parallel configuration used for
elongated objects. Commonly used finger model for
“gripping by actuation” soft grippers are pneumatics
(Minh Dang et al., 2021; Zhangkui Wang et al., 2018;
Zhongkui Wang et al., 2016; Zhongkui Wang, Zhu, et
al., 2017; Zhong et al., 2019) and tendon-driven
(Gafer et al., 2020; Hussain et al., 2021; Mishra et al.,
2017). Tendon-driven actuation model is used on the
gripper in this study because it needs less component
and easier to produce than the pneumatics model, also
the pneumatics model is susceptible for leakage in the
air chamber (N. Tan et al., 2018; Zaidi et al., 2021).
Two servo motors set on the gripper. The first one
is TowerPro MG90S located on the lower base and
used to rotate the rotary base. Another servo is
TowerPro MG995 located on the upper base and used
to pull the wire for finger actuation.
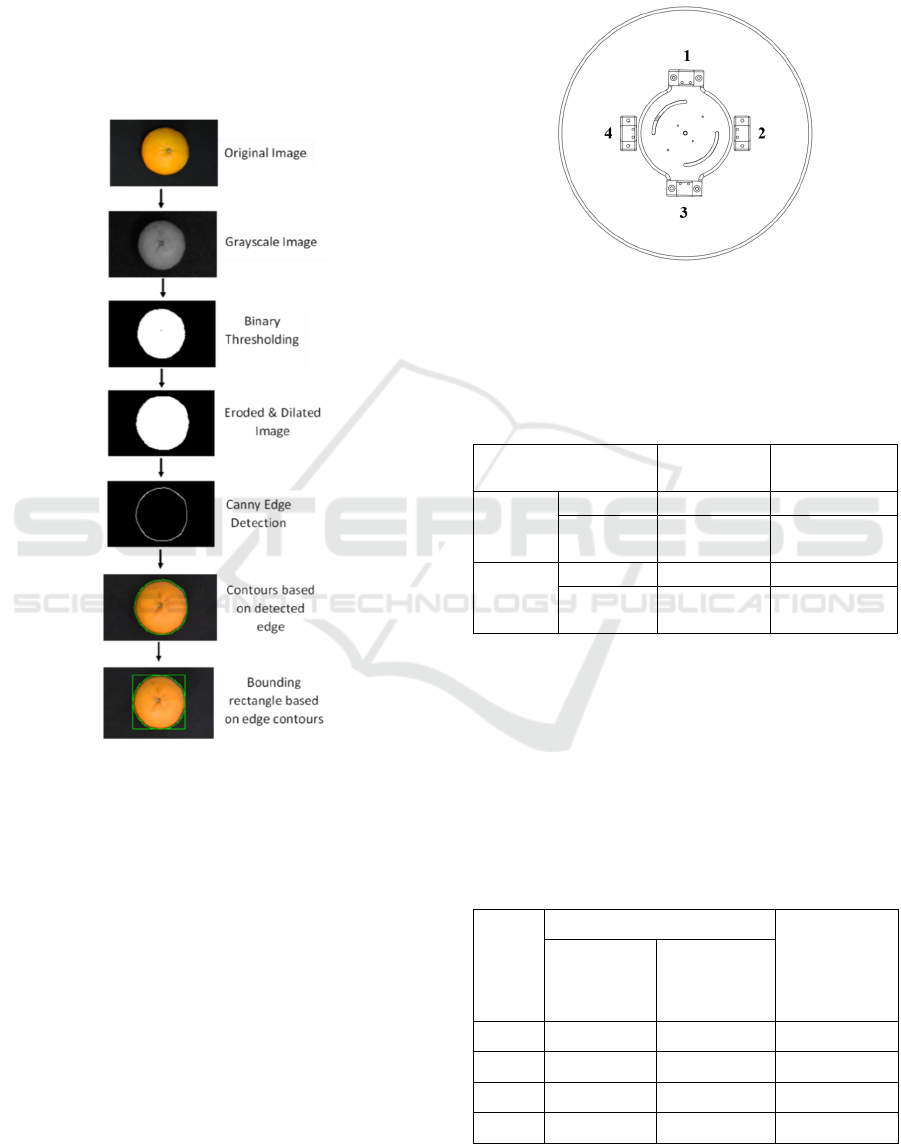
3.2 Elongation Factor Estimation
Machine vision is used to estimate the elongation
factor (EF) of the object. Spherical object’s EF is
approximately 1 (one). Before the EF calculation, the
edges contour of the object is traced using Canny
Edge Detection method. Canny is used because canny
is the best edge detection method compared to
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
972
Prewitt, Roberts, Sobel, and Laplacian of Gaussian
(LOG) edge detection method (Ansari et al., 2017;
Kumar Shah et al., 2020) and reference (Devi et al.,
2017; Luo et al., 2021; Phate et al., 2019; S. H. Tan
et al., 2021) used canny edge detection to detect the
edge contours of the food which is the object in this
study. The program is created on pycharm software
using OpenCV and NumPy library. Below are the
steps of EF estimation in this study.
Figure 4: Steps of EF estimation using machine vision.
The length-to-width ratio of the bounding
rectangle is the EF estimation of the object.
4 RESULTS
4.1 Conversion Mechanism
Repeatability Test
The conversion mechanism of the gripper is tested
with repeatability test. The test is executed by
changing the finger configuration 20 times. The
distance between fingers is measured before and after
the test. The expected result from this test is the
distance difference between fingers before and after
the test is as small as possible that show the
conversion mechanism has good repeatability
performance. Each finger is given number as
illustrated on figure 5.
Figure 5: Gripper's finger numbering.
The distance between finger 1-4 and 2-3 is
measured before and after the test. The results
provided on table 1.
Table 1: Distance between fingers.
Condition
Finger 1–4
Distance
Finger 2-3
Distance
Before
Parallel 21 m
m
21 m
m
Perpendi
cula
r
49 mm 49 mm
After
Parallel 21 m
m
21 m
m
Perpendi
cula
r
49 mm 49 mm
The results show no difference before and after
the test.
4.2 Machine Vision Accuracy Test
The test is excecuted by comparing the object’s EF
estimation by machine vision and manual
measurement. The results provided on table 2.
Table 2: EF estimation using manual measurement and
machine vision comparation.
Test
Elongation Factor
Error
(%)
Manual
Machine
Vision
1 1,04 1,04 0,00
2 1,01 1,01 0,00
3 1,03 1,01 1,94
4 1,04 1,05 0,96
Automatic Soft Gripper Implementation on Foods Using Machine Vision
973

T
able 2: EF estimation using manual measurement and
m
achine vision comparation. (cont.)
5 1,01 1,01 0,00
6 1,34 1,3 2,99
7 1,00 1,03 3,00
8 1,82 1,86 2,20
9 1,39 1,32 5,04
10 1,44 1,43 0,69
11 1,00 1,02 2,00
12 1,49 1,47 1,34
13 1,00 1,02 2,00
14 3,49 3,62 3,72
15 1,33 1,3 2,26
16 1,31 1,25 4,58
17 1,01 1,05 3,96
18 1,06 1,04 1,89
19 1,32 1,25 5,30
20 1,28 1,28 0,00
Average Error Rate 2,19
Based on the results, the machine vision has
97,81% accuracy compared to manual measurement.
4.3 Pick-and-Place Test
This test is executed by pick-and-place experiment
using bananas, oranges, round buns, and hot dog buns
5 times for each objects. The gripper attached to
UR5e arm robot.
Figure 6: Work Area.
If the object’s EF estimation is below 1.2,
perpendicular finger configuration will be used. If the
object’s EF is ≥ 1.2, parallel finger configuration will
be used. The representative result for each objects
provided on table 3.
Table 3: Pick-and-place results.
Documentation Status Documentation Status
Success
Success
Success
Success
The results show 100% success rate at pick-and-
place test. Experiments using round buns showing
some damaged part at the top of the buns. Based on
observation during experiments, it is caused by the
size of the buns is bigger than the opening size of the
gripper’s finger.
5 CONCLUSION
The results obtained in this study show that the
conversion mechanism of the finger configurations
on the soft gripper made has good repeatability
performance, the elongation factor estimation using
machine vision has accuracy up to 97,81% compared
to manual measurement, and food pick-and-place
experiment with 100% success rate. For upcoming
research, the opening size of the fingers suggested to
be bigger than the size of the objects to prevent
damage on the upper parts of the object.
ACKNOWLEDGEMENTS
This research is conducted in Automation and
Mechatronics Department’s sensor laboratory at
Bandung Polytechnic of Manufacturing. Thank you
for being allowed to use the laboratory.
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
974

REFERENCES
Ansari, Mohd. A., Kurchaniya, D., & Dixit, M. (2017). A
Comprehensive Analysis of Image Edge Detection
Techniques. International Journal of Multimedia and
Ubiquitous Engineering, 12(11), 1–12. doi:
10.14257/ijmue.2017.12.11.01
Devi, T. G., Neelamegam, DR. P., & Sudha, S. (2017).
Image Processing System for Automatic Segmentation
and Yield Prediction of Fruits using OpenCV.
International Conference on Current Trends in
Computer, Electrical, Electronics and Communication.
Gafer, A., Heymans, D., Prattichizzo, D., & Salvietti, G.
(2020). The Quad-Spatula Gripper: A Novel Soft-Rigid
Gripper for Food Handling. 2020 3rd IEEE
International Conference on Soft Robotics (RoboSoft).
doi: 10.1109/RoboSoft48309.2020.9115968
Hussain, I., Malvezzi, M., Gan, D., Iqbal, Z., Seneviratne,
L., Prattichizzo, D., & Renda, F. (2021). Compliant
gripper design, prototyping, and modeling using screw
theory formulation. International Journal of Robotics
Research, 40(1), 55–71. doi: 10.1177/0278364
920947818
Kumar Shah, B., Kedia, V., Raut, R., Ansari, S., & Shroff,
A. (2020). Evaluation and Comparative Study of Edge
Detection Techniques Related papers Evaluation and
Comparative Study of Edge Detection Techniques.
IOSR Journal of Computer Engineering (IOSR-JCE),
22(5), 6–15. doi: 10.9790/0661-2205030615
Luo, L., Liu, W., Lu, Q., Wang, J., Wen, W., Yan, D., &
Tang, Y. (2021). Grape berry detection and size
measurement based on edge image processing and
geometric morphology. Machines, 9(10). doi:
10.3390/machines9100233
Minh Dang, H., Thanh Vo, C., Tran Trong, N., Duc
Nguyen, V., Binh Phung, V., Minh City, C., & Chi
Minh City, H. (2021). Design and development of the
soft robotic gripper used for the food packaging system.
In Journal of Mechanical Engineering Research and
Developments (Vol. 44, Issue 3).
Mishra, A. K., del Dottore, E., Sadeghi, A., Mondini, A., &
Mazzolai, B. (2017). SIMBA: Tendon-driven modular
continuum arm with soft reconfigurable gripper.
Frontiers Robotics AI, 4(FEB). doi: 10.3389/
frobt.2017.00004
Navas, E., Fernández, R., Sepúlveda, D., Armada, M., &
Gonzalez-De-santos, P. (2021). Soft grippers for
automatic crop harvesting: A review. In Sensors (Vol.
21, Issue 8). MDPI AG. doi: 10.3390/s21082689
Patel, K. K., Kar, A., & Khan, M. A. (2021). Rapid
Assessment of Some Physical Parameters of Mangoes
Using Monochrome Computer Vision. Agricultural
Research, 10(3), 468–482. doi: 10.1007/s40003-020-
00517-9
Phate, V. R., Malmathanraj, R., & Palanisamy, P. (2019).
Classification and weighing of sweet lime (Citrus
limetta) for packaging using computer vision system.
Journal of Food Measurement and Characterization,
13(2), 1451–1468. doi: 10.1007/s11694-019-00061-3
Shintake, J., Cacucciolo, V., Floreano, D., & Shea, H.
(2018). Soft Robotic Grippers. In Advanced Materials
(Vol. 30, Issue 29). Wiley-VCH Verlag. doi:
10.1002/adma.201707035
Tan, N., Gu, X., & Ren, H. (2018). Design, characterization
and applications of a novel soft actuator driven by
flexible shafts. Mechanism and Machine Theory, 122,
197–218. doi: 10.1016/j.mechmachtheory.2017.12.021
Tan, S. H., Lam, C. K., Kamarudin, K., Ismail, A. H.,
Rahim, N. A., Azmi, M. S. M., Yahya, W. M. N. W.,
Sneah, G. K., Seng, M. L., Hai, T. P., & Lye, O. T.
(2021). Vision-Based Edge Detection System for Fruit
Recognition. Journal of Physics: Conference Series,
2107(1). doi: 10.1088/1742-6596/2107/1/012066
Wang, Zhangkui, & Hirai, S. (2018). Geometry
and Material Optimization of A Soft Pneumatic
Gripperfor Handling Deformable Object.
International Conference on Robotics and Biomimetics.
Wang, Zhongkui, Chathuranga, D. S., & Hirai, S. (2016).
3D Printed Soft Gripper for Automatic Lunch Box
Packing. International Conference on Robotics and
Biomimetics, 503–508. doi: 10.1109/ROBIO.
2016.7866372
Wang, Zhongkui, Or, K., & Hirai, S. (2020). A dual-mode
soft gripper for food packaging. Robotics and
Autonomous Systems, 125. doi: 10.1016/j.
robot.2020.103427
Wang, Zhongkui, Torigoe, Y., & Hirai, S. (2017). A
Prestressed Soft Gripper: Design, Modeling,
Fabrication, and Tests for Food Handling. IEEE
Robotics and Automation Letters, 2(4), 1909–1916.
doi: 10.1109/LRA.2017.2714141
Wang, Zhongkui, Zhu, M., Kawamura, S., & Hirai, S.
(2017). Comparison of different soft grippers for lunch
box packaging. Robotics and Biomimetics, 4(1). doi:
10.1186/s40638-017-0067-1
Zaidi, S., Maselli, M., Laschi, C., & Cianchetti, M. (2021).
Actuation Technologies for Soft Robot Grippers and
Manipulators: A Review. Current Robotics Reports,
2(3), 355–369. doi: 10.1007/s43154-021-00054-5
Zhong, G., Hou, Y., & Dou, W. (2019). A soft pneumatic
dexterous gripper with convertible grasping modes.
International Journal of Mechanical Sciences, 153–154,
445–456. doi: 10.1016/j.ijmecsci.2019.02.028.
Automatic Soft Gripper Implementation on Foods Using Machine Vision
975
